Схемы на микросхеме К155ЛА3
RADIODETECTOR
Радиоэлектроника, схемы, статьи
и программы для радиолюбителей.
Стать автором
Вход
Регистрация
-
Вопрос/Ответ
-
Литература
-
Радиотовары с Aliexpress
-
Объявления
-
Пользователи
Содержание
- 1 Распиновка микросхемы К155ЛА3
- 2 Характеристики микросхемы К155ЛА3
- 3 Аналоги микросхемы К155ЛА3
- 4 Схемы на микросхеме К155ЛА3
- 4.1 Схема звукового генератора
- 4.
 2 Радиомикрофон
2 Радиомикрофон - 4.3 Мигалка
- 4.4 Мультивибратор
- 4.5 Логический пробник
 2 Радиомикрофон
2 РадиомикрофонМикросхема К155ЛА3 ТТЛ логики, производства советских времен. Довольно Широко применялась в различных отраслях бытовой аппаратуре. Разнообразные схемы на микросхеме К155ЛА3 можно собрать имея минимум деталей.
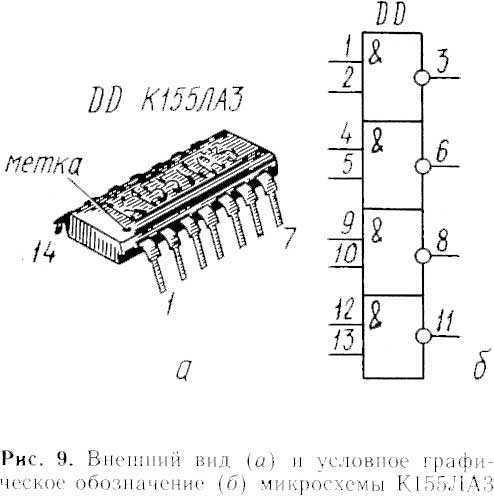
Содержит в своем составе 4 логических элемента 2И-НЕ, размещенные в корпусе DIP-14
Распиновка микросхемы К155ЛА3
Нумерация ног начинается от ключа на корпусе против часовой стрелки.
Характеристики микросхемы К155ЛА3
| Наименование параметра | Значение |
Напряжение питания | 5В+-5% |
Максимальное напряжение лог. «0» | <0.4В |
минимальное напряжение лог «1» | >2.4В |
Ток потребеления при лог. | <22mA |
Ток потребеления при лог. «1» и Uпит=5В | <8mA |
Входной ток низкого уровня | <1,6 mA |
Входной ток высокого уровня | <0,04 mA |
Входной пробивной ток | <1 mA |
Ток КЗ | 18-55 mA |
Потребляемая мощность одного элемента | <19,7mВт |
Время задержки распространения сигнала при включении | <15нс |
Время задержки распространения сигнала при выключении | <22нС |
 «0» и Uпит=5В
«0» и Uпит=5ВАналоги микросхемы К155ЛА3
Импортный аналог микросхемы К155ЛА3 это SN7400(или просто -7400, без SN)
Схемы на микросхеме К155ЛА3
Схема звукового генератора
Очень простая схема звукового генератора, на 1 резисторе и конденсаторе.
Радиомикрофон
В эту схему в цепи обратной связи введены два элемента задающие частоту импульсов — микрофон и конденсатор. Эта так называемая RC времязадающая цепочка будет появляться во всех последующих схемах с небольшими вариациями.
Мигалка
Обычная мигалка, частота мигания задается путем изменения емкости С1 и значения сопротивления R1.
Мультивибратор
По сути тут тот же генератор импульсов только тут 2 выхода импульсы на короторых появляются поочередно.
Логический пробник
Похожие записи
Микросхема NE555 — представляет собой универсальный таймер, используется для генерации одиночных и повторяющихся импульсов со стабильными временными характеристиками. Она не дорогая и…
11 Мар 2022
- 1049
- 0
Микросхема К155ЛА3 ТТЛ логики, производства советских времен. Довольно Широко применялась в различных отраслях бытовой аппаратуре. Разнообразные схемы на микросхеме К155ЛА3 можно собрать имея…
Довольно Широко применялась в различных отраслях бытовой аппаратуре. Разнообразные схемы на микросхеме К155ЛА3 можно собрать имея…
21 Дек 2021
- 6738
- 0
Некоторые считают, что изготовление печатной платы по технологии ЛУТ– бессмысленное и хлопотное занятие. Если учесть, что современные элементы уже совсем отличные от DIP корпусов, то и…
22 Ноя 2020
- 2497
- 0
Паяльник для радиолюбителя, наверное самая главная вещь в его арсенале, поэтому к выбору паяльника следует подойти ответственно и знать какие бывают паяльники на что стоит обратить. ..
