Драйвер мотора на 43А BTS7960 для Arduino
Модуль управления мотором RKP-BTS7960 на микросхеме BTS7960.
С его помощью можно управлять одним коллекторным двигателем (DC-мотором). Драйвер рассчитан на напряжение питания двигателя от 5.5 до 27.5 Вольт постоянного тока до 43 А.
Но так как клеммник установленный на плате не рассчитан на такие токи, то для долговременной работы рекомендуется использовать двигатели с током потребления до 10 А. С помощью данного драйвера можно управлять скоростью двигателя, направлением его движения, выполнять торможение и контролировать нагрузку которую испытывает двигатель.
- Драйвер RKP-BTS7960 – мощный интегральный полумостовой драйвер, разработанный компанией Infineon для интеллектуального управления электродвигателями.
- Выполнен на быстродействующих чипах BTS7960 с низким внутренним сопротивлением, поэтому является идеальным решением для проектов с высоким энергопотреблением.
- Модуль поддерживает управление двигателем с помощью ШИМ при максимальной частоте 25 КГц, имеет защиту от короткого замыкания, перегрева и превышения выходного напряжения.

- Возможность каскадного соединения с аналогичными модулями.
- Модуль драйвера совместим с любыми микроконтроллерами, в том числе и Arduino.

Характеристики RKP-BTS7960:
Микросхема драйвера: BTS7960
Напряжение питания двигателя: от 5.5 до 27.5 В постоянного тока (вне указанного диапазона драйвер перейдёт в режим защиты)
Напряжение питания логики: 5 В постоянного тока
Максимальная частота ШИМ на управляющих выводах: 25 кГц
Максимально допустимы ток мотора: 43 А (кратковременно)
Максимально допустимы ток мотора: 10 А (долговременно)
Напряжение логических уровней на управляющих выводах: 3.3 или 5 В
Внутреннее сопротивление 16 мОм
Размер: 40 x 50 х 12 мм
Вес: 50 гр.
Описание четырехконтактного разъема с винтовыми зажимами:
• М+ – подключение электродвигателя
• М- – подключение электродвигателя
• B+ – подключение плюсового вывода внешнего мощного источника питания для электродвигателя от 5. 5 до 27.5 Вольт
5 до 27.5 Вольт
• B- – подключение минусового вывода внешнего мощного источника питания для электродвигателя от 5.5 до 27.5 Вольт
Описание восьмиконтактного разъема:
VCC – напряжение питания +5 В от платы микроконтроллера
GND – общий провод питания GND от платы микроконтроллера
R_EN – разрешение включения вращения электродвигателя в одну сторону (HIGH)
L_EN – разрешение включения вращения электродвигателя в противоположную сторону (HIGH)
RPWM – уровень сигнала PWM для регулирования скорости включения вращения электродвигателя в одну сторону
LPWM – уровень сигнала PWM для регулирования скорости включения вращения электродвигателя в противоположную сторону
R_IS – для отслеживания уровня тока при вращении электродвигателя в одну сторону
L_IS – для отслеживания уровня тока при вращении электродвигателя в противоположную сторону
Подключение и управление драйвером BTS7960 смотрите на вкладке «Подключение драйвера».
Arduino драйвер двигателя l298n в категории «Телекоммуникации и связь»
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino DS
Доставка по Украине
191. 22 грн
22 грн
95.61 грн
Купить
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino PD
Доставка по Украине
172.57 грн
86.28 грн
Купить
Paid
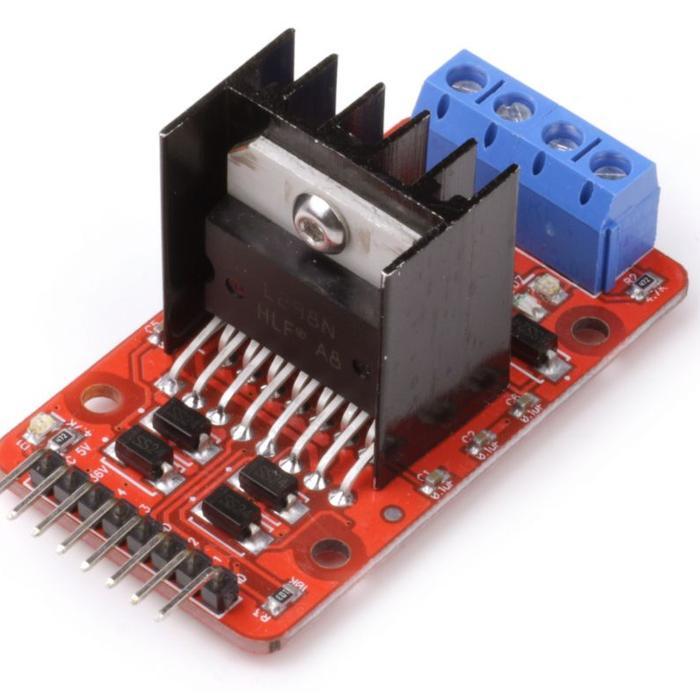
Драйвер L298N модуль шагового двигателя Arduino
На складе в г. Вознесенск
Доставка по Украине
69 грн
Купить
ArduinoKit обучающие наборы
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе в г. Ровно
Доставка по Украине
35 грн
Купить
PROMRV
Драйвер двигателя MX1508 Arduino (аналог L298N) [#2-1]
На складе в г. Запорожье
Доставка по Украине
24 грн
Купить
Ardu.prom.ua (наложка НП от 150 грн!)
