Сельсины. Виды и режимы работы. Принцип действия и особенности
Во многих технологических процессах в промышленности, а также в системах автоматизации требуется синфазное и синхронное вращение осей, которые не связаны между собой механическим путем. Подобные задачи способны решить системы синхронной связи, которые называются сельсины.
Они обладают способностью самостоятельной синхронизации, и используются в синхронных системах передачи угла вращения на расстоянии в качестве приемников и передатчиков.
Виды синхронной связи
Системы синхронной связи делятся на два вида.
Система синхронного вращения
Эта система выполнена на двух равных асинхронных электродвигателях с фазным ротором. Обмотки роторов между собой соединены, а обмотки статора подключены к одной сети переменного трехфазного тока.
Система синхронного поворота
Работа системы основана на специальных микромашинах индукционного вида (сельсинах), которые обладают свойством самосинхронизации.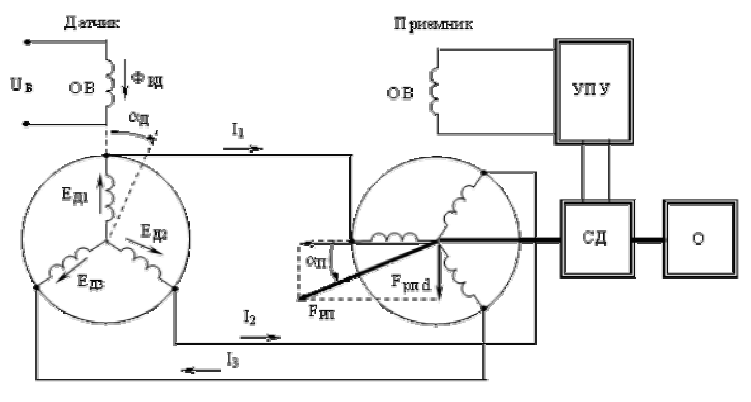
Сельсины делятся по количеству фаз на два вида:
- Трехфазные сельсины по своей конструкции не имеют отличия от асинхронных электродвигателей. Такие модели не нашли широкого применения в основном из-за разности моментов синхронизации во время поворота ротора.
- Однофазные сельсины имеют устройство, аналогичное конструкции маломощных синхронных машин. Их обмотка возбуждения работает от переменного тока.
Режимы работы
В автоматических системах синхронный поворот производится в двух различных режимах.
Индикаторный режим
На рисунке «а» показана схема индикаторного режима. Ведомая ось О2 соединена с ротором сельсина-приемника «П». Такую схему используют при малой величине момента торможения на ведомой оси, чаще всего, когда на оси закреплена индикаторная стрелка.
Обмотки возбуждения подключены в общей цепи, а обмотки синхронизации объединены линией связи.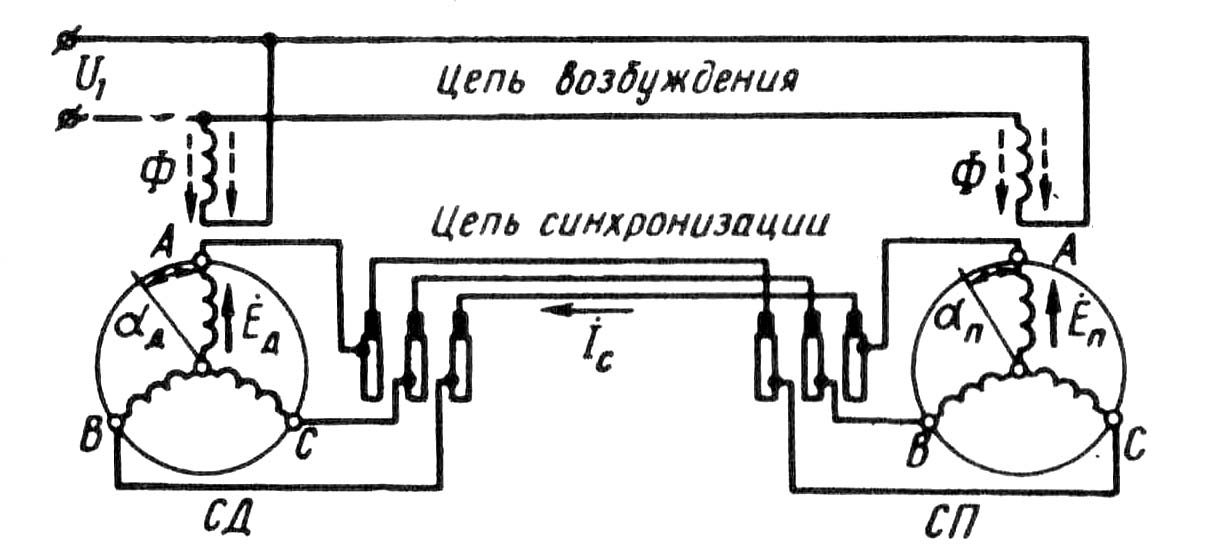 Магнитные потоки, образованные обмотками приемника и датчика, создают в 3-х фазах обмоток электродвижущую силу.
Магнитные потоки, образованные обмотками приемника и датчика, создают в 3-х фазах обмоток электродвижущую силу.
При наличии между роторами угла рассогласования в обмотках возникает ток, который создаст в приемнике и датчике с помощью потока возбуждения моменты разного направления, сводящие к нулю угол рассогласования.
Чаще всего ротор датчика заторможен. Вследствие этого его момент синхронизации действует на механизм поворота ведущей оси. Момент приемника воздействует на ротор и поворачивает его синхронно с ротором датчика на такой же угол.
Трансформаторный режим
Электрический сигнал о рассогласовании роторов поступает на усилитель, а затем на исполнительный мотор, поворачивающий ротор приемника и ведомую ось для устранения рассогласования.
Режим трансформатора используют в таких ситуациях, когда на ведомую ось приложен большой момент торможения, другими словами, для поворота некоторого механизма. В этом режиме обмотка датчика, связанного механическим путем с ведущей осью, подключается к сети питания однофазного тока, а обмотка приемника к усилителю, который подает напряжение на управляющую обмотку исполнительного электрического двигателя. Обмотки синхронизации 2-х сельсинов объединены линией связи.
Обмотки синхронизации 2-х сельсинов объединены линией связи.
Переменный ток образует в обмотке возбуждения датчика импульсы магнитного потока, который создает электродвижущую силу в синхронизирующей обмотке. Обмотки приемника и датчика соединены, поэтому по ним будет проходить ток и в приемнике образуются импульсы магнитного потока.
При наличии рассогласования роторов этот поток создает в возбуждающей обмотке электродвижущую силу, образует на выходе напряжение, которое подается на усилитель, а затем на обмотку статора исполнительного мотора. Вследствие этого ведомая ось поворачивается вместе с ротором приемника. После устранения рассогласования напряжение на выходе обнуляется, и ведомая ось прекращает свое вращение.
В трансформаторном режиме погрешность работы сельсина определяется технологическими и конструктивными особенностями: разбросом параметров приемника и датчика, неравномерностью магнитной проводимости, несимметричностью изготовления обмоток.
Передача угла в этом режиме имеет эксплуатационные погрешности, которые образуются вследствие влияния условий работы на сельсин-приемник.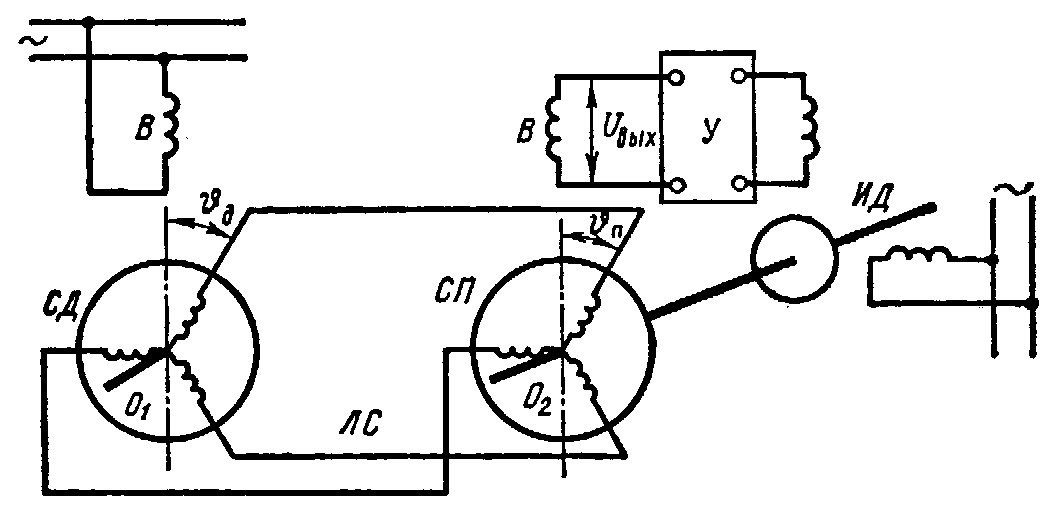 Если изменить сопротивление нагрузки в управляющей цепи обмотки сельсина-приемника, то это отразится на его работе.
Если изменить сопротивление нагрузки в управляющей цепи обмотки сельсина-приемника, то это отразится на его работе.
Схемы, возможные для работы обоих режимов, делятся на три группы:
- Датчик и один приемник.
- Датчик с многими приемниками.
- Один приемник и два датчика.
Конструктивные особенности
Моторы по устройству можно разделить на два вида:
- Контактные с обмоткой ротора, соединенной с внешней цепью с помощью контактных колец и щеток.
- Бесконтактные, не имеющие контактных элементов.
Контактные
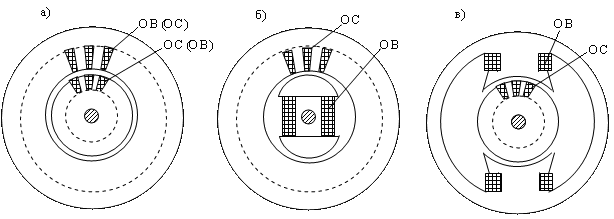
Их устройство аналогично конструкции асинхронных маломощных электродвигателей с фазным ротором. Статор (1) и ротор (2) являются неявнополюсными, вследствие чего обе обмотки (3, 4) являются распределенными. Возбуждающая обмотка находится на роторе. Питание к этой обмотке подходит по двум кольцам (5).
Некоторые модели сельсинов выполнены с ротором и статором, имеющим явно выраженные полюсы. Это дает возможность увеличить момент синхронизации. В качестве недостатка контактных видов сельсинов следует назвать наличие контактных элементов (колец).
Это дает возможность увеличить момент синхронизации. В качестве недостатка контактных видов сельсинов следует назвать наличие контактных элементов (колец).
Бесконтактные сельсины
В сельсинах, не имеющих контактных компонентов, обе обмотки находятся на статоре. Ротор выполнен в виде цилиндра (6) из материала с ферромагнитными свойствами. Ротор разделен на два изолированных полюса с помощью алюминиевой прослойкой (7).
С торцов сельсина находятся сердечники в виде тора (1), изготовленные из электротехнической листовой стали. Внутренняя часть поверхности сердечников находится над ротором. К наружной поверхности подходят стержни внешнего магнитопровода (4). 1-фазную обмотку возбуждения изготавливают в виде 2-х дисковых катушек (2), находящихся по разным сторонам статора между сердечниками и обмоткой синхронизации.
В процессе функционирования сельсина импульсный магнитный поток замыкается в магнитной системе. При этом он соединяется с 3-фазной синхронизирующей обмоткой на статоре. Штриховой линией на рисунке показан путь замыкания магнитного потока.
Штриховой линией на рисунке показан путь замыкания магнитного потока.
Во время поворота ротора меняется позиция оси магнитного потока относительно синхронизирующих обмоток. Вследствие этого электродвижущая сила, возникающая в фазах синхронизирующей обмотки, будет напрямую зависеть от поворота ротора, по аналогии с работой контактных сельсинов.
В качестве недостатка бесконтактных моделей сельсинов можно отметить менее эффективное применение активных материалов. Их вес в 1,5 раза выше контактных конструкций. Это можно объяснить значительными воздушными зазорами. Из-за этого сельсины имеют повышенные токи намагничивания и рассеивающие потоки.
Требования к сельсинам
- Динамическая и статическая точность.
- Способность к самостоятельной синхронизации в диапазоне одного оборота.
- Сохранение заданной точности и свойства самостоятельной синхронизации при повышенных оборотах вращения с несколькими приемниками.
Похожие темы:
что это такое, сфера применения и подключение
Всем кто хотел бы выяснить, что это такое сельсин датчик, необходимо подробно ознакомиться с его устройством и принципом действия. Для этого, прежде всего, следует понять, что он представляет собой разновидность электрических устройств, работающих только на переменном токе.
Для этого, прежде всего, следует понять, что он представляет собой разновидность электрических устройств, работающих только на переменном токе.
Дополнительная информация: Мощность этих приборов варьируется от нескольких единиц до сотен ватт (но не более киловатта).
Лучший способ понять, что такое сельсин датчик – это разобраться с его назначением. После ознакомления с этим вопросом выясняется, что он позволяет отслеживать поведение подвижных частей двух устройств, удаленных на определенное расстояние. Такая возможность позволяет согласовывать их вращение в отсутствие механической связи (электрическим путем – по проводам). Другими словами, сельсиновые датчики это электрически синхронизированные передающие и приемные устройства.
Типы сельсиновых датчиков
Любой действующий сельсин включает в свой состав такие обязательные элементы, как статор и ротор, выполненные в виде обмоток с электромагнитной связью. Известны следующие разновидности электротехнических устройств, отличающиеся количеством катушек, расположенных в статоре и роторе.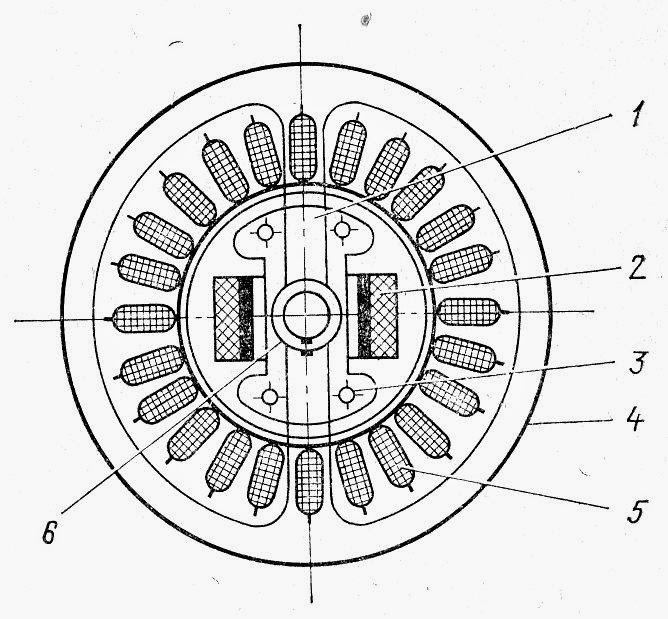 Они могут быть представлены следующими сочетаниями:
Они могут быть представлены следующими сочетаниями:
- Одна и три.
- Три и одна.
- Три и три.
В последнем случае количество обмоток в обеих частях полностью совпадает.
По своему практическому применению (использованию в электронных схемах авторегулировки) эти приборы делятся на следующие виды:
- устройства-датчики;
- сельсины-приемники;
- приборы дифференциального типа.
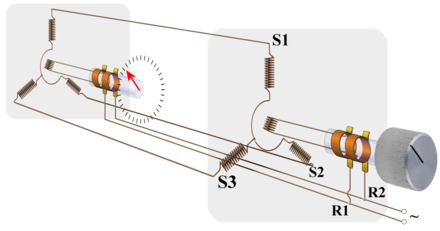
Для понимания работы классического сельсинового прибора потребуется рассмотреть его схематическое представление (фото справа).
Схема и принцип действия
На предложенных схемах изображены различные варианты включения (как датчика, как приемника и в качестве дифференциального устройства).
После их анализа можно сделать следующие выводы:
- Как датчики, так и приемники своими статорными обмотками напрямую подсоединяются к питающей сети.
- Их 3-х катушечные роторные обмотки объединены линейными электрическими связями.

- За счет такого включения при повороте первичного ротора на заданный угол аналогичный узел приемника повернется на тот же градус.
- Если вращать подвижную часть датчика с фиксированной скоростью – с той же частотой будет крутиться соответствующий узел приемника.

В основу данного эффекта заложен принцип э/м индукции, суть которого состоит в способности обмотки с переменным током наводить поле в близко расположенной катушке (на схеме – вариант «а»).
Важно! Индуцировать стороннее поле способен только меняющийся по величине или фазе (то есть переменный) ток.
Величина наводимого в катушке статора ЭДС зависят от ее удаления от роторных обмоток. В случае, когда вращающиеся части двух приборов (приемного и передающего) разнесены от своих статоров на равное расстояние – наблюдается интересный эффект. Он состоит в том, что в этой ситуации токи в роторных контурах равны и противоположны по направлению, что приводит к обнулению их результирующей. Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!
Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!
Функция датчика положения
Если взять и каким-либо способом (вручную, например) провернуть ротор одного из приборов на некоторый угол – равновесие токов в его катушке нарушается. Из-за электрической связи в катушках второго устройства наблюдается аналогичное рассогласование баланса токов. Вследствие этого появляется результирующая, отличная от нуля, что приводить к образованию э/м поля и момента индукции (вращающей силы). Под ее воздействием подвижный узел исполнительной части будет проворачиваться до состояния, в котором равновесие токов полностью восстановится. Нетрудно понять, что это состояние будет соответствовать положению другого прибора.
