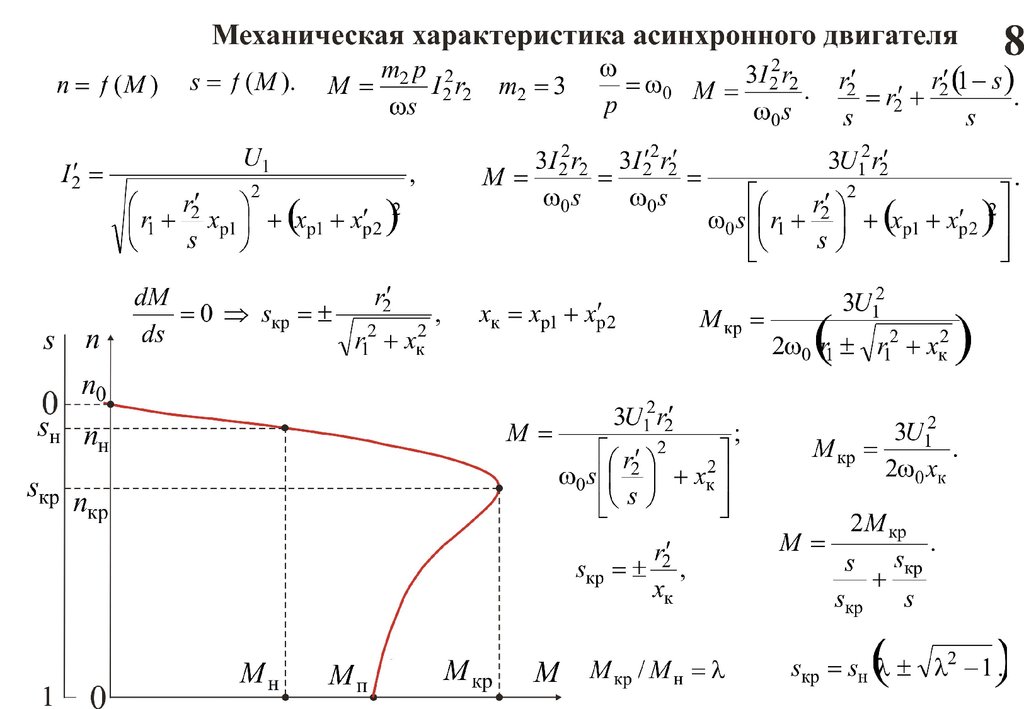
Искусственные механические характеристики асинхронного двигателя
4.5 Искусственные механические характеристики асинхронного двигателя
4.5.1 Влияние активного сопротивления в цепи ротора
Включение симметричных активных сопротивлений в цепь ротора широко используется для ограничения пусковых токов и для изменения вида механической характеристики асинхронного двигателя с фазным ротором. Эти двигатели используются в электроприводах подъёмных, транспортных и металлургических установок, а также в приводах вентиляторов, насосов, компрессоров и т.д.
Добавочное сопротивление в цепи ротора не изменяет критический момент двигателя , но вызывает увеличение скольжения:
. (4.17)
Вследствие этого у двигателей с контактными кольцами при введении сопротивления в цепь ротора максимум кривой момента смещается в сторону больших скольжений и механические характеристики будут располагаться ниже естественной (рис. 4.6). Соответствующим выборам можно настолько увеличить крутизну механической характеристики, чтобы критический момент имел место при пуске двигателя или даже был в области противовключения.
4.6). Соответствующим выборам можно настолько увеличить крутизну механической характеристики, чтобы критический момент имел место при пуске двигателя или даже был в области противовключения.
, т.е.
Приближенно реостатные характеристики в рабочей их части могут быть приняты линейными. Это дает возможность при расчете сопротивлений, включаемых в ротор асинхронного двигателя, пользоваться методами, аналогичными методам, применяемым для двигателя постоянного тока независимого возбуждения.
Обычно требуется определить сопротивление дополнительного резистора , при включении которого АД будет иметь заданную искусственную механическую характеристику или она будет проходить через заданную точку с координатами и . При этом естественная механическая характеристика считается известной. Расчёт сопротивления может быть произведён несколькими способами в зависимости от того, как заданна искусственная характеристика.
Если искусственная характеристика заданна полностью и известны значения , и , отношение критических скольжений может быть найдено
.
Искомое значение в этом случае может быть найдено
или (4.18)
В то же время, считая характеристики в рабочей части линейными, можно записать, что
.
Отсюда
,
; (4.19)
Если искусственная характеристика заданна рабочей частью, то можно использовать метод отрезков, рассмотренный ранее для двигателей постоянного тока. Для этого проводится вертикальная линия при и отмечаются точки пересечения с характеристиками. Считая, что отрезки пропорциональны сопротивлениям в роторе, т.е.
, ,, и .
Сопротивление искомых резисторов может быть найдено
и т.д.
Если отсутствуют каталожные данные сопротивления обмотки ротора, оно может быть рассчитано
,
либо найдено по методу отрезков
где — номинальное сопротивление асинхронного двигателя, определяемое по формуле
Увеличение активного сопротивления вторичного контура улучшает . Это способствует увеличению активной составляющей тока ротора и, следовательно, момента двигателя. Но значительное увеличение сопротивления может настолько ограничить ток ротора, что его активная составляющая и пусковой момент двигателя будут малы даже при высоком значении .
