Обозначения кинематических схем
Обозначения кинематических схем
В данной статье приведены наиболее употребительные условные обозначения элементов кинематических схем металлорежущих станков. Приведены изображения элементов различных кинематических схем и их описание. Условные обозначения элементов утверждены ГОСТ 2.770-68, ГОСТ 2.782-68 и ГОСТ 2.782-68.
Обозначения кинематических схем. Смотреть в увеличенном масштабе
- общее обозначение двигателя без уточнения типа
- общее обозначение электродвигателя
- электродвигатель на лапах
- электродвигатель фланцевый
- электродвигатель встроенный
- вал, ось, стержень, шатун и т. п.
- конец шпинделя для центровых работ
- конец шпинделя для патронных работ
- конец шпинделя для работ с цанговым патроном
- конец шпинделя для сверлильных работ
- конец шпинделя для расточных работ с планшайбой
- конец шпинделя для фрезерных работ
- конец шпинделя для кругло-, плоско- и резьбошлифовальных работ
- ходовой винт для передачи движения
- неразъемная маточная гайка скольжения
- неразъемная маточная гайка с шариками
- разъемная маточная гайка скольжения
- радиальный подшипник без уточнения типа
- радиально-упорный односторонний подшипник без уточнения типа
- радиально-упорный двусторонний подшипник без уточнения типа
- упорный односторонний подшипник без уточнения типа
- упорный двусторонний подшипник без уточнения типа
- радиальный подшипник скольжения
- радиальный самоустанавливающийся подшипник скольжения
- радиально-упорный односторонний подшипник скольжения
- радиально-упорный двусторонний подшипник скольжения
- упорный односторонний подшипник скольжения
- упорный односторонний подшипник скольжения
- упорный двусторонний подшипник скольжения
- упорный двусторонний подшипник скольжения
- радиальный подшипник качения (общее обозначение)
- радиальный роликовый подшипник
- радиальный самоустанавливающийся подшипник качения
- радиально-упорный односторонний подшипник качения
- радиально-упорный односторонний подшипник качения
- радиально-упорный двусторонний подшипник качения
- радиально-упорный двусторонний подшипник качения
- радиально-упорный роликовый односторонний подшипник
- упорный односторонний подшипник качения
- упорный односторонний подшипник качения
- упорный двусторонний подшипник качения
- свободное для вращения соединение детали с валом
- подвижное вдоль оси соединение детали с валом
- соединение детали с валом посредством вытяжной шпонки
- глухое, неподвижное соединение детали с валом
- глухое жесткое соединение двух соосных валов
- глухое соединение валов с предохранением от перегрузки
- эластичное соединение двух соосных валов
- шарнирное соединение валов
- телескопическое соединение валов
- соединение двух валов посредством плавающей муфты
- соединение двух валов посредством зубчатой муфты
- соединение двух валов предохранительной муфтой
- кулачковая односторонняя муфта сцепления
- кулачковая двусторонняя муфта сцепления
- фрикционная муфта сцепления (без уточнения вида и типа)
- фрикционная односторонняя муфта (общее обозначение)
- фрикционная односторонняя электромагнитная муфта
- фрикционная односторонняя гидравлическая или пневматическая муфта (общее обозначение)
- фрикционная двусторонняя муфта (общее обозначение)
- фрикционная двусторонняя электромагнитная муфта
- фрикционная двусторонняя гидравлическая или пневматическая муфта (общее обозначение)
- фрикционная конусная односторонняя муфта
- фрикционная конусная двусторонняя муфта
- фрикционная дисковая односторонняя муфта
- фрикционная дисковая двусторонняя муфта
- фрикционная муфта с колодками
- фрикционная муфта с разжимным кольцом
- самовыключающая односторонняя муфта обгона
- самовыключающая двусторонняя муфта обгона
- самовыключающая центробежная муфта
- тормоз конусный
- тормоз колодочный
- тормоз ленточный
- тормоз дисковый
- тормоз дисковый электромагнитный
- тормоз дисковый гидравлический или пневматический
- шарнирное соединение стержня с неподвижной опорой с движением только в плоскости чертежа
- соединение стержня с опорой шаровым шарниром
- маховик, жестко установленный на валу
- эксцентрик, установленный на конце вала
- конец вала под съемную рукоятку
- рычаг переключения
- рукоятка, закрепленная на конце вала
- маховичок, закрепленный на конце вала
- передвижные упоры
- шарнирное соединение кривошипа
Обозначения кинематических схем. Смотреть в увеличенном масштабе
Смотреть в увеличенном масштабе
- 87а — шарнирное соединение кривошипа постоянного радиуса с шатуном
- 87б — шарнирное соединение кривошипа переменного радиуса с шатуном
- 87в — шарнирное соединение кривошипа постоянного радиуса с шатуном
- 87г — шарнирное соединение кривошипа переменного радиуса с шатуном
- 88а — шарнирное соединение одноколейного вала с шатуном
- 88б — шарнирное соединение многоколенного вала с шатуном
- 88в — коленвал с жестким противовесом
- 88г — коленвал с маятниковым противовесом
- 89а — кривошипно-кулисный механизм с поступательно движущейся кулисой
- 89б — кривошипно-кулисный механизм с вращающейся кулисой
- 89в — кривошипно-кулисный механизм с качающейся кулисой
- 126а — коническая зубчатая передача между пересекающимися валами (общее обозначение без уточнения типа)
- 126б — коническая зубчатая передача соответственно с прямыми, спиральными и круговыми зубьями
- 133а — червячная глобоидная передача
- 133б — червячная передача с цилиндрическим червяком
Пример кинематической схемы токарно-винторезного станка. Смотреть в увеличенном масштабе
Смотреть в увеличенном масштабе
Кучер А. М., Киватицкий М. М., Покровский А. А. Металлорежущие станки (альбом кинематических схем и узлов). Изд-во «Машиностроение», 1972.
Читайте также: Регулирование токарно-винторезного станка 16К20
Полезные ссылки по теме. Дополнительная информация
Кинематические схемы механизмов, условные обозначения.: pavel_samuta — LiveJournal
Объекты вращаются вокруг нас. Все, от теннисного матча до полета космического зонда над планетой Нептун, связано с движением. Когда вы отдыхаете, ваше сердце перемещает кровь по венам. Даже в неодушевленных предметах есть непрерывное движение в колебаниях атомов и молекул. Могут возникнуть интересные вопросы о движении: сколько времени потребуется космическому зонду, чтобы добраться до Марса? Куда приземлится футбольный мяч, если его бросить под определенным углом? Однако понимание движения также является ключом к пониманию других концепций физики. Например, понимание ускорения имеет решающее значение для изучения силы. Некоторые специалисты называют изучение кинематики «геометрией движения».
Некоторые специалисты называют изучение кинематики «геометрией движения».
Для описания движения кинематика изучает траектории точек, линий и других геометрических объектов, а также их дифференциальные свойства (такие как скорость и ускорение). Без кинематической схемы невозможно представить себе какое-либо оборудование. Речь идет об автомобилях, тракторах, станках и более простых типах техники. Вообще кинематика — это раздел классической механики, который направлен на изучение свойств звеньев механизмов. Наука позволяет проводить кинематический анализ, изучая траектории звеньев, определяя точки, положения и скорости элементов. Достижение конечного результата невозможно без обоснования понятия «кинематическая схема», о котором пойдет речь в этой статье.
