Построение механической характеристики асинхронного двигателя
Асинхронный двигатель
Для оценки свойств асинхронного двигателя прибегают к построению механической характеристики.
Механическая характеристика асинхронного двигателя выражает зависимость между электромагнитным моментом и частотой вращения, либо скольжением. Скольжение – это величина, которая показывает, насколько частота вращения магнитного поля опережает частоту вращения ротора.
Благодаря механической характеристике, появляется возможность определить к какому типу установки больше подходит двигатель, на каком участке сохраняется его устойчивая работа, перегрузочную способность и другое.
Построим механическую характеристику для двигателя 4A90L4У3.
Паспортные данные двигателя:
n1 = 1500 об/мин
Pн = 2.2 КВт
nн = 1425 об/мин
η = 80 %
cos φ = 0.83
Mmax/Mн = λ = 2,2
Для построения нам необходимо произвести расчет номинального момента и скольжения.
Рассчитаем критическое скольжение и момент, для этого необходимо знать коэффициент λ.
Итак, мы определили основные точки характеристики, но для её построения их недостаточно. Поэтому с помощью упрощенной формулы Клосса, рассчитаем моменты для других значений скольжений.
Упрощенная формула Клосса выглядит следующим образом
Для удобства составим таблицу.
|
s
|
0
| sн | sкр/2 | sкр |
0.2
|
0.3
|
0.4
|
0.5
|
0.6
|
0.
|
0.8
|
0.9
|
1
|
|
M
|
0
|
14.61
|
25.94
|
32.43
|
32,39
|
30.47
|
26.69
|
23.16
|
20.22
|
17.85
|
15.93
|
14.35
|
13.05
|
|
n
|
1500
|
1425
|
1342.
|
1185
|
1200
|
1050
|
900
|
750
|
600
|
450
|
300
|
150
|
0
|
 7
7 5
5
Рассчитаем для каждого значения скольжения момент и частоту вращения. Например, для значения 0.2
Частоту вращения выразим из формулы для определения скольжения
Подобным образом рассчитываются остальные значения.
Так как формула упрощенная, значения могут несколько отличаться от действительных, что не критично для расчетов.
Теперь на основании расчетов мы можем построить саму механическую характеристику.
Зависимость момента от скольжения M = f(s)
Зависимость частоты оборотов от момента n = f(M)
Рекомендуем — механическая характеристика электропривода
Расчет механической характеристики асинхронного электродвигателя для работы в составе приводов буровых установок
Автор:
Филин Виталий Андреевич
Рубрика: Технические науки
Опубликовано
в
Молодой учёный
№38 (328) сентябрь 2020 г.
Дата публикации: 15.09.2020
2020-09-15
Статья просмотрена:
247 раз
Скачать электронную версию
Скачать Часть 1 (pdf)
Библиографическое описание:
Филин, В. А. Расчет механической характеристики асинхронного электродвигателя для работы в составе приводов буровых установок / В. А. Филин. — Текст : непосредственный // Молодой ученый. — 2020. — № 38 (328). — С. 15-19. — URL: https://moluch.ru/archive/328/73610/ (дата обращения: 23.11.2022).
А. Расчет механической характеристики асинхронного электродвигателя для работы в составе приводов буровых установок / В. А. Филин. — Текст : непосредственный // Молодой ученый. — 2020. — № 38 (328). — С. 15-19. — URL: https://moluch.ru/archive/328/73610/ (дата обращения: 23.11.2022).
В статье представлен расчет механической характеристики асинхронного электродвигателя в составе буровой установки. Целью работы является построение механической характеристики асинхронного электродвигателя с помощью программы. В ходе работы выполняется построение зависимостей частоты вращения от момента, зависимостей момента от скольжения на основе аналитического метода и математического моделирования.
Ключевые слова:
асинхронный двигатель, механическая характеристика, электрический привод.