..
17 Дек 2019
- 3429
- 0
Если вы нашли ошибку в статье, или на сайте. Можете сообщить об этом воспользовавшись формой.
Ваше имя
Ваше почта
Сообщение
Сообщение
Администрация сайта свяжется с Вами в ближайшее время.
Скачать
К155ЛА3
Поделиться ссылкой:
|
|  png»> png»> |
Цифровая интегральная микросхема ТТЛ логики, производства советских времен. Широко применялась в бытовой аппаратуре. Часто использовалась радиолюбителями при создании различных устройств на основе цифровых микросхем. Содержит 4 логических элемента (вентиля) 2И-НЕ, в корпусе DIP-14
Микросхема К155ЛА3 имеет тип корпуса — 201.14-1 — пластиковый, с массой не более 1г. А для КМ155ЛА3 тип корпуса 201.14-8 — металлокерамический, с массой не более 2г., соответственно имеет расширенные температурные характеристики. Внутри содержится 56 элементов Нумерация ног начинается от ключа на корпусе против часовой стрелки.
Аналоги К155ЛА3 — SN7400N, SN7400J (полностью совпадают по цоколевке и характеристикам)
Параметры К155ЛА3:
Таблица истинности К155ЛА3:
Схема одного элемента микросхемы:
Анекдот:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Полевые транзисторы Содержимое 2 Транзисторы GBT Содержимое 3 Цифровые микросхемы Аналоговые микросхемы Содержимое 5 Конденсаторы Содержимое 7
| Устроства для начинающих Электроника для авто Устройства для дома Источники питания Устройства на микроконтроллерах Ремонт бытовой аппаратуры Содержимое 6 Разное Содержимое 7
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Здесь может быть Ваша реклама
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 «0»
«0»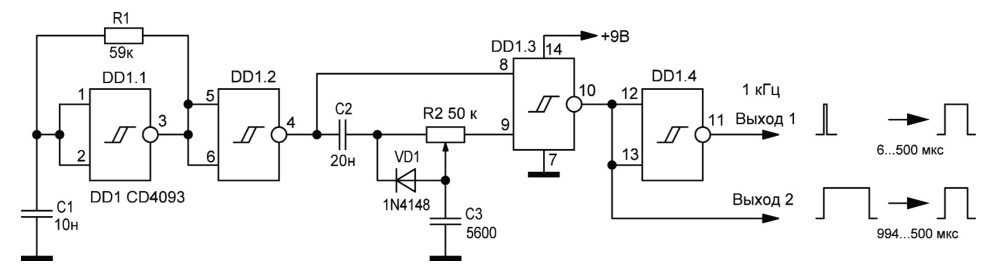
Создание робота с голосовым управлением с помощью Tensil и Arty A7 — Часть II
Введение
Это часть II учебного пособия, состоящего из двух частей, в котором мы продолжим изучать, как создать робота, управляемого голосом, с использованием среды ускорения машинного обучения (ML) Tensil с открытым исходным кодом, платы Digilent Arty A7-100T FPGA и шасси Pololu Romi.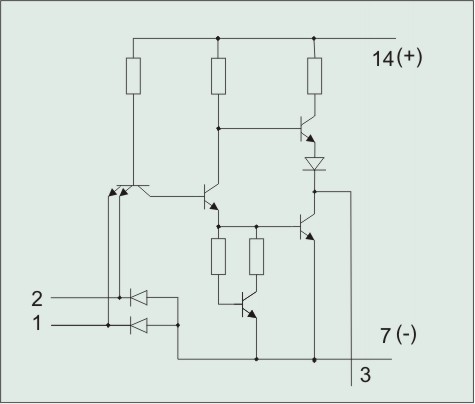 В части I мы сосредоточились на распознавании речевых команд через микрофон. Часть II будет посвящена преобразованию команд в поведение робота и интеграции с шасси Romi.
В части I мы сосредоточились на распознавании речевых команд через микрофон. Часть II будет посвящена преобразованию команд в поведение робота и интеграции с шасси Romi.
Архитектура системы
Давайте начнем с рассмотрения архитектуры системы, которую мы представили в части I. Мы представили два высокоуровневых компонента: Sensor Pipeline и State Machine . Sensor Pipeline непрерывно получает сигнал микрофона в качестве входных данных и выводит события, представляющие одну из четырех команд. State Machine получает командное событие и соответствующим образом изменяет свое состояние. Это состояние представляет собой то, что робот делает в данный момент, и используется для управления двигателем.