Кинематические схемы механизмов определяют их конструкцию. Если дать этому определению определение, то это совокупность всех элементов устройства и отношений между ними. Когда на чертежах не требуется показывать конструкцию изделия и отдельных деталей, а достаточно показать лишь принцип работы изделия, передачу движения (кинематику машины или механизма), пользуются схемами. Если кратко ответить на этот вопрос, то кинематическая схема — это некий чертеж или, так сказать, документ, на котором изображены все механические звенья с указанием размеров. Наличие размеров необходимо для кинематического анализа, изучающего основы движения механизмов, их траектории и скорости.
Если кратко ответить на этот вопрос, то кинематическая схема — это некий чертеж или, так сказать, документ, на котором изображены все механические звенья с указанием размеров. Наличие размеров необходимо для кинематического анализа, изучающего основы движения механизмов, их траектории и скорости.
ТММ – это наука, изучающая структуру, кинематику и динамику механизмов и машин при их анализе и синтезе.
Схема, как и чертеж, — графическое изображение. Разница заключается в том, что на схемах детали изображаются с помощью условных графических обозначений. Эти обозначения представляют собой значительно упрощенные изображения, напоминающие детали лишь в общих чертах. Кроме того, на схемах изображаются не все детали, из которых состоит изделие. Показывают лишь те элементы, которые участвуют в передаче движения жидкости, газа и т. п. Элемент кинематической пары или звена — это система поверхностей и линий, по которым одно звено контактирует с другим. Эта точка также называется узлом соединения.
Очень часто звенья цепи называют кинематическими парами. Если мы определяем научный язык, то это сопряженные твердые элементы в количестве не менее двух штук, которые в силу условий соединения ограничивают движение друг друга. Кинематическая схема применяется абсолютно во всех областях промышленности — машиностроении, станкостроении и др. Все правила выполнения регламентированы специальным документом — ГОСТ 2.770—68, наиболее часто встречающиеся из них приведены в таблице.
Как видно из таблицы, вал, ось, стержень, шатун обозначаются сплошной утолщенной прямой линией. Винт, передающий движение, обозначается волнистой линией. Зубчатые колеса обозначают окружностью, проведенной штрихпунктирной линией на одной проекции, и в виде прямоугольника, обведенного сплошной линией, на другой . При этом, как и в некоторых других случаях (передача цепью, передачи реечные, муфты фрикционные и др.), применяются общие обозначения (без уточнения типа) и частные обозначения (с указанием типа). На общем обозначении, например, тип зубьев зубчатых колес не показывают вовсе , а на частных обозначениях показывают тонкими линиями. Пружины сжатия и растяжения обозначаются зигзагообразной линией.
На общем обозначении, например, тип зубьев зубчатых колес не показывают вовсе , а на частных обозначениях показывают тонкими линиями. Пружины сжатия и растяжения обозначаются зигзагообразной линией.
Условные обозначения на кинематических схемах
Условные обозначения на кинематических схемах (продолжение)
- общее обозначение двигателя без уточнения типа
- общее обозначение электродвигателя
- электродвигатель на лапах
- электродвигатель фланцевый
- электродвигатель встроенный
- вал, ось, стержень, шатун и т. п.
- конец шпинделя для центровых работ
- конец шпинделя для патронных работ
- конец шпинделя для работ с цанговым патроном
- конец шпинделя для сверлильных работ
- конец шпинделя для расточных работ с планшайбой
- конец шпинделя для фрезерных работ
- конец шпинделя для кругло-, плоско- и резьбошлифовальных работ
- ходовой винт для передачи движения
- неразъемная маточная гайка скольжения
- неразъемная маточная гайка с шариками
- разъемная маточная гайка скольжения
- радиальный подшипник без уточнения типа
- радиально-упорный односторонний подшипник без уточнения типа
- радиально-упорный двусторонний подшипник без уточнения типа
- упорный односторонний подшипник без уточнения типа
- упорный двусторонний подшипник без уточнения типа
- радиальный подшипник скольжения
- радиальный самоустанавливающийся подшипник скольжения
- радиально-упорный односторонний подшипник скольжения
- радиально-упорный двусторонний подшипник скольжения
- упорный односторонний подшипник скольжения
- упорный односторонний подшипник скольжения
- упорный двусторонний подшипник скольжения
- упорный двусторонний подшипник скольжения
- радиальный подшипник качения (общее обозначение)
- радиальный роликовый подшипник
- радиальный самоустанавливающийся подшипник качения
- радиально-упорный односторонний подшипник качения
- радиально-упорный односторонний подшипник качения
- радиально-упорный двусторонний подшипник качения
- радиально-упорный двусторонний подшипник качения
- радиально-упорный роликовый односторонний подшипник
- упорный односторонний подшипник качения
- упорный односторонний подшипник качения
- упорный двусторонний подшипник качения
- свободное для вращения соединение детали с валом
- подвижное вдоль оси соединение детали с валом
- соединение детали с валом посредством вытяжной шпонки
- глухое, неподвижное соединение детали с валом
- глухое жесткое соединение двух соосных валов
- глухое соединение валов с предохранением от перегрузки
- эластичное соединение двух соосных валов
- шарнирное соединение валов
- телескопическое соединение валов
- соединение двух валов посредством плавающей муфты
- соединение двух валов посредством зубчатой муфты
- соединение двух валов предохранительной муфтой
- кулачковая односторонняя муфта сцепления
- кулачковая двусторонняя муфта сцепления
- фрикционная муфта сцепления (без уточнения вида и типа)
- фрикционная односторонняя муфта (общее обозначение)
- фрикционная односторонняя электромагнитная муфта
- фрикционная односторонняя гидравлическая или пневматическая муфта (общее обозначение)
- фрикционная двусторонняя муфта (общее обозначение)
- фрикционная двусторонняя электромагнитная муфта