Авторегулирование
При авторегулировании приемник работает в трансформаторном режиме (на схеме – «б»). Его ротор в данной схеме неподвижен, а обмотка статора полностью отключена от сети. В ней наводится ЭДС за счет токов, протекающих в собственной роторной обмотке (их величина задается состоянием первого устройства). Отсюда следует, что величина наводимой в статоре приемника ЭДС полностью зависит от угла поворота подвижной части датчика.
Отсюда следует, что величина наводимой в статоре приемника ЭДС полностью зависит от угла поворота подвижной части датчика.
Дополнительная информация: Из-за того, что обмотка статора приемника не подключена к сети – фаза напряжения в нем смещена на 90° относительно статорной катушки датчика.
Это обстоятельство учитываются при вычислении выходной ЭДС (через поправочный коэффициент).
Дифференциальный прибор
Это вариант исполнения применяется в тех случаях, когда возникает потребность в определении разности угловых положений двух электрически связанных приборов (таким образом, выявляется степень их рассогласования). Другими словами размещаемые на различных валах сельсиновые датчики в этом случае сравниваются по скорости перемещения их подвижных узлов, после чего определяется их рассогласование.
В данной схеме три катушки от двух крайних приборов электрически соединены с соответствующими обмотками ротора и статора еще одного (третьего) сельсина, который называется дифференциальным (на схеме – «в»). Угол вращения этого третьего определяется как разность показаний для двух приборов-датчиков.
Угол вращения этого третьего определяется как разность показаний для двух приборов-датчиков.
Однофазные сельсины
Сельсинами называют индукционные электромеханические устройства, которые служат для дистанционной передачи угла в самосинхронизирующихся (по-английски — selfsynchronizing) синхронных передачах однофазного переменного тока. По исполнению сельсины делятся на контактные и бесконтактные. На явно выраженных полюсах ротора контактного сельсина расположена сосредоточенная обмотка возбуждения В, получающая питание от сети переменного тока с помощью контактных колец и щеток (на рис. последние не показаны). В пазах магнитопровода статора помещаются три распределенные обмотки синхронизации, сдвинутые в пространстве на электрический угол 2л/3 и устроенные аналогично трехфазной обмотке обычной асинхронной машины. Магнитопроводы статора и ротора собраны из изолированных листов электротехнической стали.
Рис. 1. Схема включения однофазных сельсинов в индикаторном режиме работы
Схема включения сельсина-датчика и сельсина-приемника для дистанционной передачи угла в так называемом индикаторном режиме приведена на рис. 1 (в индикаторном режиме сельсин-приемник не преодолевает внешнего момента нагрузки, и на его валу установлена только указательная стрелка). Обмотки возбуждения В сельсина-датчика и сельсина-приемника включены в общую сеть с напряжением, а концы одноименных фаз обмоток синхронизации соединяются электрически, как показано на рис. 1.
1 (в индикаторном режиме сельсин-приемник не преодолевает внешнего момента нагрузки, и на его валу установлена только указательная стрелка). Обмотки возбуждения В сельсина-датчика и сельсина-приемника включены в общую сеть с напряжением, а концы одноименных фаз обмоток синхронизации соединяются электрически, как показано на рис. 1.
Если углы поворота полюсов роторов датчика Рд и приемника Рп по отношению к осям одноименных фаз одинаковы (Рд = Рп), то ЭДС, индуктированные пульсирующим полем возбуждения в одноименных фазах обмоток синхронизации датчика и приемника, не отличаются друг от друга.
Поскольку в контурах, образованных соединенными фазами обмоток, эти ЭДС направлены встречно, в обмотках синхронизации не возникает никаких токов, и электромагнитные моменты сельсинов равны нулю. Если полюсы роторов располагаются неодинаковым образом по отношению к осям одноименных фаз и так называемый угол рассогласования др = Рд — Рп не равен нулю, то равенство ЭДС в одноименных фазах нарушается (Еаа * Еап и т. д.). В цепи обмоток синхронизации появляются токи, токи обмоток возбуждения также становятся неодинаковыми, и в результате взаимодействия токов статора и ротора на роторы датчика и приемника действуют электромагнитные моменты MR и Мп. Пользуясь известными правилами для определения направлений ЭДС и электромагнитных сил, легко выяснить, что моменты, действующие на роторы датчика и приемника, направлены в противоположные стороны и под их влиянием угол рассогласования уменьшается.
д.). В цепи обмоток синхронизации появляются токи, токи обмоток возбуждения также становятся неодинаковыми, и в результате взаимодействия токов статора и ротора на роторы датчика и приемника действуют электромагнитные моменты MR и Мп. Пользуясь известными правилами для определения направлений ЭДС и электромагнитных сил, легко выяснить, что моменты, действующие на роторы датчика и приемника, направлены в противоположные стороны и под их влиянием угол рассогласования уменьшается.
При моменте сопротивления на валу приемника, равном нулю, ротор этого сельсина занимает в точности такое же положение, как ротор датчика, и угол др = 0.
В реальных устройствах на ротор сельсина-приемника действует небольшой тормозной момент, который складывается из момента от трения в подшипниках, на контактных кольцах, а также момента сопротивления механизма, соединенного с валом сельсина (стрелки указательного прибора-индикатора, перемешаемого контакта потенциометра и др.). Поэтому всегда имеется некоторая ошибка Др в передаче угла. К возникновению определенных погрешностей приводят также неточности в изготовлении, дискретная структура активного слоя магнитопроводов и т.п. В зависимости от класса точности сельсины позволяют осуществить передачу угла с максимальной допустимой ошибкой в пределах 0,25—2,5°.
К возникновению определенных погрешностей приводят также неточности в изготовлении, дискретная структура активного слоя магнитопроводов и т.п. В зависимости от класса точности сельсины позволяют осуществить передачу угла с максимальной допустимой ошибкой в пределах 0,25—2,5°.
В бесконтактных сельсинах получили распространение две модификации: неявнополюсные сельсины с кольцевым трансформатором и сельсины с когтеобразными полюсами. В первой модификации для питания однофазной обмотки возбуждения В, расположенной на роторе, используется кольцевой трансформатор, устроенный так же, как в бесконтактных поворотных трансформаторах. Во второй модификации (рис. 2) обмотка возбуждения 3 и обмотка синхронизации 4 располагаются на статоре, а ротор, опирающийся на подшипники 8, выполняется без обмоток. Обмотка синхронизации 4 размещается в пазах статора 5, причем и обмотка, и магнитопровод по своей конструкции не отличаются от аналогичных элементов контактного сельсина. Разноименнополюсное поле возбуждения, сцепленное с обмоткой синхронизации, создается в этом сельсине неподвижной обмоткой возбуждения, состоящей из двух кольцеобразных катушек 3.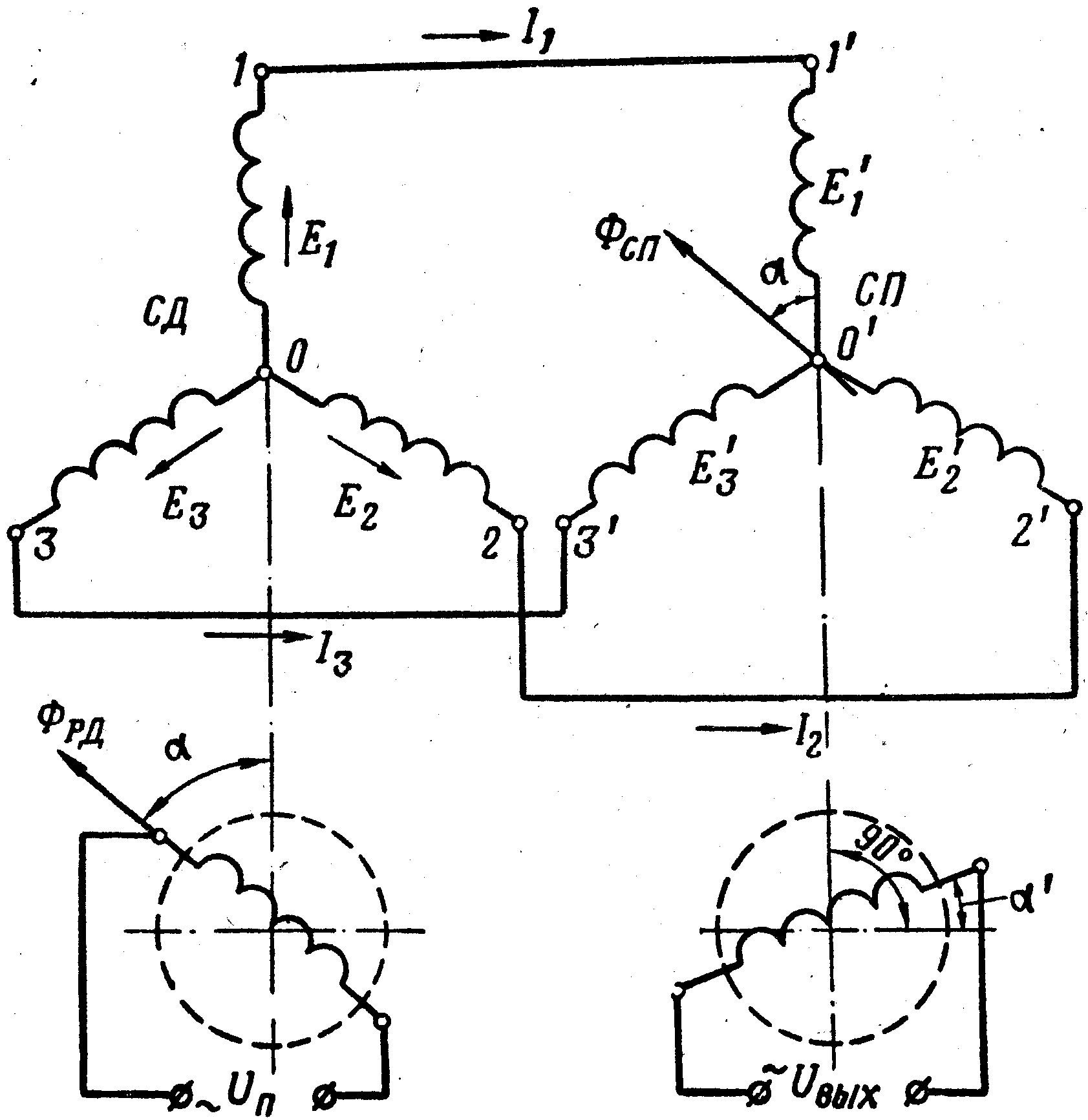 Катушки 3 питаются переменным током и образуют пульсирующий магнитный поток, который замыкается вокруг катушек по пути, показанному на рис. 2 штриховой линией. Этот путь включает следующие участки: магнитный корпус статора 2, немагнитный зазор, правый когтеобразный полюс У, немагнитный зазор, зубцы и ярмо магнитопровода 5, немагнитный зазор, левый когтеобразный полюс 7, немагнитный зазор. Для того чтобы поток не мог пройти от одного полюса к другому, минуя магнитопровод 5 и не сцепляясь с обмоткой 4, между когтеобразными полюсами имеется большой немагнитный зазор, вал 7 также делают немагнитным. В целях исключения другого нежелательного пути для потока предусматривается большой немагнитный зазор 6 между магнитопроводом 5 и корпусом 2.
Катушки 3 питаются переменным током и образуют пульсирующий магнитный поток, который замыкается вокруг катушек по пути, показанному на рис. 2 штриховой линией. Этот путь включает следующие участки: магнитный корпус статора 2, немагнитный зазор, правый когтеобразный полюс У, немагнитный зазор, зубцы и ярмо магнитопровода 5, немагнитный зазор, левый когтеобразный полюс 7, немагнитный зазор. Для того чтобы поток не мог пройти от одного полюса к другому, минуя магнитопровод 5 и не сцепляясь с обмоткой 4, между когтеобразными полюсами имеется большой немагнитный зазор, вал 7 также делают немагнитным. В целях исключения другого нежелательного пути для потока предусматривается большой немагнитный зазор 6 между магнитопроводом 5 и корпусом 2.
Рис. 2. Устройство бесконтактного однофазного сельсина
Благодаря такой конструкции поле в магнитопроводе статора изменяется при повороте ротора так же, как в обычном контактном сельсине.
К числу достоинств бесконтактных сельсинов относятся повышенная надежность, большая точность; их недостатками являются усложнение конструкции, увеличенные размеры и масса.
Сельсины: назначение и конструкция
Среди множества электрических машин существует особая разновидность, с помощью которых в синхронных системах осуществляется дистанционная передача угла. Они известны как сельсины, назначение и конструкция этих устройств разделяет их на датчики и приемники.
Общее устройство сельсина
Данные системы способны синхронно и плавно передавать на расстояние необходимые угловые величины. Механическая связь между ними отсутствует, а все передачи выполняются за счет электрических соединений, выступающих в качестве линий связи. Мощность таких приборов находится в пределах от нескольких ватт до 1 кВт, поэтому они могут использоваться для решения многих технических задач.
В конструкцию каждого сельсина входит статор и ротор с обмотками переменного тока. В соответствии со своими особенностями, эти устройства конструктивно могут состоять из следующих элементов:
- Обмотка с одной катушкой на статоре и с тремя – на роторе.
- Обмотка с тремя катушками на статоре и с одной – на роторе.
- Обмотка с тремя катушками на статоре и с тремя – на роторе.
Как видно из представленной схемы, сельсины, задействованные в схемах автоматических регулировок, разделяются на следующие категории:
- Сельсин-датчики.
- Сельсин-приемники.
- Дифференциальные сельсины.
Основной функцией этих устройств является синхронный поворот или вращение двух или нескольких осей, не имеющих между собой механической связи. Аппарат, механически связанный с ведущей осью, считается датчиком, а другой такой же прибор, соединенный с ведомой осью называется приемником. Когда ротор датчика поворачивается на какой-то угол, то ротор приемника синхронно выполняет поворот на такой же угол.
Каждый сельсин имеет обмотки, разделяющиеся на первичную – обмотку возбуждения и вторичную – обмотку синхронизации. В зависимости от количества фаз первичной обмотки, устройства могут быть одно- или трехфазными. Вторичная обмотка практически всегда выполняется в трехфазном варианте.
Расположение первичной и вторичной обмотки не влияет на принцип работы сельсин-устройств. Тем не менее, обмотку синхронизации принято устанавливать на статоре, а обмотку возбуждения на роторе. Такое размещение позволяет снизить количество контактных колец и повысить общую надежность устройства.
Принцип действия различных схем
Принцип действия системы наглядно виден на схемах, представленных на рисунке. На схеме «а» датчик и приемник подключены через статорные однокатушечные обмотки к единой сети переменного тока, а обмотки ротора с тремя катушками соединяются друг с другом. Получается система «датчик-приемник». При повороте ротора сельсин-датчика на какую-либо величину угла, ротор приемника повернется на точно такой же угол.
Основой синхронной связи является электромагнитная индукция. Под действием переменного тока обмотки статора, в роторной обмотке индуктируются токи, на величину которых оказывает влияние расположение обмоток статора и ротора относительно друг друга.
Когда роторы в обоих сельсин-устройствах располагаются одинаково относительно статоров, токи в проводах, соединяющий роторы будут при общем равенстве противоположны между собой. Поэтому в каждой катушке ток будет равен нулю. Следовательно валы сельсинов находятся в состоянии покоя и их вращающий момент также равен нулю.
При повороте ротора сельсин-датчика на какой-то угол, данное равновесие токов нарушается и на валу приемника появится вращающий момент. Его ротор будет вращаться до полного исчезновения неравновесия токов. Это неравновесие исчезнет, когда ротор сельсин-приемника примет такое же положение, что и ротор датчика.
В автоматическом регулировочном режиме довольно часто требуется работа приемника в режиме трансформатора. На схеме «б» видно, что ротор приемника закреплен неподвижно, а обмотка статора отключена от сети. Далее в ней будет индуктироваться ЭДС под влиянием тока, протекающего по обмоткам ротора. Величина этого тока будет зависеть от положения ротора датчика. То есть величина ЭДС ротора приемника будет находиться в пропорции с углом поворота сельсин-датчика. В исходном положении оба ротора смещаются на 90 градусов между собой, поэтому ЭДС на роторе датчика будет равна нулю. Таким образом, поворот ротора датчика вызовет индукцию ЭДС на роторе приемника, пропорциональной углу рассогласования обоих роторов.
То есть величина ЭДС ротора приемника будет находиться в пропорции с углом поворота сельсин-датчика. В исходном положении оба ротора смещаются на 90 градусов между собой, поэтому ЭДС на роторе датчика будет равна нулю. Таким образом, поворот ротора датчика вызовет индукцию ЭДС на роторе приемника, пропорциональной углу рассогласования обоих роторов.
Схема «в» отображает работу дифференциального сельсина, который используется для контроля разницы углов поворота сразу двух осей. Два датчика располагаются на двух отдельных валах с одинаковыми скоростями вращения. Третий сельсин-датчик является дифференциальным, а его угол поворота представляет собой разницу между углами поворота датчиков.