Сначала мы займемся государственной машиной и управлением моторами. После этого мы свяжем все это вместе и соберем робота на шасси.
После этого мы свяжем все это вместе и соберем робота на шасси.
Конечный автомат отвечает за управление текущим состоянием двигателей. Он получает командные события и в зависимости от команды изменяет состояние двигателя. Например, когда он получает «вперед!» команда поворачивает оба мотора вперед; когда оно получает «право!» команда поворачивает правый двигатель назад, а левый вперед.
Конвейер датчиков создает события, содержащие команду и вероятность ее предсказания. Как мы упоминали ранее, модель ML способна предсказывать 12 классов команд, из которых наш робот использует только 4. Итак, во-первых, мы фильтруем события для известных команд. Во-вторых, мы используем пороговое значение для каждой команды для фильтрации с достаточной вероятностью. Во время тестирования эти пороги можно настроить, чтобы найти наилучший баланс между ложными отрицательными и ложными положительными результатами для каждой команды.
Экспериментируя с Sensor Pipeline, мы видим, что он может генерировать несколько событий для одной и той же голосовой команды.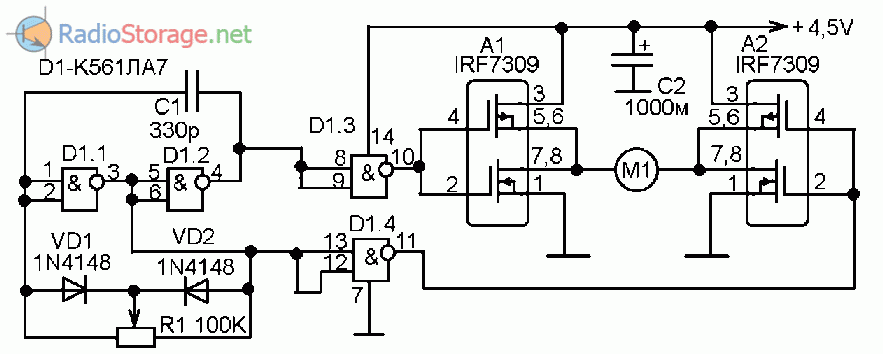 Обычно серия этих экземпляров включает одну и ту же прогнозируемую команду. Это происходит потому, что распознавание происходит в скользящем окне, где звуковой образ может быть включен в несколько последовательных окон. Иногда серия начинается с правильно распознанной команды, за которой следует неправильная. Это происходит, когда усеченный звуковой образец в последнем окне неправильно предсказан. Чтобы сгладить эти эффекты, мы вводим состояние «устранения дребезга». Состояние устранения дребезга предотвращает изменение состояния двигателя в течение фиксированного периода времени после последнего изменения.
Обычно серия этих экземпляров включает одну и ту же прогнозируемую команду. Это происходит потому, что распознавание происходит в скользящем окне, где звуковой образ может быть включен в несколько последовательных окон. Иногда серия начинается с правильно распознанной команды, за которой следует неправильная. Это происходит, когда усеченный звуковой образец в последнем окне неправильно предсказан. Чтобы сгладить эти эффекты, мы вводим состояние «устранения дребезга». Состояние устранения дребезга предотвращает изменение состояния двигателя в течение фиксированного периода времени после последнего изменения.
Еще один эффект, наблюдаемый при использовании Sensor Pipeline, заключается в том, что в самом начале буферы сбора данных и спектрограммы частично пусты (заполнены нулями). Иногда это приводит к неверным предсказаниям сразу после инициализации. Поэтому будет полезно войти в состояние устранения дребезга сразу после инициализации.