- фрикционная двусторонняя гидравлическая или пневматическая муфта (общее обозначение)
- фрикционная конусная односторонняя муфта
- фрикционная конусная двусторонняя муфта
- фрикционная дисковая односторонняя муфта
- фрикционная дисковая двусторонняя муфта
- фрикционная муфта с колодками
- фрикционная муфта с разжимным кольцом
- самовыключающая односторонняя муфта обгона
- самовыключающая двусторонняя муфта обгона
- самовыключающая центробежная муфта
- тормоз конусный
- тормоз колодочный
- тормоз ленточный
- тормоз дисковый
- тормоз дисковый электромагнитный
- тормоз дисковый гидравлический или пневматический
- шарнирное соединение стержня с неподвижной опорой с движением только в плоскости чертежа
- соединение стержня с опорой шаровым шарниром
- маховик, жестко установленный на валу
- эксцентрик, установленный на конце вала
- конец вала под съемную рукоятку
- рычаг переключения
- рукоятка, закрепленная на конце вала
- маховичок, закрепленный на конце вала
- передвижные упоры
- шарнирное соединение кривошипа 87а — шарнирное соединение кривошипа постоянного радиуса с шатуном 87б — шарнирное соединение кривошипа переменного радиуса с шатуном 87в — шарнирное соединение кривошипа постоянного радиуса с шатуном 87г — шарнирное соединение кривошипа переменного радиуса с шатуном
- шарнирное соединение вала 88а — шарнирное соединение одноколейного вала с шатуном 88б — шарнирное соединение многоколенного вала с шатуном 88в — коленвал с жестким противовесом88г — коленвал с маятниковым противовесом
- кривошипно-кулисный механизм 89а — кривошипно-кулисный механизм с поступательно движущейся кулисой 89б — кривошипно-кулисный механизм с вращающейся кулисой 89в — кривошипно-кулисный механизм с качающейся кулисой
- односторонний храповой зубчатый механизм с наружным зацеплением
- двусторонний храповой зубчатый механизм с наружным зацеплением
- односторонний храповой зубчатый механизм с внутренним зацеплением
- мальтийский механизм с радиальным расположением пазов с наружным зацеплением
- мальтийский механизм с радиальным расположением пазов с внутренним зацеплением
- фрикционная передача с цилиндрическими роликами наружного зацепления (контакта)
- фрикционная передача с цилиндрическими роликами внутреннего зацепления (контакта)
- фрикционная передача с коническими роликами наружного зацепления
- регулируемая фрикционная передача с коническими роликами внутреннего зацепления
- регулируемая фрикционная передача с коническими шкивами и промежуточным кольцом
- регулируемая фрикционная передача с подвижными коническими шкивами и клиновым ремнем
- регулируемая фрикционная передача с тороидными шкивами и поворотными сферическими роликами
- регулируемая фрикционная передача с полутороидными шкивами (типа Светозарова)
- регулируемая торцовая фрикционная передача
- регулируемая фрикционная передача со сферическими и коническими роликами
- регулируемая фрикционная передача со сферическими и цилиндрическими роликами
- фрикционная передача с цилиндрическими роликами
- фрикционная передача с гиперболоидными роликами
- шкив ступенчатый, закрепленный на валу
- шкив холостой на валу
- шкив рабочий, закрепленный на валу
- указатели вращения вала соответственно: по часовой стрелке, против часовой стрелки и в обе стороны
- открытая передача плоским ремнем
- открытая передача плоским ремнем с натяжным роликом
- перекрестная передача плоским ремнем
- полуперекрестная передача плоским ремнем
- угловая передача плоским ремнем
- отводка ремня плоскоременной передачи
- передача клиновидными (текстропными) ремнями
- передача круглым ремнем или шнуром
- общее обозначение цепной передачи без уточнения типа
- роликовая цепная передача
- бесшумная (зубчатая) цепная передача
- цилиндрическая зубчатая передача с внешним зацеплением (общее обозначение)
- цилиндрическая зубчатая передача с внешним зацеплением между параллельными валами, соответственно с косыми, прямыми и шевронными зубьями
- цилиндрическая зубчатая передача с внутренним зацеплением между параллельными валами (общее обозначение)
- коническая зубчатая передача 126а — коническая зубчатая передача между пересекающимися валами (общее обозначение без уточнения типа) 126б — коническая зубчатая передача соответственно с прямыми, спиральными и круговыми зубьями
- коническая гипоидная зубчатая передача
- зубчатая реечная передача, соответственно с шевронными, косыми и прямыми зубьями
- общее обозначение зубчатой реечной передачи
- реечная передача с червячной рейкой и червяком
- реечная передача с зубчатой рейкой и червяком
- винтовая зубчатая передача соответственно под прямым или острым углом
- червячная передача 133а — червячная глобоидная передача 133б — червячная передача с цилиндрическим червяком
Условные знаки, применяемые в схемах, вычерчивают, не придерживаясь масштаба изображения.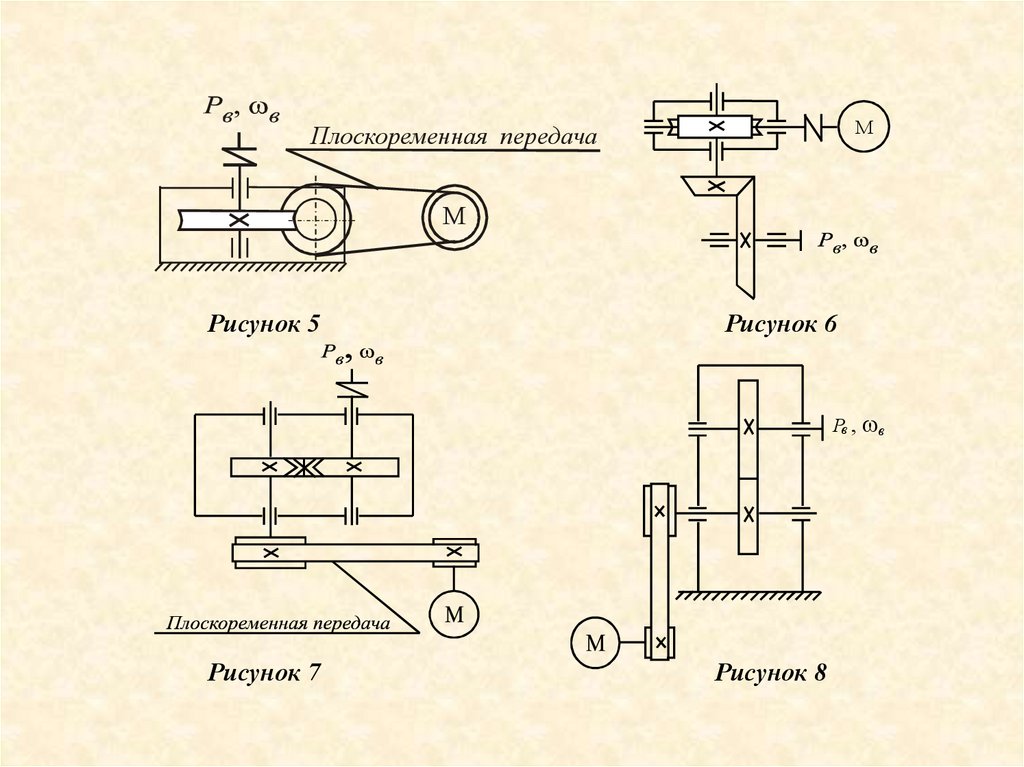 Однако соотношение размеров условных графических обозначений взаимодействующих элементов должно примерно соответствовать действительному соотношению их размеров. При повторении одних и тех же знаков нужно выполнять их одинакового размера. Документ может быть оформлен как на бумажном, так и на электронном носителе. Схемы оформления рекомендуется составлять на одном листе с возможностью разделения его на необходимые форматы при печати.
Однако соотношение размеров условных графических обозначений взаимодействующих элементов должно примерно соответствовать действительному соотношению их размеров. При повторении одних и тех же знаков нужно выполнять их одинакового размера. Документ может быть оформлен как на бумажном, так и на электронном носителе. Схемы оформления рекомендуется составлять на одном листе с возможностью разделения его на необходимые форматы при печати.
При изображении валов, осей, стержней, шатунов и других деталей применяют сплошные линии толщиной s. Подшипники, зубчатые колеса, шкивы, муфты, двигатели обводят линиями примерно в два раза тоньше. Тонкой линией вычерчивают оси, окружности зубчатых колес, шпонки, цепи. Документ предоставляется в виде развертки.