Конструктивные особенности
Конструктивно синхронизирующие сельсины могут быть контактными и бесконтактными. В первом случае соединение роторной обмотки с внешней электрической цепью осуществляется с помощью щеток и контактных колец. Устройство контактных сельсинов напоминает асинхронный двигатель с маломощным фазным ротором.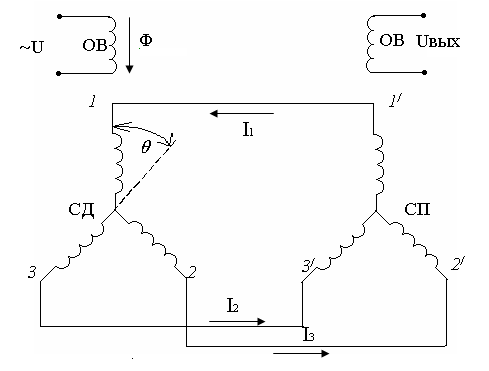
Статоры и роторы таких сельсинов считаются неявнополюсными, а обмотки – распределенными. На роторе располагается обмотка возбуждения, к которой электрический ток подведен посредством двух контактных колец. Некоторые виды устройств имеют явно выраженные полюса статоров и роторов, что существенно повышает их синхронизирующий момент.
В процессе эксплуатации сельсинов контактные кольца постепенно изнашиваются и требуют замены. Этот фактор считается единственным серьезным недостатком данных устройств. Бесконтактные сельсины, назначение и конструкция которых предполагает отсутствие контактных элементов, имеют две обмотки, размещенные на статоре. Сам ротор представляет собой цилиндр, изготовленный из ферромагнитного материала. Специальная алюминиевая прослойка разделяет ротор на два полюса, изолированных друг от друга.
В торцах устройства установлены сердечники, для изготовления которых использовалась листовая электротехническая сталь. Поверхность этих сердечников со стороны внутренней части размещается над ротором.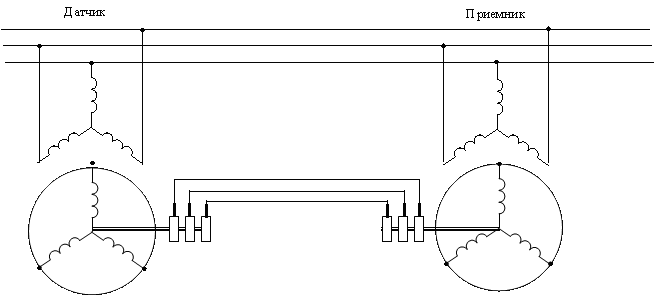 Наружная поверхность смыкается со стержнями внешнего магнитопровода.
Наружная поверхность смыкается со стержнями внешнего магнитопровода.
Однофазная обмотка возбуждения представляет собой двухдисковые катушки, расположенные по обеим сторонам статора, между обмоткой синхронизации и сердечниками.
Во время работы бесконтактного сельсина происходит замыкание импульсного магнитного потока в магнитной системе. Одновременно он соединяется с трехфазной синхронизирующей статорной обмоткой. Весь путь замкнутого магнитного потока обозначен на рисунке прерывистой линией.
При повороте ротора ось магнитного потока изменяет свою позицию по отношению к синхронизирующим обмоткам. Поэтому ЭДС, возникающая в фазах синхронизирующей обмотки, находится в прямой зависимости от поворота ротора. В этом заключается принцип работы таких приборов.
Существенным недостатком бесконтактных сельсинов считается слабое и малоэффективное использование активных материалов. Масса таких моделей примерно в 1,5 раза превышает контактные конструкции, в основном из-за существенных воздушных зазоров.![]() В результате, бесконтактные сельсины отличаются более высокими токами намагничивания и рассеивающими потоками.
В результате, бесконтактные сельсины отличаются более высокими токами намагничивания и рассеивающими потоками.
Что такое сельсин? | БЛОГ ЭЛЕКТРОМЕХАНИКА
Для дистанционной передачи различных измерений и показаний, команд, а также для дистанционного и автоматического управления на судах широко применяют системы синхронной передачи, выполненные на базе однофазных электрических машин (сельсинов).
Рис. 1. Контактный сельсин:
1 — ротор; 2 — первичная обмотка; 3 — успокоительная обмотка; 4 — статор; 5 — трехфазная обмотка; 6 — контактные кольца
Сельсины по конструктивному исполнению делятся на контактные и бесконтактные. В системах синхронных передач их применяют в качестве датчиков и приемников. Сельсин представляет собой асинхронную машину с первичной однофазной обмоткой возбуждения и трехфазной вторичной обмоткой синхронизации.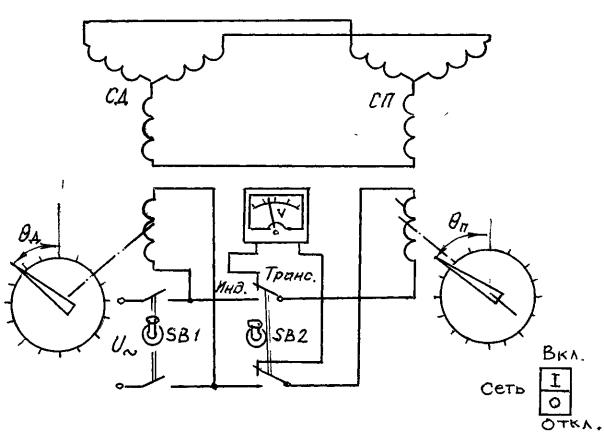
Контактные сельсины
На судах широко применяют в качестве датчиков контактные сельсины серии «Нептун» типа ДН-500. К такому сельсину одновременно можно подключить до 10 приемников. Однофазная первичная обмотка сельсина (рис.1) расположена на явнополюсном роторе, а трехфазная вторичная — на статоре. Концы первичной обмотки присоединены к выводам через два контактных Кольца и медно-графитные щетки, сидящие в гнездах пластмассовой траверсы.
Концы трехфазной обмотки соединены непосредственно с выводами. В пазы полюсных выступов ротора уложена успокоительная обмотка, предназначенная для гашения колебаний ротора относительно его синхронного положения. Эта обмотка состоит из двух отдельных короткозамкнутых витков, ось которых сдвинута относительно оси обмотки возбуждения на 90°.
Существенным недостатком контактных сельсинов является наличие скользящего контакта, что в значительной степени уменьшает их надежность, поэтому на современных судах в качестве сельсинов-приемников широко применяют бесконтактные сельсины типа БС-500.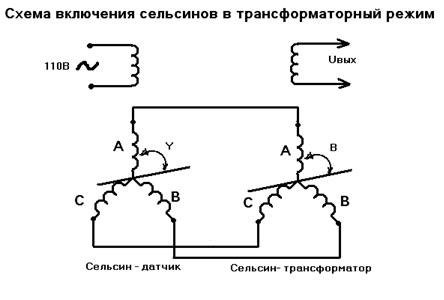
Бесконтактные сельсины
По принципу действия бесконтактные сельсины аналогичны контактным. Разница заключается в том, что у бесконтактных сельсинов однофазная первичная и трехфазная вторичная обмотки расположены на статоре, а ротор имеет специальную конструкцию.
У бесконтактного сельсина (рис. 2) в пазах статора уложена вторичная трехфазная обмотка. Ротор имеет форму барабана с двумя явно выраженными полюсами П1 и П2, набранными из листов электротехнической стали. Средняя часть ротора выполнена, из немагнитного материала. На внешнем неподвижном магнитопроводе, набранном из листов электротехнической стали, размещена первичная однофазная обмотка.
Магнитный поток Ф, созданный первичной обмоткой, проходит через внешний магнитопровод, воздушный зазор δ2, полюс П2 ротора, воздушный зазор δ1, в точке А статора разветвляется и двумя ветвями идет в верхнюю половину статора до точки В, где соединяется и проходит через воздушный зазор 6i к полюсу П1 ротора, и далее через зазор δ1 возвращается во внешний магнитопровод. Таким образом первичная и вторичная обмотки оказываются во взаимно перпендикулярных плоскостях. Поток первичной обмотки непосредственно не пересекает вторичную обмотку, минуя ротор, поэтому э. д. с. вторичной обмотки зависит от положения ротора.
Таким образом первичная и вторичная обмотки оказываются во взаимно перпендикулярных плоскостях. Поток первичной обмотки непосредственно не пересекает вторичную обмотку, минуя ротор, поэтому э. д. с. вторичной обмотки зависит от положения ротора.
Рис. 2. Бесконтактный сельсин:
1 — магнитопровод; 2 — ротор; 3 — статор; 4, 5 —трехфазная и однофазная обмотки
Сельсины могут работать в индикаторном, трансформаторном и дифференциальном режимах.
При работе в индикаторном режиме первичные обмотки датчика и приемника включены в сеть, а вторичные — соединены между собой встречно. При повороте ротора датчика на определенный угол под действием уравнительных токов ротор приемника разворачивается точно на такой же угол.
В трансформаторном режиме ротор приемника заторможен, а первичная обмотка, отключенная от сети, используется как вторичная обмотка трансформатора. Величина и фаза э. д. с. этой обмотки зависят от угла и направления поворота ротора датчика,
В дифференциальном режиме в качестве приемника используется сельсин с трехфазными первичной и вторичной обмотками. Обе обмотки подключены к трехфазным вторичным обмоткам двух датчиков. Угол поворота ротора приемника определяется суммой или разностью углов поворота роторов датчиков.
Обе обмотки подключены к трехфазным вторичным обмоткам двух датчиков. Угол поворота ротора приемника определяется суммой или разностью углов поворота роторов датчиков.
⇓ДОБАВИТЬ В ЗАКЛАДКИ⇓
⇒ВНИМАНИЕ⇐
- Материал на блоге⇒ Весь материал предоставляется исключительно в ознакомительных целях! При распространении материала используйте пожалуйста ссылку на наш блог!
- Ошибки⇒ Если вы обнаружили ошибки в статье, то сообщите нам через контакты или в комментариях к статье. Мы будем очень признательны!
- Файлообменники⇒ Если Вам не удалось скачать материал по причине нерабочих ссылок или отсутствующих файлов на файлообменниках, то сообщите нам через контакты или в комментариях к статье.
- Правообладателям⇒ Администрация блога отрицательно относится к нарушению авторских прав на www.electroengineer.ru. Поэтому, если Вы являетесь правообладателем исключительных прав на любой материал, предоставленный на ресурсе, то сообщите нам через контакты и мы моментально примем все действия для удаления Вашего материала.

⇓ОБСУДИТЬ СТАТЬЮ⇓
Сельсин БД-160 А от «ИП Чуваев А.В» и ООО «ТД Акватория», omsksnab@bk.ru 8-960-988-26-56. Всегда в наличии большой ассортимент! Гибкая система скидок! Индивидуальный подход к каждому клиенту!
Сельсин БД-160А. Цена указана без НДС.
Бесконтактный сельсин БД160А относится к группе бесконтактных сельсинов (работают без скользящих контактов). Такой принцип работы обеспечивает данным сельсинам высокую точность, а главное увеличивает их срок службы.
Сельсин БД-160А работает от напряжения 110В.
При подаче напряжения на бесконтактный сельсин, происходит вращение вала. Эти сельсины имеют три обмотки синхронизации и одинаковую обмотку возбуждения.
Бесконтактные сельсины БД-160А имеют также больший вес, в отличии от контактных сельсинов, так как у них большие воздушные зазоры, вследствии чего образуется больший поток рассеивания и намагничивающийся ток. Сельсин БД-160А используются для применения в качестве трансформатора-приемника в синхронных передачах и для измерения угла рассогласования в следящих системах.
Характеристики сельсина БД-160А:
- Напряжение питания — 110В;
- Потребляемая мощь, не более — 10Вт;
- Потребляемый ток, не более — 0,3А;
- Масса, не более — 0,48кг;
- Общий гарантийный срок хранения и эксплуатации — 6,5 лет.
- класс А, ЛШ3.153.000
- Делаем доставку по городам и регионам: Москва, Тверь, Тула, Брянск, Липецк, Смоленск, Нижний Новгород, Ярославль, Вологда, Санкт-Петербург, Петрозаводск, Казань, Ульяновск, Пенза, Самара, Саратов, Волгоград, Ростов-на-Дону, Краснодар, Ставрополь, Владикавказ, Махачкала, Уфа, Оренбург, Челябинск, Мурманск, Салехард, Ханты-Мансийск, Омск, Тюмень, Барнаул, Абакан, Красноярск, Иркутск, Чита, Хабаровск, Владивосток, Майкоп, Улан-Удэ, Горно-Алтайск, Назрань, Нальчик, Элиста, Черкесск, Петрозаводск, Сыктывкар, Йошкар-Ола, Саранск, Якутск, Казань, Кызыл, Ижевск, Чебоксары, Благовещенск, Архангельск, Астрахань, Белгород, Владимир, Воронеж, Иваново, Калининград, Калуга, Петропавловск-Камчатский, Кемерово, Киров, Кострома, Курган, Курск, Магадан, Великий Новгород, Новосибирск, Орел, Пермь, Псков, Рязань, Южно-Сахалинск, Екатеринбург, Тамбов, Томск, Анадырь и т. д.
 д.
д.Сельсины | Техника и Программы
Сельсины — это устройства, похожие на небольшие электродвигатели, но в отличие от последних не вращающиеся непрерывно при подаче на них электроэнергии. Эти устройства выполняют функцию преобразования, т. е. могут преобразовать информацию о положении в электрический сигнал, при помощи которого можно дистанционно воспроизвести идентичное механическое состояние. Таким образом, сельсины, или синхронные устройства, могут преобразовывать механическую величину в электрическую и наоборот.
Сельсины благодаря их передаточным характеристикам можно использовать для передачи данных путем преобразования информации о положении вала в электрические сигналы и передачи их по проводам. В месте приема при помощи этих сигналов другой вал устанавливается в положение, соответствующее положению первого вала. Это позволяет осуществлять синхронное вращение валов без механического соединения между яими. Следует, однако, иметь в виду, что сельсины не могут развивать большого вращающего момента. Поэтому в некоторых случаях вращающий момент на втором валу требуется усиливать с тем, чтобы он имел достаточную величину для преодоления нагрузки на валу. Используемые для этой цели устройства называют сервомеханизмами. В тех случаях, когда требуется дистанционно воспроизвести только показание какой-либо шкалы, усиливать вращающий момент вала не требуется.
Поэтому в некоторых случаях вращающий момент на втором валу требуется усиливать с тем, чтобы он имел достаточную величину для преодоления нагрузки на валу. Используемые для этой цели устройства называют сервомеханизмами. В тех случаях, когда требуется дистанционно воспроизвести только показание какой-либо шкалы, усиливать вращающий момент вала не требуется.
Сельсины бывают трех основных типов. Сельсины, которые вырабатывают сигнал посредством изменения угла поворота, называют генератором или сельсин-датчиком. Сельсин, расположенный на .некотором расстоянии от первого и принимающий его сигналы, называют мотором или сельсин-приемником.
Если между генератором и мотором применяется промежуточный сельсин, то его называют дифференциальным сельсином. Схема и рабочие характеристики дифференциального сельсина .будут рассмотрены ниже.
Синхрогенераторы и моторы имеют по пять внешних выходов (рис. 13.11,а). Соединение генератора и мотора показано на рис. 13.11,6. Заметим, что символы мотора и генератора идентичны и соответствующие выводы, обозначенные через S, соединяются между собой. Питающее напряжение подводится к выводам обмотки ротора, обозначенным Ri и R2. Обмотка ротора эквивалентна первичной обмотке трансформатора. Три вторичные обмотки обозначены на рисунке символами 5Ь 52 и 53. Эти обмотки расположены в статоре и сдвинуты относительно друг друга на 120°. (Пространственный сдвиг обмоток не означает, что используется трехфазный ток; для питания здесь применяется однофазный ток.)
Питающее напряжение подводится к выводам обмотки ротора, обозначенным Ri и R2. Обмотка ротора эквивалентна первичной обмотке трансформатора. Три вторичные обмотки обозначены на рисунке символами 5Ь 52 и 53. Эти обмотки расположены в статоре и сдвинуты относительно друг друга на 120°. (Пространственный сдвиг обмоток не означает, что используется трехфазный ток; для питания здесь применяется однофазный ток.)
Если сельсин-датчик и сельсин-приемник соединить между собой, как показано на рис. 13.11., б, и вал сельсин-датчика установить в нулевое положение, то вал сельсин-приемника также займет это положение благодаря воздействию электрических сигналов, поступающих в сельсин-датчик. Заметим, что для соединения сельсин-датчика с сельсин-приемником требуются три провода. В нулевом положении осевой полюс обмотки ротора совмещен с осевым полюсом обмотки статора S2, как показано на рисунке.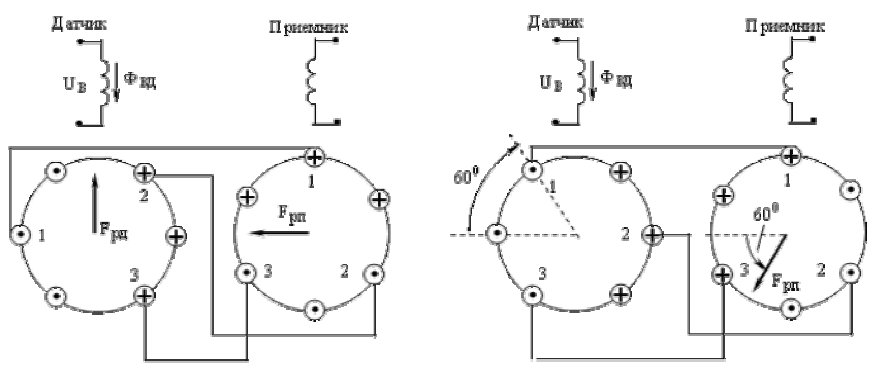 В этом положении имеет место трансформаторное действие, и напряжение 120 В, подаваемое на первичную обмотку (обмотку ротора), индуцирует на обмотке статора 52 напряжение 50 В. В этом положении напряжения, наводимые в обмотках Si и 53, будут меньше и равны 25 В. Далее между сельсин-датчиком и сельсин-приемником должно установиться равновесие напряжений. При этом ротор сельсин-приемника займет точно такое же положение, что и ротор сельсин-датчика. Следовательно, ось первичной обмотки сельсин-приемника совместится с осью обмотки 52 статора. В этом положении между сельсин-датчиком и сельсин-приемником ни по одному из трех проводов не будет протекать ток. Если вал сельсин-датчика изменит свое положение, то будет иметь место разбаланс напряжений между обмотками сельсин-датчика и сельсин-приемника, в результате чего ротор сельсин-приемника займет то же положение, что и ротор сельсин-датчика. При этом вновь установится равновесие напряжений.
