Ослабление — магнитный поток — двигатель
Cтраница 1
| Скоростные харак — возбуждения И магнитный поток, теристики двигателя парад — который определится по кривой на-лельного возбуждения при магничивания ослаблении потока.
[1] |
Ослабление магнитного потока двигателя достигается включением реостата РВ в цепь обмотки возбуждения ( см. рис. 2.1) и применяется для регулирования скорости двигателя выше основной.
[2]
Ослабление магнитного потока двигателей допускается при наладке устанавливать до 50 % номинального.
[3]
Тогда ослабление магнитного потока двигателя будет происходить лишь в допустимых пределах, обычно в 2 — 3 раза против номинальной величины.
[4]
| Схемы включения двигателей, обеспечивающие работу их с ослабленным магнитным потоком.
[5] |
Для ослабления магнитного потока двигателя независимого возбуждения в цепь обмотки возбуждения включается реостат.
[6]
Регулирование скорости в зоне ослабления магнитного потока двигателя при питании его якоря от отдельного генератора не отличаются от случая питания двигателя от сети, лишь наклон характеристик в системе Г — Д при ФФН соответственно становится большим.
[7]
Для автоматического поддержания постоянства скорости при ослаблении магнитного потока двигателя ( когда ее значение выше номинальной скорости двигателя) на управляющую обмотку 4Wi подается разность задающего напряжения и напряжения, снимаемого с зажимов якоря двигателя.
[8]
Регулирование скорости от пн до гаах производится ослаблением магнитного потока двигателя.
[9]
| Диски электромагнитной фрикционной муфты.
[10] |
Пуск двигателя до скорости выше основной осуществляется ослаблением магнитного потока двигателя. Если наибольшая скорость, до которой разгоняется двигатель, превышает номинальную в 3 или 4 раза, то ускорение от основной скорости до наибольшей должно производиться в несколько ступеней с целью ограничения тока якорной цепи.
[11]
| Функциональная схема управления вентильным электродвигателем бурового насоса.
[12] |
В некоторых электроприводах буровых насосов регулирование скорости осуществляется ослаблением магнитного потока двигателя. В этом случае в цепь обмотки возбуждения двигателя LM включается устройство регулирования тока возбуждения.
[13]
Наиболее просто можно регулировать скорость двигателей постоянного тока с параллельным возбуждением путем ослабления магнитного потока двигателя. Диапазон регулирования достигает ( 3 — 5): 1 при Р const. Этот способ удобен при наличии в цехе машиностроительного завода сети постоянного тока, а также если несколько станков, требующих плавного регулирования скорости, устанавливаются рядом. В последнем случае возможно поставить одну общую преобразовательную установку переменного тока в постоянный для питания двигателей этих станков. Кроме того, могут создаваться компактные выпрямительные устройства с силовыми кремниевыми вентилями и встраиваться в станки для питания отдельных двигателей постоянного тока.
Кроме того, могут создаваться компактные выпрямительные устройства с силовыми кремниевыми вентилями и встраиваться в станки для питания отдельных двигателей постоянного тока.
[14]
В последних пропусках для уменьшения времени прокатки может оказаться целесообразным увеличить скорость путем ослабления магнитного потока двигателя.
[15]
Страницы:
1
2
3
4
Электрические машины — Учебник
Электрические машины — Учебник
Все журналы по электротехнике и электрике а также Радиолюбительские журналы Радио, Схемотехника, Радиохобби, Радиомотор,и другие скачиваем здесь:
5.3 Двигатель параллельного возбуждения (шунтовой)
Рисунок
58 Двигатель параллельного
возбуждения
Характерной особенностью этого
двигателя является то, что ток возбуждения
Iв не зависит от нагрузки (тока
якоря).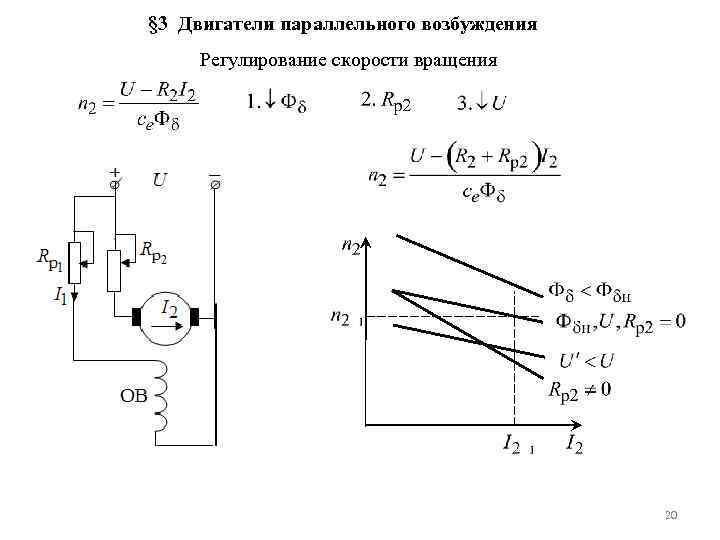
|
I= Iа+ Iв |
|
Реостат в цепи возбуждения rрг
служит для регулирования тока возбуждения
Iв, а следовательно
магнитного потока главных полюсов.
Эксплуатационные свойства двигателя
определяются его рабочими
характеристиками, которые снимают при U=const
и Iв=const.
1) Скоростная характеристика
Это зависимость частоты вращения от
полезной мощности n=f(P2).
Чтобы понять, как будет меняться частота
вращения ДПТ параллельного возбуждения
при увеличении на него нагрузки, обратимся
к формуле частоты вращения
,
из которой видно, что при неизменном
напряжении U на
частоту вращения влияют два фактора:
— при увеличении нагрузки растет ток
якоря, следовательно, растет падение
напряжения в цепи якоря IаRa
и числитель уменьшается;
— из-за размагничивающего влияния реакции
якоря уменьшается основной
магнитный поток Ф.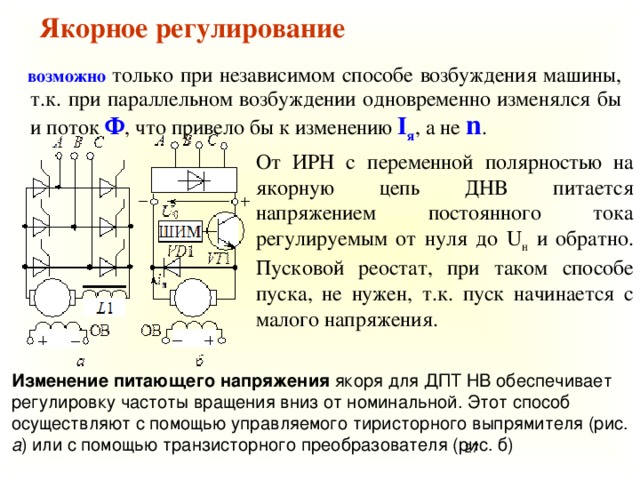
Обычно ослабление потока Ф
невелико и увеличение IаRa
влияет на частоту вращения сильнее.