Кинематическая схема
При выполнении кинематических схем делают надписи. Для зубчатых колес указывают модуль и число зубьев. Для шкивов записывают их диаметры и ширину. Мощность электродвигателя и его частоту вращения также указывают надписью типа N = 3,7 кВт, п = 1440 об/мин.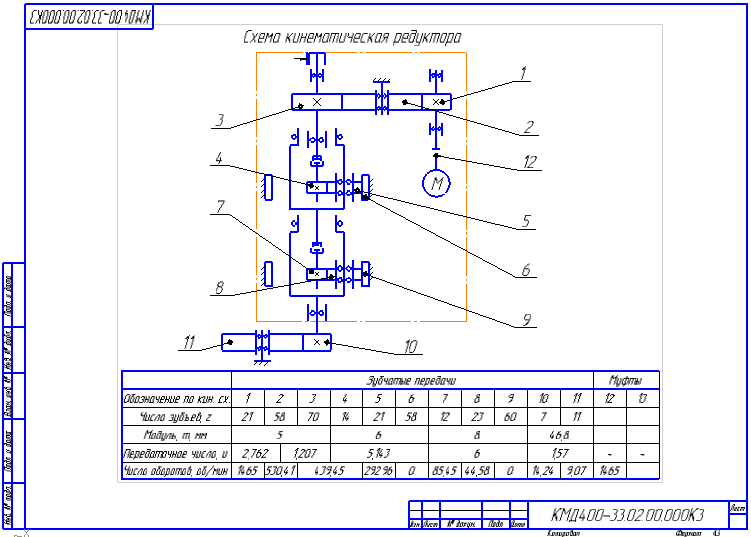
Элементы кинематических схем включают двигатель, который является системой отсчета для всех движущихся компонентов, каждому кинематическому элементу, изображенному на схеме, присваивают порядковый номер, начиная от двигателя. Валы нумеруют римскими цифрами, остальные элементы — арабскими. Важным моментом в этом процессе проектирования является степень свободы системы звеньев и шарниров, которая определяется с помощью критерия Чебычева – Грюблера – Куцбаха. После выполнения этой стадии проектирования Вы видите «скелет» вашего будущего изделия, заложенные в него идеи. В дальнейшем проводите реализацию Ваших идей в виде конструкторской документации и в виде реальных изделий.
Порядковый номер элемента проставляют на полке линии-выноски. Под полкой указывают основные характеристики и параметры кинематического элемента.
Если схема сложная, то для зубчатых колес указывают номер позиции, а к схеме прикладывают спецификацию колес.
В комментариях вы можете задавать вопросы которые вас волнуют, и на данный момент вы не нашли ответ на них. Вам хочется что-то улучшить или есть замечательная идея модернизации, но к сожалению, нет кинематической схемы, я помогу реализовать все смелые идеи.
Вам хочется что-то улучшить или есть замечательная идея модернизации, но к сожалению, нет кинематической схемы, я помогу реализовать все смелые идеи.
Microsoft Word — 5-5-1267.doc
%PDF-1.3
%
1 0 объект
>
эндообъект
2 0 объект
>поток
2016-07-21T12:54:58ZWord2016-07-21T13:55:51+01:002016-07-21T13:55:51+01:00Подключаемый модуль Adobe Mac PDFPDF/X-1:2001PDF/X-1a:2001application /pdf
FalsePDF/X-1:2001PDF/X-1:2001PDF/X-1a:2001uuid:56086bf6-c910-e441-859f-7be530fa547buuid:a99492da-a73e-0049-a807-7bc90532b1d6
 adobe.com/xap/1.0/mm/xmpMMXMP Схема управления мультимедиа
adobe.com/xap/1.0/mm/xmpMMXMP Схема управления мультимедиаконечный поток
эндообъект
188 0 объект
>
эндообъект
5 0 объект
[>]
эндообъект
3 0 объект
>
эндообъект
7 0 объект
>/Шрифт>/ProcSet[/PDF/Text]>>/TrimBox[0. 0 0.0 595,28 841,89]/Тип/Страница>>
0 0.0 595,28 841,89]/Тип/Страница>>
эндообъект
8 0 объект
>/Шрифт>/ProcSet[/PDF/Text/ImageB]/XObject>>>/TrimBox[0,0 0,0 595,28 841,89]/Тип/Страница>>
эндообъект
9 0 объект
>/Шрифт>/ProcSet[/PDF/Text/ImageB]/XObject>>>/TrimBox[0,0 0,0 595,28 841,89]/Тип/Страница>>
эндообъект
10 0 объект
>/Шрифт>/ProcSet[/PDF/Text/ImageB]/XObject>>>/TrimBox[0,0 0,0 595,28 841,89]/Тип/Страница>>
эндообъект
11 0 объект
>/ExtGState>/Font>/ProcSet[/PDF/Text/ImageB/ImageI]/XObject>>>/TrimBox[0.0 0.0 595,28 841,89]/Тип/Страница>>
эндообъект
12 0 объект
>/Шрифт>/ProcSet[/PDF/Text/ImageB]/XObject>>>/TrimBox[0,0 0,0 595,28 841,89]/Тип/Страница>>
эндообъект
194 0 объект
>поток
HWYs8}կ#Ue!A|N&3q.+5R$Xۤb[x
Синтез четырехстержневых механизмов двойного ограничения с применением метода Грублера Научная исследовательская работа по теме «Материаловедение»
(I)
CrossMark
Доступно на сайте www.sciencedirect.com
ScienceDirect
Procedía Engineering 150 (2016) 871 — 877
Procedía Engineering
www.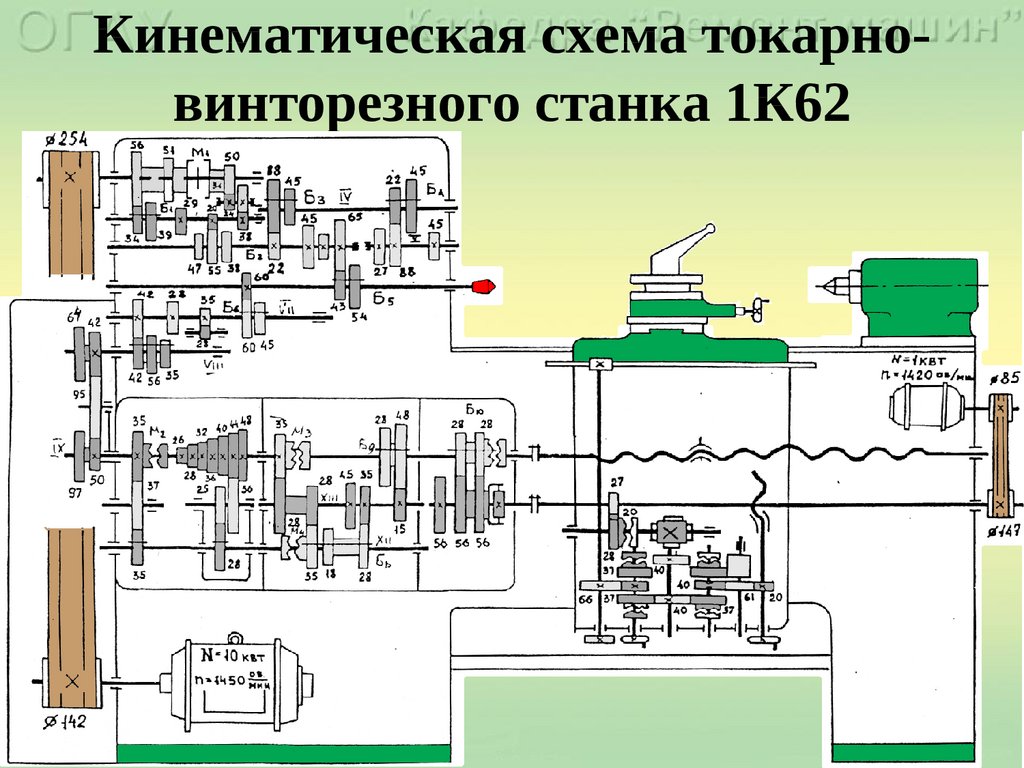 elsevier.com/locate/procedia
elsevier.com/locate/procedia
Международная конференция по промышленному инжинирингу, ICIE Double the Four Constratsis 2016
9 Механизмы с применением метода Грублера
Фомина А.б*, Парамонова М.
