Схемы управления асинхронными электродвигателями | Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Подробности
- Категория: Разное-архив
- РЗиА
- потребитель
- оборудование
- низковольтное
- подстанции
- среднее напряжение
Содержание материала
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Газоразрядные лампы
- Установки для электрического освещения
- Облучение растений в теплицах
- Применение осветительных установок на птицефермах
- Установки ультрафиолетового облучения
- Установки инфракрасного нагрева
- Электротехнологические установки
- Установки электронно-ионной технологии
- Ультразвуковая техника
- Установки для магнитной обработки материалов
- Устройства для обработки сред электрическим током
- Электропривод и его основные части
- Характеристики и режимы работы электродвигателей
- Регулирование скорости в электроприводах
- Выбор электродвигателей
- Аппаратура управления электродвигателями
- Рубильники и переключатели
- Путевые выключатели
- Контакторы и электромагнитные пускатели
- Реле управления
- Тиристорные пускатели
- Логические элементы
- Плавкие предохранители
- Автоматические выключатели
- Тепловые реле и температурная зашита
- Автоматическое управление электроприводами
- Принципы управления двигателями постоянного тока
- Схемы управления асинхронными электродвигателями
- Блокировочные связи и сигнализация в схемах управления электроприводами
- Следящий привод, применение магнитных и тиристорных усилителей
- Дистанционное управление электроприводами
- Электропривод ручных инструментов и стригальных машинок
- Управление электроприводами поточных линий
- Электропривод поточных линий приготовления кормов
- Управление поточными линиями кормораздачи
- Управление электроприводами комплекса машин по удалению навоза и помета
- Эффективность и перспективы электрификации тепловых процессов, способы нагрева
- Способы охлаждения и типы холодильных машин
- Электродуговые нагреватели
- Индукционные и диэлектрические нагреватели
- Автоматизация электронагревательных установок
- Выбор и настройка автоматических регуляторов электронагревательных установок
- Электрические водонагреватели и котлы
- Электродные водогрейные и паровые котлы
- Электрооборудование и автоматизация электрокотельных, электрокалориферные установки
- Электрообогреваемые полы
- Средства местного электрообогрева
- Электрические инкубаторы
- Электрический обогрев парников и теплиц
- Установки для электротепловой обработки продуктов и кормов
- Электротерморадиационная и высокочастотная сушка
- Электротепловая обработка пищевых продуктов и кормов
- Электротермические печи
- Электросварочное оборудование
- Высокочастотные установки
- Низкотемпературные установки
- Холодильные производственные установки
- Электрооборудование и автоматизация плодо- и овощехранилищ
Страница 29 из 59
Управление двигателями с короткозамкнутым ротором.
Асинхронные электродвигатели с короткозамкнутым ротором, как правило, управляются при помощи магнитных пускателей. Пуск электродвигателей осуществляется непосредственным включением на полное напряжение.
Простейшая схема управления двигателем с нереверсивным магнитным пускателем показана на рисунке 13.1. В этой схеме предусматривается питание силовых цепей и цепей управления от одного источника напряжения.
При включении автомата F напряжение подается на силовые и вспомогательные цепи схемы. Нажатием кнопки S2 замыкается цепь катушки магнитного пускателя К, при этом главные контакты К замыкаются и включают двигатель в сеть. Одновременно блок-контакт К шунтирует кнопку S2 и дальнейшее удержание кнопки в нажатом состоянии становится ненужным.
Отключение двигателя от сети выполняется нажатием кнопки S1. Цепь питания катушки К разрывается, что приводит к размыканию всех контактов магнитного пускателя.
В схеме предусмотрена защита электродвигателя от коротких замыканий и перегрузки при помощи автоматического выключателя, который для этой цели содержит комбинированный расцепитель.
Схема магнитного пускателя с кнопочными выключателями осуществляет также защиту от самопроизвольных включений электродвигателя (нулевая защита) при восстановлении напряжения питания после кратковременного его исчезновения. Повторный пуск электродвигателя возможен только после вторичного нажатия кнопки S2. В тех случаях, когда необходимо изменять направление вращения, управляют электродвигателем реверсивным магнитным пускателем, схема которого показана на рисунке 13.7.
При нажатии кнопки S1 получает питание катушка К1 магнитного пускателя, замыкаются силовые контакты в главной цепи и статор двигателя присоединяется к сети при прямом чередовании фаз.
При нажатии кнопки S2 ее размыкающий контакт, установленный в цепи катушки К1, размыкается, благодаря чему реверс электродвигателя может быть произведен без предварительного нажатия кнопки S3. Чередование фаз при этом меняется на обратное.
Для торможения асинхронных короткозамкнутых электродвигателей применяется электродинамическое торможение и торможение противовключением.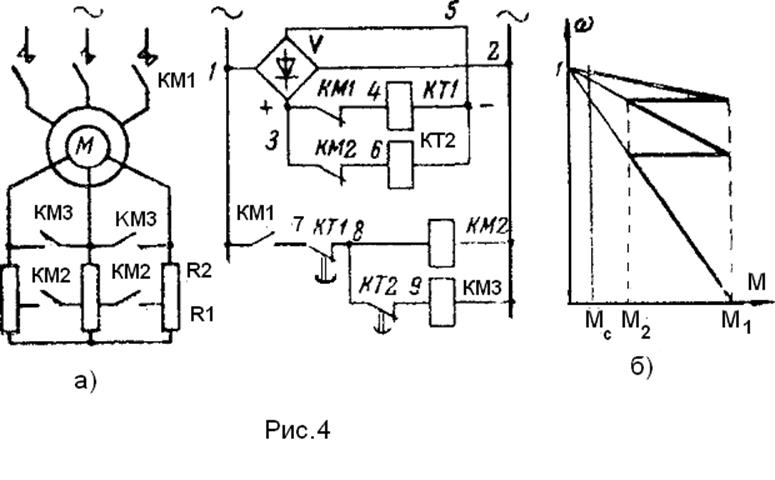
Электродинамическое торможение осуществляется путем отключения обмоток статора электродвигателя от сети переменного тока и подачей в них постоянного тока на период торможения.
Торможением противовключением осуществляется при помощи реверсивного магнитного пускателя и реле контроля скорости.
Реле состоит из постоянного магнита, вращающегося вокруг оси и соединенного с валом двигателя. Постоянный магнит помещен в цилиндр, представляющий собой устройство в виде беличьей клетки. Цилиндр укреплен на подшипниках и может поворачивайся на определенный угол до упора, при этом переключаются контакты контактного мостика. При вращении постоянного магнита его поле пересекают проводники цилиндра, индуктируя в них электрический ток. Взаимодействие индуктированного тока и вращающегося магнитного потока приводит к перемещению цилиндра и переключению контактного мостика. На рисунке 13.8 показана схема торможения методом, противовключения.
При нажатии одной из кнопок S1 или S2 замыкаются соответственно цепи катушек контакторов и статор электродвигателя подключается к сети, ротор начинает вращаться. Одновременно с началом вращения приводится в действие вал реле контроля скорости и срабатывают соответствующие контакты Е1 или Е2, которые подготавливают цепи катушек контакторов К1 или К2 к работе.
Одновременно с началом вращения приводится в действие вал реле контроля скорости и срабатывают соответствующие контакты Е1 или Е2, которые подготавливают цепи катушек контакторов К1 или К2 к работе.
Рис. 13.8 Схема торможения асинхронного электродвигателя методом противовключения.
При остановке двигателя кнопкой S3 разрывается цепь ранее возбужденной катушки, отпадают контакты контакторов К1 или К2, а блок-контактом замыкаются цепи катушки контактора К1 в том случае, если электродвигатель работал в режиме «вперед», и наоборот. Таким образом, привод осуществляет реверс, однако двигатель продолжает вращаться в прежнем направлении, работая в тормозном режиме противовключения.
Рис. 13.9. Схема автоматического управления асинхронным электродвигателем с фазным ротором.
Частота вращения ротора уменьшается, и как только частота вращения станет близкой к нулю, контакты реле контроля скорости разомкнут цепи катушек контакторов К1 или К2 и отключат статор двигателя от сети.