В итоге при увеличении нагрузки частота
вращения уменьшается, а график n=f(P2)
имеет вид:
Рисунок
59 Скоростная характеристика ДПТ
параллельного возбуждения
Жесткость
скоростной характеристики оценивается номинальным
изменением частоты вращения Δnном.
|
| (6) | |
| где | n0 – частота вращения
двигателя в режиме х.х.; |
|
|
nном — частота вращения двигателя в номинальном режиме. 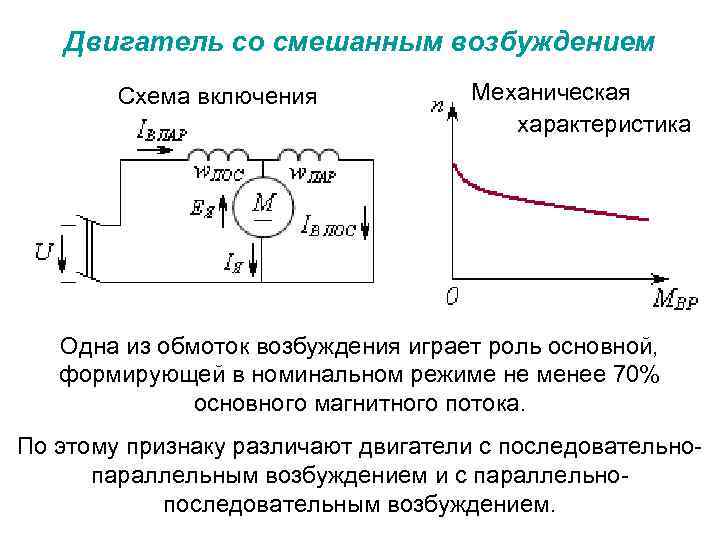 |
|
Обычно для ДПТ параллельного
возбуждения Δnном=2
÷ 8%,
поэтому скоростную характеристику этого
двигателя называют жесткой.
2) Зависимость полезного момента М2
от нагрузки М2=f(P2)
Эта зависимость установлена формулой:
|
М2=9,56
| (7) |
При n=const график М2=f(P2)
имел бы вид прямой, но при увеличении
нагрузки частота вращения двигателя
снижается и график приобретает
криволинейный вид.
Рисунок
60 Зависимость нагрузочного момента
ДПТ параллельного возбуждения от полезной мощности
3) Зависимость электромагнитного момента
М от нагрузки М=f(P2)
При n=const вращающий момент
двигателя М=М0+М2. Так
Так
как рабочие характеристики двигателя
снимают при условии Iв=const ,
то момент х.х. М0=const.
Поэтому график зависимости М=f(P2)
проходит параллельно кривой М2=f(P2).
Рисунок
61 Зависимость электромагнитного
момента ДПТ параллельного возбуждения от полезной мощности
Если принять поток Ф=const, то
график М=f(P2) является в
тоже время выражением зависимости I=f(P2),
так как М=См·Ф·Iа
Механическая характеристика
Это зависимость частоты вращения от
электромагнитного момента n=f(М)
Для получения аналитического выражения n=f(М)
преобразуем формулу частоты вращения
|
|
|
подставив в него значение тока якоря Ia=M/(Cмф)
получим
|
|
(8)
| |
| где |
n0-частота вращения в режиме х.
| |
|
|
 х.;
х.;Если пренебречь реакцией якоря,
то естественная механическая
характеристика ДПТ параллельного
возбуждения будет иметь вид
Рисунок
62 Механическая характеристика ДПТ
параллельного возбуждения
Если увеличить добавочное сопротивление rд,
включенное в цепь якоря, то жесткость
механической характеристики будет
уменьшаться. Это видно из формулы (8), т.к. n0
останется неизменной, а
Δn
увеличится.
Рисунок
62.1 Механическая характеристика ДПТ
параллельного возбуждения
Вид механической характеристики так же
зависит от величины основного магнитного
потока Ф.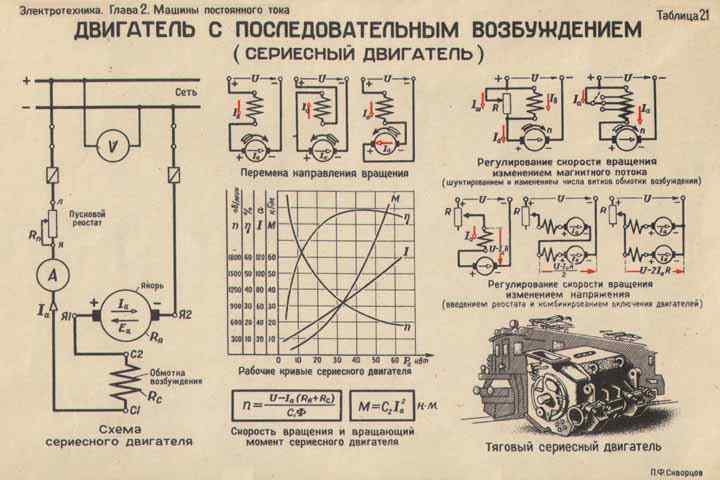 Так при уменьшении
Так при уменьшении
Ф
увеличивается частота вращения х.х. n0
и одновременно увеличивается
Δn. Это
приводит к резкому уменьшению жесткости
характеристики.
Рисунок
62.2 Механическая характеристика ДПТ
параллельного возбуждения
При изменении напряжения подаваемого в
обмотку якоря меняется только n0,
а
Δn. остается постоянным, так как не
зависит от напряжения.
Рисунок
62.3 Механическая характеристика ДПТ
параллельного возбуждения
Регулирование частоты вращения
двигателя параллельного возбуждения
Способы регулирования частоты вращения
оцениваются следующими показателями:
— плавностью регулирования;
— диапазоном регулирования, определяемым
отношением наибольшей частоты вращения к
наименьшей;
— экономичностью регулирования,
определяемой стоимостью регулировочной
аппаратуры и потерями энергии в ней.
Из формулы
видно, что регулировать частоту вращения
двигателя можно тремя способами:
— изменением сопротивления цепи якоря Rа;
— изменением величины магнитного потока Ф;
— изменением напряжения U
подаваемого на двигатель.
Рассмотрим подробнее эти способы.
а) Изменение сопротивления цепи якоря
Для этого последовательно в цепь якоря
включают регулировочный реостат,
рассчитанный на длительное протекание по
нему тока, в отличие от пускового реостата.
При увеличении сопротивления цепи якоря
возрастает
Δn,
что ведет к уменьшению частоты вращения,
при этом жесткость механической
характеристики уменьшается.
Рисунок
62.4 Механическая характеристика ДПТ
параллельного возбуждения
Этот способ обеспечивает
плавное регулирование в широком диапазоне,
но только в сторону уменьшения от номинальной
частоты. Но он неэкономичен из-за
Но он неэкономичен из-за
значительных потерь электроэнергии в
регулировочном реостате, которые
интенсивно растут с увеличением мощности
двигателя.
б) Изменение основного магнитного потока
Для изменения магнитного потока Ф
в цепь обмотки возбуждения включают
регулировочный реостат rрг.
При
увеличении сопротивления реостата
уменьшается ток возбуждения Iв
и, следовательно уменьшается магнитный
поток Ф, а частота вращения
увеличивается и наоборот.
|
|
|
При изменении магнитного потока Ф
меняется жесткость механической
характеристики, так как меняются и n0
и
Δn.
Рисунок
62.5 Механическая характеристика ДПТ
параллельного возбуждения
Рассмотренный способ
регулирования частоты вращения прост и
экономичен, так как в ДПТ параллельного
возбуждения ток Iв=(0,01
÷ 0,07)Iа ном,
а поэтому потери в регулировочном
реостате невелики.
Но диапазон регулирования
невелик. Объясняется это тем, что нижний
предел частоты обусловлен насыщением
машины, ограничивающим значение
магнитного потока Ф,
а верхний предел частоты – опасностью «разноса»
двигателя и усилением
влияния реакции якоря, искажающее
действие которого при ослаблении
основного магнитного потока Ф
усиливается и
ведет к искрению и круговому
огню на коллекторе.