В этом положении имеет место трансформаторное действие, и напряжение 120 В, подаваемое на первичную обмотку (обмотку ротора), индуцирует на обмотке статора 52 напряжение 50 В. В этом положении напряжения, наводимые в обмотках Si и 53, будут меньше и равны 25 В. Далее между сельсин-датчиком и сельсин-приемником должно установиться равновесие напряжений. При этом ротор сельсин-приемника займет точно такое же положение, что и ротор сельсин-датчика. Следовательно, ось первичной обмотки сельсин-приемника совместится с осью обмотки 52 статора. В этом положении между сельсин-датчиком и сельсин-приемником ни по одному из трех проводов не будет протекать ток. Если вал сельсин-датчика изменит свое положение, то будет иметь место разбаланс напряжений между обмотками сельсин-датчика и сельсин-приемника, в результате чего ротор сельсин-приемника займет то же положение, что и ротор сельсин-датчика. При этом вновь установится равновесие напряжений.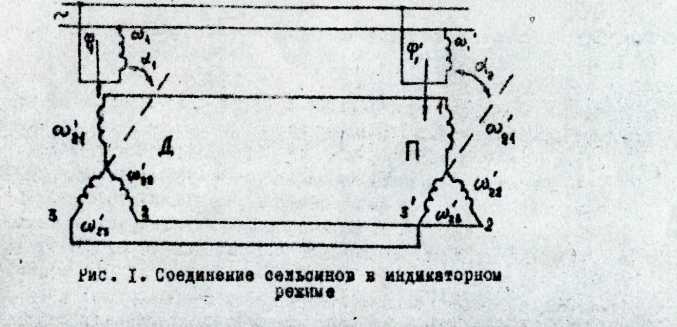 В течение времени, когда ротор сельсин-приемника движется в положение, соответствующее положению ротора сельсин-датчика, в соединительных проводах протекает ток. Когда же роторы сельсин-приемника и сельсин-датчика имеют одинаковое положение, протекание тока прекращается. Протекание тока и, следовательно, потребление энергии необходимо для создания вращающего момента, который восстанавливает ротор сельсин-приемника в положение, соответствующее положению ротора сельсин-датчика.
В течение времени, когда ротор сельсин-приемника движется в положение, соответствующее положению ротора сельсин-датчика, в соединительных проводах протекает ток. Когда же роторы сельсин-приемника и сельсин-датчика имеют одинаковое положение, протекание тока прекращается. Протекание тока и, следовательно, потребление энергии необходимо для создания вращающего момента, который восстанавливает ротор сельсин-приемника в положение, соответствующее положению ротора сельсин-датчика.
Рис. 13.11. Вид сельсина (с) и схема соединения сельсин-датчика и сельсин-приемника (б).
Дистанционное зондирование и индикация
Часто непрактично или невозможно использовать датчики прямого считывания для информации, необходимой для передачи в кабине. Размещение датчиков в наиболее подходящем месте на планере или двигателе и электрическая передача собранных данных по проводам на дисплеи в кабине экипажа — широко используемый метод дистанционного зондирования и индикации на самолетах.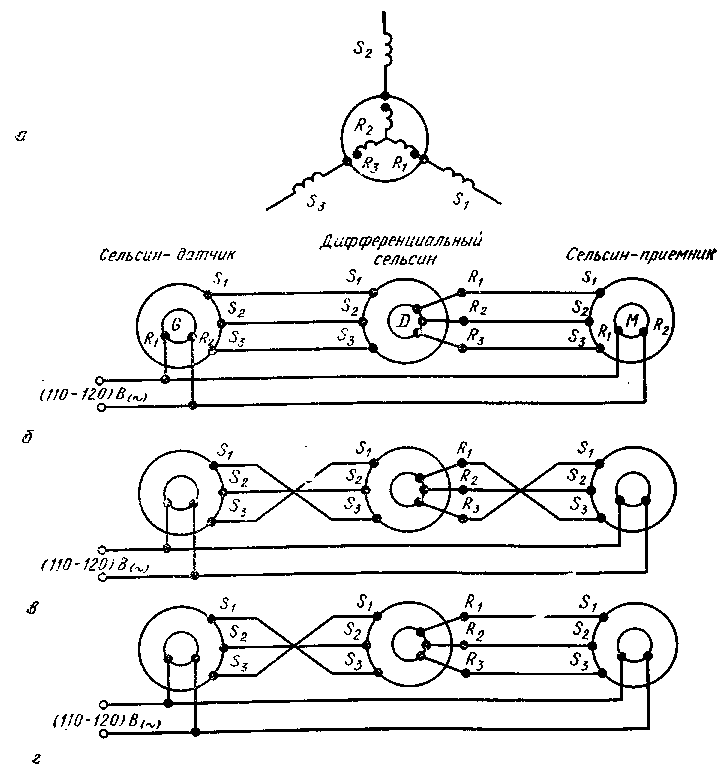 Многие инструментальные системы дистанционного зондирования состоят просто из блока датчиков и передатчика и индикаторного блока кабины, соединенных друг с другом проводами.Для приборов, работающих под давлением, АЦП и приемные устройства (трубки Пито, статические вентиляционные отверстия и т. Д.) Составляют блок датчиков и передатчиков. Многие самолеты собирают данные с датчиков на специальных компьютерах для двигателей и планера. Там информацию можно обработать. Затем выходной блок компьютера передает его в кабине в электрическом или цифровом виде для отображения. Приборные системы дистанционного зондирования работают с высокой надежностью и точностью. Они питаются от электрической системы самолета.
Многие инструментальные системы дистанционного зондирования состоят просто из блока датчиков и передатчика и индикаторного блока кабины, соединенных друг с другом проводами.Для приборов, работающих под давлением, АЦП и приемные устройства (трубки Пито, статические вентиляционные отверстия и т. Д.) Составляют блок датчиков и передатчиков. Многие самолеты собирают данные с датчиков на специальных компьютерах для двигателей и планера. Там информацию можно обработать. Затем выходной блок компьютера передает его в кабине в электрическом или цифровом виде для отображения. Приборные системы дистанционного зондирования работают с высокой надежностью и точностью. Они питаются от электрической системы самолета.
Маленькие электродвигатели внутри инструментальных корпусов используются для позиционирования указателей вместо механических рычагов прямого действия.Они получают электрический ток от выходной секции АЦП или других компьютеров. Они также получают входные данные от измерительных передатчиков или датчиков, удаленно расположенных на борту самолета. Изменяя электрический сигнал, двигатели поворачиваются в точное положение, необходимое для отображения правильной индикации. Прямая электрическая передача информации от различных типов датчиков осуществляется с помощью нескольких надежных и относительно простых методов. Обратите внимание, что цифровые дисплеи кабины пилота получают все данные от ЦАП и других компьютеров через шину цифровых данных и не используют электродвигатели.Пакеты данных, передаваемые по шине, содержат инструкции по освещению экрана дисплея.
Изменяя электрический сигнал, двигатели поворачиваются в точное положение, необходимое для отображения правильной индикации. Прямая электрическая передача информации от различных типов датчиков осуществляется с помощью нескольких надежных и относительно простых методов. Обратите внимание, что цифровые дисплеи кабины пилота получают все данные от ЦАП и других компьютеров через шину цифровых данных и не используют электродвигатели.Пакеты данных, передаваемые по шине, содержат инструкции по освещению экрана дисплея.
Дистанционные индикаторы синхронного типа
Синхросистема — это электрическая система, используемая для передачи информации из одной точки в другую. Слово «синхронный» — это сокращенная форма слова «синхронный» и относится к любой из ряда аналогичных работающих двухблочных электрических систем, способных измерять, передавать и указывать определенный параметр на летательном аппарате.Большинство приборов для индикации положения спроектировано вокруг системы синхронизации, такой как индикатор положения закрылков. Индикаторы давления жидкости также обычно используют синхронизирующие системы. Системы Synchro используются в качестве дистанционных индикаторов положения для шасси, систем автопилота, радаров и многих других приложений дистанционной индикации. Наиболее распространенными типами синхронных систем являются автосинхронные, сельсиновые и магнесиновые.
Индикаторы давления жидкости также обычно используют синхронизирующие системы. Системы Synchro используются в качестве дистанционных индикаторов положения для шасси, систем автопилота, радаров и многих других приложений дистанционной индикации. Наиболее распространенными типами синхронных систем являются автосинхронные, сельсиновые и магнесиновые.
Эти системы похожи по конструкции, и все они работают, используя постоянную взаимосвязь между электричеством и магнетизмом.Тот факт, что электричество можно использовать для создания магнитных полей, имеющих определенное направление, и что магнитные поля могут взаимодействовать с магнитами и другими электромагнитными полями, является основой их работы.
DC Selsyn Systems
На самолетах с электрическими системами постоянного тока (DC) широко используется система DC Selsyn. Как уже упоминалось, сельсин-система состоит из передатчика, индикатора и соединительных проводов. Передатчик состоит из круглой обмотки сопротивления и поворотного контактного плеча. Поворотный контактный рычаг вращается на валу в центре обмотки сопротивления. Два конца рычага являются щетками и всегда касаются обмотки с противоположных сторон. [Рисунок 10-47] В системах индикации положения вал, к которому прикреплен контактный рычаг, выступает через конец корпуса передатчика и прикреплен к блоку, положение которого должно передаваться (например, закрылкам, шасси). Передатчик часто соединяется с подвижным узлом с помощью механической связи. Когда устройство движется, он заставляет вращаться вал передатчика.Плечо поворачивается так, что напряжение через щетки подается к любым двум точкам по окружности обмотки сопротивления. Вал ротора сельсин-систем постоянного тока, измеряющих другие виды данных, работает таким же образом, но не может выступать за пределы корпуса. Чувствительное устройство, сообщающее вращательное движение валу, может быть расположено внутри корпуса передатчика.
Поворотный контактный рычаг вращается на валу в центре обмотки сопротивления. Два конца рычага являются щетками и всегда касаются обмотки с противоположных сторон. [Рисунок 10-47] В системах индикации положения вал, к которому прикреплен контактный рычаг, выступает через конец корпуса передатчика и прикреплен к блоку, положение которого должно передаваться (например, закрылкам, шасси). Передатчик часто соединяется с подвижным узлом с помощью механической связи. Когда устройство движется, он заставляет вращаться вал передатчика.Плечо поворачивается так, что напряжение через щетки подается к любым двум точкам по окружности обмотки сопротивления. Вал ротора сельсин-систем постоянного тока, измеряющих другие виды данных, работает таким же образом, но не может выступать за пределы корпуса. Чувствительное устройство, сообщающее вращательное движение валу, может быть расположено внутри корпуса передатчика.
Рисунок 10-47. Схема системы дистанционной индикации сельсин-синхронизма постоянного тока.
Ссылаясь на Рисунок 10-47, обратите внимание, что резистивная обмотка передатчика отводится в трех фиксированных местах, обычно на расстоянии 120 ° друг от друга.Эти отводы распределяют ток по тороидальным обмоткам двигателя индикатора. Когда ток течет через эти обмотки, создается магнитное поле. Как и все магнитные поля, существует определенное северное и южное направление поля. При вращении вала ротора передатчика рычаг контакта подачи напряжения перемещается. Поскольку он контактирует с резистивной обмоткой передатчика в разных положениях, сопротивление между питающим плечом и различными ответвлениями изменяется. Это вызывает изменение напряжения, протекающего через ответвления, по мере того, как сопротивление секций обмотки становится длиннее или короче.В результате переменный ток подается через ответвления к трем обмоткам двигателя индикатора.
Результирующее магнитное поле, создаваемое током, протекающим через индикаторные катушки, изменяется, когда каждая из них получает переменный ток от ответвлений. Также меняется направление магнитного поля. Таким образом, направление магнитного поля через индикаторный элемент соответствует положению движущегося плеча в передатчике. Постоянный магнит прикреплен к центрированному валу ротора в индикаторе, как и стрелка индикатора.Магнит выравнивается по направлению магнитного поля, и указатель тоже. Каждый раз, когда магнитное поле меняет направление, постоянный магнит и указатель выравниваются в соответствии с новым положением поля. Таким образом, указывается положение устройства самолета.
Также меняется направление магнитного поля. Таким образом, направление магнитного поля через индикаторный элемент соответствует положению движущегося плеча в передатчике. Постоянный магнит прикреплен к центрированному валу ротора в индикаторе, как и стрелка индикатора.Магнит выравнивается по направлению магнитного поля, и указатель тоже. Каждый раз, когда магнитное поле меняет направление, постоянный магнит и указатель выравниваются в соответствии с новым положением поля. Таким образом, указывается положение устройства самолета.
Шасси содержит механические устройства, которые блокируют шестерню вверх, так называемая блокировка вверх, или вниз, называемая блокировкой вниз. Когда система сельсина постоянного тока используется для индикации положения шасси, индикатор также может показывать, что включена фиксация вверх или вниз.Для этого снова меняют ток, протекающий через катушки индикатора. Выключатели, расположенные на самих запорных устройствах, закрываются при срабатывании замков. Ток от системы сельсина, описанной выше, протекает через переключатель и небольшую дополнительную цепь. Схема добавляет дополнительный резистор к одной из секций обмотки передатчика, созданной плечом ротора и ответвлением. Это изменяет общее сопротивление этой секции. В результате изменяется ток, протекающий через одну из катушек двигателя индикатора.Это, в свою очередь, изменяет магнитное поле вокруг этой катушки. Следовательно, комбинированное магнитное поле, создаваемое всеми тремя катушками двигателя, также подвергается влиянию, вызывая смещение направления магнитного поля индикатора. Постоянный магнит и указатель выровняются в новом направлении и переместятся в заблокированное положение на шкале индикатора. На Рис. 10-48 показана упрощенная схема переключателя блокировки в трехпроводной сельсиновой системе и шкалы индикатора.
Ток от системы сельсина, описанной выше, протекает через переключатель и небольшую дополнительную цепь. Схема добавляет дополнительный резистор к одной из секций обмотки передатчика, созданной плечом ротора и ответвлением. Это изменяет общее сопротивление этой секции. В результате изменяется ток, протекающий через одну из катушек двигателя индикатора.Это, в свою очередь, изменяет магнитное поле вокруг этой катушки. Следовательно, комбинированное магнитное поле, создаваемое всеми тремя катушками двигателя, также подвергается влиянию, вызывая смещение направления магнитного поля индикатора. Постоянный магнит и указатель выровняются в новом направлении и переместятся в заблокированное положение на шкале индикатора. На Рис. 10-48 показана упрощенная схема переключателя блокировки в трехпроводной сельсиновой системе и шкалы индикатора.
Рисунок 10-48. Цепь переключателя блокировки может быть добавлена к базовой системе сельсин-синхронизации постоянного тока, когда она используется для индикации положения шасси и состояний блокировки вверх и вниз на одном индикаторе. [щелкните изображение, чтобы увеличить]
[щелкните изображение, чтобы увеличить]
AC Synchro Systems
В самолетах с системами электропитания переменного тока (AC) используются дистанционные системы индикации autosyn или magnasysn synchro. Оба работают аналогично системе сельсина постоянного тока, за исключением того, что используется питание переменного тока. Таким образом, они используют электрическую индукцию, а не ток сопротивления, определяемый щетками ротора. В системах Magnasyn используются роторы с постоянными магнитами, подобные тем, которые используются в сельсин-системах постоянного тока.Обычно магнит передатчика больше, чем индикаторный магнит, но электромагнитный отклик магнита ротора индикатора и указателя остается неизменным. Он выравнивается с магнитным полем, создаваемым катушками, принимая тот же угол отклонения, что и ротор передатчика. [Рисунок 10-49] Рисунок 10-49. Синхронная система дистанционной индикации magnasysn использует переменный ток. Он имеет роторы с постоянными магнитами в передатчике и индикаторе.
Системы Autosyn отличаются еще и тем, что используемые роторы передатчика и индикатора являются электромагнитами, а не постоянными магнитами.Тем не менее, как и постоянный магнит, электромагнит выравнивается по направлению магнитного поля, создаваемого током, протекающим через катушки статора в индикаторе. Таким образом, положение указателя индикатора отражает положение ротора передатчика. [Рисунок 10-50] Рисунок 10-50. Система дистанционной индикации autosyn использует взаимодействие между магнитными полями, создаваемыми потоком электрического тока, для позиционирования указателя индикатора.
