Введение. Начинаем собирать квадрокоптер своими руками
Начинаю цикл статей о том, как мы собирали квадрокоптер. Предупреждаю, мы не претендуем на роль учителей и наставников. Мы просто ведем блог о том, как мы собирали летающий аппарат. Так что ошибки будут, и если вы их заметили, то обязательно напишите об этом в комментариях.
Я не являюсь специалистом в области квадрокоптеростроения, поэтому не могу подробно и четко определить классификацию данного типа устройств. Но для себя определил, что в любительской нише существует четыре типа дронов:
- Маленькие квадрики для полетов по квартире. Чуть поиграл и забыл.
- Большие дроны для съемок. Имеют большие размеры, высокую грузоподъемность, слабую маневренность.
- Гоночные коптеры. Высокая скорость, трудная управляемость, полные штаны адреналина.
- Промежуточные варианты между этими тремя типами.
Мы решили собрать большой дрон для съемок. Все-таки для гоночных нужен опыт вождения, а мелкие дроны нам не интересны.
Почему мы решили собрать квадрокоптер, а не купить готовый?
Началось все с того, что я наткнулся на рекламу дешевых квадрокоптеров. Речь идет о квадриках типа Syma X8 и им подобных. Что-то зацепило и понеслось. Вначале искал что-нибудь подешевле и получше. Потом наткнулся в YouTube на самодельные агрегаты. Посмотрел, оценил свои возможности и принял решение собрать квадрик самому.
Так почему не готовый? Все просто! Хорошая управляемость, стабильность полета, а следовательно и красивая картинка на видео получается только на дорогих квадрокоптерах, цена которых 1000$ и выше. Единственный способ к ним приблизится, это собрать дрон самому. Правильный выбор комплектующих, тонкая настройка и терпение, смогут компенсировать лишние расходы и помогут собрать действительно хороший летательный аппарат. Но, это в теории!
Я уже вбухал в это дело кучу денег, потратил массу времени и сил, но все еще не доволен своими результатами. Может дело не в экономии и стремлении к идеалу, а в самом процессе сборки?
Какие знания нужно иметь, для того чтобы собрать квадрокоптер своими руками?
Если, например, при сборке компьютера практически нельзя совершить ошибку, т. к. там невозможно вставить что-нибудь не туда. То при сборке квадрокоптера ошибиться можно запросто. А цена такой ошибки – сгоревший модуль, возможно и не один. Добавим сюда сложность терминологии, закон Ома, мануалы на иностранных языках, наличие паяльника, напильника, лобзика и всевозможных отверток, массу свободного времени и значительные финансовые потери. В итоге получаем, что для сборки дрона нужно лишь нездоровое желание полетать на собственном детище.
к. там невозможно вставить что-нибудь не туда. То при сборке квадрокоптера ошибиться можно запросто. А цена такой ошибки – сгоревший модуль, возможно и не один. Добавим сюда сложность терминологии, закон Ома, мануалы на иностранных языках, наличие паяльника, напильника, лобзика и всевозможных отверток, массу свободного времени и значительные финансовые потери. В итоге получаем, что для сборки дрона нужно лишь нездоровое желание полетать на собственном детище.
Кстати, про «своими руками»! В конечном итоге, сборка квадрокоптера сводится к соединению проводами различных модулей между собой на готовой (купленной) раме, плюс их настройка и калибровка. Опытный моделист соберет такой дрон за несколько часов. Для нас, начинающих моделистов, все муки будут связаны с вопросами теоретической части, на решение которых уйдет больше 90% времени.
Сколько стоит собрать квадрокоптер?
Базовый комплект мне обошелся в 250 долларов (без видеокамеры). Закупался я на aliexpress и banggood. Брал не самые дешевые комплектующие, но и не бренд. Поэтому путь к сокращению расходов есть!
Брал не самые дешевые комплектующие, но и не бренд. Поэтому путь к сокращению расходов есть!