в) Изменение напряжения в цепи якоря
Этот способ применяется только при Iв=const,
т.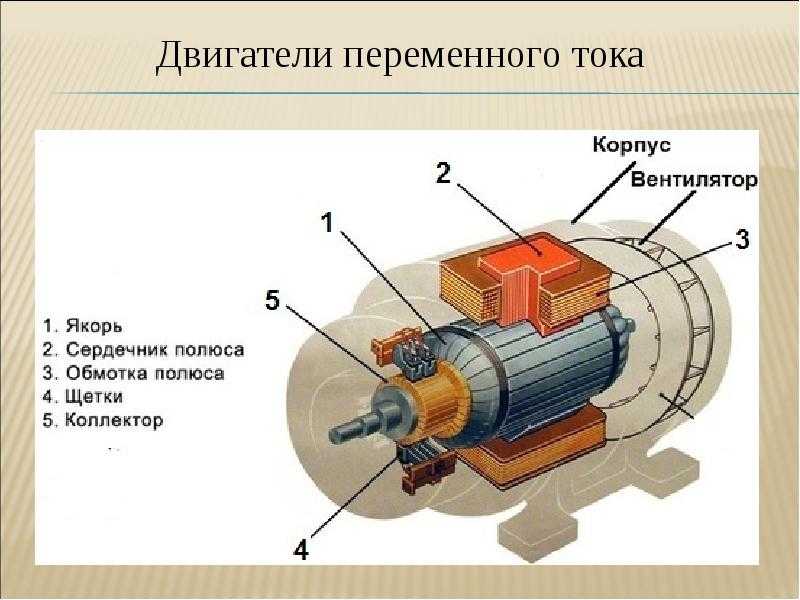 е. при раздельном питании цепей обмотки
е. при раздельном питании цепей обмотки
якоря и обмотки возбуждения.
При изменении напряжения U
меняется только частота вращения х.х. n0,
а жесткость механической
характеристики остается постоянной, так
как
Δn от напряжения не зависит.
Рисунок
62.6 Механическая характеристика ДПТ
параллельного возбуждения
Для регулирования двигателей малой и
средней мощности в качестве регулятора
напряжения применяют регулируемые
выпрямители, а для двигателей большой
мощности – ГПТ независимого возбуждения.
Способ обеспечивает плавное
экономичное регулирование в широком
диапазоне. Наибольшая частота вращения
ограничивается условиями коммутации (при
↑U⇒ ↑Iа),
а наименьшая – условиями охлаждения
двигателя.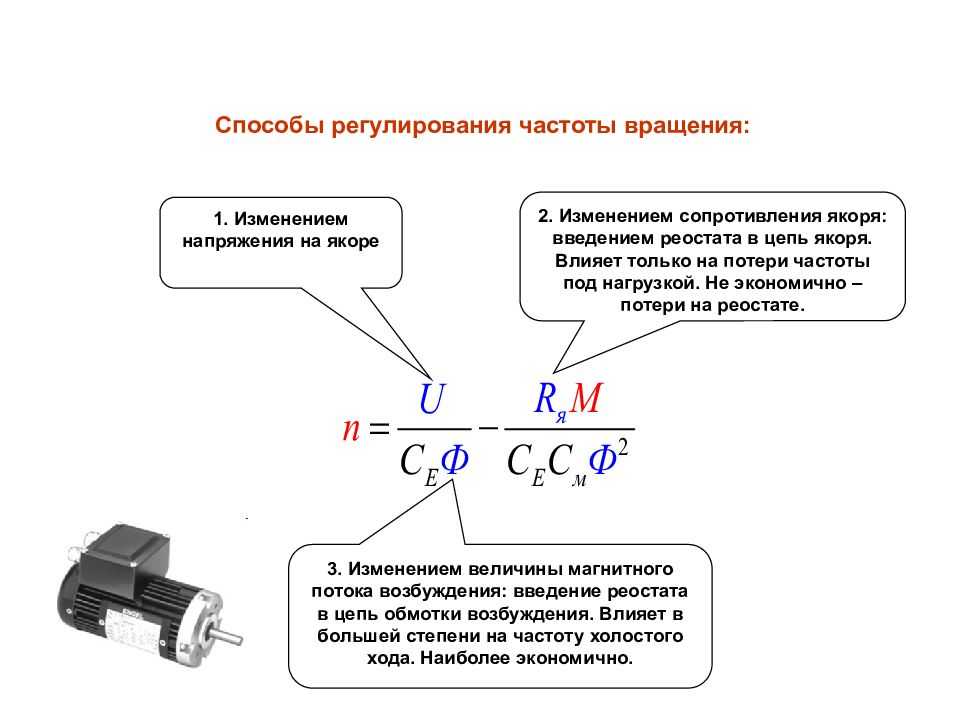
Еще одним достоинством этого
способа является то, что он допускает
безреостатный пуск двигателя при
пониженном напряжении.
Применение ДПТ параллельного
возбуждения
Эти двигатели применяют в приводах
вентиляторов, станков, а также в других
случаях регулируемого электропривода, где
требуется устойчивая работа при
колебаниях нагрузки, так как они имеют
жесткие механические характеристики и
возможность плавного регулирования
частоты вращения в широком диапазоне.
Внедрение двигателя постоянного тока — щеточный двигатель, бесщеточный, редуктор, коробка передач — Zhejiang Zhengke Electromotor Co., Ltd
03.11.2022 09:28:45
администратор
Двигатели постоянного тока — это двигатели, работающие от постоянного напряжения, которые широко используются в магнитофонах, видеомагнитофонах, DVD-плеерах, электробритвах, фенах, электронных часах, игрушках и т. д.
д.
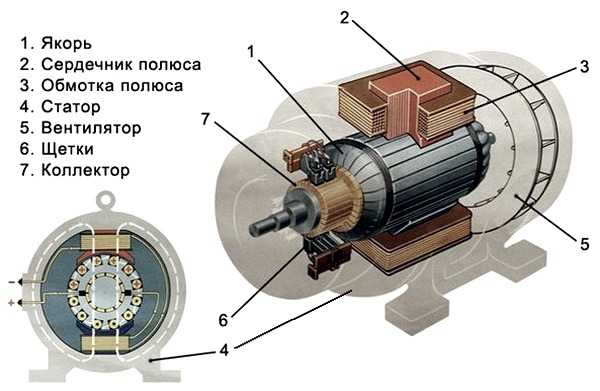
1. Электромагнитный двигатель постоянного тока состоит из магнитного полюса статора, ротора (якоря), коммутатора (обычно известного как коммутатор), щетки, корпуса, подшипника и т. д. Магнитный полюс статора (основной магнитный полюс) электромагнитного двигателя постоянного тока. состоит из железного сердечника и обмотки возбуждения. В соответствии с различными способами возбуждения (старый стандарт называется возбуждением), его можно разделить на двигатели постоянного тока с последовательным возбуждением, двигатели постоянного тока с параллельным возбуждением, двигатели постоянного тока с раздельным возбуждением и двигатели постоянного тока со смешанным возбуждением. Из-за различных методов возбуждения законы магнитного потока полюса статора (созданного катушкой возбуждения полюса статора после подачи питания) также различны.