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
Доставка из г. Ровно
по 35 грн
от 9 продавцов
35 грн
Купить
Интернет-магазин DobroDIY
Драйвер шагового двигателя и двигателя постоянного тока L298N для Arduino
Доставка по Украине
66. 70 грн
70 грн
Купить
StandartPower
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino, 102839
На складе в г. Ровно
Доставка по Украине
45 грн
Купить
Интернет магазин » Горячий Стиль «
Драйвер шагового двигателей L298N 5V 2A Arduino
На складе в г. Умань
Доставка по Украине
104 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе в г. Умань
Доставка по Украине
28 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе
Доставка по Украине
по 35 грн
от 4 продавцов
35 грн
Купить
Интернет-магазин Zerus
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе в г.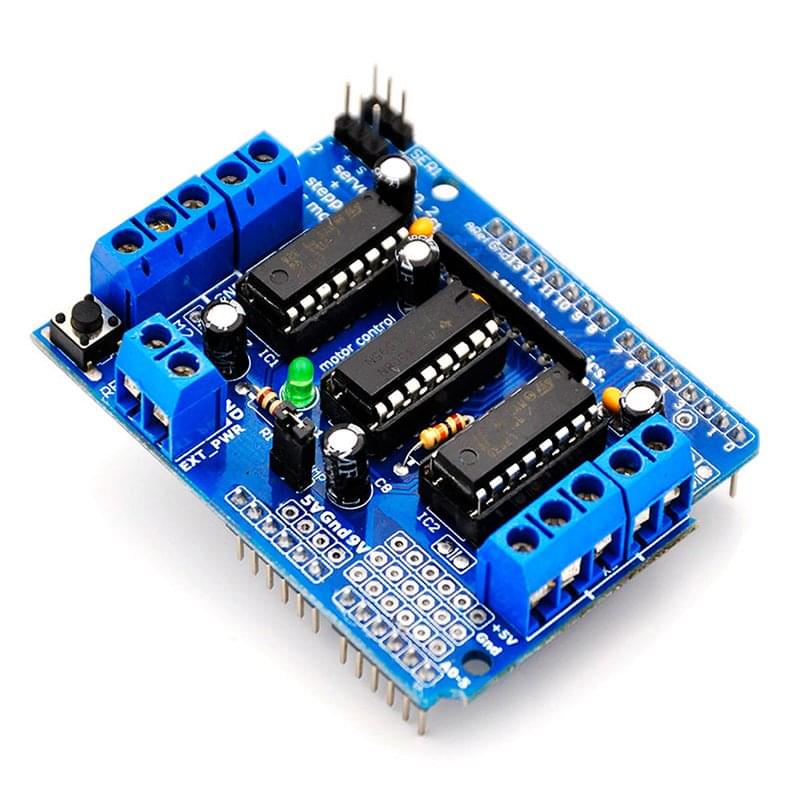 Ровно
Ровно
Доставка по Украине
35 грн
Купить
KRONS интернет- магазин
Драйвер шагового двигателя L298N, Arduino
На складе в г. Тернополь
Доставка по Украине
84 грн
Купить
Коллайдер
Модуль L298N драйвер шагового двигателя для ARDUINO
Доставка из г. Днепр
114.50 грн
Купить
Інтернет-магазин «Електроніка»
Модуль L298N драйвер шагового двигателя Arduino
Доставка по Украине
60 грн
Купить
ONLINE-BOX
Смотрите также
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
Доставка по Украине
56 грн
39 грн
Купить
AZON — супермаркет низких цен
Драйвер шагового двигателя L298N Arduino
На складе в г. Полтава
Доставка по Украине
85 грн
Купить
IT Electronics
Драйвер шагового двигателя L298N Arduino
Доставка из г. Полтава
Полтава
85 грн
Купить
РезиStore
Драйвер двигателя для Arduino 2-кан H-мост MX1508, L298N Mini
На складе в г. Ровно
Доставка по Украине
35 грн
Купить
Double-Shop
Драйвер управления двигателями на L298N для Arduino.
Доставка из г. Киев
74 грн
Купить
sk-электрон. Интернет магазин электронных изделий и компонентов.