Устранение дребезга реализовано в State Machine путем введения эквивалента настенных часов.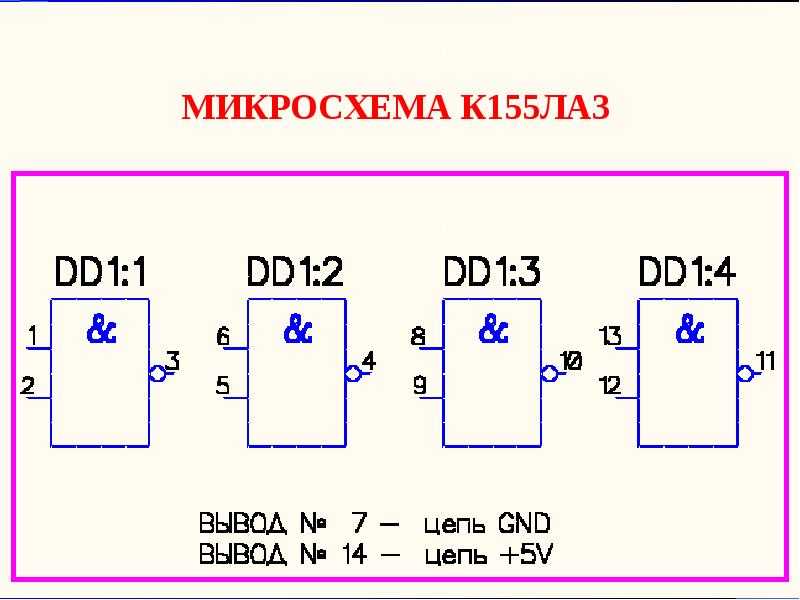 Часы представлены счетчиком тиков внутри структуры состояния. Этот счетчик сбрасывается до максимума при каждом изменении состояния двигателя и уменьшается при каждой итерации основного цикла. Как только часы обнуляются, конечный автомат выходит из состояния устранения дребезга и начинает принимать новые команды.
Часы представлены счетчиком тиков внутри структуры состояния. Этот счетчик сбрасывается до максимума при каждом изменении состояния двигателя и уменьшается при каждой итерации основного цикла. Как только часы обнуляются, конечный автомат выходит из состояния устранения дребезга и начинает принимать новые команды.
Вы можете посмотреть на реализацию конечного автомата в исходном коде речевого робота.
Управление двигателем
Для того, чтобы двигатели вращались, к его клеммам M- ( M1 ) и M+ ( M2 ) должна быть приложена разность потенциалов (напряжения). Сила и полярность этого напряжения определяют скорость и направление движения.
Мы используем PMOD HB3 для управления этим напряжением с помощью цифровых сигналов.
Полярность контролируется одним цифровым проводом. Это значение для левого и правого двигателей создается компонентом Xilinx AXI GPIO и подключается к контактам MOTOR_DIR[1:0] на модулях PMOD.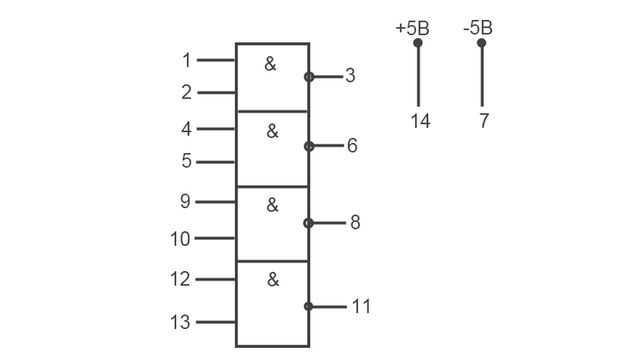 Конечный автомат отвечает за установку битов направления через регистр AXI GPIO.
Конечный автомат отвечает за установку битов направления через регистр AXI GPIO.
Сила напряжения регулируется формой волны ШИМ. Этот сигнал имеет фиксированную частоту (2 кГц) и использует соотношение между высокой и низкой частями периода (рабочий цикл), чтобы указать долю максимального напряжения, подаваемого на двигатель. Следующая диаграмма из справочного руководства HB3 показывает, как это работает.
Для генерации сигнала ШИМ мы используем Xilinx AXI Timer. Мы использовали специальный экземпляр таймера для каждого двигателя, чтобы обеспечить независимое управление скоростью. Выход AXI Timer pwm подключен к выводу MOTOR_EN на модулях PMOD. Конечный автомат отвечает за установку общего и высокого периодов сигнала через драйвер AXI Timer от Xilinx.
Вы можете посмотреть на реализацию управления двигателем в исходном коде речевого робота.
Сборка шасси
В качестве механической платформы для речевого робота мы выбрали Pololu Romi. Это шасси простое, легкое в сборке и недорогое. Он также имеет встроенный батарейный отсек для 6 батареек типа АА, а также хороший распределительный щит, который выдает напряжение, достаточное для питания двигателей и платы Arty A7. Pololu также предоставляет расширительную пластину для шасси, чтобы удобно разместить плату Arty A7.
Это шасси простое, легкое в сборке и недорогое. Он также имеет встроенный батарейный отсек для 6 батареек типа АА, а также хороший распределительный щит, который выдает напряжение, достаточное для питания двигателей и платы Arty A7. Pololu также предоставляет расширительную пластину для шасси, чтобы удобно разместить плату Arty A7.