Синхронные системы переменного тока подключаются иначе, чем системы постоянного тока.Переменный ток протекает через передатчик, и катушки статора индикатора индуцируются, когда переменный ток проходит через ноль, и поток магнитного поля ротора может течь. Важная характеристика всех синхронизирующих систем поддерживается как автосинхронной, так и магносиновой системами. То есть положение ротора передатчика отражается ротором в индикаторе. Эти системы используются во многих из тех же приложений, что и системы постоянного тока, и многое другое. Поскольку они обычно являются частью приборов для высокопроизводительных самолетов, адаптации автосинхронных и магносинхронных систем часто используются в указателях поворота и в системах автопилота.
Эти системы используются во многих из тех же приложений, что и системы постоянного тока, и многое другое. Поскольку они обычно являются частью приборов для высокопроизводительных самолетов, адаптации автосинхронных и магносинхронных систем часто используются в указателях поворота и в системах автопилота.
Дистанционные индикаторы давления топлива и масла
Показания давления топлива и масла могут быть легко получены с помощью синхронизирующих систем. Как указывалось ранее, прокладка топливных и масляных магистралей в кабину для прямого считывания показаний датчиков нежелательна. Двумя основными сдерживающими факторами являются повышенный риск возгорания в кабине и дополнительный вес тросов.
Путем определения местоположения передатчика синхронизирующей системы дистанционно, давление жидкости может быть направлено в него без длинного участка трубопровода.Внутри датчика движение сильфона давления может быть передано ротору датчика таким образом, чтобы он вращался. [Рис. 10-51] Как и во всех синхронизаторах, ротор передатчика вращается пропорционально измеряемому давлению, которое изменяет напряжения, установленные в обмотках резистора синхронизатора. Эти напряжения передаются на индикаторные катушки, которые создают магнитное поле, устанавливающее указатель.
[Рис. 10-51] Как и во всех синхронизаторах, ротор передатчика вращается пропорционально измеряемому давлению, которое изменяет напряжения, установленные в обмотках резистора синхронизатора. Эти напряжения передаются на индикаторные катушки, которые создают магнитное поле, устанавливающее указатель.
Рисунок 10-51. Индикаторы дистанционного измерения давления изменяют линейное движение на вращательное в чувствительной части синхронизирующего передатчика.[щелкните изображение, чтобы увеличить] Часто на двухмоторных самолетах синхронизирующие механизмы для каждого двигателя могут использоваться для управления отдельными указателями на одном и том же индикаторе. Поместив катушки одна за другой, вал указателя от двигателя заднего индикатора можно направить через полый вал двигателя переднего индикатора. Таким образом, каждый указатель реагирует на выравнивание магнита в магнитном поле своего собственного двигателя, находясь в одном и том же корпусе датчика. Маркировка двигателя указателя 1 или 2 устраняет любые сомнения относительно того, какой указатель индикатора наблюдается.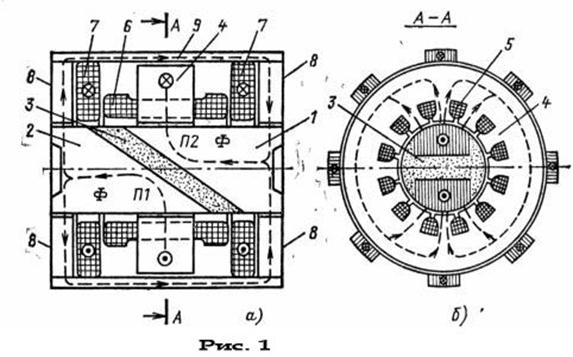 Аналогичный принцип используется в индикаторе, который имеет параллельные индикации для различных параметров, таких как давление масла и давление топлива в одном корпусе индикатора. У каждого параметра есть собственный синхронный двигатель для позиционирования его указателя.
Аналогичный принцип используется в индикаторе, который имеет параллельные индикации для различных параметров, таких как давление масла и давление топлива в одном корпусе индикатора. У каждого параметра есть собственный синхронный двигатель для позиционирования его указателя.
В самолетах с цифровыми приборами используются чувствительные к давлению твердотельные датчики, которые выводят цифровые сигналы для сбора и обработки специальными компьютерами двигателя и планера. Другие могут сохранить свои аналоговые датчики, но могут пересылать эту информацию через блок аналого-цифрового преобразователя, из которого соответствующий компьютер может получать цифровую информацию для обработки и освещения цифрового дисплея.Во многих других приборах используются синхронные системы дистанционной индикации, описанные в этом разделе, или аналогичные синхронизаторы. Иногда также используются простые, более подходящие или менее дорогие технологии.
Летный механик рекомендует
Подводные электрические системы — Глава 10
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ОПИСАНИЕ
ОПИСАНИЕ  Оба находятся под напряжением 115.
Оба находятся под напряжением 115.Учебное пособие по системе управления синхронным передатчиком и приемником
ВВЕДЕНИЕ
Термин «синхронизация» — это общее название семейства индуктивных устройств, которые работают по принципу вращающегося трансформатора (асинхронный двигатель).Торговые наименования синхронного оборудования — Selsyn, Autosyn и Telesyn. В основном это электромеханические устройства или электромагнитный преобразователь, который вырабатывает выходное напряжение в зависимости от углового положения ротора.
Синхронная система образуется путем соединения устройств, называемых синхронным передатчиком и трансформатором управления синхронизацией . Их также называют синхронными парами. Синхропара измеряет и сравнивает два угловых смещения, и ее выходное напряжение приблизительно линейно с угловой разностью осей обоих валов.Их можно использовать двумя способами.
и. Контролировать угловое положение груза с удаленного / большого расстояния.
ii. Для автоматической коррекции изменений из-за нарушения углового положения груза.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
☞Трансформатор — 230/50 В перем. Тока
☞Цифровой вольтметр — (0-300 В) переменного тока
Синхронный передатчик
☞Входное напряжение ротора — 50 В переменного тока
☞ Выходное напряжение статора — 34 В переменного тока (макс.)
Синхронный приемник
☞Напряжение статора — 34 В переменного тока (макс.)
☞Напряжение ротора — 35 В переменного тока
ПЕРЕДАТЧИК СИНХРО
Конструктивные особенности, электрическая схема и условное обозначение синхронного передатчика показаны на рисунке 2.Двумя основными частями синхронного преобразователя являются статор и ротор. Статоры идентичны статору трехфазного генератора переменного тока. Он изготовлен из многослойной кремнистой стали и имеет паз на внутренней периферии для размещения балансовой трехфазной обмотки. Обмотка статора концентрического типа, оси трех катушек разнесены на 120 °. Обмотка статора соединена звездой (Y-соединение).
Ротор выполнен в виде гантели с одной обмоткой. Концы обмотки ротора оканчиваются двумя контактными кольцами.Однофазное переменное напряжение возбуждения подается на ротор через контактные кольца.
Принципы работы
Когда ротор возбуждается переменным напряжением, в роторе протекает ток и создается магнитное поле. Магнитное поле ротора индуцирует ЭДС в обмотке статора за счет действия трансформатора. Эффективное напряжение, индуцированное в любой катушке статора, зависит от углового положения оси катушек относительно оси ротора.
Пусть er = Мгновенное значение переменного напряжения, приложенного к ротору.
e, e, es1s2 s3 = Мгновенное значение ЭДС, индуцированной в обмотках статора S, S, S относительно нейтрали 12 3 соответственно.
Er = максимальное значение напряжения возбуждения ротора.
T = Угловая частота напряжения возбуждения ротора.
K t = Передаточное отношение обмотки статора и ротора.
K c = Коэффициент связи.
2 = Угловое смещение ротора относительно опорной точки.
Мгновенное значение напряжения возбуждения, e = Er sinrTt —- (1)
Позвольте ротору вращаться против блокировки блокировки.При повороте ротора на угол в обмотках статора индуцируются 2 ЭДС. Частота наведенной ЭДС такая же, как частота ротора. Величина наведенной ЭДС пропорциональна коэффициенту поворотов и коэффициенту связи. Передаточное число K является постоянным, но коэффициент связи K является функцией углового положения ротора. т в
Наведенная ЭДС в обмотке статора = K K E с r T t—— (2)
СИНХРО ПЕРЕДАТЧИК / ПРИЕМНИК
Пусть e будет опорным вектором.Как показано на рисунке 2, когда 2 = 0, потокосцепление катушки s i равно нулю. Следовательно, потокосцепление катушки S является функцией cos22 (K = K) Cos c1 2 для катушки S). Потенциал 2 потока катушки S будет максимальным после поворота на 120 ° против часовой стрелки, а поток 3 катушки S после поворота на 240 ° .1
Коэффициент связи, К для змеевика — С1
Коэффициент связи, К для змеевика — С2
Коэффициент связи, К для змеевика — С3
Рисунок -3 Наведенная ЭДС в обмотках статора
Когда 2 = 0, из уравнения 3 можно сказать, что максимальная ЭДС индуцируется в катушке S.Но из уравнения 8 видно, что напряжение между катушкой и катушкой ES3S1 равно нулю. Это положение ротора определяется как электрический ноль преобразователя
.
СИНХРО ПЕРЕДАТЧИК / ПРИЕМНИК
угловое положение вала ротора и выхода представляет собой набор из трех напряжений между обмоткой статора. Измеряя и идентифицируя набор напряжений на выводах статора, можно определить угловое положение ротора. [Доступно устройство, называемое синхронно-цифровым преобразователем, для измерения напряжений статора и вычисления угловой меры, а затем для отображения направления и угла поворота ротора].
ТРАНСФОРМАТОР СИНХРО-УПРАВЛЕНИЯ
Строительство
Рисунок — Конструктивные особенности 4a
Конструктивные особенности трансформатора синхронного управления аналогичны конструктивным характеристикам синхронного преобразователя , за исключением формы ротора. Ротор управляющего трансформатора выполнен цилиндрическим, так что воздушный зазор практически однороден. Эта особенность управляющего трансформатора сводит к минимуму изменения импеданса ротора при вращении вала.Конструктивные особенности, электрическая схема и схематическое обозначение управляющего трансформатора показаны на рисунке 4.
рабочий
ЭДС, генерируемая синхронным передатчиком , подается на обмотки статора управляющего трансформатора. Вал ротора подсоединен к нагрузке, положение которой необходимо поддерживать на желаемом уровне. В зависимости от текущего положения ротора и приложенной к статору ЭДС на обмотке ротора индуцируется ЭДС.Эту ЭДС можно измерить и использовать для приведения в действие двигателя, чтобы скорректировать положение нагрузки.
Передаточная функция синхронизатора и его конструкция, рабочая
Передаточная функция синхронизаторов:
Термин «синхронизация» — это общее название семейства индуктивных устройств, которые работают по принципу вращающегося трансформатора (асинхронный двигатель). Торговые наименования синхронизаторов — Selsyn, Autosyn и Telesyn. По сути, это электромеханические устройства или электромагнитные преобразователи, которые создают выходное напряжение в зависимости от углового положения ротора.Здесь мы познакомимся с функцией передачи t Synchros .
Синхронная система образуется путем соединения устройств, называемых синхронизирующим передатчиком и трансформатором управления синхронизацией . Их еще называют синхронными парами. Пара synchro измеряет и сравнивает два угловых смещения, и ее выходное напряжение приблизительно линейно с угловой разностью осей обоих валов. Их можно использовать двумя способами:
1.Контролировать угловое положение груза с удаленного / большого расстояния.
2. Для автоматической коррекции изменений из-за нарушения углового положения груза.
Обязательно к прочтению:
Конструкция синхронного передатчика:
Конструктивные элементы , электрическая схема и схематическое обозначение синхронизирующего передатчика показаны на рисунке ниже. Две основные части синхронизирующего передатчика — это статор и ротор.Статор идентичен статору трехфазного генератора.
Он изготовлен из многослойной кремнистой стали и имеет паз на внутренней периферии для размещения сбалансированной трехфазной обмотки. Обмотка статора концентрическая, оси трех катушек разнесены на 120 °. Обмотка статора соединена звездой (Y-соединение). Эта базовая конструкция поможет вам получить передаточную функцию Synchros .
Ротор представляет собой гантель с одной обмоткой.Концы обмотки ротора оканчиваются двумя контактными кольцами. Однофазное переменное напряжение возбуждения подается на ротор через контактные кольца.
Принцип работы синхронного передатчика:
Когда ротор возбуждается переменным напряжением, в роторе течет ток и создается магнитное поле. Магнитное поле ротора индуцирует ЭДС в катушках статора за счет действия трансформатора. Эффективное напряжение, индуцированное в любой катушке статора, зависит от углового положения оси катушки по отношению к оси ротора.
Пусть,
er = Мгновенное значение переменного напряжения, приложенного к ротору.
es1, es2, es3 = Мгновенное значение ЭДС, индуцированной в обмотках статора S1, S2, S3 относительно нейтрали соответственно.
Er = максимальное значение напряжения возбуждения ротора.
ω = Угловая частота напряжения возбуждения ротора.
Kt = соотношение оборотов обмоток статора и ротора.
Kc = коэффициент связи.
θ = Угловое смещение ротора относительно опорного.
Пусть, мгновенное значение напряжения возбуждения ротора, er = Er sin ωt
Пусть ротор вращается против часовой стрелки. Когда ротор вращается на угол, в обмотках статора индуцируются θ-ЭДС. Частота наведенной ЭДС такая же, как частота ротора. Величина наведенных ЭДС пропорциональна соотношению витков и коэффициенту связи.Передаточное число Kt является постоянным, но коэффициент связи K является функцией углового положения ротора.
Наведенная ЭДС в обмотке статора = Kt Kc Er sin ωt
Пусть es2 будет опорным вектором. Со ссылкой на приведенный выше рисунок, когда θ = 0, магнитная связь катушки S2 максимальна, а когда θ = 90 °, магнитная связь катушки S2 равна нулю. Следовательно, потокосцепление катушки S2 является функцией cosθ (т.е. kc = Kt cosθ для катушки S2). Магнитосцепление катушки s3 будет максимальным после поворота на 120 ° против часовой стрелки, а поток S1 — после поворота на 240 °.
Коэффициент связи, Kc для S2 = K1 cos θ
Коэффициент связи, Kc для S3 = K1 cos (θ-120 °)
Коэффициент связи, Kc для S1 = K1 cos (θ-240 °)
Следовательно, ЭДС обмоток статора относительно нейтрали можно выразить следующим образом.
es2 = Kt K1 cos θ Er sin ωt = K Er cos θ sin ωt
es3 = Kt K1 cos (θ-120 °) Er sin ωt = K Er cos (θ-120 °) sin ωt
es1 = Kt K1 cos (θ-240 °) Er sin ωt = K Er cos (θ-240 °) sin ωt
Со ссылкой на рисунок ниже, согласно закону напряжения Кирхгофа, ЭДС катушка-катушка может быть выражена как
eS1S2 = eS1 — eS2 = √3 KEr sin (θ + 240 °) sin ωt
eS2s3 = eS2 — es3 = √3 KEr sin (θ + 120 °) sin ωt
eS3s1 = eS3 — es1 = √3 KEr sin θ sin ωt
Обязательно к прочтению:
Когда θ = 0, из приведенного выше уравнения можно сказать, что максимальная ЭДС индуцируется в катушке S2.Но из приведенного выше уравнения видно, что напряжение между катушкой es3s1 равно нулю. Это положение ротора определяется как электрический ноль передатчика.
Положение электрического нуля используется в качестве эталона для определения углового положения ротора. Входом для синхронизирующего передатчика является угловое положение его вала ротора, а на выходе — набор из трех напряжений между катушкой статора, измеряя и идентифицируя набор напряжений на клеммах статора.
Можно определить угловое положение ротора [доступно устройство, называемое синхронно-цифровым преобразователем, для измерения напряжений статора и вычисления угловой меры, а затем отображения направления и угла поворота ротора].
Конструкция трансфромера с синхронным управлением:
Конструкция преобразователя синхронизации аналогична конструкции преобразователя синхронизации , за исключением формы ротора.Ротор управляющего трансформатора выполнен цилиндрическим, так что воздушный зазор практически однороден. Эта особенность управляющего трансформатора сводит к минимуму изменения импеданса ротора при вращении вала. Конструктивные особенности, электрическая схема и схематическое обозначение управления. трансформатор показан на рисунке ниже.
Работа трансфромера с синхронным управлением:
Генерируемая ЭДС синхронизирующего передатчика подается в качестве входного сигнала на обмотки статора управляющего трансформатора.Вал ротора соединен с нагрузкой, положение которой должно поддерживаться на заданном значении. В зависимости от текущего положения ротора и приложенной к статору ЭДС на обмотке ротора индуцируется ЭДС, которую можно измерить и измерить. используется для привода двигателя, чтобы исправить положение нагрузки.
Синхронизация как детектор ошибок:
Детектор ошибки синхронизации образован путем соединения синхронизирующего передатчика и трансформатора управления синхронизацией .В этой схеме выводы статора передатчика напрямую соединены с выводами статора управляющего трансформатора. Угловое положение передатчика-ротора является опорным входом (или входом, соответствующим желаемому выходу), а ротор возбуждается Источник переменного тока с частотой, ω.