Модуль драйвера шагового двигателя для ARDUINO L298N
Доставка по Украине
188 грн
Купить
магазин ДИМИР
Драйвер двох двигунів L298N
Доставка по Украине
70 грн
Купить
Інтернет-магазин «Перша гуртівня електрики»
Драйвер шагового двигателя L298N 2M
На складе в г. Одесса
Доставка по Украине
301 грн
Купить
Интернет-магазин DIYelectronics
Драйвер двигунів L9110S
На складе
Доставка по Украине
32 грн
Купить
Інтернет-магазин «Мікроампер»
4-канальный драйвер шагового двигателя L9110S для Arduino
На складе в г.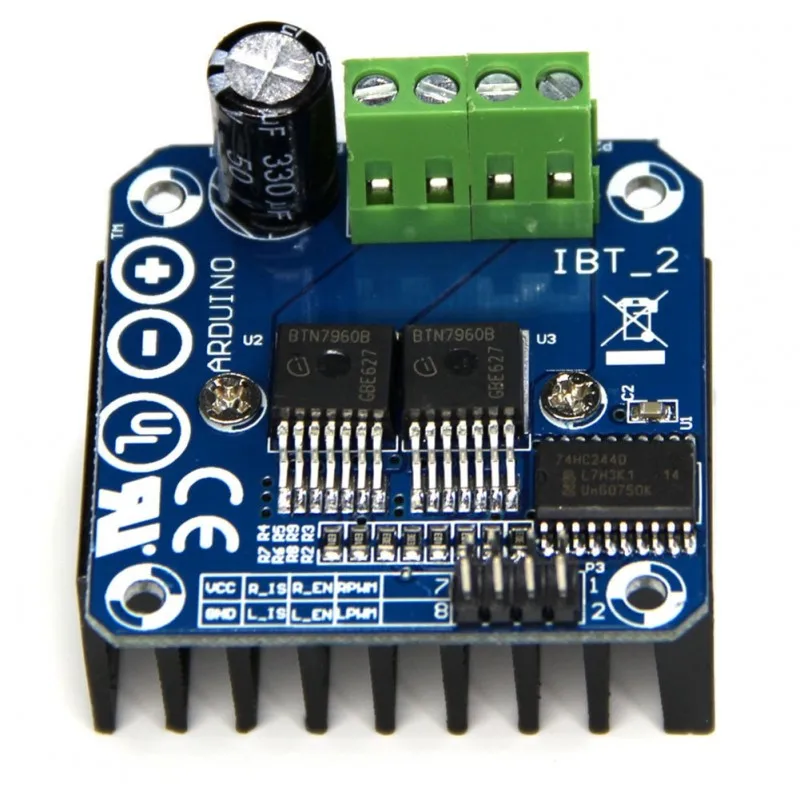 Умань
Умань
Доставка по Украине
84 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Драйвер шагового двигателя L298P
На складе в г. Одесса
Доставка по Украине
473 грн
Купить
Интернет-магазин DIYelectronics
Драйвер двигателя MX1508 (аналог L298N)
Доставка из г. Кривой Рог
28 грн
Купить
Онлайн-магазин «КласМагаз»
Драйвер двох двигунів L298N
На складе
Доставка по Украине
85 грн
Купить
Інтернет-магазин «Мікроампер»
Модуль драйвера шагового двигателя L298
На складе
Доставка по Украине
73.80 грн
Купить
Магазин «Солдер»
Pololu Dual G2 High-Power Motor Driver Shield 18v18 Shield для Arduino
Обзор
Семейство G2 двойных драйверов мощных двигателей оснащено парами дискретных Н-мостов MOSFET, предназначенных для управления двумя большими щеточными контактами постоянного тока. моторы. Они имеют форм-фактор платы Arduino, поэтому их можно подключать непосредственно к Arduino или совместимой плате, такой как A-Star 32U4 Prime, но они также выламывают все контакты драйвера двигателя вдоль левой стороны платы, чтобы включить использование в качестве драйвера двигателя общего назначения без Arduino. Доступны четыре версии, так что вы можете выбрать ту, которая соответствует диапазону рабочего напряжения и возможностям выходного тока для вашего проекта:
моторы. Они имеют форм-фактор платы Arduino, поэтому их можно подключать непосредственно к Arduino или совместимой плате, такой как A-Star 32U4 Prime, но они также выламывают все контакты драйвера двигателя вдоль левой стороны платы, чтобы включить использование в качестве драйвера двигателя общего назначения без Arduino. Доступны четыре версии, так что вы можете выбрать ту, которая соответствует диапазону рабочего напряжения и возможностям выходного тока для вашего проекта:
| Dual G2 High- Драйвер силового двигателя Экран 18v22 | Dual G2 High- Силовой привод двигателя Экран 18v18 | Dual G2 High- Драйвер силового двигателя Экран 24v18 | Dual G2 High- Драйвер силового двигателя Экран 24v14 | |
|---|---|---|---|---|
| Абсолютное максимальное входное напряжение: | 30 В | 40 В | ||
| Максимальное номинальное напряжение батареи : | 18 В | 28 В | ||
Макс.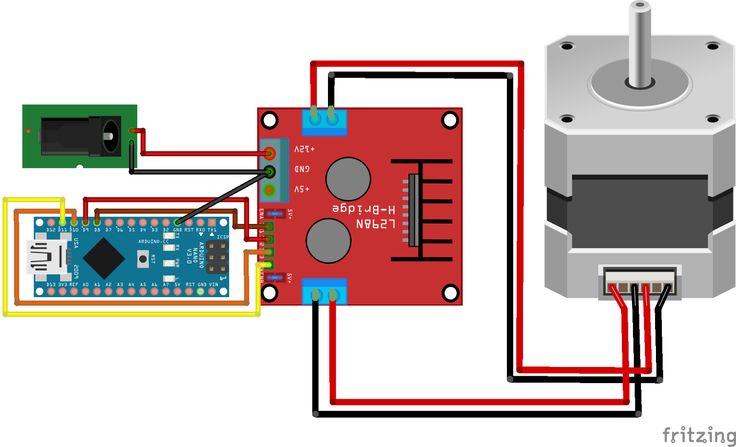 непрерывный ток непрерывный ток на канал: | 22 А | 18 А | 18 А | 14 А |
| Активный ток по умолчанию — порог ограничения : | 60 А | 50 А | 40 А | |
| Измерение тока выход: | 10 мВ/А | 20 мВ/А | ||
Минимальное рабочее напряжение для всех четырех версий составляет 6,5 В. Максимальное рабочее напряжение указано в таблице выше; они намного выше того, что может выдержать типичный Arduino, поэтому экраны включают в себя встроенный импульсный понижающий регулятор 7,5 В, 1 А, который можно дополнительно использовать для питания любой Arduino или платы, совместимой с Arduino, к которой он подключен, что позволяет работать с одного источник питания. Этот регулятор также можно настроить на выход 5 В для приложений, где это будет более полезно, чем 7,5 В по умолчанию, а сопоставления выводов Arduino можно настроить, если значения по умолчанию неудобны.
Эти драйверы с двумя двигателями также доступны в виде плат расширения Raspberry Pi. Для одноканальных версий в более компактном форм-факторе рассмотрите наши драйверы двигателей высокой мощности. В качестве менее мощной и недорогой альтернативы Arduino Shield рассмотрите Dual MC33926 Motor Driver Shield.