Ниже приводится перечень материалов для всех необходимых компонентов от Pololu.
| Деталь | Количество |
|---|---|
| Комплект шасси Romi | 1 |
| Плата распределения питания для шасси Romi | 1 |
| Комплект пар энкодера Romi, 12 CPR, 3,5–18 В | 1 |
| Плата расширения шасси Romi | 2 |
| Алюминиевая стойка: длина 1-1/2 дюйма, резьба 2-56, M-F (4 шт. в упаковке) | 1 |
| Крепежный винт: № 2-56, длина 5/16″, крестообразный (25 шт. в упаковке) | 1 |
Гайка с шестигранной головкой: #2-56 (25 шт.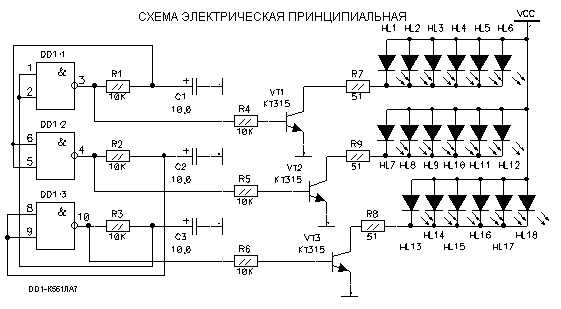 в упаковке) в упаковке) | 1 |
| 0,100” (2,54 мм) разъемная вилка: 1×40-контактный, прямой, черный | 1 |
| Проволочная перемычка Premium, 50 шт., набор из 10 цветов, F-F 6 дюймов | 1 |
| Проволочная перемычка Premium, 50 шт., набор из 10 цветов, M–F 6 дюймов | 1 |
Pololu содержит потрясающее видео, в котором подробно описан процесс сборки корпуса. Обязательно посмотрите, прежде чем начинать паять плату распределения питания!
Перед тем, как установить плату распределения питания, пришло время прогреть паяльник. Припаяйте два разъема 8×1 к клеммам VBAT, VRP, VSW и земле. Вы можете использовать малярную ленту, чтобы зафиксировать разъемы на месте во время пайки.
Затем поместите плату распределения питания на шасси так, чтобы клеммы аккумулятора выступали из соответствующих отверстий. Используйте винты, чтобы закрепить его. Теперь припаиваем клеммы к плате.
Вставьте батарейки и нажмите кнопку питания. Синий светодиод должен загореться.
Затем припаяйте разъемы 6×1 к каждой из плат энкодера двигателя (Примечание! Используйте тот же разъемный штыревой разъем, который используется с платой распределения питания, а не тот, который входит в комплект поставки энкодера). Затем поместите плату энкодера на каждый двигатель, чтобы двигатель клеммы высовываются через отверстия и припаиваются к ним.
Наконец, вставьте двигатели в шасси и подключите их к HB3 PMOD (соедините M- с M1 и M+ с M2 ). Подключите HB3 PMOD VM к одной из клемм VSW и GND к GND на распределительном щите. Подключите плату Arty A7 и протестируйте все вместе!
Если все работает, продолжаем финальную сборку. Соедините две пластины расширения с помощью 2 винтов и закрепите их на шасси с помощью 4 стоек. Установите колеса и шариковый ролик. Поместите плату Arty A7 и PMOD HB3 поверх поверхности, образованной двумя удлинительными пластинами. Вы можете использовать двусторонний клей, чтобы держать их на месте. Мы предлагаем использовать провод калибра 18, чтобы поднять PMOD MIC3 над шасси, чтобы избежать влияния шума двигателей на микрофон.
Установите колеса и шариковый ролик. Поместите плату Arty A7 и PMOD HB3 поверх поверхности, образованной двумя удлинительными пластинами. Вы можете использовать двусторонний клей, чтобы держать их на месте. Мы предлагаем использовать провод калибра 18, чтобы поднять PMOD MIC3 над шасси, чтобы избежать влияния шума двигателей на микрофон.
Заключение
Во второй части руководства мы узнали, как спроектировать конечный автомат для речевого робота и как взаимодействовать с драйверами двигателей. Затем мы интегрировали все детали в шасси Pololu Romi. Теперь, когда у вас есть функционирующий робот, который подчиняется вашим командам, мы предлагаем вам расширить его и использовать оставшиеся 6 команд, которые может предсказать наша модель машинного обучения!