Управление двигателями с фазным ротором. Пуск, торможение и регулирование частоты вращения электродвигателей с фазным ротором сопряжены с изменением сопротивлений, включенных в роторную цепь. Сопротивления должны изменяться в определенной последовательности.
На рисунке 13.9 показана схема автоматического управления двигателем с фазным ротором при помощи командоконтроллера, резисторы могут быть использованы как пусковые и регулировочные.
Для подготовки к пуску двигателя рукоятку командоконтроплера устанавливают в нулевое положение. При этом получают питание реле напряжения К.1, которое, сработав, зашунтирует контакт контроллера, замыкающийся только в нулевом положении. В положении 1 режима «Вперед» оказывается под напряжением катушка контактора К2, который срабатывает и своими главными контактами подключает статор двигателя к сети при введенных полностью ступенях реостата. Одновременно срабатывает реле К4, которое посредством своего замыкающего контакта замкнет цепь контактора противовключения К5, а последний своими главными контактами выключит резисторы противовключения в роторе и подготовит цепь для питания катушки первого контактора ускорения Кб. Таким образом, в положении 1 командоконтроллера двигатель работает на пониженной скорости при введенном в цепь ротора пусковом сопротивлении.
Таким образом, в положении 1 командоконтроллера двигатель работает на пониженной скорости при введенном в цепь ротора пусковом сопротивлении.
Для увеличения частоты вращения двигателя рукоятку командоконтроллера переводят в положение 2 «Вперед». Тогда выключится контактор Кб, шунтирующий первую ступень пускового резистора и с выдержкой времени подготавливающий цепь для питания контактора К7. При постановке рукоятки в следующие положения включаются последовательно контакторы К7 и К8, шунтирующие остальные ступени пускового реостата.
Реле времени, встроенные в контакторы К5, Кб, К7, обеспечивают минимальное время переключения пусковых сопротивлений, а увеличение времени пуска может быть достигнуто вручную медленным передвижением рукоятки контроллера. Аналогичным образом работает схема при перемещении рукоятки контроллера из нулевого положения в положения 1, 2, 3, 4 «Назад», только при этом будет включен контактор К3. Если оператор мгновенно переведет рукоятку из положения 4 «Вперед» в положение 4 «Назад», то вначале последовательно отключатся контакторы К8, К7, Кб, К5 ив цепь ротора будут введены все ступени реостата. Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты.
Затем отключается контактор К.2 и после этого включится контактор КЗ. Так как рукоятка переведена мгновенно, скорость двигателя еще не успела упасть. Таким образом, статор двигателя, ротор которого вращается вперед, будет включен для работы назад, то есть двигатель будет переведен в режим противовключения. Так как ток противовключения превосходит пусковой ток, то реле К9 возбудившись, разомкнет свои контакты в цепи катушки контактора К5 и будет их держать раскрытыми до тех пор, пока ток в цепи ротора не станет равным пусковому. Это произойдет в момент, когда ротор двигателя остановится. Контактор К5, возбудившись, зашунтирует ступень противовключения реостата. Выключение остальных ступеней будет происходить с выдержками времени контакторов К5, Кб и К7 так же, как было при обычном пуске. Блокировочное реле К4 не позволяет в момент реверсирования включаться контактору К5. Пока реле К4 сработает, реле К9 успевает разомкнуть свои контакты.
Для остановки двигателя рукоятку командоконтроллера необходимо поставить в нулевое положение.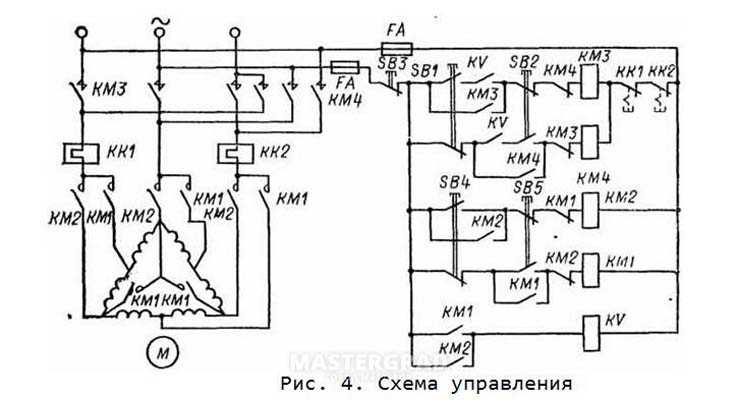 Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.
Наличие реле К1 препятствует повторному пуску двигателя, если рукоятка командоконтроллера не поставлена в нулевое положение.
- Назад
- Вперёд
- Назад
- Вперёд
- Вы здесь:
- Главная
- Архив
- Разное архив
- Электрооборудование и электроснабжение горных предприятий
Еще по теме:
- Защита сельских сетей от кз
- Электрические аппараты и оборудование выше 1000В
- Электрификация сельскохозяйственного производства
- В помощь сельскому электромонтеру
- Электромонтер строительной площадки
Составление схемы управления электропривода
|
КАТЕГОРИИ: Археология
ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрации Техника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы.
|
⇐ ПредыдущаяСтр 6 из 6 Управление приводами включает в себя пуск электродвигателя в работу, регулирование скорости вращения, изменение направления вращения, торможение и останов электродвигателя. Для управления приводами применяются электрические коммутационные аппараты, такие как автоматические и неавтоматические выключатели, контакторы и магнитные пускатели. Для защиты электродвигателей от ненормальных режимов (перегрузок и коротких замыканий) применяются автоматические выключатели, предохранители и тепловые реле.
Схема управления асинхронным электродвигателем с короткозамкнутым роторомУправление электродвигателями с короткозамкнутым ротором. На рис. 2.8 приведена схема управления асинхронным двигателем с короткозамкнутым ротором с помощью магнитного пускателя. Рис. 2.8. Схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью магнитного пускателя: Q – выключатель; F – предохранитель; КМ – магнитный пускатель, КК1, КК2 – тепловое реле; SBC – кнопочный выключатель включения двигателя; SBT – кнопочный выключатель отключения двигателя
Магнитные пускатели широко применяются для двигателей мощностью до 100 кВт. Простейшая схема управления электродвигателем может иметь только неавтоматический выключательQи предохранителиF или автоматический выключатель. Во многих случаях при управлении электроприводом необходимо изменять направление вращения электродвигателя. Для этого применяются реверсивные магнитные пускатели. На рис. 2.9 приведена схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью реверсивного магнитного пускателя. Для включения электродвигателя М должен быть включен выключатель Q. Включение электродвигателя для одного направления, условно «Вперед», производится нажатием кнопочного выключателя SBС1в цепи питания катушки КМ1 магнитного пускателя.При этом катушка (электромагнит включения) магнитного пускателя КМ1 получает питание от сети и замыкает контакты КМ1 в главной цепи и в цепи управления.
Схема управления асинхронным электродвигателем с короткозамкнутым ротором Рис. 2.9. Схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью реверсивного магнитного пускателя: Q – выключатель; F – предохранитель; КМ1, КМ2 – магнитный пускатель, КК1, КК2 – тепловое реле; SBC1, SBC2 – кнопочный выключатель включения двигателя; SBT – кнопочный выключатель отключения двигателя Для пуска электродвигателя в противоположном направлении, условно «Назад», необходимо нажать кнопочный выключатель SBС2. Кнопочные выключатели SBС1и SBС2 имеют электрическую блокировку, исключающую возможность одновременного включения катушек КМ1 и КМ2. Для этого в цепь катушки КМ1 включается вспомогательный контакт пускателя КМ2, а в цепь катушки КМ2 – вспомогательный контакт КМ1. Для отключения электродвигателя от сети при его вращении в любом направлении необходимо нажать на кнопочный выключатель SBТ. При этом цепь любой катушки и КМ1 и КМ2 разрывается, их контакты в главной цепи электродвигателя размыкаются, и электродвигатель останавливается. Схема реверсивного включения может в обоснованных случаях применяться для торможения двигателя противовключением. Управление электродвигателями с фазным ротором. На рис. 2.10 приведена схема управления асинхронным двигателем с фазным ротором.