Ротор управляющего трансформатора соединен с серводвигателем и валом нагрузки, положение которого является желаемой выходной мощностью. Индуцированная ЭДС (напряжение ошибки) на контактных кольцах ротора управляющего трансформатора измеряется схемой формирования сигнала.Выход схемы преобразования сигнала используется для привода двигателя, чтобы было достигнуто желаемое положение нагрузки. Простая схематическая диаграмма синхронизаторов как детектора ошибок показана на рисунке ниже.
Первоначально предполагается, что валы передатчика и управляющего трансформатора выровнены. В этом положении ротор передатчика будет в электрическом нулевом положении, а ротор управляющего трансформатора будет в нулевом положении, а угловое разделение обеих осей ротора выровнено. положение — 90 °.Нулевое положение управляющего трансформатора в сервосистеме определяется как положение его ротора, при котором выходное напряжение на обмотке ротора равно нулю, а датчик находится в его электрическом нулевом положении.
Когда ротор передатчика возбужден, создается магнитный поток ротора, и в катушках статора индуцируются ЭДС. Эти наведенные ЭДС воздействуют на катушки статора управляющего трансформатора. Токи в катушках статора создают магнитный поток в управляющем трансформаторе. Из-за сходства в магнитной конструкции диаграммы потока, создаваемые в двух синхросигналах , будут одинаковыми, если не учитывать все потери.Диаграммы потоков показаны на рисунке ниже.
Пусть ротор передатчика вращается на угол θ от своего электрического нулевого положения. Теперь ротор управляющего трансформатора будет вращаться в том же направлении на угол α от своего нулевого положения. Чистое угловое разделение двух роторов равно (90-θ + α), а напряжение, индуцированное в роторе управляющего трансформатора, равно пропорциональна косинусу этого угла.
Напряжение ошибки усиливается и используется для управления серводвигателем.Двигатель приводит в движение вал трансформатора управления синхронизацией , пока он не достигнет нового выровненного положения, в котором напряжение ошибки равно нулю.
Обязательно к прочтению:
Передаточная функция синхронизаторов:
Напряжение на контактных кольцах управляющего трансформатора (модулированное напряжение ошибки)
em = K ‘Er cos (90 — θ + α) sin ωt
= K ‘Er cos (90 — (θ — α)) sin ωt
= K ‘Er sin (θ — α) sin ωt
где K ‘- пропорциональная постоянная
Пусть φ (t) = θ — α
Для малых значений φ (t) sin (θ — α) = sin φ (t) ≈ φ (t)
em = K ‘Er φ (t) sin ωt
Из приведенного выше уравнения можно сказать, что выходное напряжение детектора ошибки синхронизации представляет собой модулированный сигнал с несущей частотой ω (которая совпадает с частотой питания ротора передатчика).
Величина модулированной несущей волны пропорциональна φ (t), а изменение фаз модулированной волны зависит от знака φ (t). Схема преобразования сигнала демодулирует напряжение, доступное на контактных кольцах, и вырабатывает демодулированную и усиленную ошибку. напряжение для привода двигателя.
Напряжение демодулированной ошибки, e = Ks φ (t)
где K = Чувствительность детектора ошибок синхронизации в Вольтах / град.
Взяв преобразование Лапласа из приведенного выше уравнения, мы получим
E (s) = Ks φ (s)
∴ E (s) / φ (s) = Ks
Вышеприведенное уравнение представляет собой передаточную функцию детектора ошибок Synchro .
Заключение:
В этом посте мы узнали о передаточной функции , конструкции и , Принцип работы Из передатчик Synchros . Вы можете скачать эту статью в формате pdf, ppt.
Комментарий ниже, если у вас есть какие-либо вопросы!
(PDF) Принцип преобразования и метод управления синхросигналом
Содержимое этой работы может использоваться в соответствии с условиями Creative Commons Attribution 3.0 лицензия. Любое дальнейшее распространение
этой работы должно содержать указание на автора (авторов) и название работы, цитирование журнала и DOI.
Опубликовано по лицензии IOP Publishing Ltd
ISAI 2020
Journal of Physics: Conference Series 1575 (2020) 012006
IOP Publishing
doi: 10.1088 / 1742-6596 / 1575/1/012006
1
1
1
1
Принцип преобразования и метод управления синхросигналом
Wenfa Lv
Научно-исследовательский институт автоматизации Цзянсу, Shenghu Road NO.18, город Ляньюньган,
Провинция Цзянсу, 222006, Китай
Электронная почта: lwf_2001@126.com
Реферат. Synchro — это разновидность микромотора, используемого для измерения угла. Он может выводить
аналоговых сигналов, содержащих угловую информацию, которая широко используется в системе управления огнем. В
, чтобы облегчить обработку, необходимо оцифровать эти аналоговые сигналы. В этой статье
8255A используется в качестве основного управляющего чипа, а высокоскоростные высокоточные цифро-аналоговые преобразователи
и аналого-цифровые преобразователи используются для аналогового сбора данных в реальном времени или математического преобразования сигналов сельсина в реализовать обмен данными в реальном времени между оборудованием управления огнем
и внешним оборудованием, и сигналы сельсина используются для передачи данных в реальном времени
, технология имеет характеристики гибкого управления, простой схемы,
сильного реального времени, высокого Надежность, и она широко использовалась в системе управления огнем морской пушки
, и достигла хороших результатов
1.Введение
В системе управления огнем оборудование управления огнем должно собирать информацию об ориентации навигационного оборудования
, такую как скорость и курс, а также положение артиллерии. Это оборудование
обычно размещается в разных каютах на разных палубах, на большом расстоянии друг от друга и в сложной электромагнитной среде
в кабине. Чтобы обеспечить надежную передачу этих сигналов
, эти сигналы, как правило, являются сигналами самовыпрямления переменного напряжения возбуждения.Для того чтобы упростить компьютерную обработку данных
, эти высокочастотные аналоговые сигналы переменного тока необходимо преобразовать в цифровую форму. Предложен принцип управления и способ реализации аппаратуры управления артиллерийским огнем на приемник
аналоговых сигналов внешнего устройства самовыпрямителя. В этом методе
используются микроконтроллер 8255A,
в сочетании с аналого-цифровым преобразователем SDC и цифро-аналоговым преобразователем DSC. Он широко используется в корабельных системах управления огнем благодаря низкой стоимости, высокой производительности в реальном времени
, высокой надежности и простоте обслуживания.
2. Принцип преобразования
2.1. Преобразователь SDC и принцип преобразования
Принцип преобразования состоит в том, что трехфазное напряжение в двухфазное напряжение V1, V2 подается путем подачи трехфазного напряжения
на миниатюрный трансформатор. D1, D2, D3 сигналов автоматического выпрямителя являются входными, угол вала
составляет
.
V1 определяется
V1 = KEsin
(1)
V2 задается
V2
=
KEcos
(2) Индуктивное давление
(2) Сельсин
Индуктивный датчик давления:
Индуктивный преобразователь давления — простая конструкция, в которой изменение индуктивности чувствительного элемента вызывается изменением давления, показана на рис.13.22.
Здесь давление, действующее на подвижный магнитный сердечник, вызывает увеличение индуктивности катушки, соответствующее действующему давлению. Изменение индуктивности снова может производиться на основе электрического сигнала с помощью моста переменного тока.
Преимущество датчика давления индуктивного типа перед резистивным типом состоит в том, что отсутствуют подвижные контакты, что обеспечивает непрерывное разрешение изменения без дополнительной фрикционной нагрузки на измерительную систему.
В немного измененной форме этот принцип используется для получения изменения взаимной индуктивности между магнитно связанными катушками, а не самоиндукции отдельной катушки. Когда происходит изменение наведенного напряжения, преобразователь иногда называют датчиком переменного магнитного сопротивления или магнитным датчиком. Очень важный пример взаимного типа — LVDT.
Synchro’s — это общее название факультета индуктивных датчиков давления, которые могут быть подключены различными способами для измерения угла вала.Все эти устройства работают по существу по одному и тому же принципу — вращающемуся трансформатору. Synchro выглядит как двигатель переменного тока, состоящий из ротора и статора.
Synchro обычно используются в системе управления, но обладают свойствами, которые также можно использовать в измерительных приборах.
Synchro может быть датчиком углового положения, работающим по принципу индуктивного датчика давления, в котором регулируемое соединение между первичной и вторичной обмотками достигается путем изменения относительной ориентации обмоток.
Внутри большинство синхронизаторов похожи по конструкции. У них есть ротор с одной или тремя обмотками, способный вращаться внутри неподвижного статора. Есть два распространенных типа роторов: явнополюсный и намотанный.
Первичная обмотка — это однофазная обмотка, намотанная на ротор из пластин. Подключение к обмоткам ротора осуществляется через прецизионные контактные кольца, показанные на рис. 13.23.
Статор имеет 3-х фазную обмотку со смещением обмоток 3-х фаз на 120 °.Синхронизатор можно рассматривать как переменный трансформатор связи. Синхросигнал также называется Сельсин.
Ротор приводится в действие переменным напряжением, и связь между обмотками ротора и статора изменяется в тригонометрической или линейной зависимости от положения ротора.
Система
Synchro состоит из двух или более взаимосвязанных синхронизаторов. Они сгруппированы или соединены вместе в зависимости от цели использования.
Синхронная система, образованная соединением устройств, называемых синхронным передатчиком и синхронным управляющим передатчиком, является, пожалуй, наиболее широко используемым детектором ошибок в системе управления с обратной связью.Он измеряет и сравнивает два угловых смещения, а его выходное напряжение приблизительно линейно с угловым смещением.
В стандартном синхронном передатчике (TX) используется ротор с явнополюсным ротором с прорезью втулки. Когда к ротору прикладывается возбуждающее переменное напряжение, результирующий ток создает магнитное поле и за счет действия трансформатора индуцирует напряжения в обмотках статора. Эффективное напряжение, индуцированное в любой катушке статора, зависит от углового положения оси катушки по отношению к оси ротора (когда напряжение катушки известно, индуцированное напряжение при любом угловом смещении может быть определено).
Изначально обмотка S 2 статора передатчика расположена для максимального сцепления с обмоткой ротора, как показано на Рис. 13.24 (a). Предположим, что напряжение равно V, связь между S 1 и S 2 статора и первичной (роторной) обмотки является функцией косинуса. В общем, если ротор возбуждается переменным током частотой 50 Гц, также называемым опорным напряжением, напряжение, индуцированное в любой обмотке статора, будет пропорционально косинусу угла между осью ротора и осью статора.Напряжения, наведенные на любой паре выводов статора (S 1 — S 2 , S I — S 3 или S 2 —S 3 ), будут суммироваться или разниться, в зависимости от фаза напряжения, измеренного на катушках.
Например, если опорное напряжение V sin ωt возбуждает ротор синхронизатора (R 1 — R 2 ), на выводах статора будет напряжение следующей формы:
где θ — угол вала.
Эти напряжения известны как напряжения в формате Synchro.
Таким образом, эффективные напряжения в этих обмотках пропорциональны cos 60 ° или равны В / 2 каждая. Пока роторы передатчика и приемника остаются в этом положении, ток не будет течь между обмотками статора из-за баланса напряжений.
Когда ротор передатчика перемещается в новое положение, баланс напряжений нарушается или изменяется. Предполагая, что ротор передатчика повернут на 30 °, как показано на рис.13.24 (b), напряжения обмотки статора преобразователя будут изменены на 0, √3 / 2 В и √3 / 2 В соответственно.
Следовательно, возникает дисбаланс напряжений между обмотками статора передатчика и приемника. Этот дисбаланс напряжения между обмотками заставляет ток течь между обмотками, создавая крутящий момент, который стремится повернуть ротор приемника в новое положение, где баланс напряжений снова восстанавливается. Этот баланс восстанавливается только в том случае, если приемник поворачивается на тот же угол, что и передатчик, а также направление вращения такое же, как и у передатчика.Следовательно, Synchro может использоваться для определения величины и направления углового смещения.
Синхронизаторы крутящего момента требуются, если необходимо передать информацию об угловом смещении от вала одного синхронизатора на вал другого синхронизатора без использования каких-либо дополнительных усилителей или шестерен.
Синхронизаторы крутящего момента обычно подключаются к ретрансляционной системе, состоящей из датчика крутящего момента и приемника крутящего момента. Эта система повторителей имеет точность до ± 1 ° и используется в системах, в которых требуется выход вращающихся устройств для позиционирования удаленного указателя.
Сегодня большинство этих устройств было заменено преобразователем Syncrho-to-digital, управляющим светодиодным дисплеем для цифрового считывания углового положения.
Сельсин
Synchros, также называемый Selsyn, представляет собой мотороподобные устройства, используемые для формирования системы определения и индикации положения. Его принцип также основан на изменении взаимной связи между обмотками передатчика.
Существует два вида сельсина:
- Тип крутящего момента
- Тип управления
Torque type Selsyn состоит из двух роторов с одной обмоткой и статора с тремя обмотками, расположенными на расстоянии 120 ° друг от друга.Эта секция действует как передатчик. Обмотки статора генератора подключены к другим удаленно расположенным 3-х фазным обмоткам. Эта секция действует как приемник, а также имеет обмотки ротора приемника. Крутящий момент Сельсина показан на рис. 13.25.
Ротор обоих агрегатов возбуждается через контактные кольца источником переменного тока с подходящей частотой.
Если ротор приемника находится в том же относительном положении относительно обмоток статора, что и датчик, соединение индуктивного датчика давления идентично, и ток статора не течет между двумя блоками.
Если ротор передатчика смещен из этого нулевого положения, напряжения, индуцированные в двух статорах, будут разницей, и начнет течь ток. Этот текущий поток создает крутящий момент в приемнике, который заставляет ротор приемника перемещаться в выравнивание с новым положением ротора передатчика, и получается предыдущее нулевое положение. Следовательно, приемник всегда следует угловому движению в соответствии с угловым движением передатчика. Его точность ограничена трением подшипников ствольной коробки и калибровкой циферблата.
Управление синхронизацией
Когда требуется большая мощность или крутящий момент и большая точность, используются синхронизаторы управления.
Эти устройства используются для подачи и обработки сигналов управления сервоусилителем, когда требуется большая мощность и точное угловое смещение большой нагрузки. Управляющие синхронизаторы не рассчитаны на механическую нагрузку.
Управляющий трансформатор (CT) создает выходное напряжение ротора переменного тока, которое пропорционально относительным углам вала между синхронизирующим передатчиком и управляющим трансформатором.Обычно устройства подключаются, как показано на рис. 13.26.
Двумя наиболее распространенными синхронизаторами управления являются управляющий передатчик (CX) и управляющий трансформатор (CT).
Выход CX (передатчик) подается на статор CT (трансформатор). CT — это версия приемника крутящего момента с высоким сопротивлением, ротор которого выровнен под углом 90 ° к ротору передатчика (TR).
В системе управления, когда угол вала CX равен углу вала CT, на выводах ротора R 1 и R 2 CT появится минимальное и нулевое напряжение.Любое отклонение от этого нуля вызовет сигнал в роторе трансформатора тока, фаза которого будет зависеть от того, в каком направлении он перемещается от нуля.
Простая сервосистема с замкнутым контуром, использующая систему управления CX и CT, показана на рис. 13.27.
Когда вал CX повернут на некоторый угол θ, выход S 1 , S 2 и S 3 обеспечивает напряжение в формате синхросигнала, как обсуждалось ранее. Эти напряжения передаются на статоры ТТ S 1 , S 2 , S 3 .Если ТТ не находится под входным углом θ, на выходе обмотки ротора ТТ будет создаваться напряжение. Этот сигнал (ошибка) усиливается, обнаруживается фаза и подается на сервоусилитель, чтобы серводвигатель установил нагрузку и вал ТТ в положение, при котором выходная мощность ротора ТТ минимальна (ноль). Направление, в котором двигатель поворачивается на угол θ, определяется фазой ротора ТТ по отношению к опорному напряжению. Следовательно, имеет место сервопривод.