Быстрая сборка схем на макетных платах без пайки
Рассмотрим конструкцию и назначение макетных плат без пайки. В чем их преимущество перед другими видами сборки, и как с ними работать, а также какие схемы можно быстро собрать для новичка.
Фон
Первая проблема, с которой сталкивается радиолюбитель, это даже не отсутствие теоретических знаний, а отсутствие средств и знаний о том, как устанавливать электронные устройства. Если вы не знаете, как работает та или иная деталь, это не помешает вам подключить ее по принципиальной схеме, но для того, чтобы четко и качественно собрать схему, вам понадобится печатная плата. Чаще всего их изготавливают методом ЛУТ, но не у всех есть лазерный принтер. Наши отцы и деды раскрашивали доски вручную лаком для ногтей или красками, а потом травили.
Тут новичка настигает вторая проблема — нехватка реагентов для травления. Да, конечно, хлорное железо продается в каждом магазине электронных компонентов, но сначала нужно много чего купить и изучить, поэтому просто сложно уделить внимание технологии травления плат из фольгированного текстолита или гетинакс. Да и не только новичкам, но и опытным радиолюбителям иногда нет смысла травить плату и тратиться на недоделку на этапах ее ввода в эксплуатацию.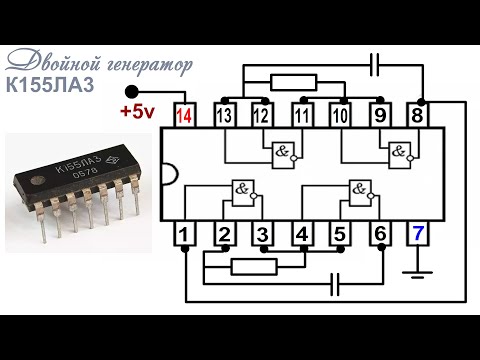
Во избежание проблем с поиском хлорного железа, текстолита, принтера, а также не получить от жены (матери) за несанкционированное использование железа, можно потренироваться в установке электронных устройств на паяльных макетных платах.
Что такое макетная плата без пайки?
Как следует из названия, это такая плата, на которой можно собрать макет устройства без использования паяльника. Макетная модель — как ее называют в народе — в магазинах есть разных размеров и модели несколько отличаются по компоновке, но принцип работы и их внутреннее устройство одинаковы.
Макет состоит из корпуса из АБС-пластика, в котором находятся разъемные соединения, напоминающие сдвоенные металлические шины, между которыми зажат проводник. На передней части корпуса отверстия пронумерованы и отмечены, в корпуса с выводами можно вставлять провода, ножки микросхемы, транзисторы и другие радиодетали. Взгляните на картинку ниже, на ней я все это изобразил.
На рассматриваемой печатной плате крайние два столбца отверстий с каждой стороны вертикально соединены общими шинами, из которых обычно формируется шина плюсового контакта источника питания и минусовая (общая шина).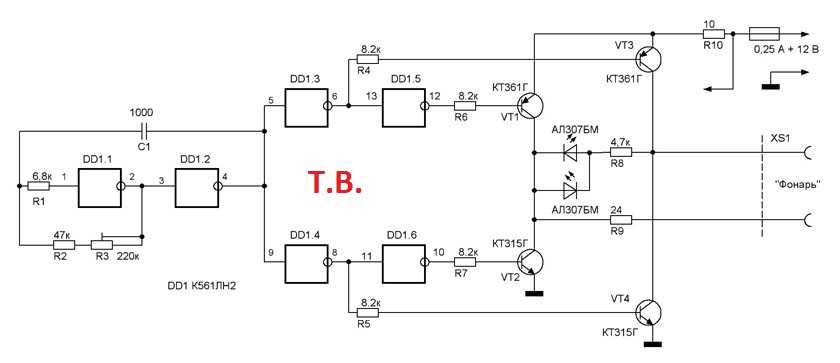 Обычно обозначается красной и синей полосой по краю платы плюсом и минусом соответственно.
Обычно обозначается красной и синей полосой по краю платы плюсом и минусом соответственно.
Средняя часть доски разделена на две части, каждая из частей совмещена в ряды по пять отверстий подряд именно на этой доске. На рисунке показано схематическое соединение отверстий (сплошные черные линии).
Внутренняя структура платы показана на рисунке ниже. Двойные шины зажимают проводники, как показано на рисунке. Жирные линии обозначают внутренние соединения.
Такие платы в англоязычной среде называются Breadboard по этому названию, найти можно на aliexpress и подобных интернет-магазинах.