Детали для товара № 2515
|
|
|
- Рабочее напряжение: от 6,5 В до 30 В (абсолютный максимум; не предназначен для использования с батареями 24 В)
- Выходной ток: 18 А, непрерывный
- Выход датчика тока, пропорциональный току двигателя (прибл. 20 мВ/А; активен только при работе H-моста)
- Активное ограничение тока (прерывание) с приблизительным порогом по умолчанию 50 А (можно уменьшить)
 20 мВ/А; активен только при работе H-моста)
20 мВ/А; активен только при работе H-моста)Эту версию, 18v18 , можно отличить от других версий по синей печатной плате и номеру 150 поверх высоких серебряных электролитических конденсаторов.
Особенности, общие для всех версий
Pololu Dual G2 High Power Motor Driver Shield, управляемый A-Star 32U4 Prime. |
|---|
- Входы, совместимые с логикой 1,8 В, 3,3 В и 5 В
- Режим ШИМ до 100 кГц
- Светодиодные индикаторы двигателя показывают, что делают выходы, даже если двигатель не подключен
- Защита от обратного напряжения
- Отключение при пониженном напряжении
- Защита от короткого замыкания
- Интерфейс управления допускает работу со знаком или противофазой
- Встроенный импульсный понижающий стабилизатор напряжения 7,5 В, 1 А (вместо этого можно настроить на выход 5 В)
- Библиотека Arduino упрощает начало работы с этой платой в качестве защитного экрана драйвера двигателя
- Подробное руководство пользователя
- Сопоставление выводов Arduino можно настроить, если сопоставления по умолчанию неудобны
- При использовании в качестве экрана источник питания двигателя или выход регулятора 7,5 В можно дополнительно использовать для питания базы Arduino для работы с однополярным питанием
- Может использоваться с платой Arduino или совместимой платой (через щитовые разъемы) или другими платами микроконтроллеров (через 0,1-дюймовый разъем вдоль левой стороны)
|
|
Оборудование в комплекте
Мощный драйвер двигателя Pololu Dual G2 18v18 Shield для Arduino с включенным оборудованием. |
|---|
Для сильноточных установок провода двигателя и питания следует припаивать непосредственно к приводу (поставляемые клеммные колодки рассчитаны только на ток до 16 А). |
|---|
Эта плата драйвера двигателя поставляется со всеми установленными деталями для поверхностного монтажа. Однако для сборки входящих в комплект деталей со сквозными отверстиями требуется пайка. В комплект входят следующие сквозные детали:
- один удлиненный/штабелируемый разъем 1×10 (для плат Arduino)
- два удлиненных/штабелируемых гнездовых разъема 1×8 (для плат Arduino)
- два удлиненных/штабелируемых гнездовых разъема 1×6 (для плат Arduino)
- три 2-контактных клеммных блока 5 мм (для питания платы и выходов двигателя)
- 40-контактный прямой разъемный штекерный разъем 0,1″ (может поставляться в виде нескольких частей, например, двух 20-контактных полос)
Также в комплект входит блок короткого замыкания 0,1″ (для дополнительной подачи питания на Arduino).
Вы можете припаять клеммные колодки к шести большим сквозным отверстиям, чтобы подключить двигатель и питание двигателя, или вы можете отломить секцию 1 × 12 0,1-дюймовой контактной полосы и припаять ее к меньшим сквозным отверстиям, которые границы этих больших отверстий. Обратите внимание, однако, что клеммные колодки рассчитаны только на 16 А, а каждая пара штыревых контактов рассчитана только на суммарный ток 6 А, поэтому для приложений с большей мощностью толстые провода следует припаивать непосредственно к плате, а соответствующие высоковольтные следует использовать токовые разъемы (такие как эти).
Если эта плата не используется в качестве экрана Arduino, вы можете припаять 0,1-дюймовые разъемы к логическим соединениям вдоль левой стороны платы, чтобы можно было использовать специальные кабели или макетные платы без пайки, или вы можете припаять провода непосредственно к плате для более компактные установки. Обратите внимание, что соединения двигателя и питания двигателя не должны выполняться через макетную плату.
Драйвер двигателя включает шесть электролитических силовых конденсаторов емкостью 100 мкФ или 150 мкФ, и есть место для добавления дополнительных конденсаторов (например, для компенсации длинных проводов питания или повышения стабильности источника питания). Дополнительные силовые конденсаторы обычно не требуются, и в этот драйвер двигателя дополнительные конденсаторы не входят.
Два монтажных отверстия предназначены для использования с винтами № 4 (не входят в комплект).
Измерение и ограничение тока
Контакты датчика тока драйвера, M1CS и M2CS, выходные напряжения пропорциональны току двигателя во время работы Н-моста. Выходное напряжение составляет около 10 мВ/А для версии 18v22 и 20 мВ/А для других версий плюс небольшое смещение, которое обычно составляет около 50 мВ.