Схема управления асинхронным двигателемс фазным ротором Рис. 2.10. Схема управления асинхронным двигателем с фазным ротором: QF – выключатель; КМ – магнитный пускатель в цепи статора, КМ1 – КМ3 – магнитный пускатель ускорения; SBC – кнопочный выключатель включения двигателя;R – пусковой реостат; SBT – кнопочный выключатель отключения двигателя
Механические характеристики асинхронного двигателя с фазным ротором<br /> В приведенной схеме защита двигателя М от коротких замыканий и перегрузок осуществляется автоматическим выключателем QF. Рис. 2.11. Механические характеристики асинхронного двигателя с фазным ротором: 1, 2, 3 – при включении ступеней пускового реостата; 4 – естественная; П – точка пуска; Контакт реле времени КМ в цепи катушки контактора КМ1 с выдержкой времени t1 (рис. 2.12) включает контактор КМ1, который замыкает контакты первой ступени в цепи пускового реостата. Изменение тока статора и частоты вращения ротора асинхронного двигателя с фазным ротором во время пускаРис. 2.12. Изменение тока статора и частоты вращения ротора асинхронного двигателя с фазным ротором во время пуска На естественной характеристике ток статора и частота вращения ротора достигают номинальных значений. Остановка электродвигателя осуществляется кнопочным выключателем SBT. Электрическая блокировка в приводах. В многодвигательных приводах или приводах механизмов, связанных общей технологической зависимостью, должна быть обеспечена определенная очередность включения и отключения электродвигателей. Это достигается применением механической или электрической блокировки. Электрическая блокировка осуществляется путем применения дополнительных вспомогательных контактов коммутационных аппаратов, участвующих в управлении приводами. Схема блокировки последовательности управления двух электродвигателей
Рис. 2.13. Схема блокировки последовательности управления двух электродвигателей: Q1, Q2 – выключатель; F1, F2 – предохранитель; КМ1, КМ2 – магнитный пускатель, КК1, КК2 – тепловое реле; SBC1, SBC2 – кнопочный выключатель включения двигателя;SBT1, SBT2 – кнопочный выключатель отключения двигателя; Q3 – вспомогательный выключатель
В схеме исключена возможность пуска электродвигателя М2 раньше пуска двигателя М1. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. В случае остановки электродвигателя М1 этот же контакт произведет автоматическое отключение двигателя М2. При необходимости самостоятельного пуска электродвигателя при опробовании механизма в цепи управления имеется выключатель Q3, который необходимо предварительно замкнуть. Регулирование скорости рабочего органа машины или механизма. Скорость рабочего органа машины можно изменить за счет применения редукторов или путем изменения частоты вращения электродвигателя. Частоту вращения электродвигателя можно изменить несколькими способами. В строительных машинах и механизмах применяют редукторы с зубчатой, ременной и цепной передачами, позволяющими изменять передаточное число. В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов. Для этих целей применяют либо электродвигатель с двумя обмотками статора, каждая из которых имеет разное количество пар полюсов, либо электродвигатель с переключением секций фазных обмоток статора. Возможно регулирование частоты вращения изменением напряжения на обмотке статора.
Требования техники безопасности при выполнении работы Работнику запрещается: — производить самостоятельное вскрытие и ремонт электрооборудования, бытовых приборов, компьютеров и копировально-множительной техники; — работать на компьютере при снятых защитных кожухах или при закрытых вентиляционных отверстиях кожуха; — прикасаться к задней панели компьютеров, копировально-множительной техники, другого оборудования и приборов при включенном питании; — переключать разъемы кабелей компьютеров, копировально-множительной техники, другого оборудования и приборов при включенном питании; — отключать оборудование от электросети выдергиванием электровилки, держась за шнур; — пользоваться неисправными выключателями, розетками, компьютерами, копировально-множительной техникой, другим оборудованием и приборами; — подключать к одному источнику тока более двух потребителей тока или хотя бы один потребитель, мощность потребления тока которого, превышает мощность источника тока. — подключать аппарат в сеть при включенном выключателе, при этом к одной розетке должен быть подключён только один аппарат; — дотрагиваться до кабеля питания мокрыми руками, ставить на него тяжёлые предметы; — устанавливать на аппарат ёмкости с жидкостью, тяжёлые предметы, мелкие металлические предметы (скрепки, кнопки и т.п.). Попадание внутрь влаги и металлических предметов может вызвать замыкание и пожар; — подвергать аппарат ударам и другим механическим воздействиям; — работать при закрытых вентиляционных отверстиях аппарата; — запрещается курение в помещениях, коридорах и лестничных переходах МОУ ФК. Курить разрешается только в специально отведенных для этой цели местах. Начиная с третьего часа работы, проводить через каждые 50 минут десятиминутные регламентированные перерывы. Продолжительность непрерывной работы с компьютером не должна быть более 2-х часов. Через каждые 20 минут работы с компьютером необходимо отводить взгляд от экрана монитора и выполнять расслабляющие упражнения для глаз. Во время перерывов, с целью снижения нервно — эмоционального напряжения, утомления зрительного анализатора, устранения влияния гиподинамии и утомления, выполнять комплексы физических упражнений. III. Требования безопасности в аварийных ситуациях: Во всех случаях прекращения работы оборудования, обрыва проводов питания, неисправности заземления, искрении, появления характерного запаха гари, немедленно отключить питание и сообщить об аварийной ситуации начальнику отдела или его заместителю. Не приступать к работе до устранения неисправности. Не пытаться самостоятельно выяснять и устранять причину, помните, что напряжение может неожиданно появиться. В случае короткого замыкания и загорании оборудования, немедленно отключить питание и действовать по инструкции о мерах пожарной безопасности, принять меры к тушению очага возгорания при помощи углекислотного огнетушителя (Инструктирующему необходимо показать его местонахождение). Сотрудник должен уметь пользоваться средствами пожаротушения.
Заключение В ходе прохождения производственной практики (по профилю специальности) в АО «Ульяновский моторный завод» были выполнены работы: — регулирование провалов и растворов контактов реле и контакторов; — проверка правильности срабатывания автоматического выключателя; — проверка работы электродвигателя в режиме реверса; — регулирование аппаратов управления электроприводом; — наладка и проверка работы электропривода; — составление схемы управления электропривода. В результате практики получен практический опыт выполнения работ по технической эксплуатации, обслуживанию и ремонту электрических машин и аппаратов; использования основных измерительных приборов для контроля за работой электрических машин и аппаратов. Цели и задачи практики достигнуты, программа практики выполнена в полном объеме.
⇐ Предыдущая123456 Читайте также: Формы дистанционного обучения Передача мяча двумя руками снизу Значение правильной осанки для жизнедеятельности человека Основные ошибки при выполнении передач мяча на месте |
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 546; Нарушение авторского права страницы; Мы поможем в написании вашей работы!
infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав.
|

 Определение реакций опор и моментов защемления
Определение реакций опор и моментов защемления
 Они применяются в продолжительном иповторнократковременном режиме работы привода. Магнитный пускатель позволяет осуществлять дистанционный пуск. Для включения электродвигателя М первым включается выключатель Q. Пуск двигателя в работу осуществляется включением кнопочного выключателя SBС. Катушка (электромагнит включения) магнитного пускателя КМ получает питание от сети и замыкает контакты КМ в главной цепи и в цепи управления. Вспомогательный контакт КМ в цепи управления шунтирует кнопочный выключатель SBС и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя. Для защиты электродвигателя от перегрузки в магнитном пускателе имеются тепловые реле КК1 и КК2, включаемые в две фазы электродвигателя. Вспомогательные контакты этих реле включаются в цепь питания катушки КМ магнитного пускателя. Для защиты от коротких замыканий в каждой фазе главной цепи электродвигателя устанавливаются предохранители F. Предохранители могут устанавливаться и в цепи управления.