Поворотный датчик положения
Selsyn — HAWE Северная Америка
Флюидлексикон
#ABCDEFGHIJKLMNOPQRSTUVWZ
Ткань materialsFail safeFail безопасное обнаружение positionFailure rateFast excitationFatigue strengthFault detectionFault codeFault diagnosticsFeed вперед Система controlFeedbackFeedback signalFeedback для непрерывного регулируемого движения valvesFeed circuitFeed heightFeed о наличии cylinderFieldbusFiller filterFilling pressureFilterFilter cartridgeFilter characteristicsFilter classFilter кумулятивного efficiencyFilter грязи loadFilter dispositionFilter efficiencyFilter elementFilter для масла removalFilter в главной conduitFilter installationFilter lifeFilter poresFilter selectionFilter размер Поверхность фильтраТкань фильтраФильтр с байпасным клапаномФильтрацияЭффективность фильтрации в целом Конечное устройство контроля Точное управление потоком ФитингиУстановка с коническим кольцомУстановка с фрикционным кольцомФиксированный поршневой двигательФиксированное программное управлениеФиксированный дроссельФлагПламенистойкие гидравлические жидкостиФланцевое соединениеФильтр на фланцеФланцевое крепление-форсункаСистема финикового цилиндра ttingsПлоские уплотненияФлис-фильтрФлисовый материалФлип-флопГрафик расхода / давленияФункция расхода / сигналаКоэффициент расхода Kv (значение Kv) клапанаКоэффициент расхода αDКлапан регулирования расходаКлапан регулирования расхода, 3-ходовой клапан регулирования расходаСхема расходаПрерывно регулируемые клапаныДелитель расходаДеление потокаПотери силыПоток в зазорахПоток в трубопроводахМонитор расхода Скорость потока, зависящая от скорости потери давленияРасход / характеристика давленияСкорость потока / характеристическая кривая сигнала Усиление скорости потока Асимметрия скорости потока Разделение скорости потока Линейность скорости потока Процедура измерения скорости потока Процедура измерения скорости потока Пульсация скорости потока Диапазон требуемого потока Диапазон насыщения скорости потока Жесткость скорости потока Сопротивление потока Сопротивление потока фильтров Датчик потока с овальным ротором в сборе звукиПереключатель потокаПотоковые клапаны Скорость потока в трубопроводах и клапанахТрение жидкости Датчик уровня жидкости Механика жидкости Стандарты мощности жидкости Энергетические системы с магистральной трубой Технология Промывка системыПромывка силовой агрегат Давление промывкиПромывка насосаПромывочный клапан Тенденция к пенообразованию Последующий регулирующий клапан Последующая ошибка скорости Последующее отслеживание Ошибка последующего отслеживанияПодъемная установка Силовая временная диаграмма Сила: импульс, сигнал: импульс, сигнал: импульс, плотность, сила, обратная связь, усиление, измерение EoForce, коэффициент умножения силы, датчик силы, A Предисловие к онлайн-версии Fluke, v, Oikon + P bis Z «(технический глоссарий O + P» Гидравлическая технология от A до Z «) Эластичность формы Форма импульсов Прямой и обратный ходЧетырехходовой клапанЧетырехпозиционный клапанЧетырехквадрантный режимРабочие условияЧастотный анализЧастотный фильтрПредел частотыЧастотная модуляцияЧастотная характеристикаЧастотная характеристика для заданного входаФункциональный спектрФрикционное движениеФункциональные потериФрикционные условия диаграмма
Компенсация радиального зазораРадиально-поршневые двигателиРадиально-поршневой насосРадиально-поршневой насос с внешними поршнямиПараллельный генераторДиапазон рабочего давленияРапсовое маслоБыстрый ходБыстрый ход контуров Скорость подъема давленияСоотношение площадей поршня αСила реакции на контрольной кромкеРеакционная передачаЛегко биоразлагаемые жидкости Референсная производительность Глушитель Регенеративный контур Регулятор Регулятор Регулятора с фиксированной уставкой Относительное колебание подачи δ Относительная амплитуда сигнала Съемный обратный клапан Давление отпускания Сигнал отпускания Клапан сброса Дистанционное управление Повторная точность (воспроизводимость) Условия повторения ВоспроизводимостьПерепрограммируемое управлениеТребуемая степень фильтрацииПрофиль требованияРезультат измерения емкости резервуараОстаточное остаточное сопротивление NSE pressureResponse sensitivityResponse thresholdResponse время в cylinderResponse valueRest positionRetention rateReturn lineReturn линии filterReturn линии номер pressureReversal errorReversible гидростатическое motorReversing motorReversing pumpReynolds ReRigid лопасти machineRippleRise темп signalRise responseRise timeRodless cylinderRod sealingRoller leverRolling лопастного motorROMRoof-образной sealRotary amplifiersRotary потоком dividerRotary трубы jointRotary pistonRotary TRANSFER jointsRotary valveRotation Servo valveRound уплотнительные кольца Рабочие характеристики Постоянная времени разгона До
D-элемент Демпфированные собственные колебания Демпфированные собственные колебания Коэффициент демпфирования d Демпфирование D Демпфирующее устройство Демпфирование в цепи управления Демпфирующая сеть Демпфирование движения цилиндра Демпфирование клапанов Демпфирующее давление Демпфирующее уплотнениеКоэффициент трения Дарси? клапанПоток подачиДетентДетергент / диспергент минеральные маслаПульсация подачиДифференциальная системаДиафрагма (мембрана) Дифференциальный датчик давления Цилиндр дифференциального давления Дифференциальный датчик давления Дифференциальный датчик давления Дифференциальный датчик давления Дифференциальный датчик давления Дифференциальный датчик давления Дифференциальный датчик давления Дифференциальный датчик давления Дифференциальный датчик давления ryЦифровое управлениеТеория цифрового управленияЦифровое управление с удержанием сигналаЦифровые цилиндры (с несколькими положениями) Шаг цифрового входаЦифровое управление клапанамиЦифровой измеряемый сигналЦифровой сбор измеренных значенийЦифровая процедура измеренияЦифровая измерительная техникаЦифровая системаЦифровая технологияЦифровая обработка сигналовЦифровые сигналыЦифровая системаЦифровая технологияЦифровой клапан с квантованием потока, 2-ходовые клапаны управления потоком с прямым срабатыванием Клапан управления потокомНаправленный клапанНаправленный клапанНаправленный клапан, 3-ходовые клапаныНаправленные клапаны 2-ходовые клапаныГрязепоглощающая способность фильтраГрязеудерживающая способностьГрязеочистительДиск-седельный клапанДискретные контроллерыДискретные Диспергентные маслаДискретные камерные машиныКонтроль смещенияДиапазон смещенияДиапазон смещенияДиапазон смещенияДиапазон смещения эффект Цилиндр двойного действия Ручной насос двойного действия Двойное горловое уплотнениеДвойной насосВремя спада Поток Перетаскивание Давление потокаСкорость потокаДрейфПриводная мощностьДрайверВремя сбросаДвойной контур управленияНасос двойной переменнойДвойной насосDurchflussverteilung (разделение потока) Коэффициент заполненияДинамические характеристики плавно регулируемых клапановДинамическое давлениеПринцип динамического давления для измерения расходаДинамическое уплотнение
TachogeneratorTandem cylinderTankTeach в programmingTechnical cyberneticsTelescopic connectionTelescopic cylinderTemperature компенсации при измерении измерений technologyTemperature driftTemperature в hydraulicsTemperature измерения deviceTemperature rangeTemperature responseTerminalTest benchTest conditionsTest pressureTest signalsThermodynamic measuringThermoplastic elastomersThermoplasticsThickened waterThin фольги elementThin фольги деформации gaugeThreaded вала sealThree камеры valveThree вход controllerThree положение valveThree этап сервопривода valveThresholdThrottleThrottle проверить valveThrottle formsThrottle valveThrottling pointThrough поршень стержень, шток-цилиндр, управление на основе времени, управление рабочим процессом на основе времени, непрерывный сигнал, временные сигналы управления, постоянная времени, дискретное время, элемент таймера, управление временем, допуск на скачкообразную реакцию агрегата, предел максимального давления, усилитель крутящего момента, электрогидравлический, характеристика момента, ограничение момента, измерение момента, измерение крутящего момента, двигатель, крутящий момент, мультипликатор. nОбщая эффективностьОбщее давлениеПередаточный элементПередаточный коэффициентПередаточная функцияФункция переноса системы φСигнал передачиПереходный откликПереходная частьЭффективность передачиМетод передачиДавление передачиПередаточное отношениеСкорость передачиТехнология передачиТрансмиттер (единичный преобразователь) Транспортное движение цилиндраТрибологияСигнал триггера — Двухточечный фильтр — Двухточечный регулятор — Двухпозиционный клапан — Двухпозиционный регулятор потока Квадрантное управлениеДвухступенчатое управлениеДвухступенчатый сервоклапанТипы тренияТипы движения цилиндровТипы крепления цилиндров
Фланец
SAEСхема безопасностиСхемы управления безопасностьюЗадвижка-задвижкаПредохранительБезопасность системыПравила безопасностиРиск безопасностиПредохранительный клапанПробоотборник Блок отбора проб и удержанияСхема управления пробойКонтроллер отбора пробОшибка выборкиУправление обратной связью пробыЧастота отбора пробВремя отбора пробПередаточные элементы для отбора пробОткладочный фильтр-шнекНасос осыпания ) Уплотнительный элемент Уплотняющее трение Уплотнительный зазор Уплотнительный край Уплотнительный поршень Уплотнительный профиль Уплотнительный набор Система уплотнения Утечка уплотнения Предварительная нагрузка уплотнения Уплотнения Износ уплотненияСедельный клапанВторичная регулировка гидростатических трансмиссийВторичные меры (в случае шума) Вторичное давлениеСегментный компенсатор давленияСамоконтроль системСамовсасывающий насосСамостоятельная регулировка датчика положения Регуляторы тензодатчикаСинхронизирующая память регуляторов температуры мера йти во время deviceSensitivity гидравлических устройств dirtSensorSensor для управления фактического valuesSensor systemSensor technologySensor valveSeparate цепи hydraulicSeparation capabilitySeparatorSequence controlSequence из actuatorsSequence diagramSequence из measurementsSequentialSerialSeries-производства cylinderSeries circuitSeries connectionSeries соединения characteristicServo всасывания valveServo actuatorsServo cylinderServo driveServo гидравлического systemServo motorServo pumpServo technologyServo valveSet геометрической displacementSet действующего conditionsSetpointSetpoint generationSetpoint generatorSetpoint processingSet давление pe Точка настройкиУстановка импульсаПроцесс настройкиВремя настройкиВремя настройки давленияВремя настройки T gНагрузка на вал в поршневой машинеСтабильность сдвига гидравлической жидкостиУдарная волнаТвердость берегаКороткоходовой цилиндр Блок отключенияОтключающий клапанКлапан-отсекательСигналСигнал / Формы выходного сигналаГенератор сигнала Формы сигнала elementSignal parameterSignal pathSignal processingSignal processorSignal selectorSignal stateSignal Переключаемый сигнал technologySignal transducerSilencerSiltingSingle действующего контроль cylinderSingle цепь systemSingle для управления с обратной связью controlSingle actuatorSingle краем circuitsSingle или отдельным приводом для станкиОдноцелевых квадранте operationSingle resistorSingle стадии серво valvesSintered металла filterSinus responseSI unitsSix-ходового valveSlave поршня principleSliderSliding frictionSliding gapSliding кольцо sealSlipperSlotted скорости близости switchesSlow двигатель с высоким крутящим моментомМалый диапазон сигналаСглаживание сигналаСоленоидСрабатывание соленоида Растворимость газа в гидравлической жидкостиЗвук в воздухеЗвук в жидкостиЗвуковое давление pИсточники погрешности в измерительных приборахСпециальный цилиндрСпециальный шестеренчатый насосСпециальный импедансСкоростная характеристика гидравлических двигателейСхема управления скоростью Измерение скоростиДиапазон уплотненияКвадратное передаточное отношениеСферический конус цилиндра Напряжение сжатия в уплотнениях Стабилизированные гидравлические масла Анализ устойчивости Критерии стабильности Стабильность гидравлической жидкости Поэтапное регулирование часов Поэтапный насос Поэтапный переключатель двигателяСтандартный цилиндрСтандартное отклонение измерения Давление в режиме ожидания Время пуска Пусковая характеристика Пусковые характеристики гидравлических двигателей Пусковое положение Основная positionStarting torqueStart pressureStartup discontinuityStartup ProcessStart viscosityState controllerState diagramState equationsStatement listStatement listState variableStatic behaviourStatic параметры плавной регулировкой valvesStatic sealStationary flowStationary hydraulicsStationary stateStatus monitorsSteady stateStep управления actionStep Диаграмма controlStep functionStepper motorStepper двигателя управлением пропорционального направленного valveStick slipStiction от sealsStiffness из actuatorsStiffness гидравлического fluidStraight трубы fittingStrain gaugeStress relaxationStretch -загрузка уплотненийСальниковый контурПодсхема Погружной двигательПодсистема управленияВсасывающая характеристикаВасосная фильтрацияВасосная линияВсасывающая линияДавление всасыванияРегулирование давления всасыванияУправление всасывающим дросселемВсасывающий клапанКонтроллер суммированной мощностиСуммарное давлениеПодача блока управленияДавление подачиСостояние подачи гидравлической жидкостиПоверхностное кольцоПоверхностный фильтрПоверхностное отклонениеПоверхность пластинчатый автоматПодмывной пластинчатый насосНабухание герметиковДавление выключенияВключение характеристики соленоидаВремя включенияВключениеПоведение переключения устройствКлючающая способность гидрораспределителейКоммутационные характеристикиЦикл переключенияПереключающий элементМетоды переключения (электрические) Способы переключения для гидравлических насосовКонтроль переключаемой мощности Переключаемое положение переключаемых клапанов Переключаемое положение переключаемых клапанов (гистерезис) Импульсное переключение Символы переключения Время переключения Поворотный двигатель Поворотный винтовой фитингСимволы Синхронизирующий цилиндр Синхронное управлениеСинхронный датчик положенияСистемно-совместимый сигналСистемный заказСистемное давление
Обратное давлениеКлапан обратного давленияЗаднее кольцоШариковый клапанПроход полосыБанковый клапан в сборе (моноблок) БарБарометрическая обратная связьСреднее уплотнение перегородкиBasicBaudСила с изгибом оси БернуллиУравнение БернуллиБета-значение (значение β) ДвоичныеДвоичные символыДвоичный элемент схемыДвоичный кодБинарное управление Выпускной фильтр Выпускной клапан Стравливающий клапан (Hy), выпускной клапан (PN) Блок-схема Положение блокировки Узел штабелирования блокировки Эффект продувки Давление продувки Удар через уплотнения поршня Диаграмма характеристик Диаграмма характеристик (частотные характеристики) Графики связиНижний конец цилиндра Без отскокаТрубка Бурдона Тормозной клапан Точка разветвленияТочка отрываФильтр отрываТрение отталкивания расстояние до направления потока жидкости Встроенная грязь Объемный модуль Давление разрыва Автобусная системаБайпасБайпасное расположениеБайпасная фильтрацияБайпасный клапан
Магнитный filterMain valveMale fittingManual adjustmentManual modeMaterials для обработки данных sealsMeasured signalMeasured valueMeasured variableMeasurement данных processingMeasurement (кондиционирование) Измерение uncertaintyMeasuringMeasuring accuracyMeasuring amplifierMeasuring усилитель с несущей процедуры frequencyMeasuring chainMeasuring converterMeasuring deviceMeasuring errorMeasuring instrumentsMeasuring (системы) Измерение rangeMeasuring дроссельной заслонки (калиброванное отверстие) Измерение turbineMechanical actuationMechanical dampingMechanical feedbackMechanical impedanceMechanical lossesMedium Диапазон давлений Емкость памятиЦепи памятиМеталлические уплотненияМетрический контрольСпособы установки клапанаДвигатель MH (станок с изогнутой осью) МикроэмульсияМикрофильтрМикрогидравликаМинеральные маслаМини-измерительное устройство (для работы в режиме онлайн) Минимальный расход управленияМинимальное поперечное сечение для регулирования расходаМинимальное давлениеМинор контурМодульная система управленияМинутная система управления designModula r проектирование систем управленияМодульная системаМодуляцияМодульМониторингСистемы мониторингаСистемы мониторинга гидравлической жидкостиМоностабильное управление засаживаниемСхема движенияУправление двигателем (замкнутый контур) Управление двигателем (разомкнутый контур) Проскальзывание двигателяЖесткость двигателяМонтажные размеры (схемы расположения отверстий) Монтажная плитаМонтажная стенкаСистема с подвижным змеевикомМногоконтурная система насосМногоконтурная система Функциональный клапан Многоконтурные схемы управления с обратной связью Мультимедийный разъем Многопозиционный контроллер Многоступенчатый гидростатический двигатель Многопозиционный двигатель Многопроходный тест Многонасосный двигатель Двигатель МЗ (машина с наклонной шайбой)
А / Ц converterAbrasion resistanceAbsolute цифровой измерительный systemAbsolute фильтрации ratingAbsolute измерения systemAbsolute pressureAbsolute давление gaugeAbsolute давления transducerAcceleration feedbackAcceleration measurementAccess timeAccumulatorAccumulator, hydraulicAccumulator зарядки расход valveAccumulator тест diagramAccumulator driveAccumulator lossesAccumulator regulationsAccumulator sizeACFTD dustAcoustic расцепления measuresAcoustic impedanceAC solenoidAction методов множественного resistanceActive sensorActual pressureActual valueActuated timeActuating для valvesActuationActuation elementActuatorAdaptationAdaptive controlAdaptive controllerAddition pointAdditiveAdditive (для смазочных материалов) Адрес Адгезионные режимы Адгезионные свойства гидравлических жидкостей Адгезионные соединения труб Регулируемый поршневой насос Регулируемый дроссель Регулировка поршневых машин Время регулировки ДопускВозрастание гидравлических жидкостей Старение уплотнений Воздухоочиститель Fine Test Dust (ACFTD) Расход воздухаAi г в стоимостном выражении oilAlgorithmAlphanumericAlphanumeric codingAlphanumeric displayAlpha из filtersAmplifierAmplifier cardAmplitude marginAmplitude modulationAmplitude plotAmplitude ratioAmplitude responseAnalogueAnalogue computerAnalogue controlAnalogue controllerAnalogue данные acquisitionAnalogue измеряется valuesAnalogue измерения procedureAnalogue измерения положения technologyAnalogue measurementAnalogue signalAnalogue сигнал processingAnalogue technologyAngle encoderAngle measurementAngular угловой частоты ω EAnharmonic oscillationAnnular область А RAnnular шестеренчатого насоса / motorAnti-вращение элемента для cylindersApparent грязеемкостьАрифметический логический блок Среднее арифметическое, среднее ASCIIASICАсинхронное управлениеПерепад атмосферного давленияАвтоматическое переключение цилиндровАвтоматическое управлениеАвтоматическое обнаружение неисправностейАвтоматическое включение шестеренчатые насосы (так называемая компенсация зазора) аксиально-поршневой станок аксиально-поршневой двигатель аксиально-поршневой насос