Но значительное увеличение сопротивления может настолько ограничить ток ротора, что его активная составляющая и пусковой момент двигателя будут малы даже при высоком значении .
4.5.2 Влияние индуктивного сопротивления в цепи ротора
Для обеспечения плавного разгона привода при малом числе ступеней ускорения в цепь ротора асинхронного двигателя включают наряду с активным также и индуктивное сопротивления. Применение индуктивных сопротивлений в цепи ротора (рис. 4.7) позволяет ограничить пусковой ток, а также обеспечить большее значение момента двигателя в процессе пуска. При включении реактора последовательно с активным сопротивлением в первый момент пуска двигателя при частоте тока ротора, равной частоте сети, индуктивное сопротивление реактора велико и оно ограничивает пусковой ток. По мере разгона двигателя ротора уменьшается, но одновременно с этим уменьшается и частота во вторичной цепи. При этом уменьшается и индуктивное сопротивление ротора, в результате чего ток ротора спадает не столь интенсивно, как при наличии только активного сопротивления.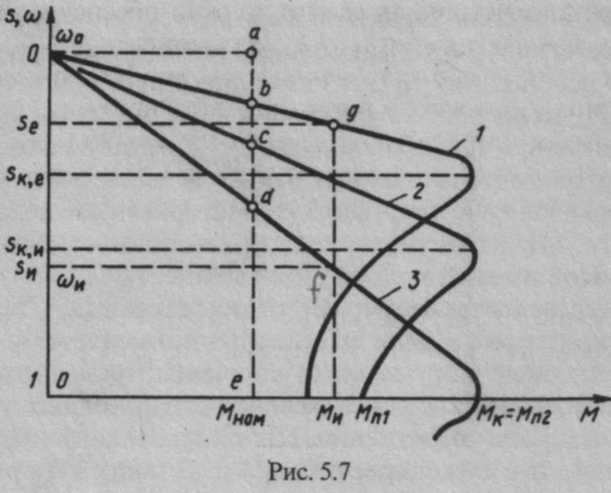
В конце пуска замыкаются контакты K и двигатель выводится на естественную механическую характеристику.
При введении индуктивного сопротивления в цепь статора или ротора уменьшается критическое скольжение и максимальный момент. Механические характеристики асинхронного двигателя при этом будут иметь вид (рис.4.7).
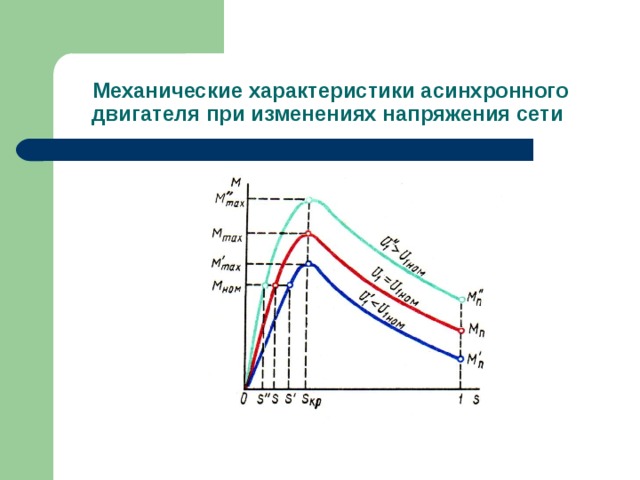
4.5.3 Влияние напряжения питающей сети
Рассмотрим влияние изменения напряжения сети на механические характеристики асинхронного двигателя. Из выражений (4.7) и (4.11) следует, что ток ротора , а значит и пропорциональны приложенному напряжению, а момент двигателя его квадрату
,
В то же время критическое скольжение от напряжения не зависит. Синхронная скорость АД также остаётся неизменной.
Уменьшение напряжения сети, не изменяя критического скольжения, приводит к значительному снижению максимального момента (рис. 4.8). Крутизна механических характеристик при снижении напряжения возрастает. Устойчивая работа АД при возможна только в интервале от до .
Например, при снижении напряжения на 30% критический момент снизится на 5% по сравнению с номинальным режимом. При пуске снижение напряжения может оказаться ещё большим из-за больших значений пускового тока. Поэтому при длинных линиях питания АД, а также для мощных АД, когда их мощность соизмерима с мощностью трансформаторной подстанции, необходимо выполнить расчёты, подтверждающие возможность нормального пуска при пониженных напряжениях. По этой же причине считается допустимым снижение напряжения после аварийных режимов в пределах % номинального значения. Особенно опасно снижение напряжения для приводов, которые запускаются под нагрузкой.