Ярко выраженной тенденцией производства электроприводов буровой установки является все более широкое применение асинхронных двигателей (АД).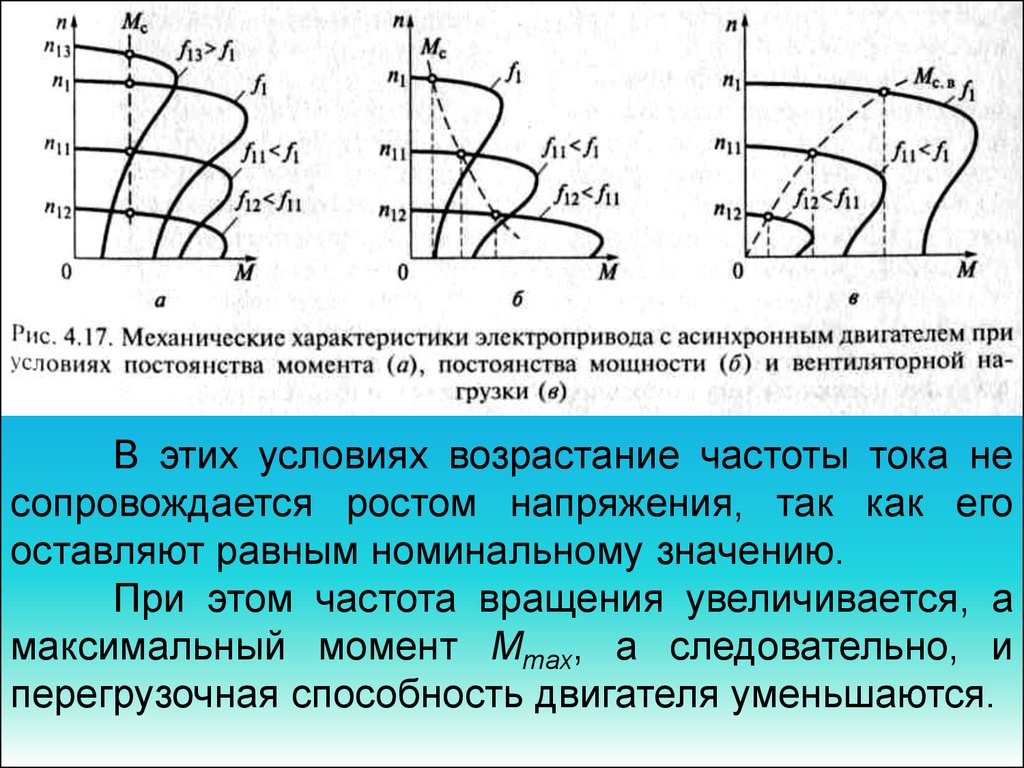 [6] Во многом это связанно с конструктивными особенностями АД, а именно простая конструкция, низкая стоимость из-за небольшого количества цветного металла, неприхотливые эксплуатационные условия. Основным соображением для проектировщика асинхронного двигателя является конструкция двигателя с высоким пусковым моментом, лучшим КПД и коэффициентом мощности.
[6] Во многом это связанно с конструктивными особенностями АД, а именно простая конструкция, низкая стоимость из-за небольшого количества цветного металла, неприхотливые эксплуатационные условия. Основным соображением для проектировщика асинхронного двигателя является конструкция двигателя с высоким пусковым моментом, лучшим КПД и коэффициентом мощности.
Но требования к энергоэффективности из года в год ужесточаются, что заставляет производителей идти на вынужденную модернизацию имеющихся моделей либо проектировать абсолютно новые. Для правильной эксплуатации двигателя силового привода важно знать, как будут меняться его основные параметры, т. е. крутящий момент М, частота вращения n и мощность N, в зависимости от нагрузки и изменения напряжения и частоты тока в питающейся сети.
Расчет механической характеристики возможно произвести тремя способами: аналитический методом, на основе формул и зависимостей, построение математической модели, экспериментальное исследование.
Таблица 1
Основные параметры АД при частоте сети 50 Гц
| |
Полезная мощности, кВт | 1200 |
Частота вращения (синхронная), об/мин | 500 |
Частота вращения, об/мин | 480 |
Отношение макс. момента к номинальному, о.е. | 1,8 |
Моменты, создаваемые двигателем и исполнительным органом рабочей машины, могут иметь разные значения при различных частотах вращения. При выборе электродвигателя необходимо, чтобы его электромеханические свойства соответствовали технологическим требованиям приводимой им рабочей машины. К электромеханическим свойствам в первую очередь относится механическая характеристика. Механической характеристикой электродвигателя называют зависимость между частотой вращения вала двигателя и развиваемым им
К электромеханическим свойствам в первую очередь относится механическая характеристика. Механической характеристикой электродвигателя называют зависимость между частотой вращения вала двигателя и развиваемым им
n = f(М)
. Вместо частоты вращения вала
n
можно записать
ω = f(М)
, так как эти величины пропорциональны
ω = πn/30
. [1] Под скольжением подразумевается величина в относительных единицах, которая характеризует отставание скорости вращения ротора от синхронной скорости вращения поля статора, создаваемого трехфазной обмоткой [2]
Скольжением асинхронной машины выражается отношением:
(1)
Электромагнитный момент М на валу асинхронной машины пропорционален величине магнитного потока и активной составляющей тока в обмотке ротора, которая зависит от величины скольжения.
(2)
где
m
— число фаз обмотки статора;
U
— фазное напряжение сети;
R
c
-активное сопротивление фазы обмотки статора;
R
p
— активное сопротивление фазы обмотки ротора, приведённое к статору;
Х
с
— индуктивное сопротивление фазы обмотки статора;
Х
р
— индуктивное сопротивление фазы обмотки ротора, приведённое к статору.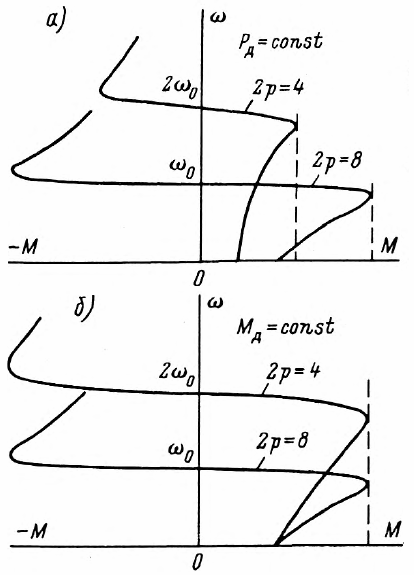
Критическое скольжение по параметрам обмоток двигателя определяется по формуле
(3)
Подставив (2) и (3) получим выражение для определения критического момента
(4)
Номинальный момент АД (Н∙м) вычисляется по формуле
(5)
где
P
ном
— номинальная мощность двигателя,
n
ном
— номинальная частота вращения.