2. Обмотка возбуждения и обмотка ротора двигателя постоянного тока с последовательным возбуждением соединены последовательно через щетки и коллекторы.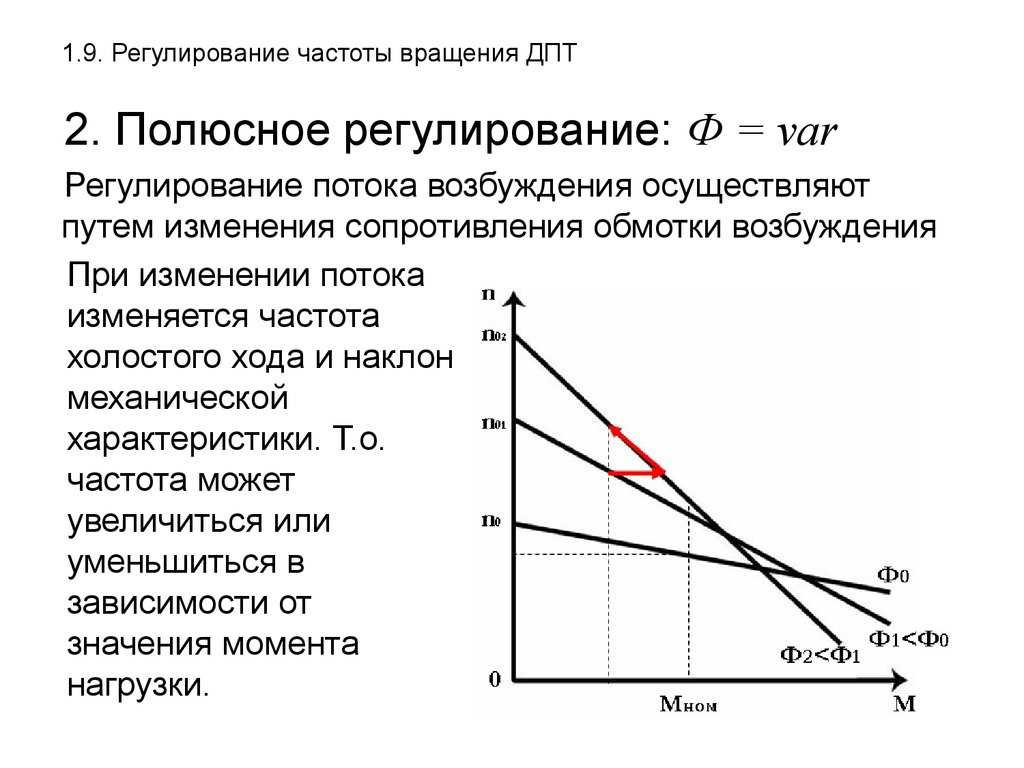 Ток возбуждения пропорционален току якоря. Магнитный поток статора увеличивается с увеличением тока возбуждения, а крутящий момент примерно равен электрическому току. Ток поворота пропорционален квадрату, и скорость быстро уменьшается с увеличением крутящего момента или тока. Пусковой крутящий момент может превышать номинальный крутящий момент более чем в 5 раз, момент кратковременной перегрузки может превышать номинальный крутящий момент более чем в 4 раза, скорость изменения скорости велика, а скорость холостого хода очень высока. (Как правило, не разрешается работать без нагрузки). Регулирование скорости может быть достигнуто с помощью внешнего резистора, включенного последовательно (или параллельно) с последовательной обмоткой, или путем включения последовательной обмотки параллельно.
Ток возбуждения пропорционален току якоря. Магнитный поток статора увеличивается с увеличением тока возбуждения, а крутящий момент примерно равен электрическому току. Ток поворота пропорционален квадрату, и скорость быстро уменьшается с увеличением крутящего момента или тока. Пусковой крутящий момент может превышать номинальный крутящий момент более чем в 5 раз, момент кратковременной перегрузки может превышать номинальный крутящий момент более чем в 4 раза, скорость изменения скорости велика, а скорость холостого хода очень высока. (Как правило, не разрешается работать без нагрузки). Регулирование скорости может быть достигнуто с помощью внешнего резистора, включенного последовательно (или параллельно) с последовательной обмоткой, или путем включения последовательной обмотки параллельно.
3. Обмотка возбуждения шунтирующего двигателя постоянного тока подключена параллельно обмотке ротора, ток возбуждения относительно постоянен, пусковой момент пропорционален току якоря, а пусковой ток примерно в 2,5 раза превышает номинальный ток.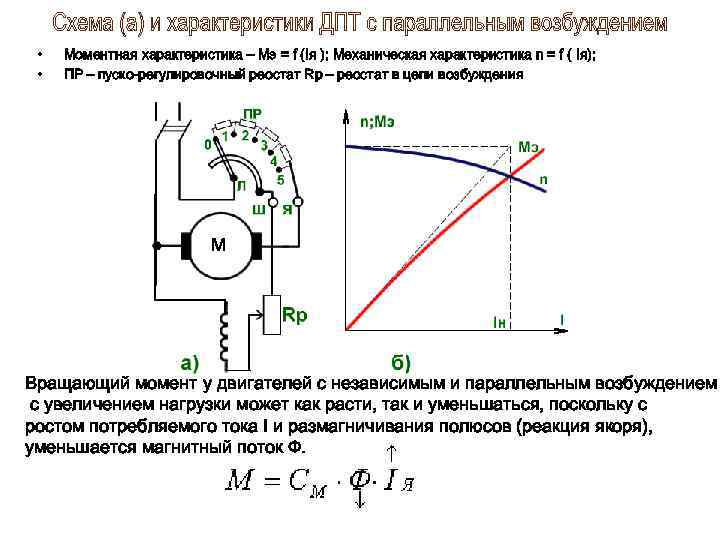 Скорость немного уменьшается с увеличением тока и крутящего момента, а кратковременный перегрузочный момент в 1,5 раза превышает номинальный крутящий момент. Скорость изменения скорости небольшая, 5%~15%. Скорость можно регулировать постоянной мощностью, ослабляющей магнитное поле.
Скорость немного уменьшается с увеличением тока и крутящего момента, а кратковременный перегрузочный момент в 1,5 раза превышает номинальный крутящий момент. Скорость изменения скорости небольшая, 5%~15%. Скорость можно регулировать постоянной мощностью, ослабляющей магнитное поле.
4. Обмотка возбуждения двигателя постоянного тока с независимым возбуждением подключена к независимому источнику питания возбуждения, и его ток возбуждения относительно постоянен, а пусковой момент пропорционален току якоря. Изменение скорости также составляет 5%~15%. Скорость вращения можно увеличить, ослабив постоянную мощность поля или уменьшив напряжение обмоток ротора.
5. В дополнение к шунтирующим обмоткам полюса статора двигателей постоянного тока со смешанным возбуждением снабжены обмотками последовательного возбуждения (с меньшим числом витков), включенными последовательно с обмотками ротора. Направление магнитного потока, создаваемого последовательной обмоткой, такое же, как и у основной обмотки, пусковой крутящий момент примерно в 4 раза превышает номинальный крутящий момент, а момент кратковременной перегрузки примерно в 3,5 раза превышает номинальный крутящий момент.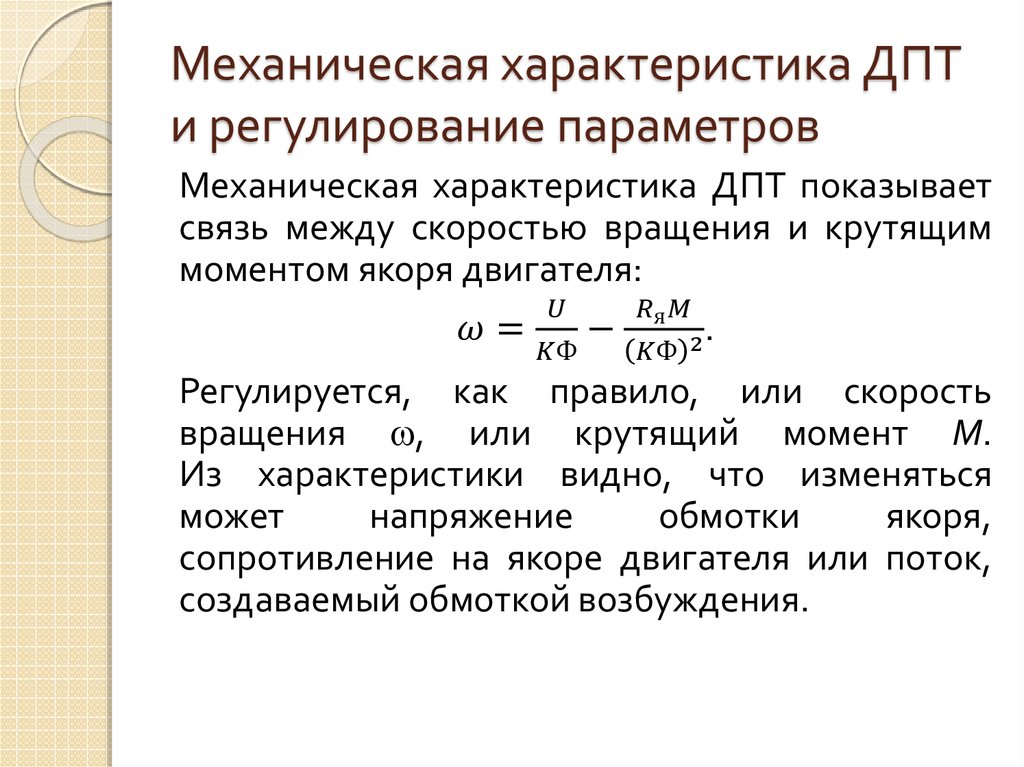 Скорость изменения скорости составляет 25%~30% (относительно последовательной обмотки). Скорость вращения можно регулировать, ослабляя напряженность магнитного поля.