Сибирский государственный индустриальный университет, ул. 42, Новокузнецк 654007, Россия **Институт теплофизики СО РАН, пр. Ак. проспект Лаврентьева. 1, Новосибирск 630090, Россия
Реферат
В статье представлены исследования по структурному синтезу кинематических схем пространственных механизмов двойной связи с одной степенью свободы. Исследования проводились с использованием метода Грюблера. Условие Грублера для плоских замкнутых кинематических цепей разработано для пространственных цепей, включающих два общих наложенных ограничения с учетом относительных перемещений и кинематических пар. Путем введения двух вращательных соединений, одной винтовой пары и одного цилиндрического соединения в настоящем исследовании были разработаны два различных варианта пространственных четырехзвенных замкнутых кинематических цепей.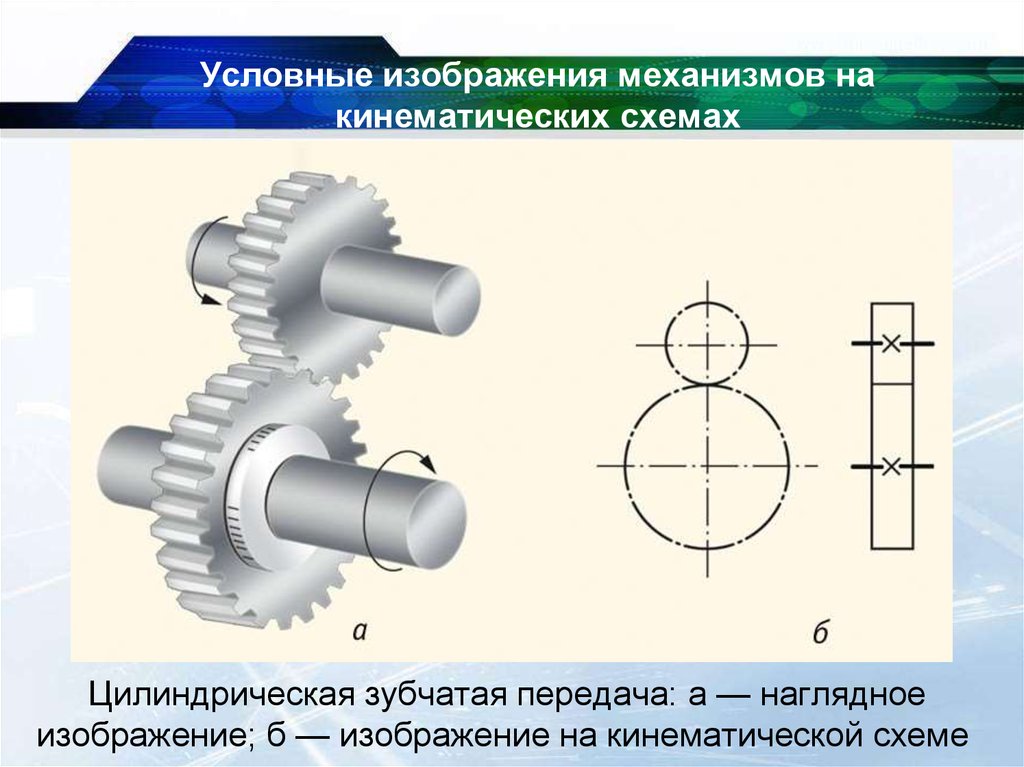 Из этих двух цепей с закреплением одного звена построено шесть кинематических схем неизоморфных одностепенных механизмов. Предлагаемый в статье подход может быть применен для структурного синтеза пространственных механизмов из других семейств в соответствии с используемыми кинематическими парами и количеством накладываемых связей.
Из этих двух цепей с закреплением одного звена построено шесть кинематических схем неизоморфных одностепенных механизмов. Предлагаемый в статье подход может быть применен для структурного синтеза пространственных механизмов из других семейств в соответствии с используемыми кинематическими парами и количеством накладываемых связей.
© 2016 Авторы. Опубликовано ElsevierLtd. Это статья в открытом доступе по лицензии CC BY-NC-ND
(http://creativecommons.Org/licenses/by-nc-nd/4.0/).
Рецензирование под ответственность оргкомитета МКПП 2016
Ключевые слова: механизм; кинематический чай; метод Грублера; кинематическая пара.
1. Введение
В настоящее время существует множество известных методов структурного синтеза механизмов. Среди них метод Ассура [1], позволяющий формировать механизмы из групп Ассура с нулевыми степенями свободы [2,3], метод, основанный на использовании универсальной структурной системы, разработанной Дворниковым Л.Т. [4,5], метод построения механизмов из замкнутых кинематических цепей, разработанный Грублером М. [6,7], ряд других аналитических исследований в области структурных
[6,7], ряд других аналитических исследований в области структурных
* Автор, ответственный за переписку. Тел.: +7-952-171-6434; факс: +7-384-346-5792. Электронный адрес: alexey-nvkz@mail.ru
1877-7058 © 2016 Авторы. Опубликовано Elsevier Ltd. Это статья в открытом доступе по лицензии CC BY-NC-ND
(http://creativecommons.org/licenses/by-nc-nd/4.0/).
Рецензирование под ответственность оргкомитета МКПП 2016
doi:10.1016/j.proeng.2016.07.034
синтез плоскостных и пространственных механизмов [8-19] и с применением вычислительных методов [20-23]. В данной статье предлагается расширение применения метода Грублера для проектирования пространственных механизмов с двумя общими налагаемыми ограничениями [24,25]. Суть метода Грублера заключается в создании замкнутых кинематических цепей с несколькими степенями свободы, в которых одно из звеньев останавливается, а общая степень свободы такой системы становится единой. Для плоских кинематических цепей уравнение Грюблера в нынешних обозначениях имеет вид
3п — 2Р5 = 4 .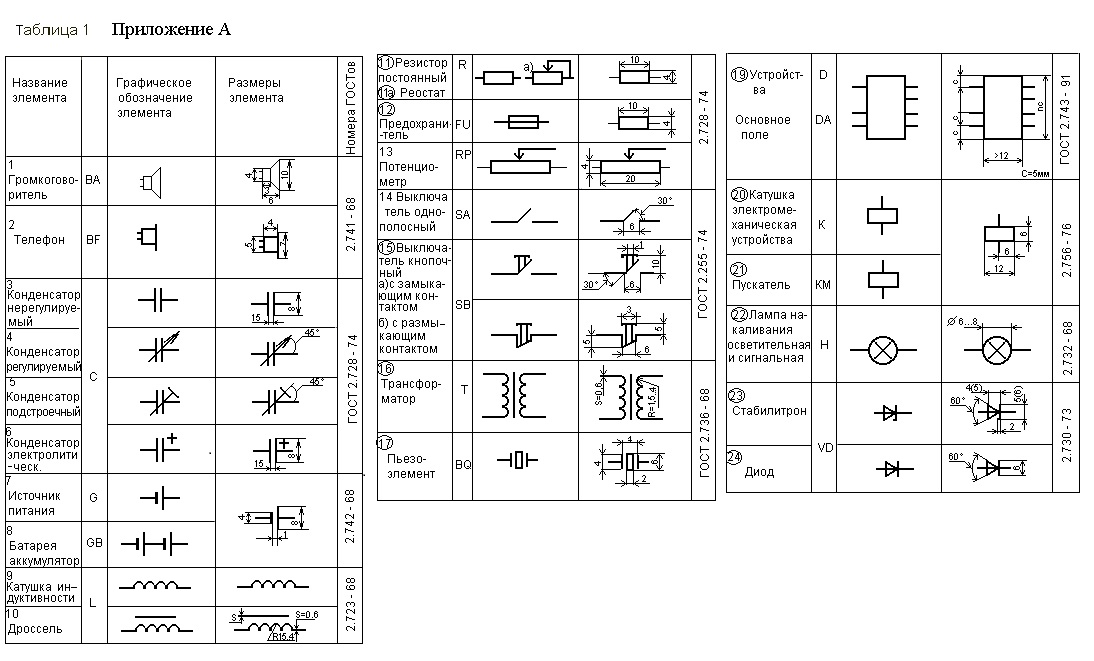
где ng — общее количество звеньев в замкнутой кинематической цепи, p5 — количество одностепенных кинематических пар (шарниров), 4 — подвижность или количество степеней свободы для всей плоской кинематической цепи. Звенья в цепи Грублера могут быть двух-, трех-, четырехпарными и т. д. Это описывается следующей формулой
, где n2, n3, n4 — двух-, трех-, четырехпарные звенья, представленные на рис. 1.