Они применяются в продолжительном иповторнократковременном режиме работы привода. Магнитный пускатель позволяет осуществлять дистанционный пуск. Для включения электродвигателя М первым включается выключатель Q. Пуск двигателя в работу осуществляется включением кнопочного выключателя SBС. Катушка (электромагнит включения) магнитного пускателя КМ получает питание от сети и замыкает контакты КМ в главной цепи и в цепи управления. Вспомогательный контакт КМ в цепи управления шунтирует кнопочный выключатель SBС и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя. Для защиты электродвигателя от перегрузки в магнитном пускателе имеются тепловые реле КК1 и КК2, включаемые в две фазы электродвигателя. Вспомогательные контакты этих реле включаются в цепь питания катушки КМ магнитного пускателя. Для защиты от коротких замыканий в каждой фазе главной цепи электродвигателя устанавливаются предохранители F. Предохранители могут устанавливаться и в цепи управления. В реальных схемах неавтоматический выключатель Q и предохранители Fмогут быть заменены автоматическим выключателем. Отключение электродвигателя осуществляется нажатием на кнопочный выключатель SBТ.
В реальных схемах неавтоматический выключатель Q и предохранители Fмогут быть заменены автоматическим выключателем. Отключение электродвигателя осуществляется нажатием на кнопочный выключатель SBТ.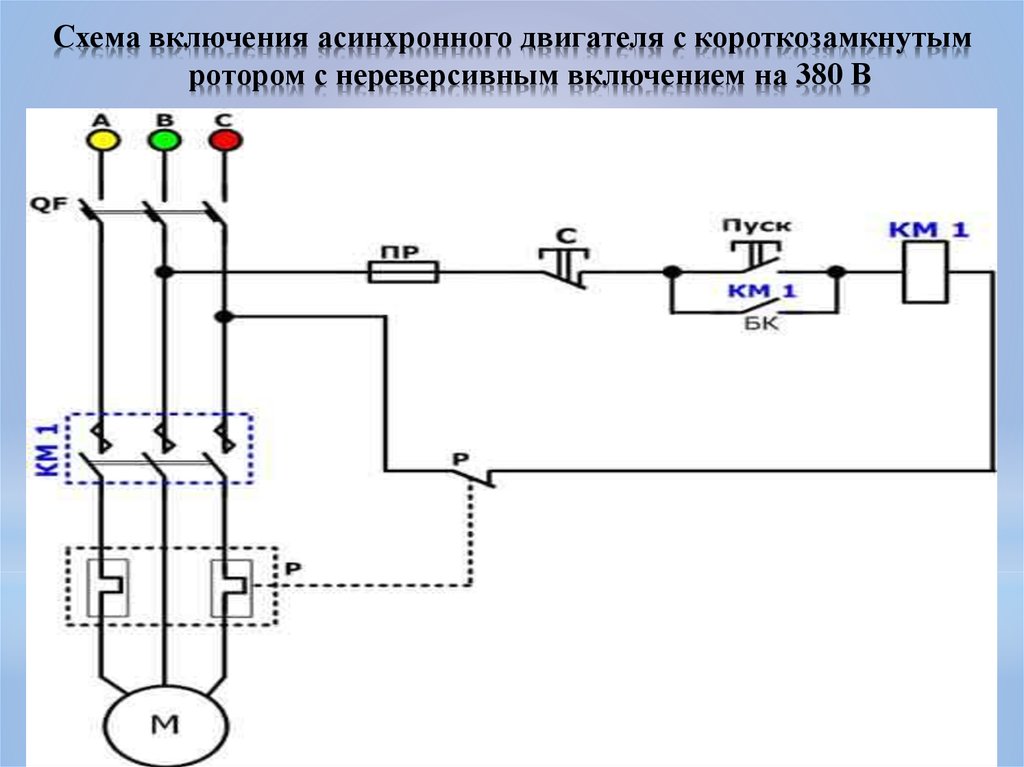 Вспомогательный контакт КМ1 в цепи управления шунтирует кнопочный выключатель SBС1 и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя.
Вспомогательный контакт КМ1 в цепи управления шунтирует кнопочный выключатель SBС1 и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя.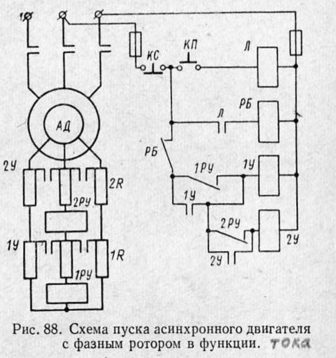
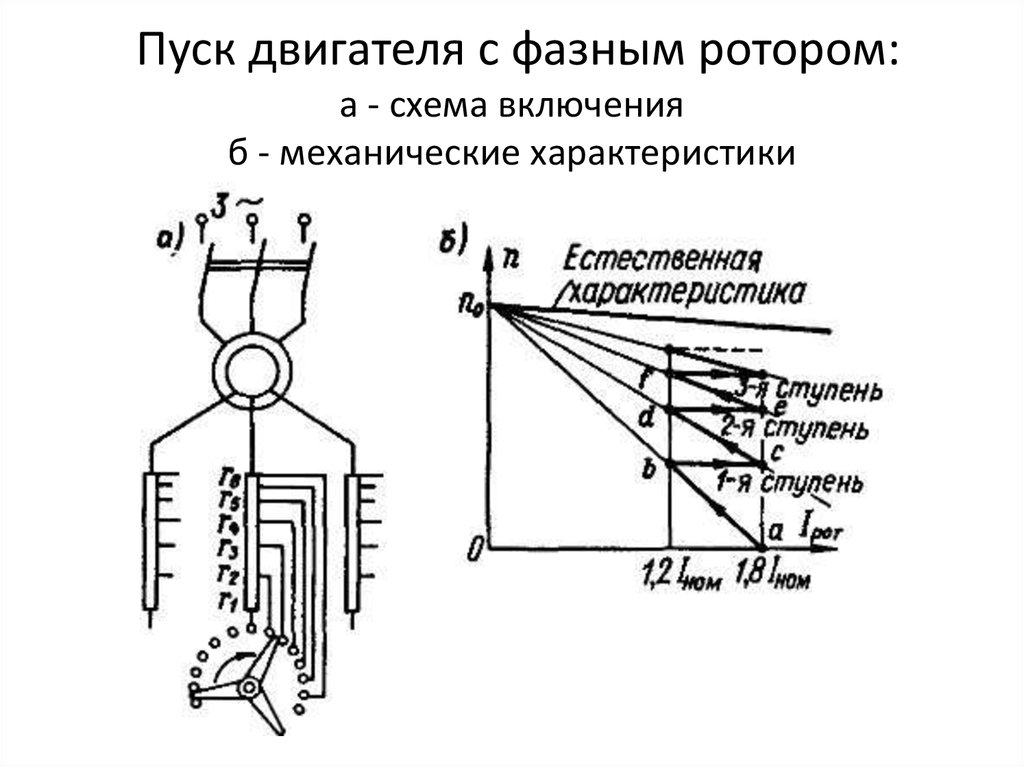 Для уменьшения пускового тока и увеличения пускового момента в цепь ротора включен трехступенчатый пусковой реостат R. Количество ступеней может быть различным. Пуск электродвигателя осуществляется линейным контактором КМ и контакторами ускорения КМ1 – КМ3. Контакторы снабжены реле времени. После включения автоматического выключателя QF кнопочным выключателем SBC включается линейный контактор КМ, который мгновенно замыкает свои контакты в главной цепи и шунтирует контакты кнопочного выключателя SBC. Двигатель начинает вращаться при полностью введенном пусковом реостате R (механическая характеристика 1 на рис. 2.11). Точка П является точкой трогания.
Для уменьшения пускового тока и увеличения пускового момента в цепь ротора включен трехступенчатый пусковой реостат R. Количество ступеней может быть различным. Пуск электродвигателя осуществляется линейным контактором КМ и контакторами ускорения КМ1 – КМ3. Контакторы снабжены реле времени. После включения автоматического выключателя QF кнопочным выключателем SBC включается линейный контактор КМ, который мгновенно замыкает свои контакты в главной цепи и шунтирует контакты кнопочного выключателя SBC. Двигатель начинает вращаться при полностью введенном пусковом реостате R (механическая характеристика 1 на рис. 2.11). Точка П является точкой трогания. С выдержкой времени t2включается контактор КМ2. Аналогично проходит процесс переключения ступеней пускового реостата R до перехода электропривода на естественную характеристику (кривая 4).