В эту сумму вошел не только сам квадрокоптер, но и масса сопутствующих ему товаров: зарядное устройство, запасной аккумулятор, сумочки, переходники, разъемы и т.д. Поэтому, если соберетесь строить второй летательный аппарат, то он обойдется значительно дешевле.
Подробнее о ценах узнаете в следующей статье о подборе комплектующих.
Теперь к делу…
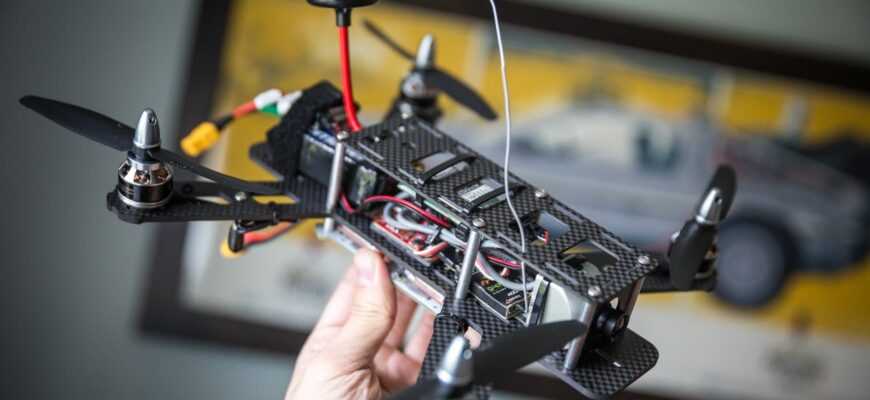
Как сделать квадрокоптер своими руками
Квадрокоптер — это не только весело и интересно. Такое устройство можно использовать для аэрофотографии, доставки небольших грузов, выполнения задач патрулирования, участия в соревнованиях. Именно для последней цели множество профессионалов предпочитает покупать не готовые модели, а собирать квадрокоптер своими руками. Сделать это можно и в домашних условиях. Главное — правильно подобрать комплектующие.
Содержание
- 1 С чего начинать
- 2 Готовые комплекты
- 3 Сборка в домашних условиях
- 3.
 1 Двигатели
1 Двигатели - 3.2 Выбор лопастей
- 3.3 Система управления
- 3.
- 4 Алгоритм сборки
- 5 В качестве заключения
- 6 Самые популярные квадрокоптеры
 1 Двигатели
1 ДвигателиС чего начинать
Первое, что стоит уяснить начинающему, который решил сделать квадрокоптер своими руками: обойтись без покупки специальных комплектующих не получится. Летающая четырехвинтовая машина представляет собой достаточно сложную компьютеризированную систему. Поэтому приобретение специальной управляющей платы, сигналы с которой будут стабилизировать и направлять мультикоптер — является обязательным.
Несколько советов помогут собрать дрон с высокими шансами на положительный результат.
- Не стоит делать самодельный квадрокоптер большим. Разумно начать с надежной, устойчивой и прочной модели.
- Двигатели для дрона нужно выбирать с запасом. Во-первых, этим достигается большая свобода при сборке рамы. Мощные двигатели компенсируют ошибки, связанные с недостаточной грузоподъемностью. Во-вторых, характеристики большинства моторов китайского производства завышены.
- Минимальное количество проводки и соединений позволит как уменьшить массу, которую будет иметь самодельный дрон, так и минимизировать наводки и потери на сопротивление.
 Во-вторых, характеристики большинства моторов китайского производства завышены.
Во-вторых, характеристики большинства моторов китайского производства завышены.И главное — не стоит сразу пытаться делать квадрокоптер с камерой. Это устройство (если хочется получать качественное изображение) не только громоздкое и довольно тяжелое, но и неизбежно разбалансирует дрон.
Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые наборы для сборки. Это так называемые комплекты ARF. В них входит минимальный набор компонентов, чтобы сделать дрон своими руками с предсказуемыми характеристиками. При этом владельцу предлагается некоторая свобода в модификации параметров изделия путем замены лопастей, батарей и других комплектующих.
Наборы ARF обычно включают:
- детали рамы;
- основная печатная плата;
- двигатели;
- лопасти;
- батареи;
- соединительные шлейфы;
- крепежные элементы.
После того, как самодельный квадрокоптер собран, на него устанавливают систему управления. Ее можно купить отдельно.
Совет! Рекомендуется приобретать комплект из пульта и приемника. Они полностью синхронизированы между собой и не требуют сложной настройки.
Еще одно достоинство комплектов ARF — широкие возможности модификации летных характеристик дрона. Можно собрать квадрокоптер с большим радиусом действия, подключая его к соответствующей системе управления. Или обеспечить хорошие характеристики маневренности, используя специальные пульты.
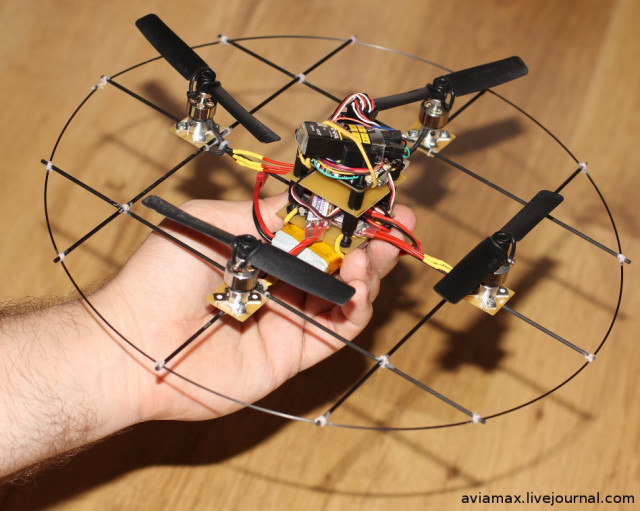
Сборка в домашних условиях
Квадрокоптер можно собрать самому, в домашних условиях. Без покупки сложных электронных компонентов обойтись не получится. А вот силовую раму с ногами двигателей можно сделать из подручных материалов. Есть несколько вариантов сборки. Раму можно сделать из пластиковых труб водопроводной сети или собрать конструкцию из тонкого алюминиевого профиля квадратного сечения.
Самый простой способ — выполнить раму из фанеры. Для этого потребуется квадрат, размеры которого подбираются под габариты будущего коптера. К основанию рамы из фанеры будут крепиться ноги двигателей. Это может быть как готовое изделие промышленного производства, так и вручную изготовленные детали. Пошаговая сборка силовой рамы выглядит следующим образом.
- Делается чертеж конструкции, вид сверху. Соблюдается угол 90 градусов между ногами, равное расстояние между двигателями по диагонали.
- Определяется габарит центральной части из фанеры или профиля, путем разметки необходимых мест крепления ног.
- Если ноги двигателей сделаны из подручных материалов, например, низкого профиля — необходимо предусмотреть надежное место для крепления двигателей.
Сделать всю работу самостоятельно получится только у людей с высоким уровнем навыка моделирования и использования ручных инструментов. Требуется максимальная точность и минимальное количество материала.
Совет! Для начинающих рекомендуется купить готовую раму для сборки. Пользователь сразу получает изделие, у которого предусмотрено место для размещения батарей, двигателей, до минимума снижена масса.
Двигатели
Рекомендуется приобретать для сборки коптера в домашних условиях готовый комплект двигателей с системой управления. Это избавит от возможных отклонений в оборотах и других сложностях балансировки. Если же хочется все собрать самому, включая систему подъемных двигателей, следует ориентироваться на:
- диаметр пропеллеров, который вычисляется по размерам рамы;
- габариты посадочного пространства для двигателя (площадь и высота боковой опоры-стенки).