Для расчета механической характеристики АД мощностью более 100 кВт пользуются упрощенной формулой Клосса.
(6)
Значение пускового момента АД можно определить постановкой
s = 1
в формулу (2) или по данным каталога, используя формулу
M
п
= K
м
M
ном
, где
K
м
— кратность пускового момента по отношению к номинальному.
Уравнения (6) в достаточной мере описывает механические свойства АД. В асинхронных электродвигателях с короткозамкнутым ротором в той или иной мере наблюдается явление вытеснения тока в стержнях ротора, в связи с чем их параметры непостоянны и механические характеристики значительно отличаются от характеристик, рассчитанных по формулам Клосса. В частности, у некоторых электродвигателей с КЗ ротором при малых скоростях вращения наблюдается снижение момента, вызванное влиянием высших гармоник поля. [3]
В частности, у некоторых электродвигателей с КЗ ротором при малых скоростях вращения наблюдается снижение момента, вызванное влиянием высших гармоник поля. [3]
Таблица 2
Численные расчетные значения вращающегося момента
| 0,04 | 0,065 | 0,131 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 |
| 23,87 | 34,38 | 42,97 | 39,49 | 31,66 | 25,55 | 21,19 | 18,01 | 15,01 | 13,79 | 12,32 | 11,14 |
| 480 | 467 | 434 | 400 | 350 | 300 | 250 | 200 | 150 | 100 | 50 | 0 |
Выдвигаем гипотезу, что при математическом моделировании будет более высокая точность расчета механической характеристики.
Для достижения поставленных задач воспользуемся пакетом прикладных программ Elcut Студенческая версия. Elcut — это программное обеспечение для моделирования мультифизических задач. К его преимуществам относятся довольно простой процесс моделирования, дружественный интерфейс и незначительное потребление ресурсов. Также стоит отметить: это ПО является продуктом отечественной компании, что благоприятно сказывается на его доступности в условиях сложной политической обстановки. [5]
Расчет машины проводился методом конечных элементов. В основе электромагнитного расчета лежит модель, включающая в себя геометрию машины, магнитные и электрические свойства её активных материалов, режимные параметры и действующие нагрузки. В ходе расчёта определяются индукции и токи в сечениях модели. Затем определяются силы и моменты, а также энергетические показатели. [4]
Таблица 3
Численные моделируемые значения вращающегося момента
| 0,048 | 0,079 | 0,158 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 |
| 24,59 | 35,41 | 44,26 | 37,52 | 26,59 | 21,46 | 17,80 | 15,13 | 13,13 | 11,58 | 10,35 | 9,35 |
| 480 | 460 | 420 | 400 | 350 | 300 | 250 | 200 | 150 | 100 | 50 | 0 |
 е
е Рис.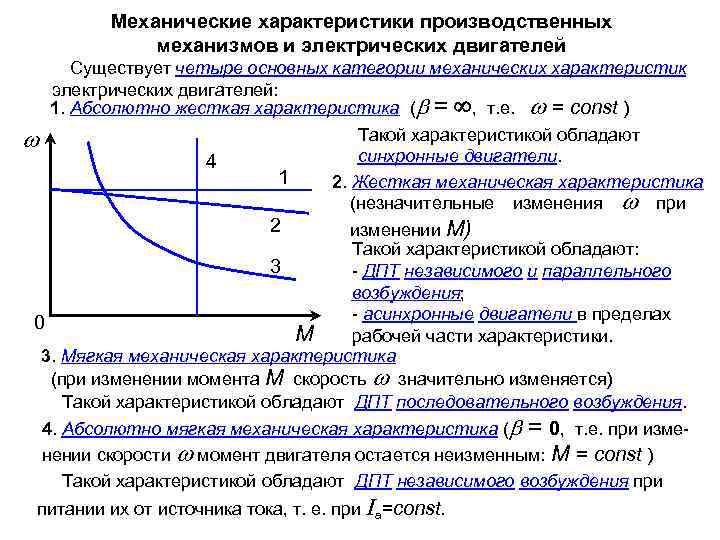 1. Механическая характеристика асинхронного двигателя
1. Механическая характеристика асинхронного двигателя
В результате моделирования получен график зависимости медной обмотки статора и ротора (рис 2.). Программа выполняет расчет сил и моментов. Полученные значения переносим в MS Excel, так как функционал программы не позволяет работать с графиками. Итоговый вариант представлен на рис. 1. Электромагнитное поле создается током, протекающим в трехфазной обмотке статора. При изменении фазы тока наблюдается изменение плотности тока в обмотке ротора. На основании изменения фазы тока в обмотке статора, меняется плотность тока. В связи с выше сказанным, можно сделать вывод о правильности построения модели.