4.5.4 Влияние частоты питающей сети
Изменение частоты питающей сети приводит не только к изменению критического скольжения и максимального момента, но и синхронной скорости
, (4.22)
Если питать двигатель от источника пониженной частоты, то для обеспечения нормальных энергетических показателей необходимо соответственно снижать и напряжение.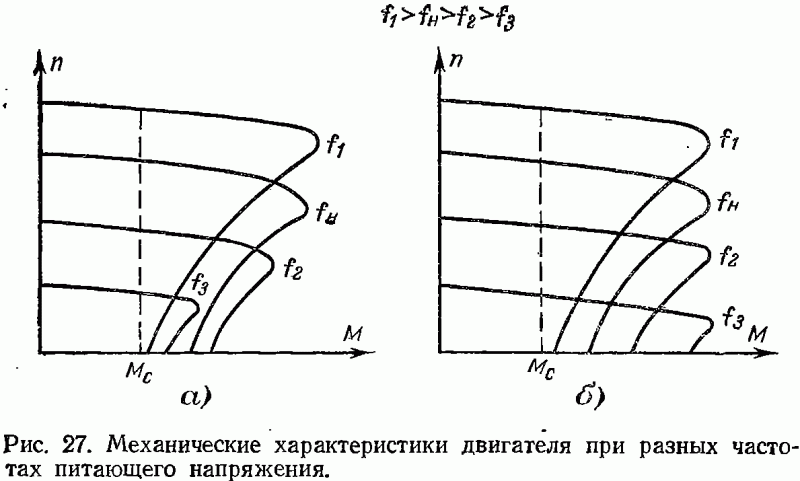
Вместе с этой лекцией читают «Промысловая подготовка газа».
Действительно, если пренебречь потерей напряжения в статоре, то можно записать следующее приближенное выражение для напряжения на зажимах двигателя:
. (4.23)
Из этого выражения следует, что при с уменьшением частоты будет увеличиваться магнитный поток двигателя Ф. А так как двигатели выполняют с насыщенной магнитной системой, то это приведет к значительному увеличению намагничивающего тока. В результате увеличения потери в двигателе и уменьшится .
С изменением частоты f1 изменяется , а поэтому на характеристике может оказывать существенное влияние и сопротивление , роль которого с изменением может меняться. Например при значительном снижении частоты, когда влияние величины из – за уменьшения становится значительным, критический момент заметно уменьшается.
Критическое скольжение и синхронная скорость изменяются в одинаковой степени, критическое скольжение уменьшается с ростом частоты, и с уменьшением ее растет.
Характеристики в пределах рабочей части будут, параллельны друг другу с изменением частоты меняется и пусковой момент.
Искусственные механические характеристики асинхронного двигателя
Особенности расчета искусственных механических характеристик асинхронного двигателя состоят в следующем.
При изменении напряжения питания критическое скольжение и соответствующая ему частота вращения асинхронного двигателя остаются такими же, как при работе двигателя в естественном режиме. Электромагнитный момент M асинхронного двигателя, как следует из его математического выражения, прямо пропорционален напряжению питания во второй степени. Поэтому значения Ми для построения искусственной механической характеристики можно определить по результатам расчета естественной механической характеристики, используя следующее соотношение:
|
| U1 |
| 2 | |
Mи | M k2 M . | ||||
|
| ||||
| U | ||||
| U1н |
| |||
Механические характеристики при изменении напряжения питания асинхронного двигателя приведены на рис. 7, 8.
Рис. 7 |
Рис. 8 |
13
Увеличение активного сопротивления фазной обмотки ротора
асинхронного двигателя до R 2и = kR2R 2 приводит к пропорциональному возрастанию критического скольжения:
sк.и | R2и | |
| . | |
R12 X1 X 2 2 | ||
Электромагнитный момент двигателя при измененном активном сопротивлении обмотки ротора вычисляют по формуле
Mи | 3U12н pR2и |
| . | |
2 f1нs R1 R2и s 2 | X1 | X2 2 | ||
|
|
|
| |

При расчете этой искусственной механической характеристики рекомендуется задаться значениями скольжения s = 0; sн; 4sн; sки; 0,6; 0,8; 1,0. Влияние активного сопротивления фазных обмоток ротора на механическую характеристику асинхронного двигателя показано на рис. 9.
Рис. 9
При регулировании частоты вращения асинхронного двигателя изменением частоты напряжения питания по закону U1 /f1 = const критическое скольжение двигателя находят из выражения
sк.и | R2 | , |
R12 k 2f X1 X 2 2 |
т. е. с уменьшением частоты питающего напряжения критическое скольжение возрастает, а с увеличением частоты — уменьшается.
14
Расчет электромагнитного момента двигателя проводят с учетом того, что при рассматриваемом способе его регулирования
U1 | U1нkU | U1н const, |
f1 | f1нk f | f1н |
т. е. kU = kf. На основании этого соотношение (1) для электромагнитного момента асинхронного двигателя принимает следующий вид:
е. kU = kf. На основании этого соотношение (1) для электромагнитного момента асинхронного двигателя принимает следующий вид:
Mи | 3U12н pR2k f |
|
| . | |
2 f1нs R1 R2 s 2 | k 2f | X1 | X2 2 | ||
|
|
|
|
| |
При расчете этой искусственной механической характеристики электродвигателя рекомендуется задаться значениями скольжения
s= 0; sн; 1,5sн; sк.и; 0,6; 0,8; 1,0. Частота вращения магнитного поля
вдвигателе зависит от частоты напряжения питания и будет
n1и 60 f1нk f , p
а частота вращения его ротора
n2и n1и 1 s .