Скорость изменения скорости составляет 25%~30% (относительно последовательной обмотки). Скорость вращения можно регулировать, ослабляя напряженность магнитного поля.
6. Сегмент коммутатора изготовлен из легированных материалов, таких как серебряная медь и кадмиевая медь, и отлит из высокопрочного пластика. Щетки находятся в скользящем контакте с коллектором для подачи тока якоря к обмоткам ротора. В щетках электромагнитных двигателей постоянного тока обычно используются металлические графитовые щетки или электрохимические графитовые щетки. Железный сердечник ротора изготовлен из ламинированных листов кремнистой стали, как правило, с 12 пазами и 12 наборами встроенных обмоток якоря.
Поделись с:
Понимание двигателей с постоянными магнитами | Техника управления
Управление скоростью двигателей переменного тока в большинстве случаев осуществляется с помощью частотно-регулируемого привода (ЧРП).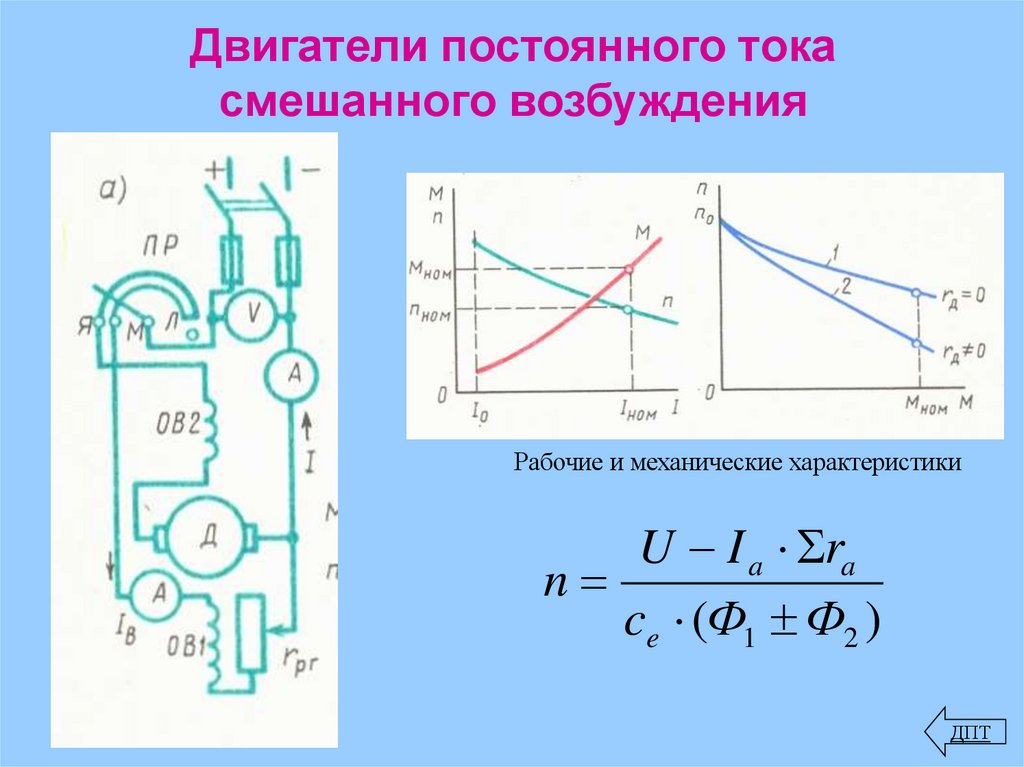 Хотя многие сценарии предполагают использование частотно-регулируемых приводов с асинхронными двигателями с обмотками статора для создания вращающегося магнитного поля, они также могут обеспечить точное управление скоростью, используя датчики обратной связи по скорости или положению в качестве эталона для частотно-регулируемого привода.
Хотя многие сценарии предполагают использование частотно-регулируемых приводов с асинхронными двигателями с обмотками статора для создания вращающегося магнитного поля, они также могут обеспечить точное управление скоростью, используя датчики обратной связи по скорости или положению в качестве эталона для частотно-регулируемого привода.
В некоторых ситуациях можно получить сравнительно точное управление скоростью без использования датчиков обратной связи. Это стало возможным благодаря двигателю с постоянными магнитами (PM) и процессу, называемому «метод подачи высокочастотного сигнала».
Асинхронные машины
Асинхронная машина переменного тока (АД) также обычно называется двигателем переменного тока. Вращающееся поле создается обмоткой статора. Вращающееся поле индуцирует ток в стержнях ротора. Генерация тока требует разницы скоростей между ротором и магнитным полем. Взаимодействие между полем и током создает движущую силу. Поэтому асинхронные машины переменного тока являются преобладающими двигателями, управляемыми приводами с регулируемой скоростью.
Двигатели с постоянными магнитами
Двигатель с постоянными магнитами — это двигатель переменного тока, в котором используются магниты, встроенные или прикрепленные к поверхности ротора двигателя. Магниты используются для создания постоянного потока двигателя вместо того, чтобы требовать, чтобы поле статора генерировало его путем связи с ротором, как в случае с асинхронным двигателем. Четвертый двигатель, известный как двигатель с постоянными магнитами с линейным пуском (LSPM), сочетает в себе характеристики обоих двигателей. Двигатель LSPM включает в себя магниты двигателя с постоянными магнитами внутри ротора и стержни ротора двигателя с короткозамкнутым ротором, чтобы максимизировать крутящий момент и эффективность (см. Таблицу 1).
Поток, потокосцепление и магнитный поток
Чтобы понять работу двигателей с постоянными магнитами, важно сначала понять понятия магнитного потока, потокосцепления и магнитного потока.
Поток: Поток тока через проводник создает магнитное поле. Поток определяет скорость потока свойства на единицу площади. Ток потока — это скорость тока, протекающего через заданную площадь поперечного сечения проводника.
Поток определяет скорость потока свойства на единицу площади. Ток потока — это скорость тока, протекающего через заданную площадь поперечного сечения проводника.
Потокосцепление: Потокосцепление возникает, когда магнитное поле взаимодействует с материалом, как это происходит, когда магнитное поле проходит через катушку провода. Потокосцепление определяется количеством витков и потоком, где ϕ используется для обозначения мгновенного значения изменяющегося во времени потока. Потокосцепление определяется следующим уравнением:
Магнитный поток: Магнитный поток определяется как скорость магнитного поля, протекающего через заданную площадь поперечного сечения проводника. Поле магнитного потока создается постоянным магнитом внутри или на поверхности двигателя с постоянными магнитами.