Рис. 1. Двух- (n2), трех- (n3) и четырехпарных (n4) звеньев Грублера.
Связь номеров кинематических пар и номеров различных типов звеньев показывается уравнением 2 р5 = 2«2 + 3«3 + 4«4 +…, (3)
Обратимся к формуле (1) и обсудим ее. Цифра «четыре» в правой части формулы указывает на то, что замкнутая кинематическая цепь имеет четыре относительных движения, из них два поступательных движения относительно перпендикулярных осей, одно вращение вокруг плоскости и одно внутреннее относительное движение. На рис. 2 показана четырехзвенная замкнутая плоская кинематическая цепь ABCD, имеющая эти четыре движения.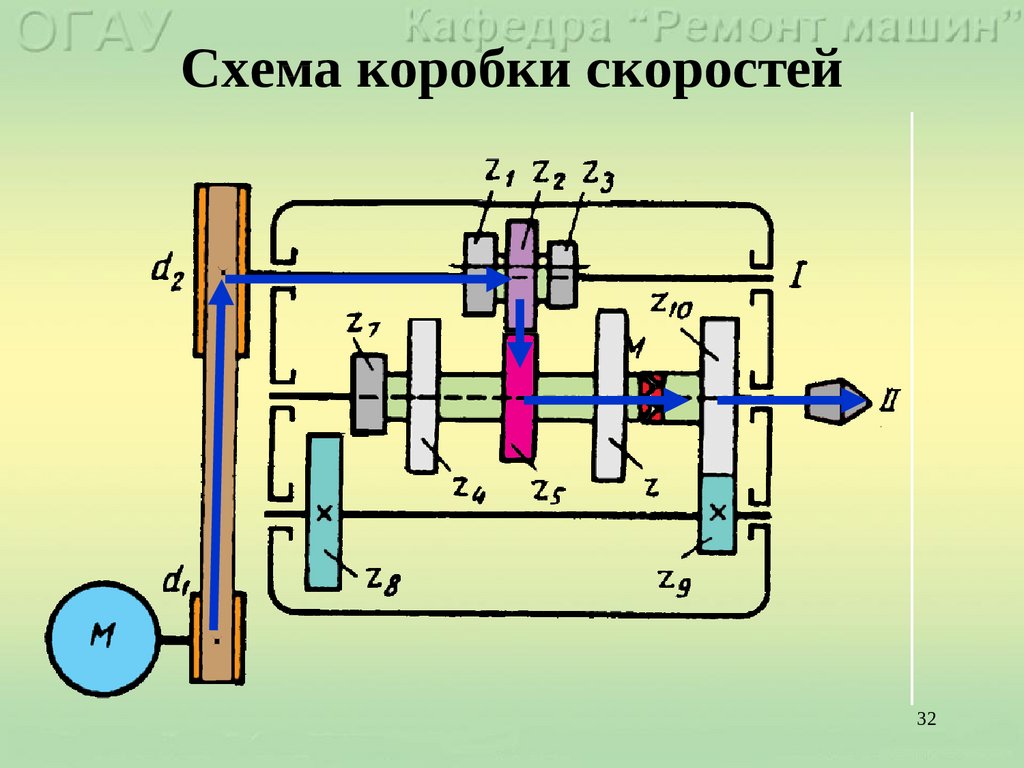
Рис. 2. Плоская замкнутая кинематическая цепь ABCD с двухпарными звеньями n2.
Очевидно, что остановив любое звено в этой цепочке, мы получим механизм с одной степенью свободы относительно фиксированного звена. Например, если мы остановим звено AD, то получим четырехзвенный рычажный механизм с тремя подвижными звеньями AB, BC и CD и четырьмя шарнирами A,
B, C и D. Формулы (1) — (3) позволяют вычислить кинематические параметры для построения любых плоских кинематических цепей, а затем для получения механизма с единственной степенью свободы путем фиксации любого звена цепи.
2. Проектирование четырехзвенных пространственных механизмов с наложенными связями от замкнутых кинематических цепей
2.1. Условие Грублера для пространственных цепей с двумя общими наложенными связями
Формула (1) находит применение при проектировании цепей планарных с тремя общими наложенными связями, когда три движения ограничены и три воспроизводятся в трехмерных координатах.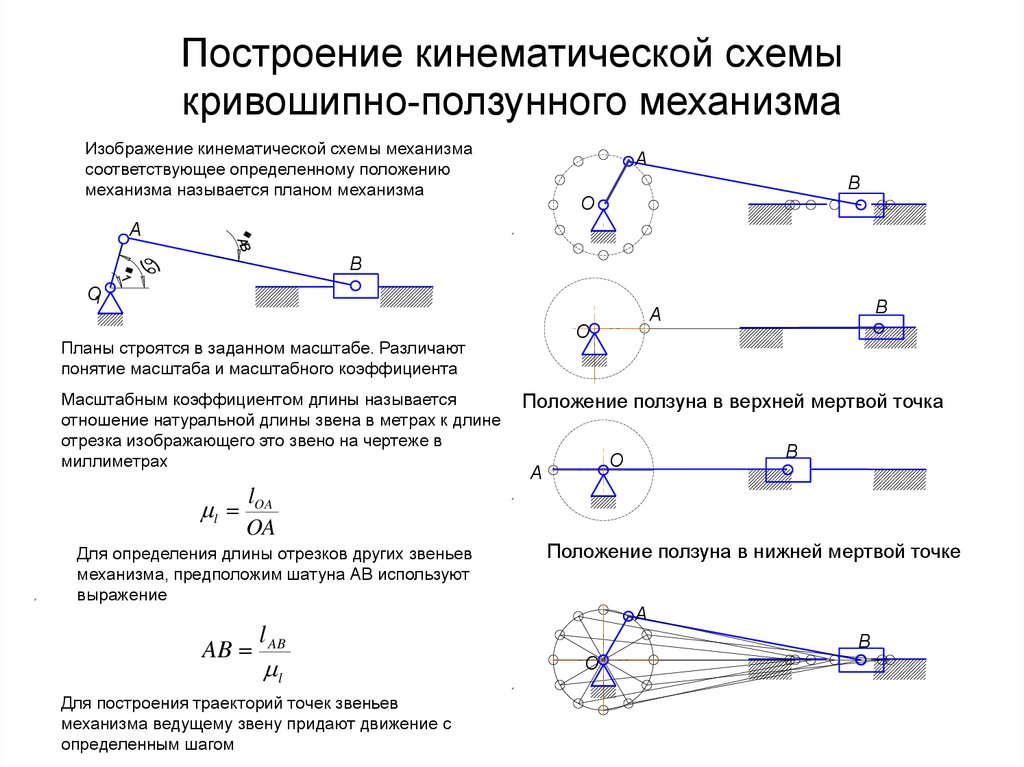 Для четырехзвенной цепи, показанной на рис. 2, наложены ограничения на перемещения Py (перенос вдоль оси y), Rx и Rz (повороты вокруг осей x и z). Итак, эти три ограничения можно обозначить как PRR.