Как с ней работать?
Просто вставьте ножки электронных компонентов в отверстия, соединив детали между собой горизонтальными линиями, а с крайних вертикалей подайте питание. Если вам нужен джампер, вы часто используете специальные с тонкими штекерами на конце, в магазинах их можно найти под названием «дюпон джемперы» или джамперы для ардуино, кстати, его тоже можно вставить в такой макет и собирать свои проекты.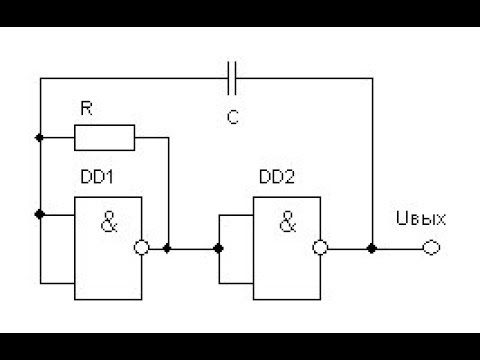
Если вам не хватило размеров одной макетной платы, можно объединить несколько, это как пазлы вставленные друг в друга, обратите внимание на первую картинку в статье, схема собрана на двух соединенных платах. На одном из них шип, а на другом углубление, скошенное от внешней части к корпусу доски, чтобы конструкция не развалилась.
Сборка простых схем на макетной плате
Начинающему радиолюбителю важно быстро собрать схему, чтобы убедиться в ее работоспособности и понять, как она работает. Давайте посмотрим, как разные схемы выглядят на макетной плате.
Схема симметричного мультивибратора рекомендуется как первая для многих новичков, она позволяет научиться соединять детали последовательно и параллельно, а также определять разводку транзисторов. Его можно собрать настенным монтажом или печатной платой, но для этого требуется пайка, а настенный монтаж, несмотря на его простоту, на самом деле очень сложен для новичков и чреват короткими замыканиями или плохим контактом.
Посмотрите, как просто это выглядит на макетной плате без пайки.
Кстати, обратите внимание, здесь не использовались перемычки Dupont. В общем, не всегда их можно найти в радиомагазинах, а особенно в магазинах небольших городов. Вместо него можно использовать провода от интернет-кабеля (Витая пара), они изолированы, а жила не покрыта лаком, что позволяет быстро оголить конец кабеля, сняв небольшой слой изоляции, и вставить его в разъем на плате.
Соединять детали можно как угодно, лишь бы получилась нужная схема, здесь та же схема, но собрана немного иначе.
Кстати, для описания соединений можно использовать маркировку платы, столбцы обозначаются буквами, а ряды цифрами.
Для ваших разработок есть такие блоки питания, у них есть штекеры, которые монтируются в беспаечную плату подключением к «+» и «-» шинам. Он удобен, имеет переключатель и линейный малошумящий регулятор напряжения. В общем, вам не составит труда самостоятельно развести такую плату и собрать ее.
Вот так можно подключить светодиод, например, для проверки. На картинке показан более «продвинутый» вариант платы с зажимными клеммами для подключения источника питания. Анод светодиода подключается к плюсу питания (красная шина), а катод к горизонтальной шине рабочего участка, где он подключается к токоограничивающему резистору.
Блок питания выполнен на основе линейного стабилизатора типа L7805, или любой другой микросхемы серии L78xx, где xx — необходимое вам напряжение.
Собрана схема пищалки на логике. Правильное название такой схемы — Генератор импульсов на логических элементах типа 2i-ne. Для начала ознакомьтесь со схемой электрической цепи.
В качестве логической микросхемы подойдет отечественная К155ЛА3 или зарубежная типа 74НС00. Элементы R и C задают рабочую частоту. Вот его реализация на плате без пайки.
Справа, запечатанный белой бумагой — зуммер. Его можно заменить светодиодом, если уменьшить частоту.