Далее делается выбор двигателя по его маркировке. Производитель всегда указывает диаметр статора и высоту двигателя. К каждому изделию приводится тип и размер лопастей, рекомендуемых к применению. После этого, основываясь на массе беспилотника и оборотах двигателя при зависании (указывается в паспорте) — подбирается конкретная марка пропеллера.
Выбор лопастей
Лопасти — одна из простых деталей, которым мало уделяют внимания начинающие. От конструкции данного элемента зависят летные характеристики дрона в целом. Рекомендации по выбору лопастей следующие.
- Если собирается квадрокоптер с камерой, нужно добиться минимальных вибраций при движении. Это позволяют сделать двухлопастные пропеллеры.
- Трехлопастные пропеллеры дают больше тяги, но для приведения их в действие требуется большая мощность двигателя.
Второй главный фактор выбора лопастей — материал, из которого они изготовлены. Для начинающих, при сборке первых моделей, можно купить пластиковые пропеллеры. Но стоит помнить, что они не отличаются прочностью. Пластик деформируется, высыхает (меняет жесткость). Кроме этого, в ходе эксплуатации лопасти повреждаются пылью и другими взвесями в воздухе, из-за чего растет их аэродинамическое сопротивление.
Металлические пропеллеры — оптимальный выбор, если хочется получить долговечный дрон со стабильными характеристиками. Стоят такие изделия дороже пластика, но служат гораздо дольше, показывая стабильные характеристики. Стоит помнить, что металлические пропеллеры неизбежно потребуют двигатели большей мощности для своего вращения.
Стоят такие изделия дороже пластика, но служат гораздо дольше, показывая стабильные характеристики. Стоит помнить, что металлические пропеллеры неизбежно потребуют двигатели большей мощности для своего вращения.