В ходе построения механических характеристик двумя способами совпадают до значения номинального момента. Последующим наиболее значимым отклонением является пусковой и критический момент.
Пусковой момент полученный при моделировании составляет
М
мод
= 9,35 кН∙м
что меньше расчетного пускового момента
М
расч
= 11,14 кН∙м
. Критическое скольжение отличается
Критическое скольжение отличается
s
к.рас
= 0,131
,
s
к.мод
= 0,159
. Предполагаю, что из-за эффекта вытеснения тока, связанного с влиянием высших гармоник поля.
Рис. 2. Построение механической характеристики в Elcut
В статье представлено построение механической характеристики асинхронного электродвигателя двумя методами: аналитический и математическое моделирование. Примером был выбран АД используемый в приводе трансмиссионного вала буровой установки.
В ходе расчетов были выявлены следующие последовательности: разница номинального момента между аналитическим и моделированным показателем составляет 3 %, критический момент — 2,9 %. В свою очередь пусковой момент — 16 %. Малое значение пускового момента оказывает влияние на величину критического момента.
На основании этого можно сделать вывод, что механическая характеристика АД, полученная в процессе моделирования, соответствует теории и является более корректной, чем характеристика, построенная аналитическим методом.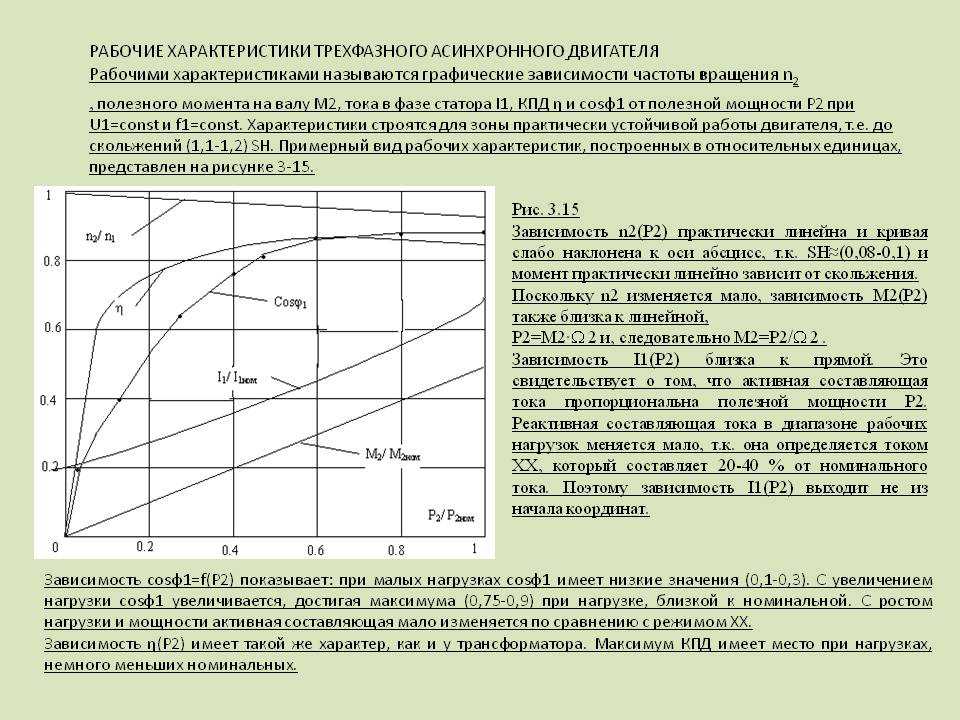
Литература:
- Ершов М. С., Яризов А. Д. Энергосберегающий электропривод технологических установок трубопроводного транспорта газа, нефти и нефтепродуктов: Учеб. пособие для вузов. М.: РГУ нефти и газа имени И. М. Губкина, 2011. -246 с.: ил.
- Вольдек А. И., Попов В. В. Электрические машины. Машины переменного тока. М.: Питер, 2008. 349 с. ISBN 978–5–469–01381–5.
- Лысенко О. А., Симаков А. В., Кузнецова М. А., Никонов А. В. Расчет механической характеристики асинхронного погружного электродвигателя методом конечных элементов // Омский научный вестник. 2018. № 6 (162). С. 55–60. DOI:10.25206/1813–8225–2018–162–55–60.
- Анненков А. Н., Филонов С. А., Шиянов А. И. Моделирование и поиск рациональной конструкции асинхронного двигателя малой мощности с повышенным пусковым моментом // Вестник ВГТУ. 2009. № 11.
- ELCUT 6.2. Руководство пользователя. СПб.: TOP, 2017. 287 с.
- IEA (2020), World Energy Balances: Overview, IEA, Paris https://www.
 iea.org/reports/world-energy-balances-overview
iea.org/reports/world-energy-balances-overview
 iea.org/reports/world-energy-balances-overview
iea.org/reports/world-energy-balances-overviewОсновные термины (генерируются автоматически): механическая характеристика, пусковой момент, критический момент, асинхронный двигатель, асинхронный электродвигатель, буровая установка, математическое моделирование, номинальный момент, частота вращения, аналитический метод.