Катушка индуктивности: Катушка индуктивности представляет собой элемент цепи, состоящий из проводящего провода, обычно в форме катушки.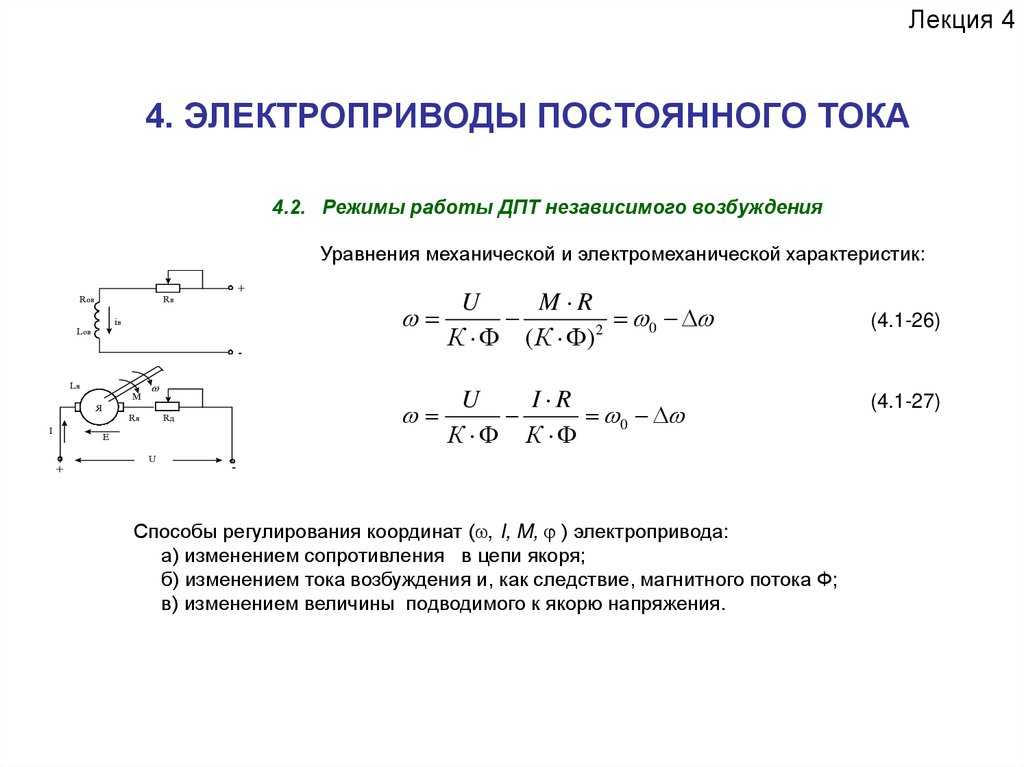 Проводник, по которому течет постоянный ток, будет генерировать постоянное магнитное поле. Можно показать, что магнитное поле и ток, который его создал, связаны линейной зависимостью. Изменение магнитного поля индуцирует напряжение в близлежащем проводнике, пропорциональное скорости изменения тока, создавшего магнитное поле. Напряжение в проводнике определяется следующим уравнением:
Проводник, по которому течет постоянный ток, будет генерировать постоянное магнитное поле. Можно показать, что магнитное поле и ток, который его создал, связаны линейной зависимостью. Изменение магнитного поля индуцирует напряжение в близлежащем проводнике, пропорциональное скорости изменения тока, создавшего магнитное поле. Напряжение в проводнике определяется следующим уравнением:
Индуктивность: Индуктивность (L) — это константа пропорциональности, которая определяет отношение между напряжениями, индуцированными скоростью изменения тока, создающего магнитное поле. Проще говоря, индуктивность — это потокосцепление на единицу тока. Следует пояснить, что индуктивность является пассивным элементом и является чисто геометрическим свойством. Индуктивность измеряется в Генри (Гн) или вебер-витках на ампер.
Ось d и ось q: В геометрических терминах оси «d» и «q» представляют собой однофазные представления потока, вносимого тремя отдельными синусоидальными фазовыми величинами при одной и той же угловой скорости. Ось d, также известная как прямая ось, представляет собой ось, по которой поток создается обмоткой возбуждения. Ось q или квадратурная ось — это ось, на которой создается крутящий момент. По соглашению, квадратурная ось всегда электрически опережает прямую ось на 90 градусов. Проще говоря, ось d является основным направлением потока, а ось q является основным направлением создания крутящего момента.
Ось d, также известная как прямая ось, представляет собой ось, по которой поток создается обмоткой возбуждения. Ось q или квадратурная ось — это ось, на которой создается крутящий момент. По соглашению, квадратурная ось всегда электрически опережает прямую ось на 90 градусов. Проще говоря, ось d является основным направлением потока, а ось q является основным направлением создания крутящего момента.
Магнитная проницаемость: В электромагнетизме проницаемость — это мера способности материала поддерживать формирование магнитного поля внутри себя. Следовательно, это степень намагниченности, которую материал приобретает в ответ на приложенное магнитное поле.
Эквивалентная схема двигателя с постоянными магнитами: Двигатель с постоянными магнитами может быть представлен несколькими различными моделями двигателей. Одним из наиболее распространенных методов является модель двигателя d-q.
Индуктивность двигателя с постоянными магнитами по осям d и q: Индуктивности по осям d и q представляют собой индуктивности, измеряемые при прохождении потока через ротор относительно магнитного полюса.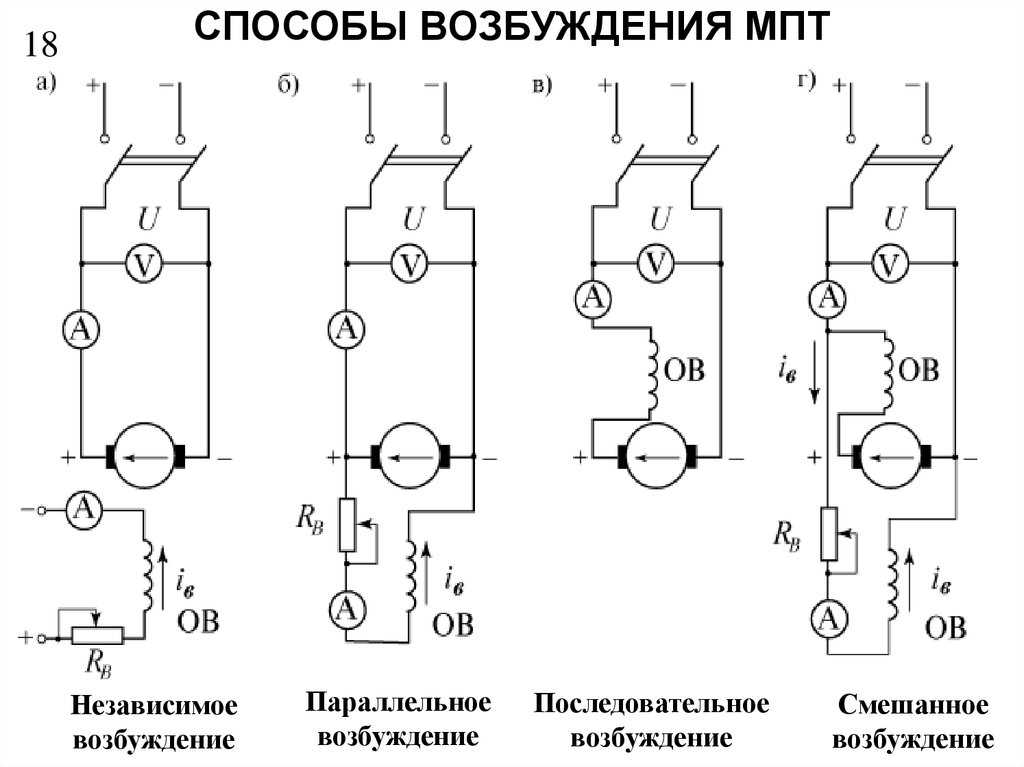 Индуктивность по оси d представляет собой индуктивность, измеренную при прохождении потока через магнитные полюса. Индуктивность по оси q является мерой индуктивности, когда поток проходит между магнитными полюсами.
Индуктивность по оси d представляет собой индуктивность, измеренную при прохождении потока через магнитные полюса. Индуктивность по оси q является мерой индуктивности, когда поток проходит между магнитными полюсами.