Драйвер имеет возможность ограничивать ток двигателя посредством прерывания тока: как только ток привода двигателя достигает установленного порога, драйвер переходит в режим торможения (медленное затухание) примерно на 25 мкс, прежде чем снова подать питание на двигатель.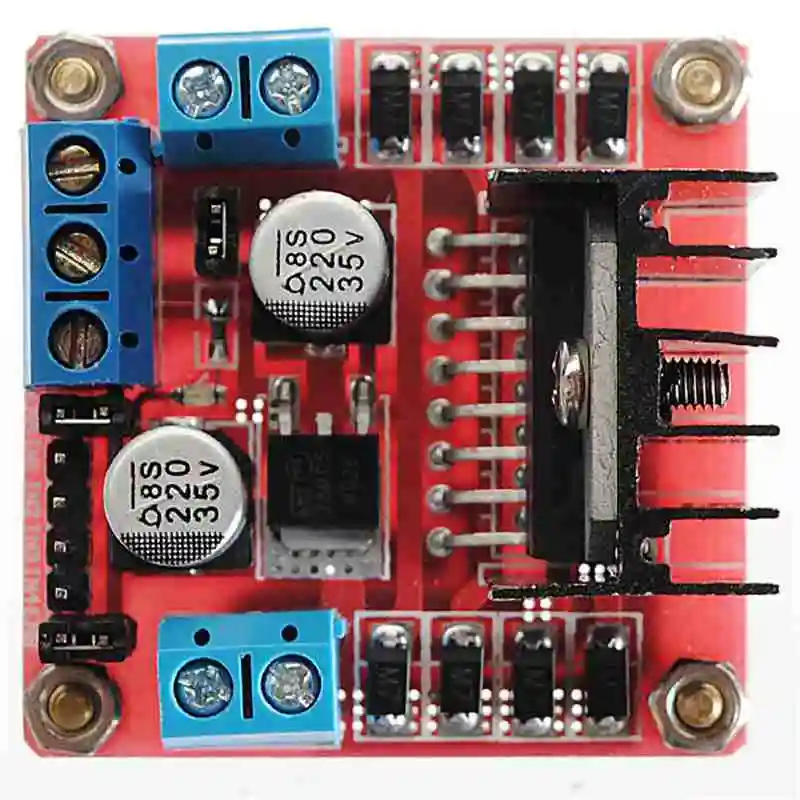 Это делает более практичным использование драйвера с двигателем, который может потреблять всего несколько ампер во время работы, но может потреблять во много раз больше (десятки ампер) при запуске. Вы можете снизить порог ограничения тока по умолчанию, подключив дополнительный резистор между контактом VREF и соседним контактом GND.
Это делает более практичным использование драйвера с двигателем, который может потреблять всего несколько ампер во время работы, но может потреблять во много раз больше (десятки ампер) при запуске. Вы можете снизить порог ограничения тока по умолчанию, подключив дополнительный резистор между контактом VREF и соседним контактом GND.
Дополнительные сведения об обратной связи по току и ограничении тока см. в руководстве пользователя.
Рассеиваемая мощность в реальных условиях
Полевые МОП-транзисторы могут выдерживать кратковременные кратковременные пики тока (например, 100 А в течение нескольких миллисекунд), а прерывание тока драйвером будет удерживать средний ток ниже установленного предела. Пиковые значения предназначены для быстрых переходных процессов (например, при первом включении двигателя), а непрерывные значения зависят от различных условий, таких как температура окружающей среды. ШИМ двигателя вносит дополнительный нагрев, пропорциональный частоте. Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или поток воздуха. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или поток воздуха. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Предупреждение: Этот привод двигателя не имеет функции отключения при перегреве. Состояние перегрева или перегрузки по току может привести к необратимому повреждению привода двигателя. Вы можете рассмотреть возможность использования либо встроенного выхода датчика тока драйвера, либо внешнего датчика тока для контроля потребляемого тока.
Этот продукт может нагреть до такой степени, чтобы гореть при нормальных условиях эксплуатации. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Версии драйверов двигателей большой мощности G2
Существует четыре версии одноканальных драйверов двигателей большой мощности G2 с совместимой разводкой выводов и восемь версий двухканальных драйверов двигателей большой мощности G2. Четыре двухканальных драйвера имеют форм-фактор платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Остальные четыре двухканальных драйвера имеют форм-фактор Raspberry Pi HAT и совместимых плат Raspberry Pi (модель B+ или новее). В следующей таблице представлено сравнение драйверов G2:
Четыре двухканальных драйвера имеют форм-фактор платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Остальные четыре двухканальных драйвера имеют форм-фактор Raspberry Pi HAT и совместимых плат Raspberry Pi (модель B+ или новее). В следующей таблице представлено сравнение драйверов G2:
| Драйверы мощных двигателей Pololu G2 | |||||
|---|---|---|---|---|---|
| Двигатель каналов | Имя | Абсолютное максимальное входное напряжение | Максимальное номинальное напряжение батареи | Макс. непрерывный ток на каналов | По умолчанию активен ограничение тока порог |
| 1 | Мощный драйвер двигателя G2 18v25 | 30 В | 18 В | 25 А | 60 А |
| Мощный драйвер двигателя G2 18v17 | 17 А | 40 А | |||
| Драйвер двигателя высокой мощности G2 24v21 | 40 В | 28 В | 21 А | 50 А | |
| Драйвер двигателя высокой мощности G2 24v13 | 13 А | 30 А | |||
| 2 | Мощный драйвер двигателя Dual G2 18v22 Shield | 30 В | 18 В | 22 А | 60 А |
| Мощный драйвер двигателя Dual G2 18v18 Shield | 18 А | 50 А | |||
| Мощный драйвер двигателя Dual G2 24v18 Shield | 40 В | 28 В | 18 А | 50 А | |
| Мощный драйвер двигателя Dual G2 24v14 Shield | 14 А | 40 А | |||
| Мощный драйвер двигателя Dual G2 18v22 для RPi | 30 В | 18 В | 22 А | 60 А | |
| Мощный драйвер двигателя Dual G2 18v18 для RPi | 18 А | 50 А | |||
| Мощный драйвер двигателя Dual G2 24v18 для RPi | 40 В | 28 В | 18 А | 50 А | |
| Мощный драйвер двигателя Dual G2 24v14 для RPi | 14 А | 40 А | |||
Мощный драйвер двигателя Pololu G2 24v21 и 24v13. |
|---|

|
|
|
|
Примечание: В качестве альтернативы этим драйверам двигателей наши простые контроллеры двигателей имеют аналогичные характеристики мощности и предлагают высокоуровневые интерфейсы (например, USB, радиоимпульсы сервопривода для хобби, аналоговые напряжения и последовательные команды TTL), которые упрощают их использование. использовать для некоторых приложений.