С выдержкой времени t2включается контактор КМ2. Аналогично проходит процесс переключения ступеней пускового реостата R до перехода электропривода на естественную характеристику (кривая 4). На рис. 2.13 приведена схема блокировки последовательности пуска и остановки двух электродвигателей.
На рис. 2.13 приведена схема блокировки последовательности пуска и остановки двух электродвигателей.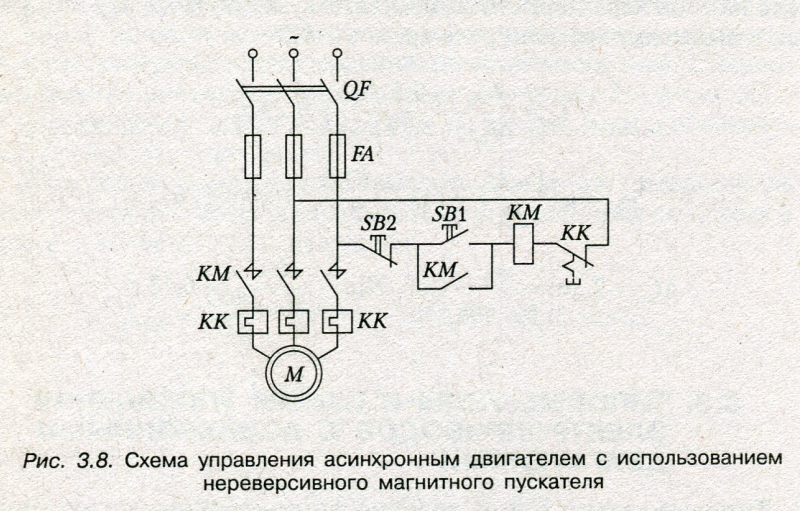 Включение электродвигателя М2 осуществляется кнопочным выключателем SBC2, а отключение – SBТ2. Включение двигателя М1 осуществляется выключателем SBC1, а отключение – SBT1. При этом отключается и выключатель М2.
Включение электродвигателя М2 осуществляется кнопочным выключателем SBC2, а отключение – SBТ2. Включение двигателя М1 осуществляется выключателем SBC1, а отключение – SBT1. При этом отключается и выключатель М2. Для этих целей используются автотрансформаторы с плавным регулированием напряжения, магнитные усилители, тиристорные регуляторы напряжения.
Для этих целей используются автотрансформаторы с плавным регулированием напряжения, магнитные усилители, тиристорные регуляторы напряжения.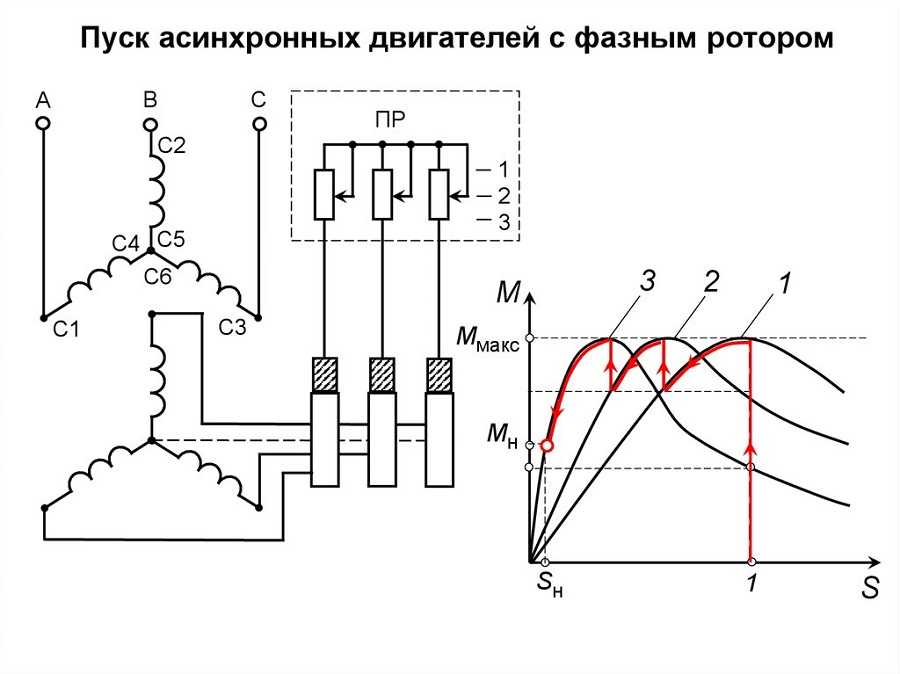

 Для приведения применяемых в МОУ ФК огнетушителей в рабочее состояние необходимо снять огнетушитель с крючка или вынуть из гнезда, где он находится, сорвать пломбу, вынуть защитную чеку, направить раструб на огонь и, не поднося его ближе одного метра к очагу пожара, нажать на рычаг.
Для приведения применяемых в МОУ ФК огнетушителей в рабочее состояние необходимо снять огнетушитель с крючка или вынуть из гнезда, где он находится, сорвать пломбу, вынуть защитную чеку, направить раструб на огонь и, не поднося его ближе одного метра к очагу пожара, нажать на рычаг.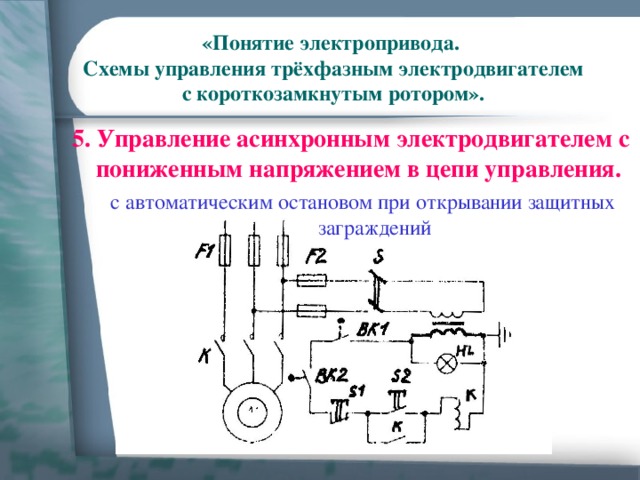
 Обратная связь — 38.242.236.216 (0.004 с.)
Обратная связь — 38.242.236.216 (0.004 с.)Методы управления скоростью асинхронного двигателя
Асинхронный двигатель практически является двигателем с постоянной скоростью, это означает, что для всего диапазона нагрузки изменение скорости двигателя довольно мало. Скорость шунтирующего двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и плохим коэффициентом мощности. Поскольку асинхронные двигатели широко используются, их регулирование скорости может потребоваться во многих приложениях. Ниже описаны различные методы управления скоростью асинхронного двигателя .