В асинхронной машине потокосцепление ротора будет одинаковым между осью d и осью q. Однако в машине с постоянным магнитом магнит уменьшает доступное железо для потокосцепления. Проницаемость магнита близка к воздухопроницаемости. Поэтому магнит можно рассматривать как воздушный зазор. Магнит находится на пути потока, когда он проходит через ось d. Путь потока, проходящий через ось q, не пересекает магнит. Следовательно, больше железа может быть связано с путем потока по оси q, что приводит к большей индуктивности. Двигатель со встроенным магнитом будет иметь большую индуктивность по оси q, чем индуктивность по оси d. Двигатель с магнитами для поверхностного монтажа будет иметь почти одинаковые индуктивности по осям q и d, потому что магниты находятся вне ротора и не ограничивают количество железа, связанного полем статора.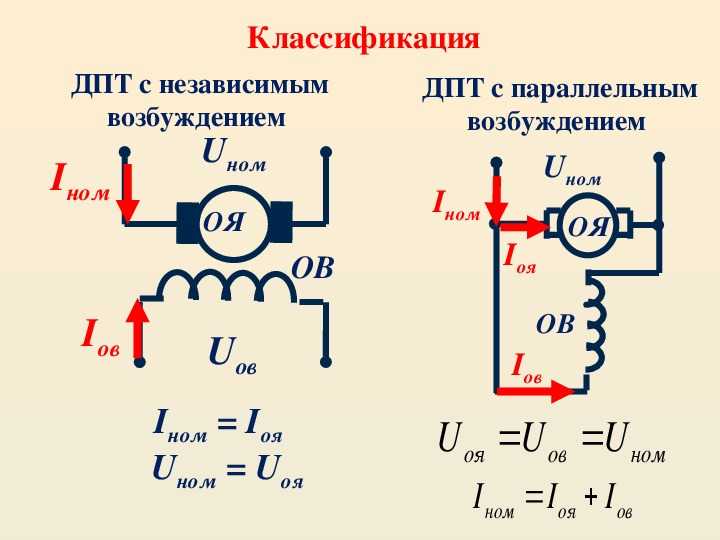
Магнитная заметность: Важность или значимость — это состояние или качество, благодаря которому что-то выделяется по сравнению с соседями. Магнитная заметность описывает взаимосвязь между индуктивностью основного потока ротора (ось d) и индуктивностью основного потока (ось q). Магнитная заметность изменяется в зависимости от положения ротора по отношению к полю статора, где максимальная заметность возникает при 90 электрических градусах от оси основного потока (ось d) (см. Рисунок 1).
Ток возбуждения: Ток возбуждения — это «ток в обмотках статора, необходимый для создания магнитного потока в сердечнике ротора». В машинах с постоянными магнитами не требуется ток возбуждения в обмотке статора, потому что магниты двигателя с постоянными магнитами уже создают постоянное магнитное поле.
Вторичный ток: Вторичный ток, также известный как «ток, создающий крутящий момент», представляет собой ток, необходимый для создания крутящего момента двигателя. В машине с постоянными магнитами токи, создающие крутящий момент, составляют большую часть потребляемого тока.
В машине с постоянными магнитами токи, создающие крутящий момент, составляют большую часть потребляемого тока.
Втягивающий ток: В отличие от согласованного набора усилителя и сервопривода, предназначенного для управления движением, обычный ЧРП не имеет информации о положении магнитного полюса ротора двигателя. Без знания положения магнитного полюса в статоре невозможно создать поле для максимального создания крутящего момента. Таким образом, частотно-регулируемый привод может обеспечивать постоянное напряжение, чтобы зафиксировать магнитное поле в известном положении. Потребляемый ток, необходимый для втягивания ротора, называется «ток втягивания».
Высокочастотная инжекция: Высокочастотная инжекция — это метод инвертора, используемый для определения положения магнитного полюса двигателя с постоянными магнитами. Метод начинается с того, что инвертор подает высокочастотный низковольтный сигнал в двигатель на произвольной оси. Затем инвертор меняет угол возбуждения и контролирует ток.
В зависимости от угла впрыска сопротивление ротора меняется. Импеданс клемм двигателя с внутренними постоянными магнитами (IPM) уменьшается, когда ось подачи высокочастотного сигнала и ось магнитного полюса (ось d) совпадают, т. е. при 0 град. Импеданс максимален при ±90 град. Используя эту характеристику, привод может определять положение ротора без импульсных энкодеров, подавая высокочастотное переменное напряжение/ток на двигатель IPM. Кроме того, метод подачи высокочастотного сигнала можно использовать для определения скорости в области низких скоростей, где обычно управление крутящим моментом при полной нагрузке очень затруднено из-за слишком низкого уровня напряжения противо-ЭДС двигателя.
Форма сигнала обратной ЭДС
ПротивоЭДС — это сокращение от противоэлектродвижущей силы, но также известное как противоэлектродвижущая сила. Обратная электродвижущая сила — это напряжение, возникающее в электродвигателях при относительном движении между обмотками статора и магнитным полем ротора. Геометрические свойства ротора определяют форму волны обратной ЭДС. Эти формы волны могут быть синусоидальными, трапециевидными, треугольными или чем-то средним между ними.
И асинхронные машины, и машины с постоянными магнитами генерируют сигналы обратной ЭДС. В асинхронной машине форма волны обратной ЭДС будет затухать по мере медленного затухания остаточного поля ротора из-за отсутствия поля статора. Однако в машине с ПМ ротор генерирует собственное магнитное поле. Следовательно, в обмотках статора может индуцироваться напряжение всякий раз, когда ротор находится в движении. Напряжение противо-ЭДС будет расти линейно со скоростью и является решающим фактором при определении максимальной рабочей скорости.
Понимание крутящего момента машины с постоянными магнитами
Крутящий момент электрической машины можно разбить на две составляющие: магнитный крутящий момент и реактивный крутящий момент. Момент сопротивления — это «сила, действующая на магнитный материал, которая стремится выровняться с основным потоком, чтобы минимизировать сопротивление». Другими словами, реактивный крутящий момент — это крутящий момент, создаваемый выравниванием вала ротора с магнитным полем статора. Магнитный момент — это «крутящий момент, создаваемый взаимодействием между магнитным полем магнита и током в обмотке статора».
Момент сопротивления: Момент сопротивления относится к крутящему моменту, создаваемому выравниванием ротора, который возникает, когда магнитное поле создает желаемый прямой поток от северного полюса статора к южному полюсу статора.
Магнитный момент: Постоянные магниты создают магнитное поле в роторе. Статор создает поле, которое взаимодействует с магнитным полем ротора. Изменение положения поля статора по отношению к полю ротора вызывает смещение ротора. Сдвиг из-за этого взаимодействия представляет собой магнитный момент.
SPM и IPM
Электродвигатели с постоянными магнитами можно разделить на две основные категории: двигатели с поверхностными постоянными магнитами (SPM) и двигатели с внутренними постоянными магнитами (IPM) (см. рис. 3). Ни один из типов конструкции двигателя не содержит стержней ротора. Оба типа генерируют магнитный поток постоянными магнитами, прикрепленными к ротору или внутри него.
Двигатели SPM имеют магниты, прикрепленные к внешней поверхности ротора. Из-за такого механического крепления их механическая прочность ниже, чем у двигателей IPM. Ослабленная механическая прочность ограничивает максимальную безопасную механическую скорость двигателя. Кроме того, эти двигатели имеют очень ограниченную магнитную заметность (L д ≈ L q ). Значения индуктивности, измеренные на выводах ротора, постоянны независимо от положения ротора. Из-за отношения заметности, близкого к единице, конструкции двигателей SPM в значительной степени, если не полностью, зависят от магнитной составляющей крутящего момента для создания крутящего момента.