использовать для некоторых приложений.
Контроллер двигателя Конфигурации Raspberry Pi и Arduino
Раскрытие информации: Некоторые из ссылок ниже являются партнерскими ссылками. Это означает, что без каких-либо затрат для вас я буду получать партнерскую комиссию, если вы перейдете по ссылке и совершите покупку. Learn Robotics является участником партнерской программы Amazon Services LLC, партнерской рекламной программы, предназначенной для предоставления веб-сайтам возможности получать доход от рекламы за счет рекламы и ссылок на Amazon.com.
Если вы чем-то похожи на меня, значит, вам нравится собирать мобильных роботов. Я уверен, вы знаете, что мобильные роботы состоят из 5 частей: шасси, двигателей, контроллеров, датчиков и источника питания. Чтобы охватить три из этих групп, вам необходимо правильно подключить двигатели к контроллерам (двигатель и главный), а затем добавить источник питания.
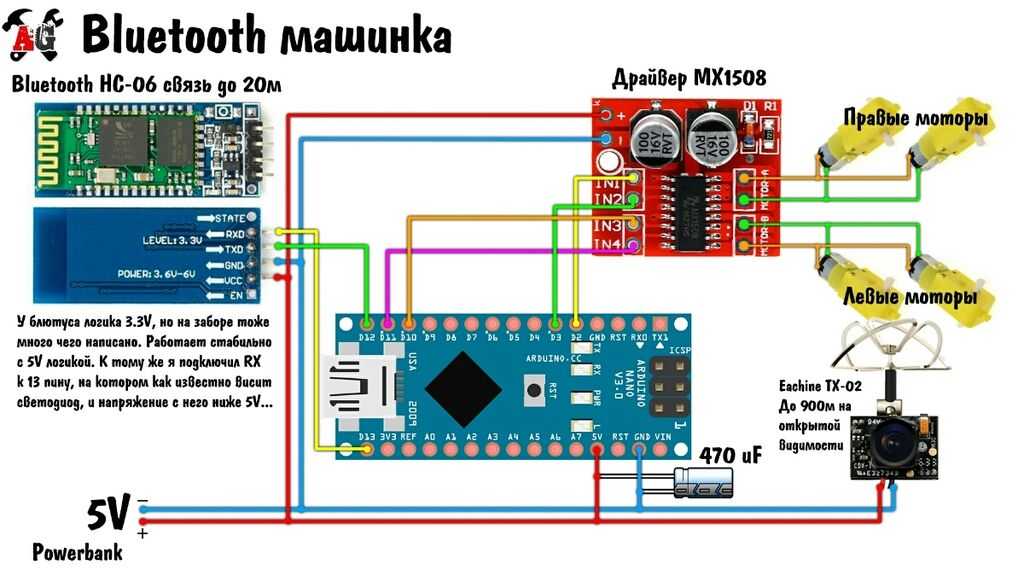
Контроллер мотора легко подключить, но его питание для мобильных приложений может оказаться сложной задачей. В этих примерах показаны схемы подключения пары двигателей постоянного тока 3–6 В, питаемых от аккумуляторной батареи 7,4 В (2 батареи 18650). Выберите контроллеры из списка и используйте электрические схемы для завершения проекта. Для удобства вы также можете добавить эту страницу в закладки и посетить ее в следующий раз, когда будете создавать мобильного робота.
В этих примерах показаны схемы подключения пары двигателей постоянного тока 3–6 В, питаемых от аккумуляторной батареи 7,4 В (2 батареи 18650). Выберите контроллеры из списка и используйте электрические схемы для завершения проекта. Для удобства вы также можете добавить эту страницу в закладки и посетить ее в следующий раз, когда будете создавать мобильного робота.
В этой статье я собрал самые популярные или распространенные конфигурации для подключения контроллеров моторов L298N (техническое описание) и L293D (техническое описание) для Raspberry Pi и Arduino (Uno, Nano, NodeMCU). Я составил это руководство, чтобы хранить все ресурсы и электрические схемы в одном месте.
Для удобства навигации вы можете щелкнуть ссылки ниже, чтобы найти электрическую схему на этой странице.
Схемы контроллера двигателя Raspberry Pi
Напоминаем, что Raspberry Pi использует номера Broadcom и Physical pin для контактов GPIO. Контакты Broadcom — это ссылка GPIOXX, а физические контакты — это номера, соответствующие физическому расположению каждого контакта в заголовке. Мы будем ссылаться на контакты Broadcom GPIOXX на схемах подключения ниже. Итак, с учетом сказанного, вот коллекция популярных схем подключения контроллера двигателя Raspberry Pi.
Мы будем ссылаться на контакты Broadcom GPIOXX на схемах подключения ниже. Итак, с учетом сказанного, вот коллекция популярных схем подключения контроллера двигателя Raspberry Pi.
Нажмите для распиновки Raspberry Pi Zero W
L298N Схема подключения Raspberry Pi
Для этого приложения вы подключите сигнальные контакты L298N следующим образом: GPIO17
L298N IN3 — GPIO27
L298N IN4 — GPIO22
L298N ENB — GPIO12
Вы будете питать свой Raspberry Pi с помощью аккумуляторной батареи 5 В 2 А.