Механические характеристики асинхронного двигателя при рассматриваемом способе регулирования его частоты вращения приведены на рис.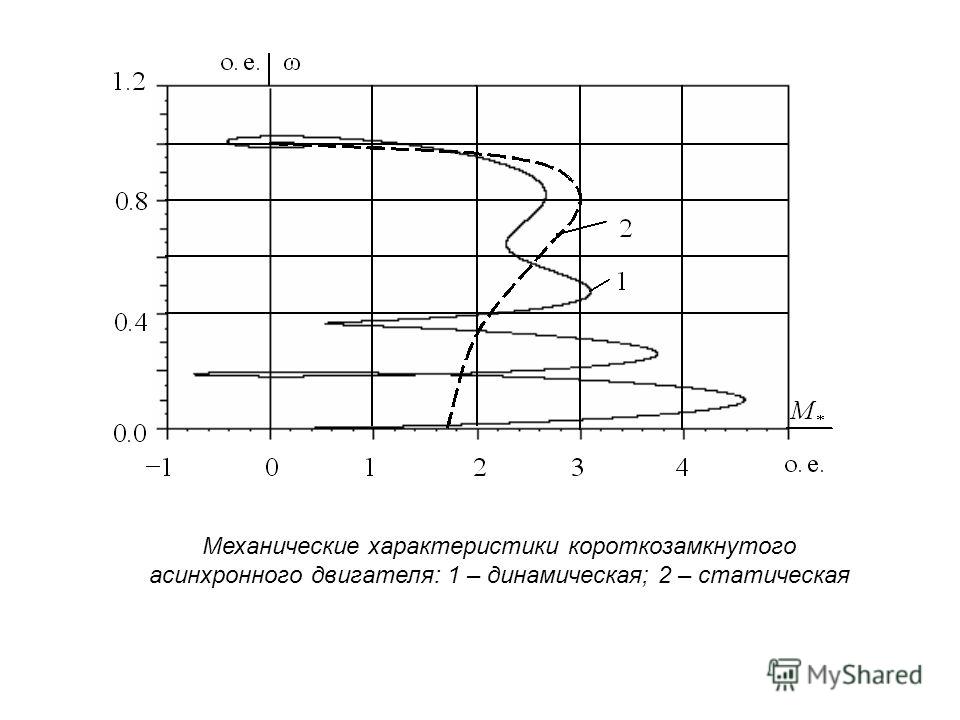 10.
10.
Рис. 10
15
Рабочими характеристиками асинхронного двигателя называют графические изображения зависимостей n2, M, I1, cos , P1,
= f (P2) при U1 = const и f1 = const. При U1 = U1н и f1 = f1н эти ха-
рактеристики являются естественными.
Расчет естественных рабочих характеристик асинхронного двигателя рекомендуется выполнять для значений скольжения s = = sх; 0,5sн; sн; 1,5sн. При этом следует учесть, что соответствующие этим скольжениям электромагнитный момент М и частота вращения n2 асинхронного двигателя, кроме значений этих параметров при его холостом ходе с s = sх, рассчитывают при выполнении п. 2 задания (см. разд. 1). Для определения значений других величин, входящих в состав рабочих характеристик двигателя, необходимо использовать его Г-образную схему замещения, изображенную на рис. 4. На основании первого закона Кирхгофа для этой схемы имеем
I1 I1х I2.
Токи в параллельных ветвях схемы замещения асинхронного двигателя рассчитывают по формулам
| I1х |
| U1 |
| I1х. | (2) | |
| Rх jX х | ||||||
I2 |
|
| U1 |
|
| I2а jI2р, | (3) |
R1 R2 | s | j X1 X2 | |||||
где I1х.а, I1х.р — активная и реактивная составляющие тока намагничивания, т. е. тока идеального холостого хода электродвигателя;
I2а , I2р — приведенные к обмотке статора активная и реактивная
составляющие тока обмотки ротора электродвигателя. В итоге фазный ток асинхронного двигателя будет
I1 I1х.а I2а j I1х.р I2р I1а jI1р,
а его действующее значение
I1 I12а I12р .
16
Коэффициент мощности асинхронного двигателя может быть определен по формуле
cos I1а .
I1
Правомерность применения этой формулы для расчета cos асинхронного двигателя поясняет векторная диаграмма фазных напря-
жения и тока, приведенная на рис. |
|
|
| ||||||||||
Потребляемую двигателем из |
|
|
| ||||||||||
сети | мощность вычисляют | по |
|
|
| ||||||||
формуле |
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
| ||
| P1 3U1I1 cos. |
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
| |||
Развиваемая двигателем меха- |
|
|
|
| |||||||||
|
|
|
| ||||||||||
ническая мощность на основании |
|
| Рис. 11 | ||||||||||
схемы замещения будет |
|
|
|
|
|
|
|
|
|
| |||
|
| Pмех 3I 2 R2 | 1 s | , |
|
| |||||||
|
|
|
|
|
|
| |||||||
|
|
|
| 2 |
| s |
|
|
| ||||
|
|
|
|
|
|
|
|
| |||||
где I | 2 I 2 | I 2. |
|
|
|
|
|
|
|
|
|
| |
2 | 2а | 2р |
|
|
|
|
|
|
|
|
|
| |
Для расчета КПД двигателя используют выражение | |||||||||||||
|
|
| P2 |
| P1 P | , |
|
| |||||
|
| P1 |
|
|
| ||||||||
|
|
|
| P1 |
|
|
| ||||||
где P2 — полезная механическая мощность на валу двигателя;P — потери мощности в двигателе.