Регулятор скорости асинхронного двигателя со стороны статора
1. Изменением приложенного напряжения:
Из уравнения крутящего момента асинхронного двигателя,
Сопротивление ротора R 2 постоянно и если скольжение s мало, то (sX 2 ) 2 настолько мало, что им можно пренебречь. Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС ротора, а E 2 ∝ В
Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС ротора, а E 2 ∝ В
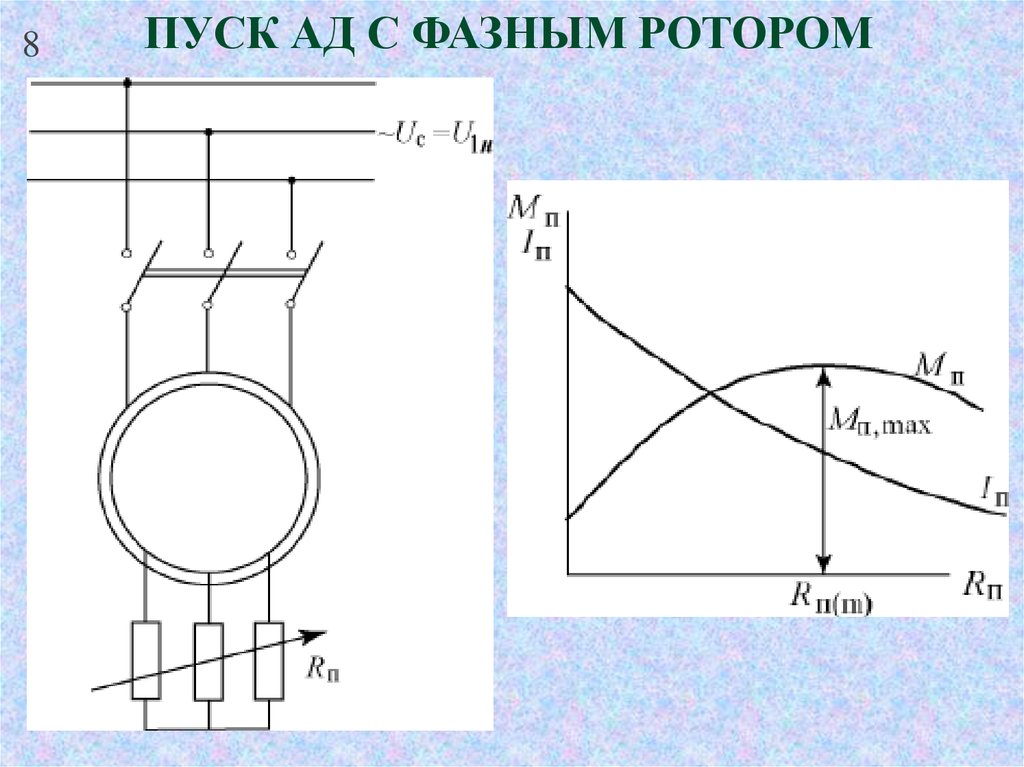
Таким образом, T ∝ sV 2 , а значит, при уменьшении подаваемого напряжения развиваемый момент уменьшается. Следовательно, для обеспечения одного и того же момента нагрузки скольжение увеличивается с уменьшением напряжения и, следовательно, скорость уменьшается. Этот метод является самым простым и дешевым, но до сих пор применяется редко, т. к. для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
2. При изменении приложенной частоты
Синхронная скорость вращающегося магнитного поля асинхронного двигателя определяется выражением
где, f = частота питания и P = количество полюсов статора.
Следовательно, синхронная скорость изменяется при изменении частоты питания. Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за уменьшения реактивного сопротивления. И если частота увеличивается сверх номинального значения, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
3. Постоянная V/F-регулировка асинхронного двигателя
Это наиболее популярный метод управления скоростью асинхронного двигателя. Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре будет стремиться к насыщению. Это вызовет чрезмерный ток статора и искажение волны потока статора.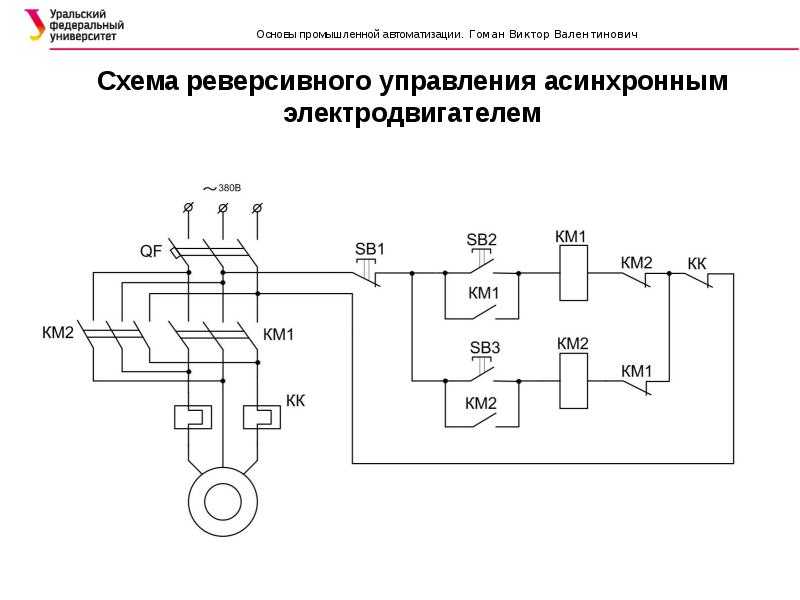 Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный поток в воздушном зазоре. Величина потока статора пропорциональна соотношению напряжения статора и частоты. Следовательно, если отношение напряжения к частоте поддерживается постоянным, поток остается постоянным. Кроме того, при сохранении постоянной V/F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».
Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный поток в воздушном зазоре. Величина потока статора пропорциональна соотношению напряжения статора и частоты. Следовательно, если отношение напряжения к частоте поддерживается постоянным, поток остается постоянным. Кроме того, при сохранении постоянной V/F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».
4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости видно, что синхронную скорость (и, следовательно, рабочую скорость) можно изменить, изменив количество полюсов статора. Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается за счет наматывания двух или более независимых статорных обмоток на разное число полюсов в одних и тех же пазах.
Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается за счет наматывания двух или более независимых статорных обмоток на разное число полюсов в одних и тех же пазах.
Например, статор намотан двумя трехфазными обмотками, одна на 4 полюса, а другая на 6 полюсов.
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-полюсной обмотки, Ns = 120*50/4 = 1500 об/мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120*50/6 = 1000 об/мин
Регулятор скорости со стороны ротора:
1. Управление реостатом ротора
Этот метод подобен способу управления якорным реостатом шунтового двигателя постоянного тока. Но этот метод применим только к двигателям с контактными кольцами, так как добавление внешнего сопротивления в ротор двигателей с короткозамкнутым ротором невозможно.
2. Каскадный режим
В этом методе управления скоростью используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель питается от ЭДС индукции в первом двигателе через токосъемные кольца. Расположение показано на следующем рисунке.
Двигатель А называется основным, а двигатель В — вспомогательным.
Пусть, N с1 = частота двигателя A
N с2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B
N = скорость установки и одинаковая для обоих двигателей
Теперь f = частота питания 9008 двигателя A, S 1 = (N с1 — N) / N с1 .
частота ЭДС ротора в двигателе А, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС ротора
поэтому, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .
Теперь введите значение S 1 = (N s1 — N) / N s1
На холостом ходу скорость вспомогательного ротора почти равна его синхронной скорости.
т.е. N = N s2 .
из приведенных выше уравнений можно получить, что
С помощью этого метода можно получить четыре различных скорости
1. когда работает только двигатель А, соответствующая скорость = .Ns1 = 120f / P 1
2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. если выполняется накопительное каскадирование, скорость установки = N = 120f / (P 1 + P 2 )
4. если выполнено дифференциальное каскадирование, скорость установки = N = 120f (P 1 — P 2 )
3. Вводом ЭДС в цепь ротора
В этом методе скорость асинхронного двигателя регулируется путем подачи напряжения в цепь ротора. Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений на фазу инжектируемой ЭДС нет. Если мы введем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличено. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится. Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.
Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений на фазу инжектируемой ЭДС нет. Если мы введем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличено. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится. Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.
Что такое трехфазный двигатель и как он работает?
Трехфазные двигатели (также обозначенные как трехфазные двигатели) широко используются в промышленности и стали рабочей лошадкой многих механических и электромеханических систем благодаря своей относительной простоте, проверенной надежности и длительному сроку службы. Трехфазные двигатели являются одним из примеров типа асинхронного двигателя, также известного как асинхронный двигатель, который работает с использованием принципов электромагнитной индукции. Хотя существуют также однофазные асинхронные двигатели, эти типы асинхронных двигателей реже используются в промышленности, но широко используются в быту, например, в пылесосах, компрессорах холодильников и кондиционерах, благодаря использованию однофазных асинхронных двигателей. фазное питание переменного тока в домах и офисах. В этой статье мы обсудим, что такое трехфазный двигатель и опишем, как он работает. Чтобы получить доступ к другим ресурсам о двигателях, обратитесь к одному из наших других руководств по двигателям, посвященным двигателям переменного тока, двигателям постоянного тока, асинхронным двигателям, или к более общей статье о типах двигателей. Полный список связанных статей по двигателям находится в разделе связанных статей.