Двигатели IPM имеют постоянный магнит, встроенный в сам ротор. В отличие от их аналогов SPM, расположение постоянных магнитов делает двигатели IPM очень надежными с механической точки зрения и подходящими для работы на очень высоких скоростях. Эти двигатели также отличаются относительно высоким коэффициентом значимости магнитного поля (L q > L d ). Из-за своей магнитной заметности двигатель IPM может генерировать крутящий момент, используя преимущества как магнитной, так и реактивной составляющих крутящего момента двигателя (см. Рисунок 4).
Моторные конструкции PM
Моторные конструкции PM можно разделить на две категории: внутренние и поверхностные. Каждая категория имеет свое подмножество категорий. Поверхностный двигатель с постоянными магнитами может иметь свои магниты на поверхности ротора или быть вставленным в него, чтобы повысить надежность конструкции. Расположение и конструкция внутреннего двигателя с постоянными магнитами могут сильно различаться. Магниты двигателя IPM можно вставлять в виде большого блока или располагать в шахматном порядке по мере приближения к сердечнику. Другой метод заключается в том, чтобы встроить их в узор со спицами.
Изменение индуктивности двигателя с постоянными магнитами в зависимости от нагрузки
Только определенное количество потока может быть связано с куском железа для создания крутящего момента. В конце концов, железо насыщается и больше не позволяет флюсу связываться. Результатом является уменьшение индуктивности пути, пройденного полем потока. В машине с постоянными магнитами значения индуктивности по осям d и q будут уменьшаться с увеличением тока нагрузки.
Индуктивности по осям d и q двигателя SPM почти идентичны. Поскольку магнит находится вне ротора, индуктивность по оси q будет падать с той же скоростью, что и индуктивность по оси d. Однако индуктивность двигателя IPM будет уменьшаться по-разному. Опять же, индуктивность по оси d, естественно, ниже, потому что магнит находится на пути потока и не создает индуктивного свойства. Следовательно, по оси d насыщается меньше железа, что приводит к значительно меньшему уменьшению потока по отношению к оси q.
Ослабление/усиление потока двигателей с постоянными магнитами
Поток в двигателе с постоянными магнитами создается магнитами. Поле потока следует по определенному пути, который можно усиливать или противодействовать. Повышение или усиление поля потока позволит двигателю временно увеличить выработку крутящего момента. Противодействие полю потока сведет на нет существующее магнитное поле двигателя. Уменьшенное магнитное поле ограничит создание крутящего момента, но уменьшит напряжение противо-ЭДС. Уменьшенное напряжение противо-ЭДС высвобождает напряжение, чтобы подтолкнуть двигатель к работе на более высоких выходных скоростях. Оба типа работы требуют дополнительного тока двигателя. Направление тока двигателя по оси d, заданное контроллером двигателя, определяет желаемый эффект.
Угол возбуждения
Угол возбуждения — это угол, под которым векторная сумма сигналов по осям d и q подается на двигатель относительно оси d. Ось d всегда рассматривается как место, где находится магнит. Максимальный магнитный поток достигается на оси q, которая находится на расстоянии 90 электрических градусов от оси d. Поэтому в большинстве эталонов угла возбуждения уже учитывается разница в 90 градусов от оси d к оси q.
Фазовый угол и крутящий момент
Магнитный момент максимален, когда поле статора возбуждает ротор двигателя под углом 90 электрических градусов от оси d (положение магнита двигателя). Момент нежелания следует по другому пути и достигает максимума на 45 электрических градусов за осью q. Максимальный магнитный момент использует как магнитное сопротивление двигателя, так и магнитный момент. Дальнейшее смещение от оси q уменьшает магнитный крутящий момент, но его значительно перевешивает усиление реактивного момента. Максимальный комбинированный магнитный и реактивный момент возникает около 45 электрических градусов от оси q, но точный угол будет варьироваться в зависимости от характеристик двигателя с постоянными магнитами.
Плотность мощности двигателя с постоянными магнитами
Мощность двигателя с постоянными магнитами зависит от конфигурации магнитов двигателя и результирующей заметности двигателя. Двигатели с высоким коэффициентом значимости (Lq > Ld) могут повысить КПД двигателя и выработку крутящего момента за счет включения реактивного крутящего момента двигателя. Инвертор можно использовать для изменения угла возбуждения относительно оси d, чтобы максимизировать как реактивный момент, так и магнитный момент двигателя.
Типы магнитов двигателя PM
В настоящее время для электродвигателей используется несколько типов материалов с постоянными магнитами. Каждый вид металла имеет свои преимущества и недостатки.
Размагничивание постоянным магнитом
Постоянные магниты вряд ли являются постоянными и имеют ограниченные возможности. На эти материалы можно воздействовать определенными силами, чтобы размагнитить их. Другими словами, можно удалить магнитные свойства материала постоянного магнита. Вещество с постоянными магнитами может размагнититься, если материал подвергается значительной деформации, нагреванию до значительных значений или подвергается воздействию сильных электрических помех.
Во-первых, натяжение постоянного магнита обычно осуществляется физическими средствами. Магнитный материал может размагнититься, если не ослабнуть, если подвергнется сильным ударам/падениям. Ферромагнитный материал обладает присущим ему магнитным свойством. Однако эти магнитные свойства могут излучать в любом множестве направлений. Одним из способов намагничивания ферромагнитных материалов является приложение к материалу сильного магнитного поля для выравнивания его магнитных диполей. Выравнивание этих диполей направляет магнитное поле материала в определенную ванну. Сильное воздействие может нарушить выравнивание атомов магнитных доменов материала, что ослабит силу предполагаемого магнитного поля.
Во-вторых, температура также может влиять на постоянный магнит. Температуры заставляют магнитные частицы в постоянном магните волноваться. Магнитные диполи способны выдерживать некоторое тепловое возбуждение. Однако длительное перемешивание может ослабить силу магнита, даже если он хранится при комнатной температуре. Кроме того, все магнитные материалы имеют порог, известный как «температура Кюри», который представляет собой порог, определяющий температуру, при которой тепловое возбуждение приводит к полному размагничиванию материала. Такие термины, как коэрцитивная сила и удерживающая способность, используются для определения способности магнитного материала сохранять прочность.
Наконец, сильные электрические помехи могут привести к размагничиванию постоянного магнита. Эти электрические помехи могут быть вызваны взаимодействием материала с сильным магнитным полем или прохождением через материал большого тока. Точно так же, как сильное магнитное поле или ток можно использовать для выравнивания магнитных диполей материала, другое сильное магнитное поле или ток, приложенный к полю, создаваемому постоянным магнитом, может привести к размагничиванию.
Самоопределение в сравнении с работой в замкнутом контуре
Последние достижения в технологии приводов позволяют стандартным приводам переменного тока «самообнаруживать» и отслеживать положение магнита двигателя. Система с обратной связью обычно использует канал z-pulse для оптимизации производительности. С помощью определенных процедур привод узнает точное положение магнита двигателя, отслеживая каналы A/B и корректируя ошибки с помощью z-канала. Знание точного положения магнита позволяет создать оптимальный крутящий момент, что приведет к оптимальной эффективности.
Серводвигатели
Серводвигатели — это двигатели с постоянными магнитами, используемые для управления движением. Как правило, в конструкции двигателя с внутренними / внутренними постоянными магнитами эти двигатели работают в паре со специальным усилителем как часть согласованного набора для достижения максимальной производительности. Усилитель был точно настроен производителем на двигатель с постоянными магнитами для достижения оптимальной производительности. Конфигурация усилителя движения/сервопривода обычно использует обратную связь двигателя, которая также обеспечивает обратную связь по положению магнитного полюса и скорости.
Кристофер Яшолт () — специалист по управлению приводами в компании Yaskawa America Inc. Он имеет более чем девятилетний опыт работы в области управления движением. Помимо своей нынешней должности, Ящольт работал инженером технической поддержки и инженером по применению.