Для четырехзвенной цепи, показанной на рис. 2, наложены ограничения на перемещения Py (перенос вдоль оси y), Rx и Rz (повороты вокруг осей x и z). Итак, эти три ограничения можно обозначить как PRR.
Если мы добавим еще одно (четвертое) движение в трехмерных координатах, мы должны уменьшить одно наложенное ограничение. Таким образом, кинематическая цепь становится пространственной, потому что любое четвертое движение будет стремиться удалить из плоскости хотя бы одно звено. Согласно наложению двух ограничений формула (1) должна быть преобразована к следующему виду
где p5, p4 и p3 — номера одно-, двух- и трехстепенных кинематических пар, 5 — количество степеней свободы в целом кинематическая цепь, включающая четыре степени свободы в трехмерном декартовом пространстве цепи и одну внутреннюю степень свободы. 95=3,_p4=1 и _p3=0. Мы будем использовать два вращательных соединения и одну винтовую пару в качестве кинематических пар с одной степенью свободы (p5) и цилиндрическое соединение в качестве кинематической пары с двумя степенями свободы (p4). На рис. 3 показан первый вариант расположения этих кинематических пар в цепи. На рис. 4 представлена четырехзвенная кинематическая цепь с расположением пар в соответствии со схемой с рис. 3.
На рис. 3 показан первый вариант расположения этих кинематических пар в цепи. На рис. 4 представлена четырехзвенная кинематическая цепь с расположением пар в соответствии со схемой с рис. 3.
4n — 3 p5 — 2 p4 — p3 = 5,
Рис. 3. Положение кинематических пар в цепи RCRS
Рис. 4. Четырехзвенная замкнутая пространственная кинематическая цепь RCRS с двумя общими наложенными связями.
Если мы остановим любое из звеньев этой кинематической цепи, то получим структуру механизма с одной степенью свободы. Все четыре кинематические схемы, которые можно построить из этой цепи, показаны на рис. 5 с фиксированными звеньями AD, AB, CB и CD. Следует отметить, что кинематические схемы с неподвижными звеньями AD и CD изоморфны, обе имеют вращательные и винтовые пары, установленные на неподвижных звеньях, и цилиндрические и вращательные пары на подвижных звеньях в одной и той же последовательности парной градации. Кинематические схемы механизмов с неподвижными звеньями АВ и ВС также изоморфны, так как кинематические пары на неподвижных и подвижных звеньях задаются в одном порядке.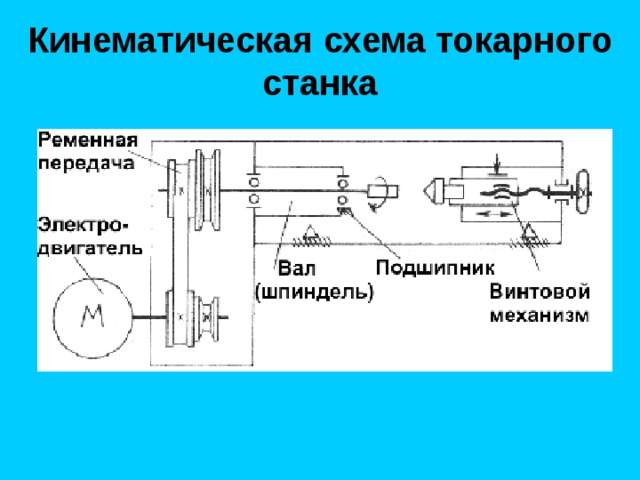
Рис. 5. Четырехзвенные пространственные механизмы с двумя общими наложенными связями, выполненные из замкнутой кинематической цепи РКРС, образуют рис. 4.
2.3. Проектирование механизмов из кинематической цепи КРРС
Другой вариант цепи с двумя вращательными шарнирами, одной цилиндрической и одной винтовой парами схематически показан на рис. 6, а с применением вещественных пар на рис. 7. и другие варианты кинематических цепей с применением этих четырех пар, кроме RCRS (рис. 3) и CRRS (рис. 6).
Чтобы получить один механизм степеней свободы, нам нужно остановить любое звено в этой цепочке. На рис. 8 представлены четыре варианта механизмов, построенных из замкнутой кинематической цепи ABCD, показанной на рис. 7, при фиксированных звеньях AD, AB, CB и CD.
3. Расчет степени свободы разработанных механизмов
Работоспособность разработанных механизмов может быть подтверждена аналитическим расчетом их степени свободы. Для этого воспользуемся структурным уравнением локального типа, разработанным Добровольским В. В. [24, 25]
В. [24, 25]
где W2 — количество степеней свободы или подвижность механизма с двумя общими наложенными связями, n — количество подвижных звеньев механизма, p5, p4 и p3 — номера одно-, двух- и трехстепенных кинематических пар. В нашем случае для всех механизмов с рис. 5 и 8 мы имеем одинаковые кинематические параметры: n=3, _p5=3, p4=1 и _p3=0. Вводим их в формулу (5) и получаем
Рис. 6. Положение кинематических пар в цепи ЗСКС
Рис. 7. Четырехзвенная замкнутая пространственная кинематическая цепь ЗСКС с двумя общими наложенными связями
W2 = 4n — 3 p5 — 2p, — p3,
W2 = 4n — 3p5 — 2p4 — p3 = 4 • 3 — 3 • 3 — 2-1 — 0 = 1,
это решение доказывает необходимость одновходное движение в механизмах и гарантирует для них одну степень свободы.