Потери мощности P, возникающие в асинхронном двигателе при преобразовании электрической энергии в механическую, рассеиваются в двигателе и приводят к его нагреву:
P Pпер Pпост,
где Pпер — переменные потери мощности в двигателе; Pпост — постоянные потери мощности в двигателе.
Переменные потери мощности зависят от нагрузки двигателя, т. е. от тока двигателя. В них входят мощность потерь в обмотке
статора Рэ1, мощность потерь в обмотке ротора Рэ2 и мощность добавочных потерь Pд:
17
Pпер Pэ1 Pэ2 Pд.
Из схемы замещения асинхронного двигателя (см. рис. 4) следует
Pэ1 | 3R1I 2 | ; |
| |
| 2 |
| (4) | |
Pэ2 | 3R2 I 2 . | |||
| ||||
| 2 |
|
| |
Добавочные потери мощности Pд возникают в обмотках двигателя и обусловлены зубчатостью статора и ротора, а также несинусоидальным распределением магнитной индукции в воздушном зазоре двигателя. Эти потери мощности пропорциональны квадрату фазного тока двигателя и составляют 0,5…1 % от номинальной мощности потерь Pн, поэтому ими при расчете КПД асинхронного двигателя допустимо пренебречь.
К постоянным потерям мощности асинхронного двигателя, не изменяющимся от нагрузки, при U1 = U1н и f1 = f1н можно отнести мощность потерь в стали Рст и мощность механических потерьРмех. Общая мощность этого вида потерь составляет
Pпост Pст Pмех.
Мощность потерь Рст определяется в основном потерями изза гистерезиса и вихревых токов в сердечнике статора, так как подобные потери мощности в сердечнике ротора в связи с малой частотой тока обмотки ротора f2 = 1…3 Гц в рабочем режиме асинхронного двигателя пренебрежимо малы. Тогда на основании схемы замещения асинхронного двигателя (см. рис. 4) имеем
Pст 3RхI 2 . | (5) |
1х |
|
Мощность механических потерь Рмех обусловлена силами трения в подшипниках, ротора о воздух и вентиляционными потерями. Она определяется при номинальном режиме работы асинхронного двигателя. Для этого по формулам (2)–(5) при U1 = U1н и s = sн с использованием параметров схемы замещения асинхрон-
ного двигателя в следующей последовательности рассчитывают: I1х — ток идеального холостого хода двигателя;
I2н — номинальный приведенный ток обмотки ротора;
Pэ1н, Pэ2н — номинальная мощность потерь статора и ротора соответственно;
18
Pст — мощность потерь в стали.
Затем по паспортным данным определяют номинальную по-
требляемую мощность асинхронного электродвигателя
P1н P2н
н
и номинальную мощность потерь
Pн P1н P2н.
В результате мощность механических потерь будет
Pмех Pн Pэ1н Pэ2н Pст .
Полезная механическая мощность асинхронного двигателя Р2 меньше развиваемой им механической мощности Рмех на величину мощности механических потерь
P2 Pмех Pмех.
Механическим потерям мощности Рмех в двигателе соответствует приложенный к его валу момент трения
M 30 Pмех . тр n2н
Для преодоления момента трения Мтр асинхронный двигатель должен развивать равный ему электромагнитный момент. Поэтому скольжение асинхронного двигателя при работе в режиме реального холостого хода sх > 0. Принимая во внимание, что зависимость скольжения асинхронного двигателя от его электромагнитного
момента при 0 М Мн практически линейная, значение скольжения sх определяют из соотношения
sх M тр sр,
Mр
где sр, Мр — скольжение и соответствующий ему электромагнитный момент асинхронного двигателя в реперной (опорной) точке механической характеристики.
Выбор значения скольжения sр, по которому рассчитывают момент Мр, осуществляется в диапазоне 0,1sн sр 0,5sн. При этом
19
Асинхронные двигатели — последние достижения, новые перспективы и области применения
- Зарегистрируйтесь сейчас
Присоединяйтесь к нам и опубликуйте свою работу в открытом доступе на intechopen. com с более чем 3,3 МИЛЛИОНАМИ уникальных посетителей в месяц
Зарегистрируйтесь для участия
*Регистрация на эту книгу закрывается 26 декабря 2022 г. Америка
Доктор Адель Эль-Шахат является доцентом программы «Энергетика» Школы инженерных технологий Университета Пердью, США. Доктор Эль-Шахат является основателем и директором Лаборатории перспективных энергоблоков и возобновляемых источников энергии (A_PURDUE) по моделированию, проектированию, оптимизации и контролю, а также членом Американской ассоциации содействия развитию науки и Американского инженерного общества. Образование. Он опубликовал множество журнальных статей, 5 глав в книгах и работал редактором 4 книг.