Ключевые слова
асинхронный двигатель,
механическая характеристика,
электрический привод
асинхронный двигатель, механическая характеристика, электрический привод
Похожие статьи
Исследование
методов расчета параметров схемы замещения…
Математическая модель асинхронного двигателя во. .. Рассмотрим трехфазный асинхронный короткозамкнутый двигатель со следующими номинальными данными и параметрами схемы замещения [4]. Суммарный момент инерции двигателя и механизма, приведенный к валу…
.. Рассмотрим трехфазный асинхронный короткозамкнутый двигатель со следующими номинальными данными и параметрами схемы замещения [4]. Суммарный момент инерции двигателя и механизма, приведенный к валу…
Похожие статьи
Исследование
методов расчета параметров схемы замещения…
Математическая модель асинхронного двигателя во… Рассмотрим трехфазный асинхронный короткозамкнутый двигатель со следующими номинальными данными и параметрами схемы замещения [4]. Суммарный момент инерции двигателя и механизма, приведенный к валу…
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Посмотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла
Томас Давенпорт
Ипполит Фонтейн
Майкл Фарадей
- Похожие темы:
- синхронный двигатель
линейный двигатель
Индукционный двигатель
реактивный двигатель
вращательный двигатель
См. всю связанную информацию →
всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников с током в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются по способу расположения проводников и поля, а также по возможному управлению механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.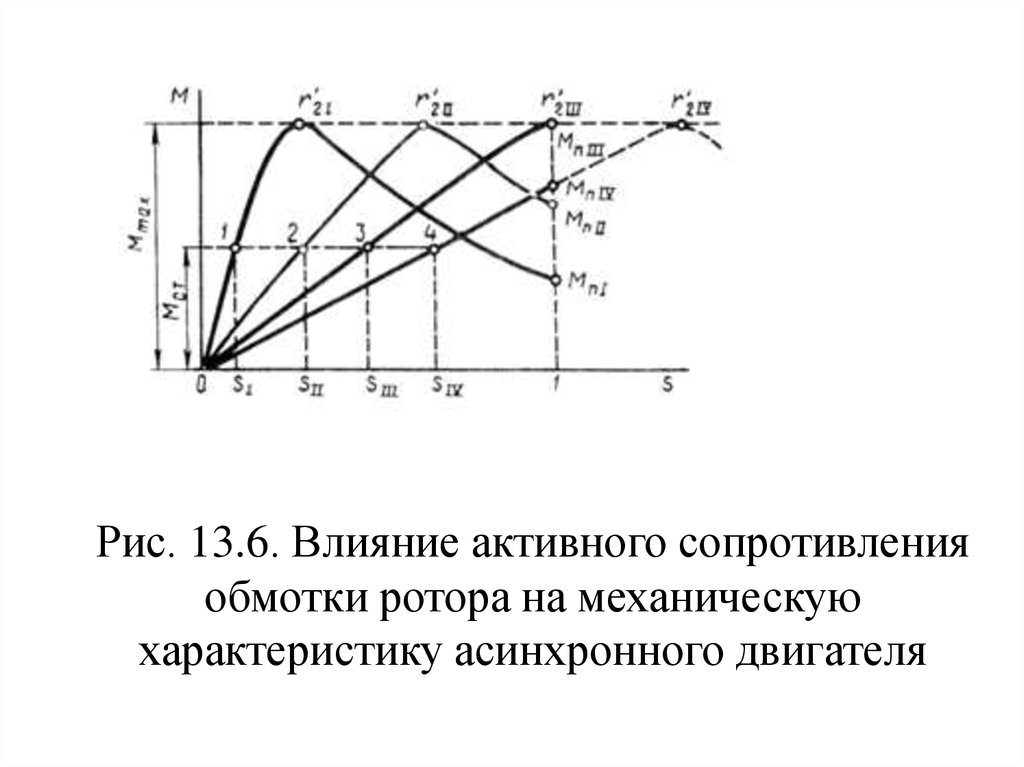 е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Викторина «Британника»
Электричество: короткие замыкания и постоянные токи
В чем разница между электрическим проводником и изолятором? Кто изобрел аккумулятор? Почувствуйте, как ваши клетки горят, пока вы перезаряжаете свою умственную батарею, отвечая на вопросы этой викторины.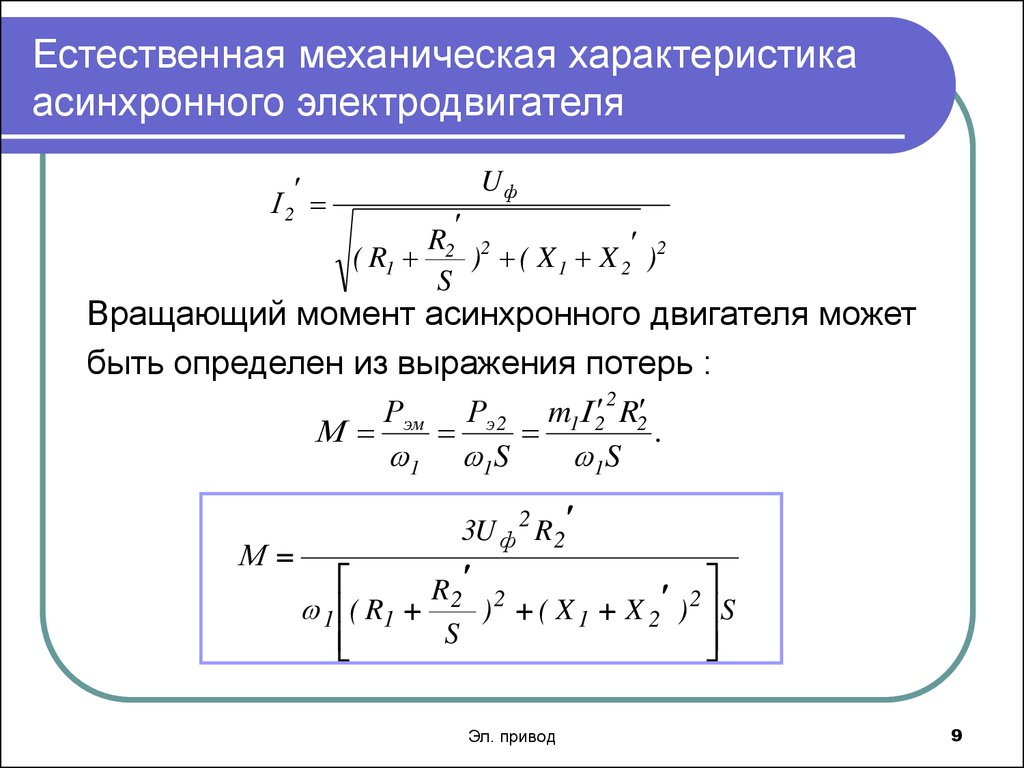
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента.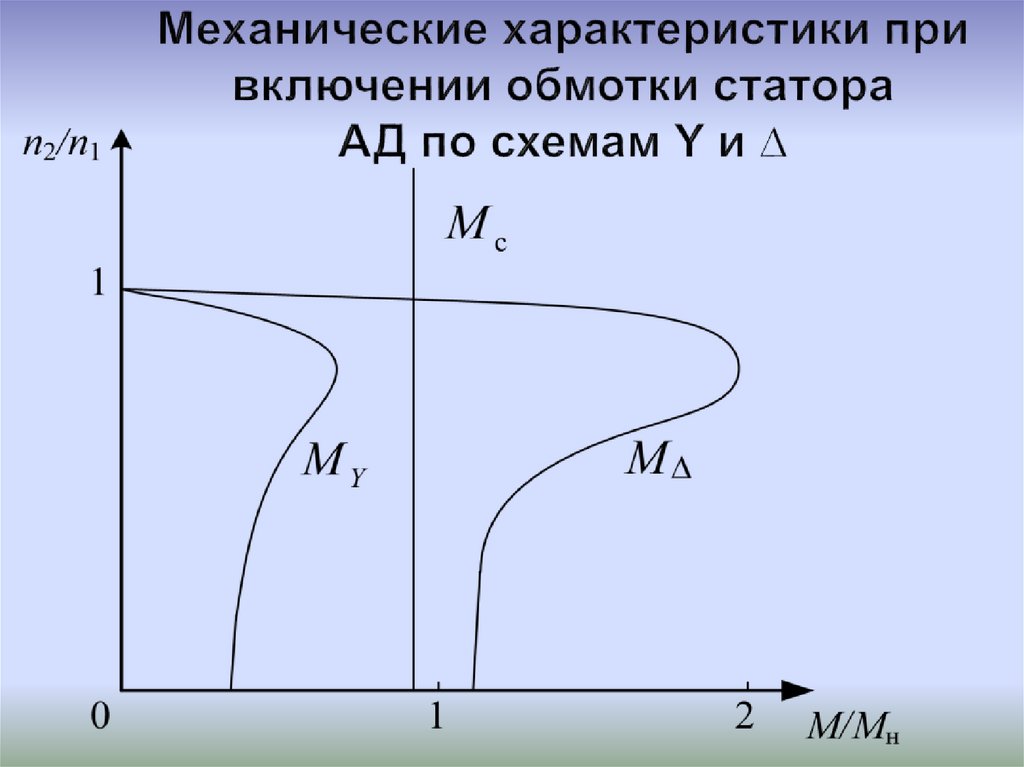 Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность.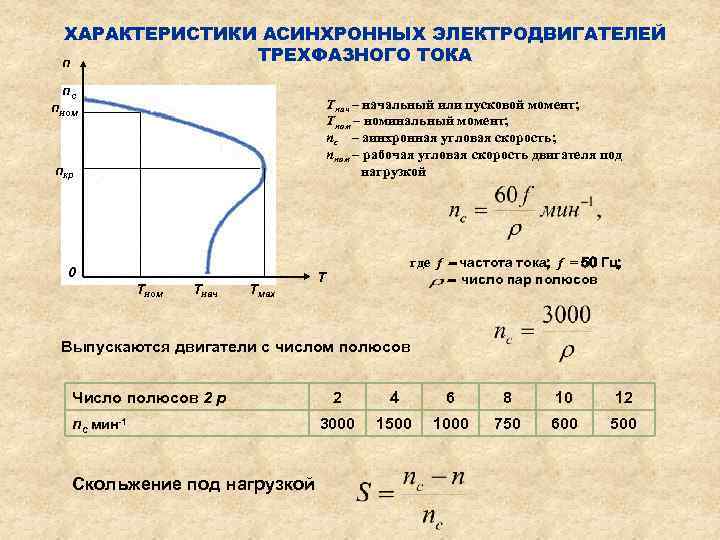 Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины.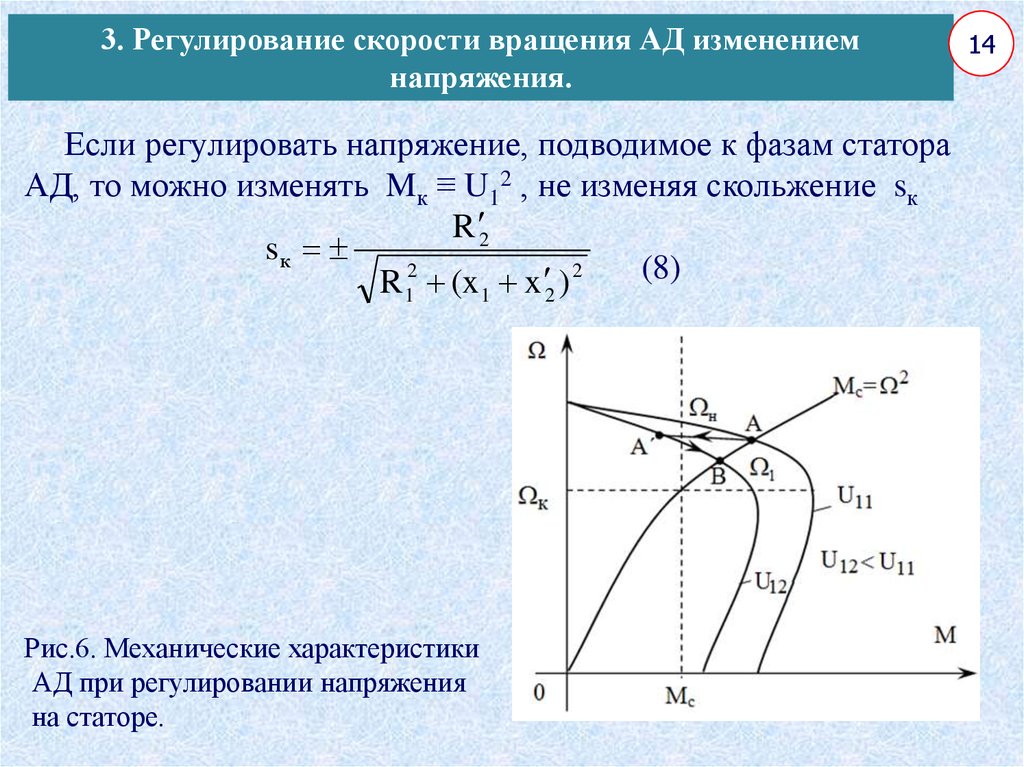 Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число). Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ р )°. Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число). Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ р )°. Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Трехфазный асинхронный двигатель: конструкция и принцип работы
Трехфазные асинхронные двигатели являются наиболее широко используемыми электродвигателями в промышленности. Они работают по принципу электромагнитной индукции.
Они работают по принципу электромагнитной индукции.
Из-за сходства принципа работы трансформатора он также известен как вращающийся трансформатор .
Они работают практически с постоянной скоростью от холостого хода до полной нагрузки. Однако скорость зависит от частоты и, следовательно, эти двигатели не легко адаптируются к регулированию скорости .
Мы обычно предпочитаем двигатели постоянного тока, когда требуются большие изменения скорости.
Давайте разберемся в конструкции трехфазного асинхронного двигателя, прежде чем изучать принцип работы.