Схема подключения L293D Raspberry Pi
L29Аналогично подключается 3D. Вам понадобится макетная плата для подключения L293D. Вот сигнальные контакты между контроллерами.
L293D Enable 1 to GPIO18
L293D IN1 to GPIO4
L293D IN2 to GPIO17
L293D IN3 to GPIO27
L293D IN4 to GPIO22
L293D Enable 2 to GPIO12
You can power your Raspberry Pi using a 5V 2A battery pack.
Adafruit TB6612 с Raspberry Pi
Наконец, вы можете использовать TB6612 с Raspberry Pi, если хотите использовать внешний источник питания двигателя постоянного тока.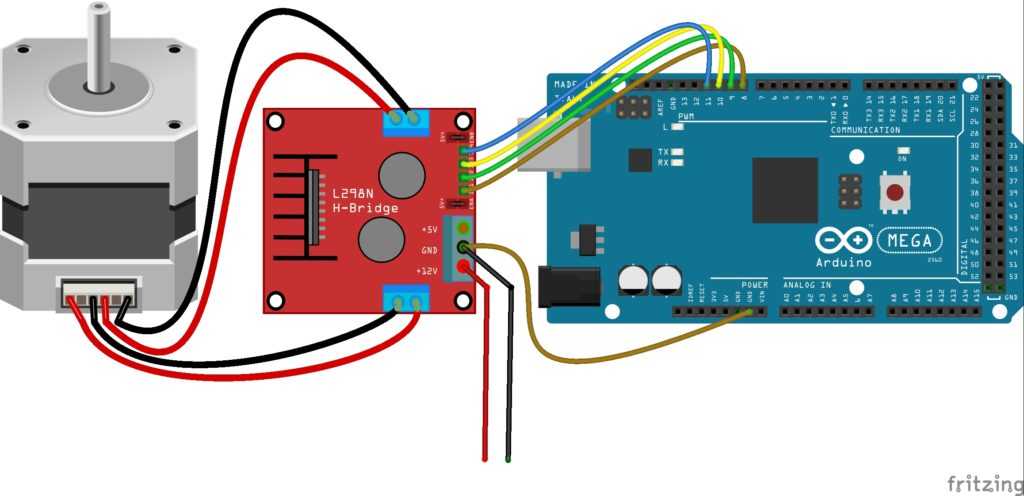 Вот как это подключено:
Вот как это подключено:
TB6612 AIN1 — GPIO18
TB6612 PWMA для GPIO4
TB6612 AIN2 до GPIO17
TB6612 STBY для GPIO27
TB6612 PWMB для GPIO22
TB6612 BIN23 BIN23 BIN11111111111111111111111111111111111111111111111111111111111111111110111111011110111101111Р1Р1н. Схемы контроллера двигателя для вашего проекта. Я собрал чертежи для Arduino Uno, Nano и NodeMCU.
Схемы подключения контроллера двигателя Arduino
Если вы предпочитаете использовать Arduino, вы можете ознакомиться с этим набором общих схем подключения контроллера двигателя Arduino. Чтобы узнать, как построить мобильного робота с помощью Arduino, ознакомьтесь с этим популярным руководством. Вы также можете принять участие в нашем электронном курсе по робототехнике, чтобы узнать больше о мобильных роботах, программировании, электронике и поучаствовать в автономных задачах. Запишитесь на курс здесь.
Схема подключения Arduino Uno L298N
L298N — довольно распространенный контроллер, используемый с Arduino Uno.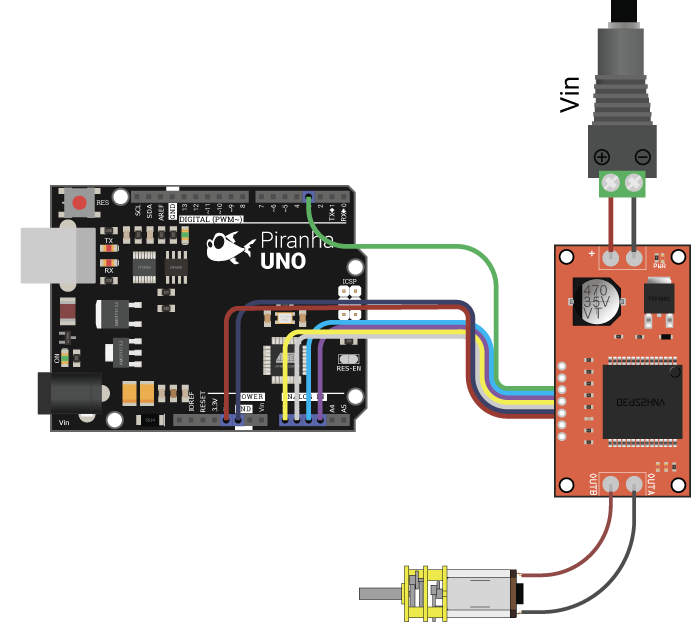 Подключите сигнальные контакты следующим образом:
Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 5
L298N IN1 к цифровому 2
L298N IN2 к цифровому 3
L298N IN3 к цифровому 4
L298N IN4 к цифровому 7
L298N ENB к цифровому 6
900 питайте L298N от аккумуляторной батареи 7,4 В. Обязательно разделите землю между Arduino, L298N и аккумулятором. Контакт 12V на L298N подключается к шине Vcc на макетной плате. Наконец, подключите 5 В от Arduino к шине Vcc на макетной плате и к контакту 5 В на L298N. Вам не нужно запитывать Arduino с помощью USB-кабеля после того, как ваш блок питания подключен.