I-блок (в системах управления) I-контроллер Идентификация системы Клапан холостого хода Потери холостого хода Давление холостого хода IEC Устойчивость к помехам Импеданс Z Импеллер Напорный поток Подавленное давление Импульсное срабатывание клапанов Импульсный дозирующий лубрикатор Импульсный шум Импульсное сопротивление энкодеров Импульсный датчик положения Импульсная система измерения угла ) Повышение точности индексации с делителями потока Индексирование коэффициентов при использовании делителей потока Точность индикации Диапазон индикации Индикатор Непрямое срабатывание Непрямые методы измерения Индивидуальный компенсатор давления Индуктивное давление Индуктивное измерение положения Индуктивные датчики давленияНадувные уплотненияВлияние на время переключения Индуктивные датчики давленияВходной перепад давления Начальный угол наклона начального давления сигнал Входной сигнал Неустойчивость системы управления Мгновенные рабочие условия Инструкция Характеристики впуска Высота всасывания Интегрированная гидростатическая трансмиссия Интегрированная схема (IC) Интегрированная электроника Интегрированная система измерения положенияКонтроллер интерференцииВзаимодействие с прерывистым режимомВнутреннее управление с обратной связьюВнутренний впуск жидкостиВнутренний шестеренчатый насосВнутренняя утечкаВнутренняя безопасность с раздельным управлением 9Внутренняя поддержка давления
Фильтр сверхтонкой очисткиУльтразвуковое измерение положения Сигнал компенсации перехлеста Пониженное давление Нестабильный Разгрузочный клапан Полезный объем Коэффициент полезного действия
EDEEPROM (электронно стираемое программируемое постоянное запоминающее устройство) КПД Эффективность трубыЭластичность жидкостей под давлениемЭластичные материалы Устройства для измерения давления с эластичной трубой (типа Бурдона) Уплотнение из эластомера / пластикового покрытия под напряжениемЭластомерыКонкурентная арматураЭлектро-гидравлическая аналогияЭлектрическое срабатываниеЭлектрическое управление мощностью обработки сигнала электрического сигналаЭлектрическая обратная связь приводЭлектрогидравлическая технология управленияЭлектрогидравлический линейный усилительЭлектрогидравлическая системаЭлектрогидравлические системыЭлектромеханические преобразователи сигналовЭлектроуправлениеЭлектрогидравлический усилитель крутящего моментаЭлектромагнитная совместимостьЭлектромеханическое управление перемещением насосов / моторовЭлектронный фильтрЭлектронное распределение потокаЭлектронная обработка сигналовЭлемент для фильтров давленияГидравлическое преобразование энергии sses в гидравликеЭкономия энергии в гидравликеЭнергосбережение в гидравликеМоторное масло в качестве гидравлической жидкостиEPROMEэквивалентный объемный модульЭквивалентная схемаЭквивалентная постоянная времениЭрозионный износОшибкаОшибкоустойчивый компьютерКлассификация ошибки в измерениях Кривая погрешности измерительных приборовПределы ошибки измерительного прибораПороговое значение ошибкиСигнал ошибкиОшибка в датчике ошибкиПредупреждение Клапаны Внешнее деление мощности Внешняя опора
Управление обратной связью p / QБумажный фильтрПарафиновое базовое маслоПараллельная цепь / подключенные параллельноПараллельное соединениеПараллельная обработкаПараметрыФильтрация частичного потокаЭрозия струи частицРазмер частицыПассивный датчикКонтроллерPDPD elementP elementPeperformance / weight ratioPerformance mapPD elementP elementP elementPerformance / weight ratioPerformance mapPeriod patternPhase-frequency responsePhosespessection valvePhase-act Управляемое поведениеПилотный расходПилотная линияПилотные клапаныПилотная ступень для плавно регулируемых клапановПилотный клапанШтюбник в сбореТрубопровод в сбореПропускная способность трубыПолное сопротивление трубы Индуктивность трубыЗащита трубы от разрываТрубные винтовые соединенияТрубопроводПоршень для быстрого ходаПоршневые машиныПоршневой двигательПоршневой манометр подключение Вставной клапан Вставной клапан, 2-ходовой вставной клапан Вставной клапан, 3-ходовой вставной клапан Вставной усилитель Плунжер Контур поршня для быстрого продвижения Поршень поршня Управление точкойПолиацеталь (POM) Полиамид (PA) Полимерные материалы Политетрафторэтилен (PTFE) Полиуретан (AU, EU ) Порт Поперечное сечение портаЗависимые от положения управляющие сигналыПроцесс блокировки, зависимый от положенияПозиционная / временная диаграмма Диаграмма положенияОшибка положенияОбратная связь по положениюОшибка позиционированияОшибка позиционированияИзмерение положенияИзмерение положения с помощью потенциометраПроцесс измерения положенияДатчики положенияПоложительно-импульсное управлениеПринцип положительного смещенияПостолечение, избыточное отверждениеТочка перегибаХарактеристики мощностиГрафик характеристик мощностиПлотность мощности Контроллер мощности потериПотери мощностиСиловой агрегатСиловая частьРазделение мощностиПередача мощностиПредварительный резервуарПредзаправленный масляный бакПредварительная заправка уплотненийКлапан предварительной заправкиПредварительный фильтрДавление перед нагрузкойКлапан предварительной нагрузкиТочный дроссель рабочая часть (заданная точка разрыва) Предварительный нагреватель Давление Давление-расход (pQ) в насосе Характеристика давления-расхода (p / Q) Клапан ограничения давления Герметичный соленоид Редукционный клапан (клапан регулирования давления) Редукционный клапан, 3-ходовой клапан давления- Редукционный клапан Функция сигнала давления Диаграмма давления / расхода Срабатывание давления Изменение давления Процесс чередования давления в машинах прямого вытеснения Усилитель давления Центрирование давления на направляющих клапанах Камера давления Компенсатор давления Регулирование давления Характеристика регулирования давления Контур управления давлением Контур управления давлением для переменного насоса Перепад давления Падение давления График падения давления для клапанов Обратная связь по давлению Фильтр давления Дросселирование Поток давления Формы Колебания давления Жидкость под давлением Прирост давления на плавно регулируемых клапанах Манометр Переключатель выбора манометра Градиент давления Напор давления Независимое от давления регулирование расхода Индикация давления Ограничение давления Падение давления Потери давления из-за дросселей Процедуры измерения давления Колебания давления Пик давления Диапазон позиционирования давления Колебания, вызванные пульсацией давления Пульсации давления Диапазоны давления в гидравлической технологии Номинальные значения давления Соотношение давлений Клапан перепада давления Регулятор давления (регулятор нулевого хода) Повышение давления Датчик скачка давления Переключение давления Клапаны подачи давления с регулируемым давлением Клапан Волна давления Первичное срабатывание Первичное и вторичное управление Первичное управление Первичное управление шумом Первичное давление Первичный клапан Печатная плата Приоритетный клапан Управление рабочим процессом, зависящее от процесса Глубина обработки Обработка фактических значений (или сигналов) Профиль загрязненияПрограмма Носитель программы (память, носитель) Последовательность выполнения программыПрограммная блок-схемаПрограммная библиотекаПрограммный цикл Программируемый логический контроллер управлениеПрограммированиеЯзыки программированияМетоды программированияСистема программированияПрограммный модульПРОМРаспространение ошибкиПропорциональный усилительПропорциональная технология управленияПропорциональный соленоидПропорциональные клапаныЗащитные фильтрыКонтактный переключательPSIPT1 — КонтроллерPT1 — элементPT2 — КонтроллерPT2 — элементPT1 — элементPT2 — КонтроллерPT2 — элементPT1 — элементPT2 — КонтроллерPT2 — элементИмпульсная кодовая модуляцияИмпульсный датчик подачи для ускоренного хода Насос клапан циркуляции холостого хода Насос с установленными в ряд поршни / рядный поршневой насос
Рассчитано pressureCalculating множественного доступа звук powerCalibrating throttlesCamCAN-BUSCapacitive положения measurementCapillary tubeCarrier смысла с обнаружением столкновений (CSMA / CD) Каскадированный (многоканальный контур) управления systemCascaded controlCavitationCavitation erosionCentralised гидравлического маслом supplyCentralised hydraulicsCentre positionCentrifugal pumpCentring по springsCETOPCharacteristic curveCharacteristic с усредненной hysteresisCharge amplifierCharge pumpCheck valveChipChlorinated hydrocarbonsChopperChurning lossesCircuit diagramCircuit схемаСхема технологииКруглый уплотнительный зазорИндекс циркуляции UПотери циркуляции в гидравлических системахКруговое перемещение машины Давление зажимаКласс точностиУровень чистотыКлиматическое сопротивлениеСигнал блокировкиКонтроль засорения отверстийСистема с закрытым центромЗамкнутая схемаСистема управления положением с замкнутым контуромЗамкнутый контур управленияЗамкнутый контурКонтроль с замкнутым циклом Индекс derCode translatorCodingCoil impedanceCold flowCollapse pressureCollective lineCombined actuationCombined pistonCompact sealComparabilityCompatibility для elastomersCompressibilityCompressibility factorCompression энергии EKCompression setCompression объема ΔVKComputer controlsComputerised числового программного управления (ЧПУ) ConcentratesConditions из comparisonCone valveConfigureConical pistonConstant (фиксированный) throttleConstant расхода соотношения gaugeContact давления systemConstant Контакта насос controlsContact systemConstant сила давления characteristicConstant т pContact sealsContamination classContamination в operationContamination Измерение Загрязнение гидравлической жидкости Непрерывно регулируемый клапан потока Непрерывно регулируемый клапан давления Непрерывно регулируемые клапаны Непрерывные рабочие условия Постоянное давление Непрерывное значение Контроль Алгоритм управления Управляющий усилитель Блок управления (блок клапанов) Карта управления Контрольная характеристика Управляющая команда Управляющий компьютер Концепция управления в жидкости технологияЦилиндр управления Отклонение управленияУстройства управленияСхема управленияРазница управленияГеометрия краев клапанов Управляющая электроникаОборудование управленияОшибка управленияРасход управленияРасход управленияКонтроль в диапазоне мощностей Контролируемая подсистемаКонтроллерКонцепции контроллераКонтроллер для демпфирования (фильтр верхних частот) Входная переменная контроллера y Входная переменная RC-контроллера поток сигнала) Память управленияМотор управленияКолебания управленияПанель управленияПараметры управленияПластина управленияМощность управленияДавление управленияПрограмма управленияДиапазон управленияДиапазон управленияСоленоид управленияПружины управленияСтруктура управленияКонтроль площади поверхностиПереключатель управленияТехнология управленияДроссельная заслонкаБлок управленияПеременная управленияГромкость управления для клапановУправление со сменным ПЗУКонтроль с дроссельной заслонкойХолодильник Корректирующая скорость Корректирующая переменная Корректировка характеристик Стоимость гидроэлектростанции Противоточное охлаждение Покрывающая пластина Ползучая подача (скорость) Медленное движениеПотеря давления, зависящая от поперечного сечения Система с питанием от тока Индикатор тока Фитинг с врезным кольцомЦикл Частота цикла Цилиндр Эффективность цилиндра
Закон Хагена-Пуазейля Половина разомкнутой гидравлической цепи Датчик эффекта холла Расстояние заклинивания dРучной насос Управление с проводкой (VPS) Твердость материалов для уплотненийТепловой баланс в гидравлических системах Жидкости HFB Жидкости под давлением HFC Жидкости HFDИерархическая схема управленияВысокочастотный фильтр (фильтр) Фильтр высокого давленияПропорциональный клапан с высоким крутящим моментом Высокоскоростные двигатели выпускной клапан motorsHigh Water Based Fluids (HWBF) HL oilsHLPD oilsHLP oilsHolding currentHolding elementHole patternsHose assembliesHose lineHosesHose stretchingHumHVLP oilsHybrid accumulatorHydraulic accumulatorHydraulic actuationHydraulic axisHydraulic braking cylinderHydraulic bridge circuitHydraulic bridge rectifierHydraulic capacity C hHydraulic consumerHydraulic cylinderHydraulic damping (of servomotors)Hydraulic drive systemsHydraulic efficiencyHydraulic fluidsHydraulic half bridgesHydraulic inductance L hHydraulic intensifierHydraulic motorHydraulic motors subject to secondary controlHydraulic piloting stageHydraulic p ower packHydraulic power packHydraulic pumpHydraulic resonance frequencyHydraulicsHydraulic sealsHydraulic shockHydraulic signal technologyHydraulic spring constantHydro-mechanical closed loop controlHydro-mechanical signal converterHydro-mechanical systemHydrokineticsHydromechanical efficiencyHydropneumatic accumulatorHydrostatic bearingHydrostatic driveHydrostatic energyHydrostatic lawsHydrostatic machinesHydrostatic power P hHydrostatic reliefHydrostatic resistanceHydrostaticsHydrostatic servo driveHydrostatic traction driveHydrostatic transmissionHydrostatic transmission with separated primary/secondaryHysteresis
O-ring sealOil-in-water emulsionOil coolerOil hydraulicsOil samplingOil separatorOn-off controlOn-stroke time of a pumpOnboard-ElektronikOne-way tripOpen-centre positionOpen-centre pump controlOpen centre systemOpen circuitOpen control circuitOpened control circuitOpening/closing pressure differenceOpening pressureOpen loopOpen loop control systemOpen loop synchronisation controlOperating characteristicsOperating conditionsOperating cycle frequencyOperating defectOperating life of a filterOperating loadsOperating manualOperating mode of a controlOperating modes of drivesOperating parametersOperating pointOperating pressureOperating safetyOperating systemOperating viscosityOperational amplifierOperation pressureOptical fibre technologyOptimising the controllerOrbit motorOrificeOscillationsOscilloscopeOutlet pressureOutput deviceOutput moduleOutput unitOutput volumeOver-excitationOverall control unitOverlap in valvesOverload protectionOverpressureOverrunOvershootOvershoot time 9000 3
Waiting periodWater glycol solutionWater hydraulicsWater in oilWater in oil emulsionWear protection capacityWelded nipple fittingWetting abilityWheel motorWordWord lengthWord processorWorking cycleWorking linesWorking positions
Labyrinth gap sealLabyrinth sealLaminar flowLaminar flow resistorLANLaplace transformationLarge signal rangeLaw of superpositionLeakage, leakLeakage compensationLeakage lineLifetimeLimiting conditionsLimit load controlLimit monitorLimit pick upLimit signalLimit switchLinearLinear control signalLinear control theoryLinearisationLinearityLinearity errorLinear motorLinear regulatorsLine filterLip sealLoad-holding valveLoad collectiveLoad flow Q LLoading models for cylindersLoad pressure compensationLoad pressure differenceLoad pressure feedbackLoad pressure p LLoad sensing systemLoad stiffnessLocking cylindersLogic controlLogic diagramLogic elementLoop gain V KLoop lineLosses in displacement machinesLow-pressure pumpLowering brake valveLow pass filterLow pressure
Naphta based oilNatural angular frequency ω eNatural angular frequency ω oNatural dampingNatural frequencyNatural frequency foNatural frequency of a hydraulic cylinderNBRNeedle-type throttleNegative-pulse controlNeutralisation numberNeutral positionNeutral position of the pumpNewtonian fluidNoiseNoise levelNoise level (A-weighted) L pANoise level additionNoise level L pNoise level L WNoise level WNoise measurementNominal flow rateNominal force of a cylinderNominal mode of operationNominal operating conditionsNominal powerNominal pressureNominal sizeNominal valve sizesNominal viscosityNominal widthNon-contact sealsNon-linear control systemNon-linearityNon-linear signal transmitterNormally closed (NC) valveNormally open valveNormal pressureNozzleNull-adjustment signalNull biasNull bias adjustmentNull driftNull range of a proportional spool valveNull shift stability
Value discreteValveValve-controlled pumpsValve actuationValve assembly systemsValve blockValve block designValve control spoolValve control with four edgesValve dynamicsValve efficiencyValve noisesValve operating characteristicsValve plate-controlled pumpsValve polarityValve pressure differenceValve sealsValve with flat sliderVane pumpVariable area principleVariable delivery flow (control)Variable pumpVariable pump, variable motorVariable throttleVelocity amplificationVelocity controlVelocity errorVelocity feedback control circuitVelocity feedback loopVelocity measurementVelocity of sound pressure wavesVertical column pressure gaugeVertical stacking assemblyVibration fatigue limit of a systemViscosityViscosityViscosity/pressure characteristicViscosity/temperature characteristicViscosity classesViscosity index (VI)Viscosity index correctorViscosity rangeVisual display of contaminationVoltage tolerance for solenoid valvesVolume (bulk) filtersVolumetric efficiencyVolumetric losses 9 0003
5-chamber valve5-way valve
Gap bridgingGap extrusionGap filterGap flowGap sealsGas filling pressureGauge protection valveGeared pump/motorGear pumpGear pump flow meterGerotor motorGraduated glass scaleGrooved ring sealGroup signal line
Kinematical viscosity vKv factor (speed/stroke gain)Kv value (of valves)
Quad-ringQuantisationQuantisation errorQuasistaticQuick connector couplingQuiescent flow
Zero overlap
Jet contractionJet pipe amplifier
.