Однофазные асинхронные двигатели Трехфазные асинхронные двигатели Коллекторные асинхронные двигатели Управление переменным напряжением Управление переменной частотой
О книге
Объем книги отражает последние достижения, новые перспективы и области применения асинхронных двигателей. Он представит всестороннюю платформу асинхронных двигателей, чтобы дать читателю комплексное представление о последних исследованиях. Асинхронный двигатель является одним из самых значительных нововведений в современной истории, и он официально положил начало второй промышленной революции, значительно повысив эффективность производства энергии. Асинхронные двигатели используются в самых разных областях современного промышленного мира. Предлагаемые темы многочисленны, такие как основы асинхронных двигателей, конструкция и эксплуатация, однофазные и трехфазные асинхронные двигатели, промышленные и бытовые приборы, щеточные или бесщеточные асинхронные двигатели, оценка параметров, стандарты, работа и характеристики асинхронных двигателей, вектора электромагнитного пространства и эквивалентные схемы, асинхронные двигатели в переходных режимах, минимизация потерь, приводы и управление асинхронными двигателями, стратегии управления асинхронными двигателями, частотно-регулируемое управление, полеориентированное управление, прямое управление моментом, анализ переходных процессов, расчетное ускорение заряда, силовые электронные преобразователи, инверторные схемы с микропроцессорным управлением, стационарные условия, асинхронные двигатели с инверторным питанием, бессенсорное управление скоростью, интеллектуальное и интеллектуальное управление, искусственный интеллект, оптимизация производительности, оценка затрат, максимизация эффективности, асинхронные двигатели приложения, промышленные приложения, бытовая техника конвейеры, краны, насосы, подъемники, компрессоры, вентиляторы, воздуходувки, пускатели напряжения, поршневые насосы, дробилки, штамповочные прессы, бульдозеры, штамповочные машины, ударные нагрузки, станки, центробежные насосы, Следовательно, эти двигатели используется для привода периодических нагрузок, требующих быстрого ускорения и сильных ударов, таких как штамповочные прессы, бульдозеры, штамповочные машины и ножницы, маховики, электростанции, робототехника, заводы, электромобили, асинхронные машины с двойным питанием, ветроэнергетика, возобновляемые источники энергии. Книга будет полезна студентам, аспирантам, исследователям, профессорам и полевым инженерам. Он направлен на объединение как теоретического охвата, так и концепций практического применения. Он предоставит достаточные и ценные знания о различных применениях асинхронных двигателей, от традиционных до последних достижений. Книга не будет ограничиваться только упомянутыми темами; авторы имеют полную свободу представить главы из своей текущей работы, связанные с индукционными машинами.
Темы
Следующие темы иллюстрируют целевые предметные области и объем проекта. Эти ключевые слова не являются определяющими, но их можно использовать в качестве основы для содержания главы. Мы принимаем теоретические и прикладные научные статьи, которые могут быть представлены как оригинальные исследовательские и обзорные статьи. Необходимый объем полных глав составляет 10-20 страниц.
Тематические области и ключевые слова
Однофазные асинхронные двигатели
Моторы с матовой индукцией
Управление с переменной частотой
Прямой контроль крутящего момента
Эквивалентные цепи
Центробежные насосы
Трехфазы Индукционный двигатель
Управление с переменным Voltage
2-фазы. Станки
Привод прерывистых нагрузок
IntechOpen занимается публикацией исключительно рецензируемых статей и книг. Все научные работы перед публикацией проходят рецензирование. IntechOpen является членом Комитета по этике публикаций (COPE), и всем участвующим рецензентам и академическим редакторам поручено рецензировать представленные научные работы в соответствии с Этическими принципами COPE для рецензентов, где это применимо.
Зарегистрироваться для участия
Процесс публикации
Книга инициирована и назначен редактор
Дата завершения: 23 ноября 2022 г.
Предложения по главам отправлены и рассмотрены полностью и отправлено
Крайний срок для полных глав: 22 февраля 2023 г.
Полные главы прошли рецензирование
Результаты проверки должны быть представлены: 23 апреля 2023 г.
Book compiled, published and promoted
Expected publication date: July 12th 2023
Gérard Mourou
2018 NOBEL
WINNER
Yoshinori Ohsumi
2016 NOBEL
WINNER
Gerard’t Hooft
1999 NOBEL
ПОБЕДИТЕЛЬ
Гарольд В. Крото
Нобелевская премия 1996 года
ПОБЕДИТЕЛЬ
Хироси Исигуро
Суперзвезда Робототехник и андроид-провидец будущего
Льюис К. Кэнтли
Премия за прорыв в области наук о жизни 2013 г.
Наши книги в открытом доступе получили более 300 000 цитирований в основных индексируемых базах данных мира, включая
Web of Science™.
Плата за публикацию в открытом доступе (OAPF)
1400 фунтов стерлингов за главу
Никаких скрытых платежей. Фиксированная ставка OA Плата за публикацию рукописей объемом до 20 страниц. Авторы или их учреждения/финансирующие органы должны будут заплатить ОАПФ после принятия после рецензирования.
Что вы получите
Услуги публикации
Великобритания ISBN, DOI
Peeer Review
Индексирование.
 -чтение онлайн-доступа к вашей работе
-чтение онлайн-доступа к вашей работеЛицензии Creative Commons: вы сохраняете права на свою работу
Ваш специальный менеджер по работе с авторами, который будет поддерживать вас в процессе публикации
Сначала в Интернете. Ваша глава будет опубликована после рецензирования, даже до того, как вся книга будет готова к публикации, что гарантирует незамедлительный доступ научного сообщества к вашему исследованию.