Чем больше сопротивление ИЛИ, тем ниже частота.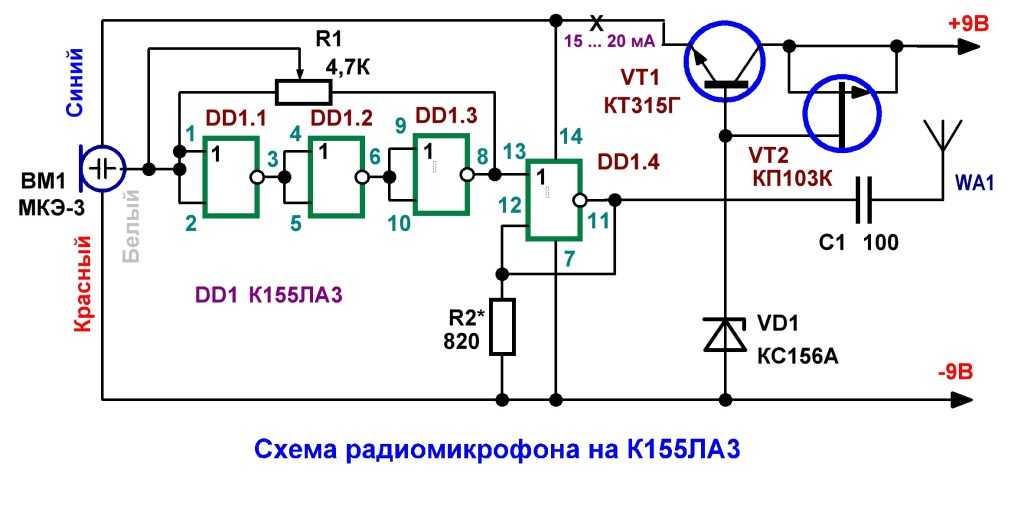
А вот как выглядит типичный проект Ардуинчика на стадии тестирования и разработки (а иногда и в окончательном виде, смотря насколько он ленив).
Собственно благодаря проекту Arduino в последние годы популярность «сумасшедших» значительно возросла. Они позволяют быстро собирать схемы и проверять их работоспособность, а также использовать в качестве разъема для прошивки микросхем в DIP-корпусе и в других случаях при наличии переходника.
Ограничения макетной платы без пайки
Несмотря на свою простоту и очевидные преимущества перед пайкой, макетные платы без пайки имеют ряд недостатков. Дело в том, что не все схемы нормально работают в таком исполнении, давайте рассмотрим подробнее.
Перегрузочные и паразитные компоненты
На беспаечных макетах не рекомендуется собирать мощные преобразователи, а тем более импульсные схемы. Первые нормально работать не будут из-за пропускной способности контактных дорожек по току.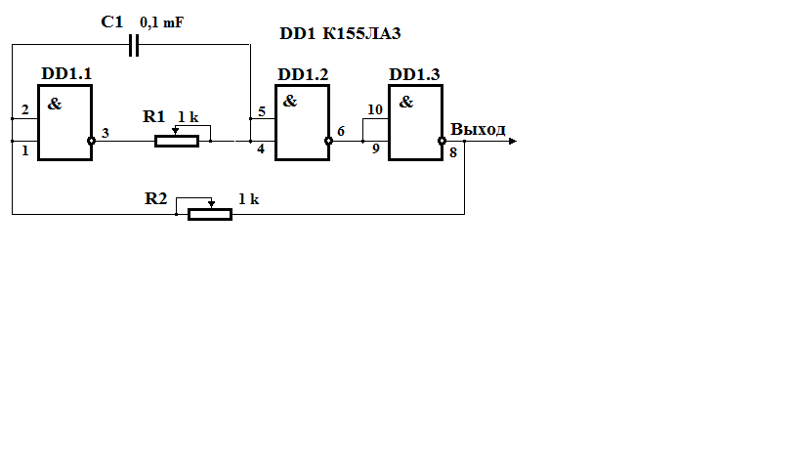 Не лезьте за токи более 1-2 Ампер, хотя в интернете есть отчеты, включающие 5 Ампер, делайте выводы сами и экспериментируйте.
Не лезьте за токи более 1-2 Ампер, хотя в интернете есть отчеты, включающие 5 Ампер, делайте выводы сами и экспериментируйте.
Импульсные цепи могут вообще не работать из-за большого количества паразитных емкостей и индуктивностей в цепи. Расположение шин таково, что они идут вдоль друг друга и имеют достаточно большую площадь. Это вызывает ненужные помехи и не улучшает стабильность импульсных и прецизионных схем.
Электробезопасность
Не забывайте, что высокое напряжение опасно для жизни. Макетировать устройства, работающие, например, от сети 220 В, категорически ЗАПРЕЩЕНО. Хоть клеммы и закрыты пластиковой панелью, но куча проводников и перемычек может привести к случайному короткому замыканию или поражению электрическим током!
Вывод
Беспаечная макетная плата подходит для простых схем, аналоговых схем, не предъявляющих высоких требований к электрическим соединениям и точности, автоматики и цифровых схем, которые не работают на высоких скоростях (Гигагерцы и десятки Мегагерц слишком).