Содержание
Конструкция трехфазного асинхронного двигателя
Как и любой электродвигатель, трехфазный асинхронный двигатель имеет статор и ротор . Статор имеет трехфазную обмотку (называемую обмоткой статора), а ротор несет 9-фазную обмотку.0021 короткозамкнутая обмотка (так называемая обмотка ротора).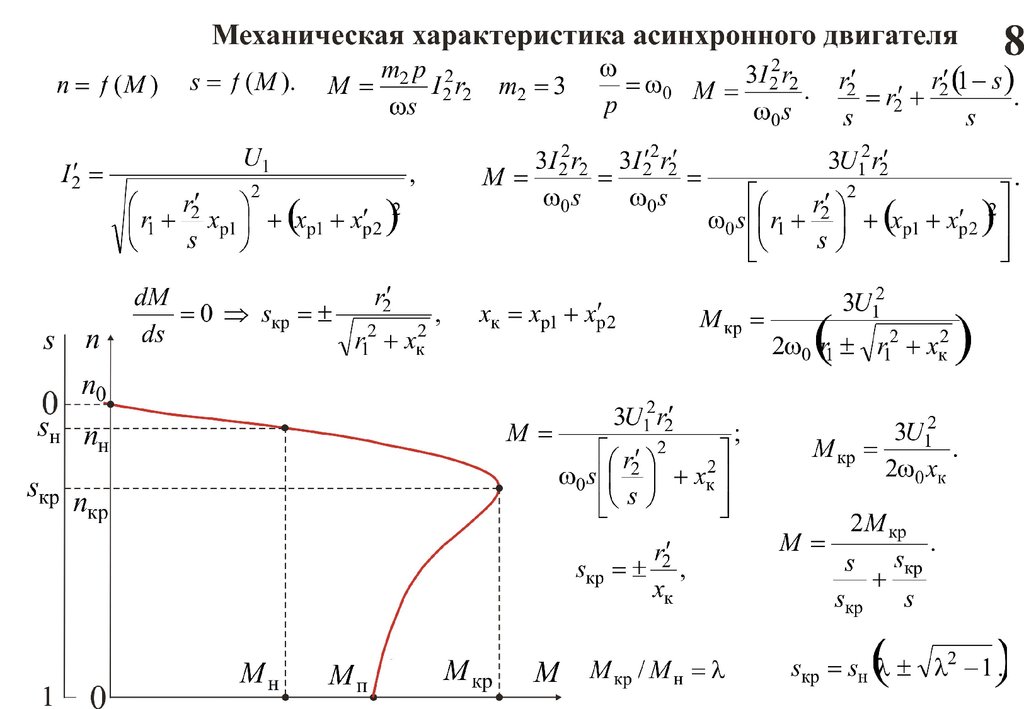
От трехфазного источника питания питается только обмотка статора. Обмотка ротора получает свое напряжение и мощность от обмотки статора с внешним питанием через электромагнитную индукцию и, следовательно, название.
Трехфазный асинхронный двигатель состоит из двух основных частей
- Статор
- Ротор
Ротор отделен от статора небольшим воздушным зазором , который колеблется от 0,4 мм до 4 мм, в зависимости от мощности двигателя.
1. Статор трехфазного асинхронного двигателя
Статор состоит из стальной рамы, в которую заключен полый цилиндрический сердечник, состоящий из тонких пластин из кремнистой стали для уменьшения потерь на гистерезис и вихревых токов.
Ряд равномерно расположенных пазов предусмотрен на внутренней периферии пластин. Изолированные жилы соединены в симметричную трехфазную схему, соединенную звездой или треугольником.
Внешний корпус и статор трехфазного асинхронного двигателя
Обмотка трехфазного статора намотана на определенное количество полюсов в соответствии с требованием скорости. Чем больше число полюсов, тем меньше скорость двигателя и наоборот.
Когда на обмотку статора подается трехфазное питание, создается вращающееся магнитное поле постоянной величины. Это вращающееся поле индуцирует токи в роторе за счет электромагнитной индукции.
2. Ротор трехфазного асинхронного двигателя
Ротор, установленный на валу, представляет собой полый многослойный сердечник с прорезями на внешней периферии. Обмотка, размещенная в этих пазах (называемая обмоткой ротора), может быть одного из следующих двух типов:
- Тип с короткозамкнутым ротором
- Ротор с обмоткой Тип
Принцип работы Трехфазный асинхронный двигатель
Для объяснения принципа работы трехфазного асинхронного двигателя рассмотрим часть трехфазного асинхронного двигателя, как показано на рисунке.
Работа трехфазного асинхронного двигателя основана на принципе электромагнитной индукции.
Когда трехфазная обмотка статора асинхронного двигателя питается от трехфазного источника питания, создается вращающееся магнитное поле , которое вращается вокруг статора с синхронной скоростью (N s ).
Часть вращающегося магнитного поля в трехфазном асинхронном двигателе
Синхронная скорость,
Н с = 120 f/P
Где,
f = частота
P = количество полюсов
(Для получения дополнительной информации о вращающемся магнитном поле см. Создание вращающегося магнитного поля).
Это вращающееся поле проходит через воздушный зазор и разрезает неподвижные проводники ротора.
ЭДС индуцируется в каждом проводнике ротора из-за относительной скорости между вращающимся магнитным потоком и неподвижным ротором. Поскольку цепь ротора закорочена, в проводниках ротора начинают протекать токи.
Токонесущие проводники ротора помещаются в магнитное поле, создаваемое статором. Следовательно, на проводники ротора действует механическая сила . Сумма механических сил, действующих на все проводники ротора, создает крутящий момент , который стремится сдвинуть ротор в том же направлении, что и вращающееся поле.
Тот факт, что ротор вынужден следовать за полем статора (т. е. ротор движется в направлении поля статора), можно объяснить законом Ленца .
Согласно закону Ленца направление токов ротора будет таким, что они будут иметь тенденцию противодействовать причине их возникновения.
Теперь причиной возникновения токов ротора является относительная скорость между вращающимся полем и неподвижными проводниками ротора.
Следовательно, чтобы уменьшить эту относительную скорость, ротор начинает двигаться в том же направлении, что и поле статора, и пытается его поймать. Так начинает работать трехфазный асинхронный двигатель.