Трехфазные двигатели являются одним из примеров типа асинхронного двигателя, также известного как асинхронный двигатель, который работает с использованием принципов электромагнитной индукции. Хотя существуют также однофазные асинхронные двигатели, эти типы асинхронных двигателей реже используются в промышленности, но широко используются в быту, например, в пылесосах, компрессорах холодильников и кондиционерах, благодаря использованию однофазных асинхронных двигателей. фазное питание переменного тока в домах и офисах. В этой статье мы обсудим, что такое трехфазный двигатель и опишем, как он работает. Чтобы получить доступ к другим ресурсам о двигателях, обратитесь к одному из наших других руководств по двигателям, посвященным двигателям переменного тока, двигателям постоянного тока, асинхронным двигателям, или к более общей статье о типах двигателей. Полный список связанных статей по двигателям находится в разделе связанных статей.
Что такое трехфазное питание?
Чтобы разобраться в трехфазных двигателях, полезно сначала разобраться с трехфазным питанием.
При производстве электроэнергии переменный ток (AC), создаваемый генератором, характеризуется тем, что его амплитуда и направление меняются со временем. Если графически показать амплитуду по оси Y и время по оси X, зависимость между напряжением или током и временем будет напоминать синусоиду, как показано ниже:
Рисунок 1 – Однофазный переменный ток
Изображение предоставлено: Фуад А. Саад/Shutterstock.com
Электроэнергия, подаваемая в дома, является однофазной, а это означает, что имеется один проводник с током, а также соединение с нейтралью и заземление. В трехфазном питании, которое используется в промышленных и коммерческих условиях для запуска более крупного оборудования, требующего большей мощности, есть три проводника электрического тока, каждый из которых работает с разностью фаз 120 o на расстоянии 2π/3 радиана друг от друга. Если посмотреть графически, каждая фаза будет отображаться как отдельная синусоида, которая затем объединяется, как показано на изображении ниже:
Рисунок 2 – Трехфазная электроэнергия со сдвигом фаз 120
o между каждой фазой
Изображение предоставлено: teerawat chitprung/Shutterstock. com
com
Трехфазные двигатели питаются от электрического напряжения и тока, которые генерируются как трехфазная входная мощность и затем используются для производства механической энергии в виде вращающегося вала двигателя.
Что такое трехфазный двигатель?
Трехфазные двигатели — это тип двигателя переменного тока, который является конкретным примером многофазного двигателя. Эти двигатели могут быть либо асинхронными двигателями (также называемыми асинхронными двигателями), либо синхронными двигателями. Двигатели состоят из трех основных компонентов – статора, ротора и корпуса.
Статор состоит из ряда пластин из легированной стали, вокруг которых намотана проволока, образующая индукционные катушки, по одной катушке на каждую фазу источника электроэнергии. Обмотки статора питаются от трехфазного источника питания.
Ротор также содержит индукционные катушки и металлические стержни, соединенные в цепь. Ротор окружает вал двигателя и является компонентом двигателя, который вращается для создания выходной механической энергии двигателя.
Корпус двигателя удерживает ротор вместе с валом двигателя на наборе подшипников для уменьшения трения вращающегося вала. Корпус имеет торцевые крышки, удерживающие опоры подшипников, и вентилятор, прикрепленный к валу двигателя, который вращается при вращении вала двигателя. Вращающийся вентилятор всасывает окружающий воздух снаружи корпуса и нагнетает его через статор и ротор для охлаждения компонентов двигателя и рассеивания тепла, выделяемого в различных катушках из-за сопротивления катушки. Корпус также обычно имеет приподнятые механические ребра снаружи, которые служат для дальнейшего отвода тепла к наружному воздуху. Торцевая крышка также обеспечивает место для размещения электрических соединений для трехфазного питания двигателя.
Как работает трехфазный двигатель?
Трехфазные двигатели работают по принципу электромагнитной индукции, который был открыт английским физиком Майклом Фарадеем еще в 1830 году. Фарадей заметил, что когда проводник, такой как катушка или петля провода, помещается в изменяющееся магнитное поле, возникает индуцированная электродвижущая сила или ЭДС, которая генерируется в проводнике.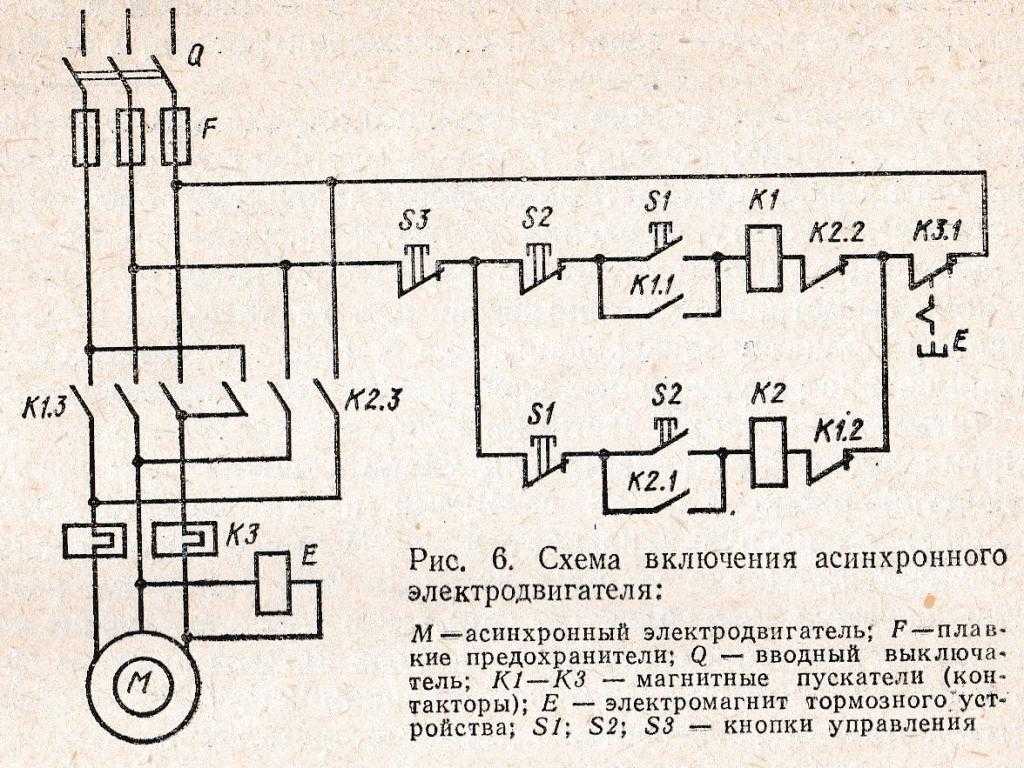 Он также заметил, что ток, протекающий в проводнике, таком как провод, будет генерировать магнитное поле и что магнитное поле будет меняться по мере того, как ток в проводе изменяется либо по величине, либо по направлению. Это выражается в математической форме, связывая ротор электрического поля со скоростью изменения во времени магнитного потока:
Он также заметил, что ток, протекающий в проводнике, таком как провод, будет генерировать магнитное поле и что магнитное поле будет меняться по мере того, как ток в проводе изменяется либо по величине, либо по направлению. Это выражается в математической форме, связывая ротор электрического поля со скоростью изменения во времени магнитного потока:
Эти принципы составляют основу для понимания того, как работает трехфазный двигатель.
Рисунок 3 ниже иллюстрирует закон индукции Фарадея. Обратите внимание, что наличие ЭДС зависит от движения магнита, что приводит к существованию изменяющегося магнитного поля.