Готовы сделать своего робота автономнее? Из этого руководства вы узнаете, как запрограммировать контроллер мотора L298N с помощью Arduino.
Схема подключения Arduino Uno L293D
Вот схема подключения L293D для Arduino Uno. Сигнальные контакты подключаются следующим образом:
L293D Активация 1 к цифровому 5
L293D IN1 к цифровому 2
L293D IN2 к цифровому 3
L293D IN3 к цифровому 4
L293D IN4 к цифровому 7
L293D Активация 2 к цифровому 6 , за которым следует питание между Arduino, контроллером мотора и аккумулятором.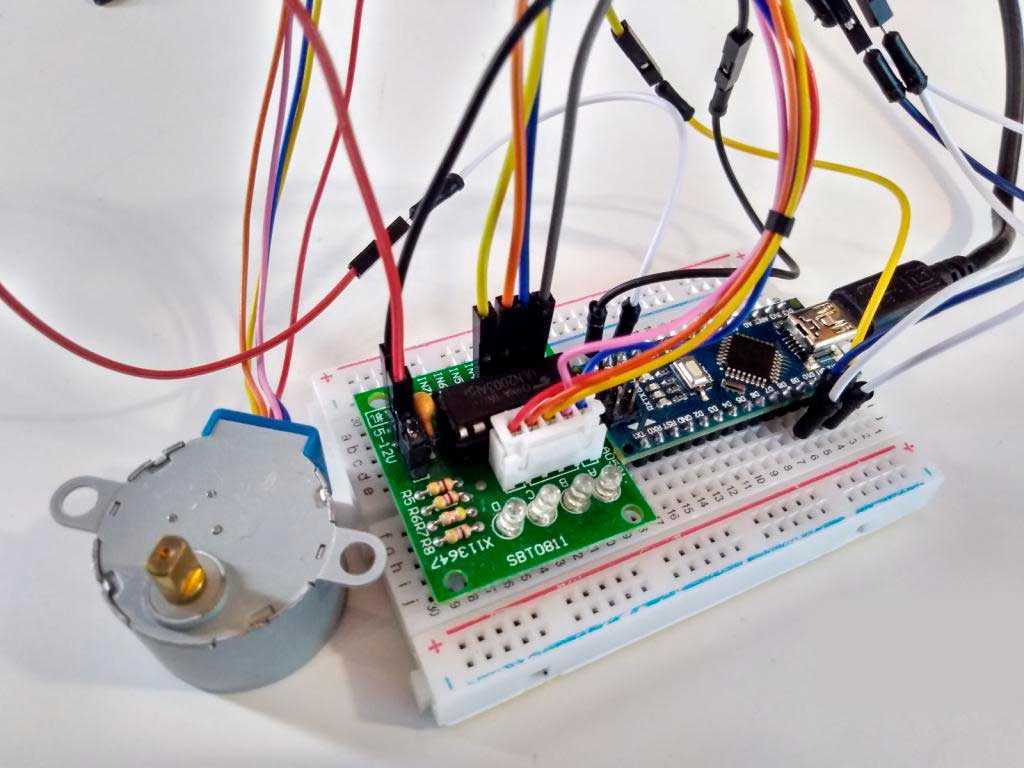
Схема подключения Arduino Nano L298N
Создайте робота Arduino меньшего размера, используя Arduino Nano и контроллер двигателя L298N. Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 3
L298N IN1 к цифровому 2
L298N IN2 к цифровому 4
L298N IN3 к цифровому 6
L298N IN4 к цифровому 7
L298N ENB к цифровому 5
L298N. Затем подключите провода питания и заземления к макетной плате. Обязательно подключите питание и заземление к нано, контроллеру мотора и аккумулятору.
Схема подключения Arduino Nano L293D
Вот как подключить Arduino Nano к L293D контроллер двигателя. Подключите сигнальные контакты следующим образом. Затем соедините кабели питания, заземления и двигателя, используя схему ниже.
L293D Включение с 1 до 3
L293D In1 до 2
L293D In2 до 4
L293D In3 до 6
L293D In4 до 7
L293D Enable 2-5
3 Nodemcu L298D с 2 до 5
3 Nodemcu L298D с 2 до 5
3 Nodemcu L298D с 2 до 5
3 Nodemcu L298D с 2 до 5
3. (L7805 — 5 В 1,5 А), электролитический конденсатор (1 мкФ/50 В) и керамический конденсатор (100 нФ — 0603). Сигнальные контакты между NodeMCU и L298N are given as follows:
(L7805 — 5 В 1,5 А), электролитический конденсатор (1 мкФ/50 В) и керамический конденсатор (100 нФ — 0603). Сигнальные контакты между NodeMCU и L298N are given as follows:
L298N ENA to D2
L298N IN1 to D1
L298N IN2 to D3
L298N IN3 to D4
L298N IN4 to D6
L298N ENB to D5
NodeMCU L293D Wiring Diagram
You can also используйте L293D с вашим NodeMCU. Вот как подключить сигнальные контакты:
L293D Enable 1 к D2
L293D IN1 к D1
L293D IN2 к D3
L293D IN3 к D4
L293D IN4 к D6
L293D Enable 2 к D5
0 Наконец,
хотите проверить свою проводку и не отключать питание контроллера во время загрузки кода. Хорошей практикой является добавление выключателя питания для отключения аккумуляторной батареи, чтобы упростить проводку. Самое классное в этих конфигурациях то, что как только вы попробуете несколько из них, вы сможете сделать мобильного робота практически из чего угодно! Некоторые проекты включают Tiny Robot Cars, Robotic Tanks, Robot Cars и многое другое.