Производственные услуги
Корректура на английском языке
XML Верстка и разбиение на страницы — веб (PDF, HTML) и подготовка файлов для печати
IntechOpen % скидка. Чтобы узнать больше информации или получить предложение от Enago, пожалуйста, посетите здесь
Отчеты о считывании вашей главы
Отчеты читателей: данные о загрузках, цитаты, упоминания
Уведомление по электронной почте по 50079999
9
9 ПИТАНИЯ
9 ПИТАНИЯ
9 ПИТАНИЯ
9 ПИТАНИЯ
9 ПРИНАЦИЯ
9 ПРИНАЦИЯ
9 ПИТАНИЯ
9 ПРИНАЦИЯ ПИТАНИЯ
9 ПИТАНИЯ.
9 ПРИВОДА.
Публикация на intechopen.com с
+3,3 МЛН уникальных посетителей в месяцЗарегистрируйтесь для участия
Что делает нас уникальными
Платформа
+185M
Всего загрузок1 Глава загружена
Каждый
2 секунды
Мировой**На основе данных, собранных за 2019-2020 гг.
Ученые
Авторы и редакторы12,2 %
Пришел из мира
500 лучших университетовСодержание
Опубликованные книги открытого доступаЦитаты
+184,650
+259,915
+115,661
50% больше цитат
Чем книги без открытого доступаСообщество
+73 000
Ежемесячная регистрация пользователей+7 140
Исследовательские институтыСлово от авторов IntechOpen
«Я работаю с IntechOpen по ряду причин: их профессионализм, их миссия в поддержку публикаций с открытым доступом и качество их рецензируемых публикаций, а также потому, что они верят в равенство».
«Сотрудничество и поддержка технического персонала IntechOpen фантастичны. Весь процесс подачи статьи и редактирования представленной статьи проходит очень гладко и быстро, количество прочтений и загрузок глав велико, а статьи также часто цитируются». 9. 2022 26 октября; 22 (21): 8210.
дои: 10.3390/s22218210.
Саджал Мишра
1
, Сатиш Кумар
23
, Самир Сайяд
3
, Арункумар Бонгале
3
, Прия Джадхав
3
, Кетан Котеча
23
, Аджит Абрахам
4
, Лубна Абделькарейм Габралла
5
Принадлежности
- 1 Машиностроение, Галготиасский инженерно-технологический колледж, доктор А. П.Дж. Технический университет Абдула Калама, Большая Нойда, 201306, Индия.
- 2 Symbiosis Center for Applied Artificial Intelligence, Symbiosis International (Deemed University), Пуна 412115, Индия.
- 3 Технологический институт Symbiosis, Symbiosis International (Deemed University), Пуна 412115, Индия.
- 4 Исследовательские лаборатории машинного интеллекта, Оберн, Вашингтон, 98071, США.
- 5 Кафедра компьютерных наук и информационных технологий Университета принцессы Нуры бинт Абдулрахман, PO. Box 84428, Эр-Рияд 11671, Саудовская Аравия.
PMID:
36365909
PMCID:
PMC9655596
DOI:
10,3390/с22218210
Бесплатная статья ЧВК
Саджал Мисра и др.
Датчики (Базель).
.
Бесплатная статья ЧВК
. 2022 26 октября; 22 (21): 8210.
дои: 10.3390/s22218210.
Авторы
Саджал Мишра
1
, Сатиш Кумар
23
, Самир Сайяд
3
, Арункумар Бонгале
3
, Прия Джадхав
3
, Кетан Котеча
23
, Аджит Абрахам
4
, Лубна Абделькарейм Габралла
5
Принадлежности
- 1 Машиностроение, Галготиасский инженерно-технологический колледж, доктор А. П.Дж. Технический университет Абдула Калама, Большая Нойда, 201306, Индия.
- 2 Symbiosis Center for Applied Artificial Intelligence, Symbiosis International (Deemed University), Пуна 412115, Индия.
- 3 Технологический институт Symbiosis, Symbiosis International (Deemed University), Пуна 412115, Индия.
- 4 Исследовательские лаборатории машинного интеллекта, Оберн, Вашингтон, 98071, США.
- 5 Факультет компьютерных наук и информационных технологий, Университет принцессы Нуры бинт Абдулрахман, P.O. Box 84428, Эр-Рияд 11671, Саудовская Аравия.
PMID:
36365909
PMCID:
ПМС9655596
DOI:
10,3390/с22218210
Абстрактный
Асинхронный двигатель играет жизненно важную роль в промышленных приводных системах благодаря своей надежности и простоте обслуживания, но в то же время он подвержен электрическим неисправностям, в основном неисправностям ротора, таким как поломка стержней ротора.
Ранняя идентификация недостатков необходима для снижения расходов на поддержку и предотвращения высоких затрат за счет использования сред обнаружения отказов, которые позволяют извлекать признаки и группировать шаблоны проблемы, чтобы отличить отказ в асинхронном двигателе с использованием моделей классификации. В этой статье для классификации неисправностей используется открытый набор данных ротора с разорванными стержнями в трехфазном асинхронном двигателе, доступный на порту данных IEEE. Исследование направлено на выявление неисправности при различных условиях нагрузки на ротор асинхронного двигателя путем выделения характеристик во временной, частотной и частотно-временной областях. Извлеченные признаки предоставляются моделям для классификации исправных и неисправных роторов. Извлеченные признаки из временной и частотной областей дают точность до 87,52% и 88,58% соответственно при использовании модели Random-Forest (RF). Принимая во внимание, что спектрограммы, основанные на коротком временном преобразовании Фурье (STFT), в отношении частоты времени обеспечивают достаточно высокую точность, около 97,67 %, с использованием точно настроенной системы трансферного обучения на основе сверточной нейронной сети (CNN) для диагностики серьезности стержня ротора асинхронного двигателя при различных условиях нагрузки.