Рисунок 3 – Принцип электромагнитной индукции
Изображение предоставлено: Фуад А. Саад/Shutterstock.com
Для асинхронных двигателей, когда статор питается от трехфазного источника электроэнергии, каждая катушка создает магнитное поле, полюса которого (северный или южный) меняют положение, когда переменный ток совершает колебания в течение полного цикла.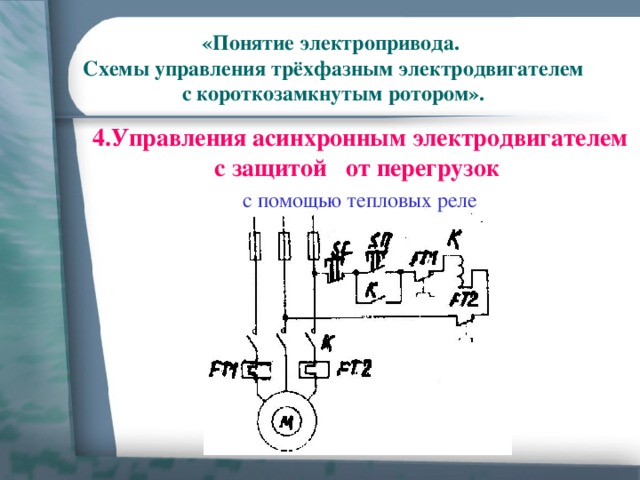 Поскольку каждая из трех фаз переменного тока сдвинута по фазе на 120 или , магнитная полярность трех катушек не одинакова в один и тот же момент времени. Это условие приводит к тому, что статор создает то, что известно как RMF или вращающееся магнитное поле. Поскольку ротор находится в центре катушек статора, изменяющееся магнитное поле статора индуцирует ток в катушках ротора, что, в свою очередь, приводит к созданию ротором противоположного магнитного поля. Поле ротора стремится выровнять свою полярность с полем статора, в результате чего к валу двигателя прикладывается чистый крутящий момент, и он начинает вращаться, стремясь привести свое поле в соответствие. Обратите внимание, что в трехфазном асинхронном двигателе нет прямого электрического соединения с ротором; магнитная индукция вызывает вращение двигателя.
Поскольку каждая из трех фаз переменного тока сдвинута по фазе на 120 или , магнитная полярность трех катушек не одинакова в один и тот же момент времени. Это условие приводит к тому, что статор создает то, что известно как RMF или вращающееся магнитное поле. Поскольку ротор находится в центре катушек статора, изменяющееся магнитное поле статора индуцирует ток в катушках ротора, что, в свою очередь, приводит к созданию ротором противоположного магнитного поля. Поле ротора стремится выровнять свою полярность с полем статора, в результате чего к валу двигателя прикладывается чистый крутящий момент, и он начинает вращаться, стремясь привести свое поле в соответствие. Обратите внимание, что в трехфазном асинхронном двигателе нет прямого электрического соединения с ротором; магнитная индукция вызывает вращение двигателя.
У трехфазных асинхронных двигателей ротор стремится сохранить соосность с RMF статора, но никогда этого не достигает, поэтому асинхронные двигатели также называют асинхронными двигателями.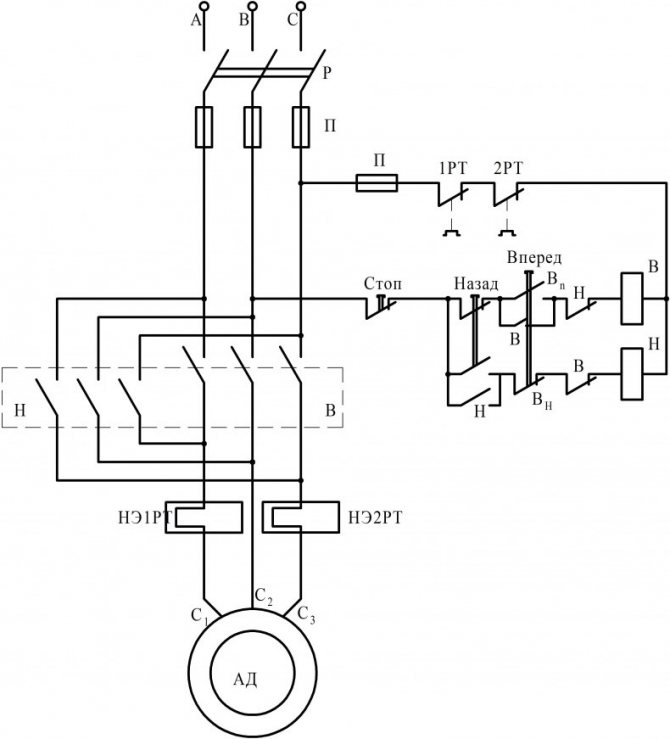 Явление, из-за которого скорость ротора отстает от скорости RMF, известно как скольжение и выражается как:
Явление, из-за которого скорость ротора отстает от скорости RMF, известно как скольжение и выражается как:
где N r — скорость ротора, а N s — синхронная скорость вращающегося поля (RMF) статора.
Синхронные двигатели работают аналогично асинхронным двигателям, за исключением того, что в случае синхронного двигателя поля статора и ротора синхронизированы, так что RMF статора заставит ротор вращаться с точно такой же скоростью вращения (в синхронизация – поэтому скольжение равно 0). Для получения дополнительной информации о том, как это достигается, обратитесь к этим статьям о реактивных двигателях и бесщеточных двигателях постоянного тока. Обратите внимание, что синхронные двигатели, в отличие от асинхронных двигателей, не должны питаться от сети переменного тока.
Контроллеры двигателей для трехфазных двигателей
Скорость, создаваемая трехфазным двигателем переменного тока, зависит от частоты сети переменного тока, поскольку она является источником RMF в обмотках статора.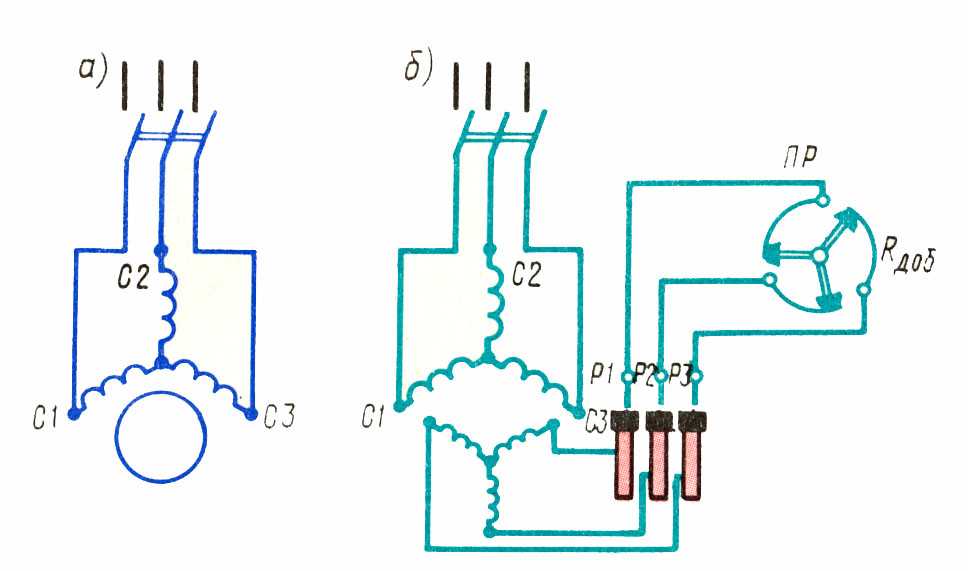 Таким образом, некоторые контроллеры двигателей переменного тока работают, используя входной ток переменного тока для генерации модулированного или регулируемого входного сигнала частоты для двигателя, тем самым контролируя скорость двигателя. Другой подход, который можно использовать для управления скоростью двигателя, заключается в изменении скольжения (описано ранее). Если скольжение увеличивается, скорость двигателя (то есть скорость ротора) уменьшается.
Таким образом, некоторые контроллеры двигателей переменного тока работают, используя входной ток переменного тока для генерации модулированного или регулируемого входного сигнала частоты для двигателя, тем самым контролируя скорость двигателя. Другой подход, который можно использовать для управления скоростью двигателя, заключается в изменении скольжения (описано ранее). Если скольжение увеличивается, скорость двигателя (то есть скорость ротора) уменьшается.
Чтобы узнать больше о подходах к управлению двигателями, ознакомьтесь с нашей статьей о контроллерах двигателей переменного тока.
Резюме
В этой статье представлено краткое обсуждение того, что такое трехфазные двигатели и как они работают. Чтобы узнать больше о двигателях, ознакомьтесь с нашими соответствующими статьями, перечисленными ниже. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.