Рис. 8. Четырехстержневые пространственные механизмы с двумя общими наложенными связями, спроектированные из замкнутой кинематической цепи CRRS из формы Рис. по количеству наложенных ограничений и степени свободы кинематических пар.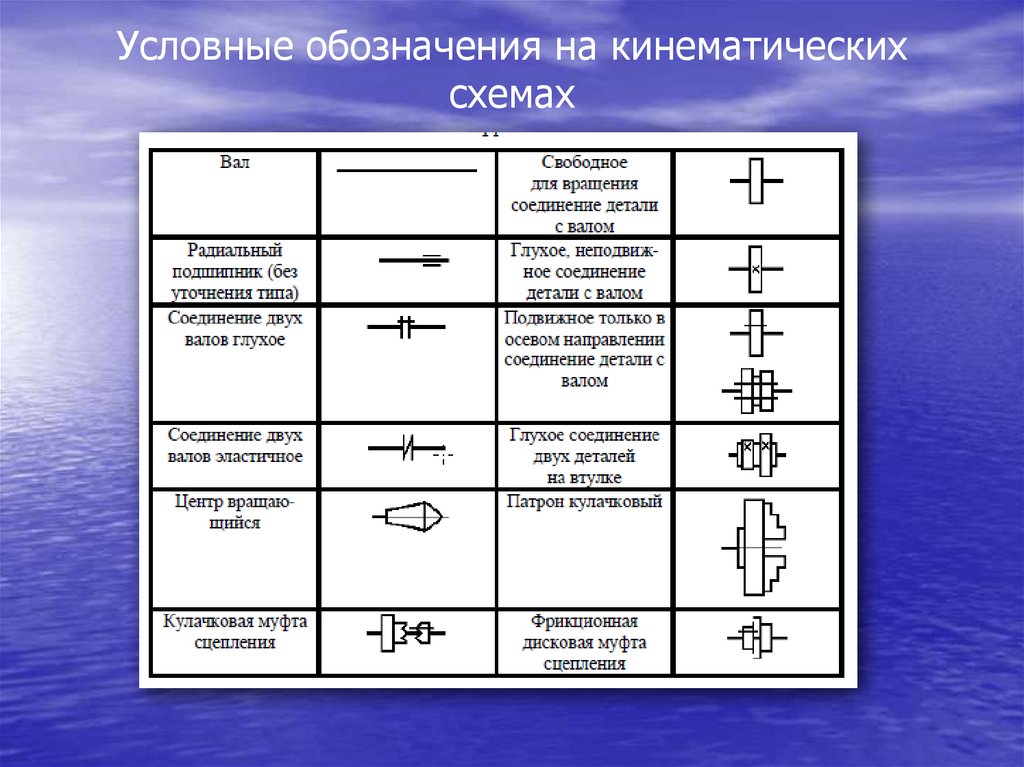
Было определено, что для решения [n=4, p5=3 (2-вращательные пары, 1-винтовая пара),p4=1 (цилиндрическая пара)], включающего два общих наложенных ограничения, можно построить две различные кинематические цепи , обозначены RCRS и CRRS. Другие варианты цепей изоморфны.
Разработаны две неизоморфные кинематические схемы механизмов с одной степенью свободы из цепной СККР и четыре схемы из цепной КРСК.
Продемонстрированный подход структурного синтеза с применением метода Грюблера может быть использован для проектирования пространственных механизмов с различным количеством накладываемых связей.
Благодарности
Исследование выполнено при финансовой поддержке Министерства образования и науки Российской Федерации (регистрационный номер RFMEF160714X0106).
Каталожные номера
[1] Л.В. Ассур, Исследование плоских стержневых механизмов с нижними парами с точки зрения их строения и классификации, акад. Изд-во СССР, 1952. (на рус. языке).
[2] L. T. Дворников, Л.Н. Гудимова, Проблема поиска разнообразия восьмистержневых плоских сочлененных групп Ассура, Журн. Мах. Теория. 1
T. Дворников, Л.Н. Гудимова, Проблема поиска разнообразия восьмистержневых плоских сочлененных групп Ассура, Журн. Мах. Теория. 1
(2008) 15-29. (на рус.).
3. Пейсах Э. Э., Классификация плоских групп Ассура, Журн. Мах. Теория. 9 (2007) 5-17. (на рус.).
[4] L.T. Дворников, Основы теории строения механизмов, Новокузнецк, 1994.
[5] L.T. Дворников, Опыт структурного синтеза механизмов, Журн. Мах. Теория. 2 (2004) 3-17. (на рус.).
[6] М. Грюблер, Общие характеристики неизбежных плоских кинематических цепей, Civil Ingenieur, Berlin. 29(1883) 167-200.
[7] M. Grübler, Gegtriebelehre, Теория принудительного хода и планарные механизмы, Springer-Verlag, Berlin, 1917.
[8] Н.И. Манолеску, История оригинальных методов, используемых при синтезе плоских кинематических цепей с различными степенями свободы, в: Материалы V конференции по теории машин и механизмов, Либерец. (1988) 145-157.
[9] Л.В. Цай, Дизайн механизма: перечисление кинематических структур в зависимости от функции, CRC Press LLC, Бока-Ратон, 2000.
[10] М. Чу, С.Н.Т. Шен, Г.Ф. Исса, Кинематический структурный синтез механизмов с использованием систем, основанных на знаниях, J. Mech. Дес. 117
(1995) 96-103.
[11] Т.С. Mruthyunjaya, Пересмотр кинематической структуры механизмов, J. Mech. Мах. Теория. 38 (2003) 279-320.
[12] X. Kong, C.M. Госселин, Типовой синтез параллельных механизмов, Springer, 2007.
[13] Р. Ализаде, К. Байрам, Э. Гезгин, Структурный синтез последовательных платформенных манипуляторов, J. Mech. Мах. Теория. 42 (2007) 580-599.
[14] В.А. Глазунов, С. Бриот, В. Аракелян, М.М. Грунтович, Н.М. Тхань, Разработка манипуляторов с параллельно-поперечной структурой, Журнал машиностроения и надежности. 37 (2008) 176-185.
[15] В.А. Глазунов, С.В. Левин, К.А. Шалюхин, М. Хаккёглу, В.Д. Тунг, Разработка механизмов параллельной структуры с четырьмя степенями свободы и частичной развязкой, Журнал машиностроения и надежности. 39 (2010) 407-411.
[16] К. Госселин, Дж.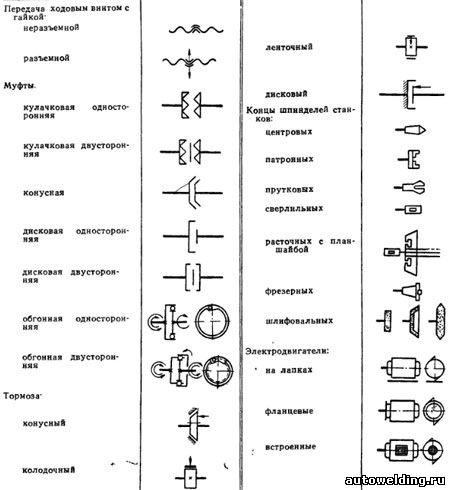 Анхелес, Анализ сингулярности кинематических цепей с обратной связью, Робототехника и автоматизация, IEEE Transactions on Robotics and Automation. 6 (1990) 281-290.
Анхелес, Анализ сингулярности кинематических цепей с обратной связью, Робототехника и автоматизация, IEEE Transactions on Robotics and Automation. 6 (1990) 281-290.
[17] J. Angeles, Пространственные кинематические цепи: анализ-синтез-оптимизация, Springer-Verlag, 2012.
[18] X. Kong, C.M. Госселин, Типовой синтез сферических параллельных манипуляторов с 3 степенями свободы на основе теории винтов, J. Mech. Дес. 126 (2004) 101108.
[19] Л.Т. Дворников, Основы общей (универсальной) классификации механизмов, Журн. Мах. Теория. 2 (2011) 18-29. (на рус.).
[20] А.В. Степанов, О современном уровне вычислительных решений задач механизмов структурного синтеза, Журн. Мах. Теория. 9
(2011) 25-32. (на рус.).
[21] AC Rao, P.B. Дешмукх, Компьютерный структурный синтез плоских кинематических цепей без проверки на изоморфизм, J. Mech. Мах. Теория. 36 (2001) 489-506.
[22] Э.А. Бутчер, К. Хартман, Эффективное перечисление и иерархическая классификация плоских кинематических цепей с простыми соединениями: применение к 12- и 14-звенным цепям с одной степенью свободы, J.