Ключевые слова:
Кратковременное преобразование Фурье; диагностика неисправности; Индукционный двигатель; трансферное обучение; сигнал вибрации.
Заявление о конфликте интересов
Авторы заявляют об отсутствии конфликта интересов.
Цифры
Рисунок 1
Блок-схема экспериментального…
Рисунок 1
Блок-схема экспериментального стенда для сбора и формирования базы данных.
фигура 1
Блок-схема экспериментального станка для сбора и формирования базы данных.
Рисунок 2
Описание набора данных поломки ротора…
Рисунок 2
Описание набора данных об обрыве стержня ротора трехфазного асинхронного двигателя.
фигура 2
Описание набора данных об обрыве стержня ротора трехфазного асинхронного двигателя.
Рисунок 3
Этапы извлечения признаков…
Рисунок 3
Этапы извлечения признаков во временной и частотной областях из…
Рисунок 3
Шаги, необходимые для извлечения признаков во временной и частотной областях из необработанных данных.
Рисунок 4
Время, частота (FT) и время-частота…
Рисунок 4
Подход к анализу сигналов во времени, частоте (FT) и частотно-временной области (STFT).
Рисунок 4
Подход к анализу сигналов во времени, частоте (FT) и частотно-временной области (STFT).
Рисунок 5
Этапы генерации спектрограммы…
Рисунок 5
Этапы создания спектрограммы из необработанных данных.
Рисунок 5
Шаги, связанные с генерацией спектрограммы из необработанных данных.
Рисунок 6
Точный подход к трансферному обучению в…
Рисунок 6
Точный подход к трансфертному обучению в предварительно обученных моделях CNN.
Рисунок 6
Точный подход к трансфертному обучению в предварительно обученных моделях CNN.
Рисунок 7
Данные STFT нанесены на график и…
Рисунок 7
Построенные данные STFT и сгенерированная спектрограмма данных вибрации для…
Рисунок 7
Построенные данные STFT и сгенерированная спектрограмма данных вибрации при крутящем моменте 2,5 Нм ( a ) исправный ротор ( b ) один сломанный стержень ротора ( c ) два сломанных стержня ротора ( d ) три сломанных стержни ротора ( e ) четыре сломанных стержня ротора.
Рисунок 8
Порядок работы предлагаемого…
Рисунок 8
Рабочая процедура предлагаемой работы с использованием частотно-временного анализа (STFT).
Рисунок 8
Рабочая процедура предлагаемой работы с использованием частотно-временного анализа (STFT).
Рисунок 9
Матрица путаницы, построенная для моделей…
Рисунок 9
Матрица путаницы, построенная для моделей, обученных на ( a ) функциях временной области…
Рисунок 9
Матрица путаницы, построенная для моделей, обученных на ( a ) функциях временной области и, ( b ) особенности частотной области.
Рисунок 10
Графики обучения и проверки…
Рисунок 10
Обучающие и проверочные графы предлагаемой работы с различными тонко настроенными переносами CNN…
Рисунок 10
Графики обучения и проверки предлагаемой работы с различными точно настроенными сетями обучения с передачей CNN ( a ) обучающие кривые точности и потерь ( b ) проверочные кривые точности и потерь.
Рисунок 11
Матрицы путаницы для тонкой настройки…
Рисунок 11
Матрицы путаницы для точно настроенных сетей трансферного обучения.
Рисунок 11
Матрицы путаницы для точно настроенных сетей трансферного обучения.
См. это изображение и информацию об авторских правах в PMC
использованная литература
Гловач А., Гловач В., Гловач З., Козик Дж. Ранняя диагностика неисправностей подшипников и статора однофазного асинхронного двигателя с использованием акустических сигналов. Измерение. 2018; 113:1–9. doi: 10.1016/j.measurement.2017.08.036.
—
DOI
Берредем Т., Бенидир М. Диагностика неисправностей подшипников с использованием нечеткой экспертной системы, основанной на улучшенном методе перекрытия диапазонов и подобия.
Эксперт Сист. заявл. 2018;108:132–142. doi: 10.1016/j.eswa.2018.04.025.—
DOI
Сайяд С., Кумар С., Бонгале А., Камат П., Патил С., Котеча К. Оценка остаточного срока полезного использования процесса фрезерования на основе данных: датчики, алгоритмы, наборы данных и будущие направления. IEEE-доступ. 2021;9:110255–110286. doi: 10.1109/ACCESS.2021.3101284.
—
DOI
Эль Хашеми Бенбоузид М. Обзор анализа сигнатур асинхронных двигателей как средства обнаружения неисправностей.
- 1 Машиностроение, Галготиасский инженерно-технологический колледж, доктор А.