Третий тип материалов, используемых для изготовления лопастей — композитные полимеры, многослойная конструкция. Такие пропеллеры легкие и прочные. Их цена высока, однако в области спортивных дронов композитные материалы лопастей не имеют конкурентов.
Важно! Если сборка квадрокоптера в домашних условиях планируется впервые, то при покупке лопастей не стоит экономить. Нужно внимательно изучать приводимую производителем разницу в массах отдельных пропеллеров в комплекте. На практике, покупая набор лопастных блоков дороже всего на 10% от средней цены, можно избавиться от работ по балансировке системы.
Система управления
Система управления, рекомендованная к покупке для начинающих, состоит из пульта и приемника, устанавливаемого на коптере.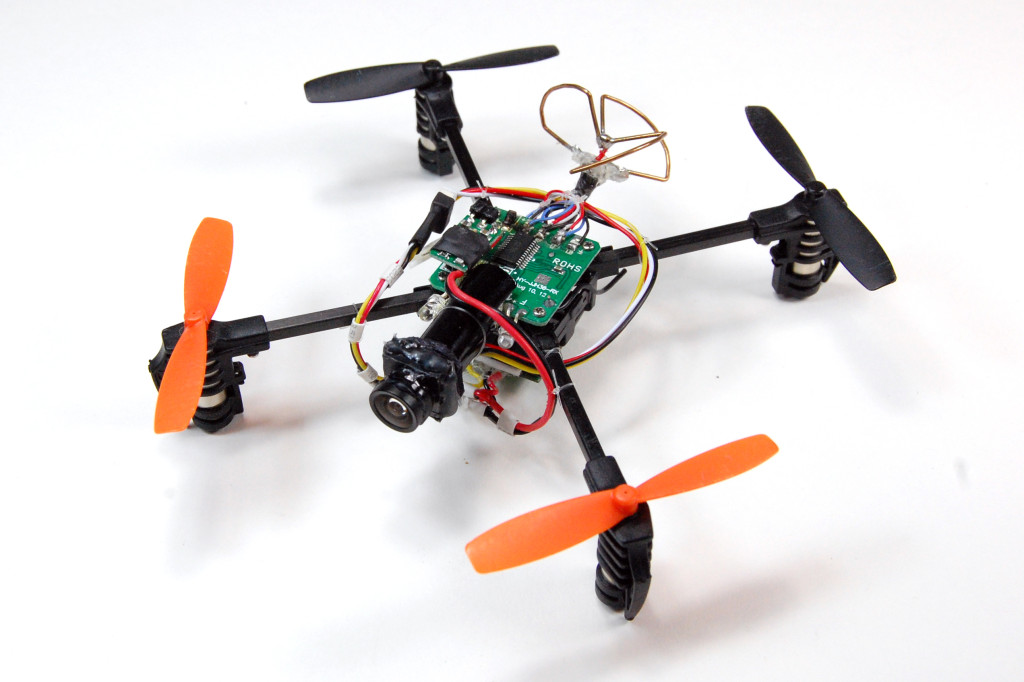 Сегодня на рынке представлено великое множество комплектов, предлагающих разный функционал. Например, может быть реализована:
Сегодня на рынке представлено великое множество комплектов, предлагающих разный функционал. Например, может быть реализована:
- система взаимодействия по радио или Wi-Fi каналу;
- GPS для ориентирования и движения по маршруту;
- схема позиционирования, работающая не в 2, а в 6 и более степенях свободы;
- система автоматического гашения инерции, позволяющая дрону висеть полностью неподвижно и сразу останавливаться при поступлении команды баз паразитных раскачиваний.
От класса решения напрямую зависит стоимость системы управления. Поэтому рекомендуется тщательно проанализировать сферу применения и задачи коптера перед выбором того или иного комплекта его электроники.
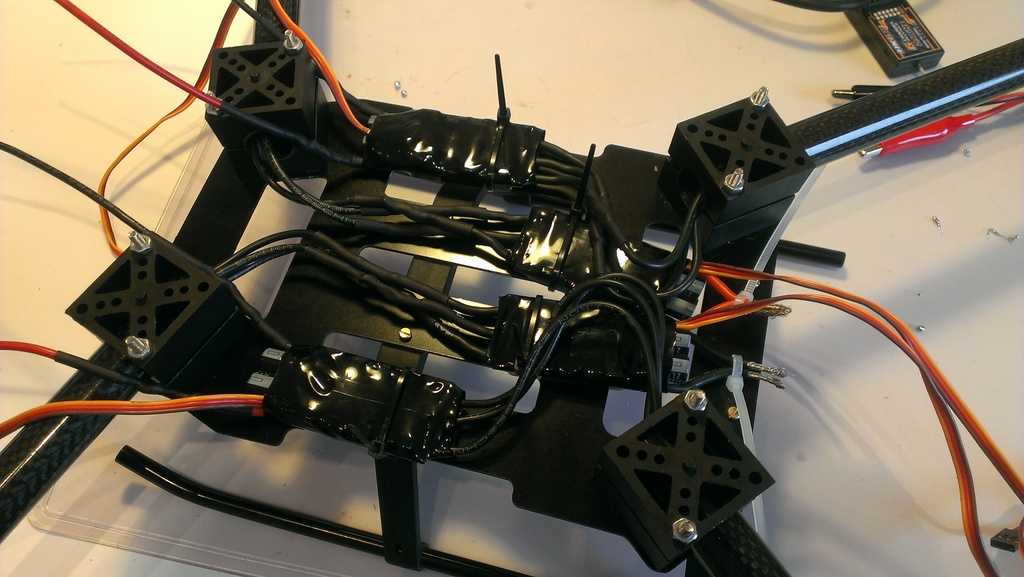
Алгоритм сборки
Сборка квадрокоптера не представляет большой сложности.
- Делается рама, сборкой готового комплекта или создания конструкции из подручных материалов.
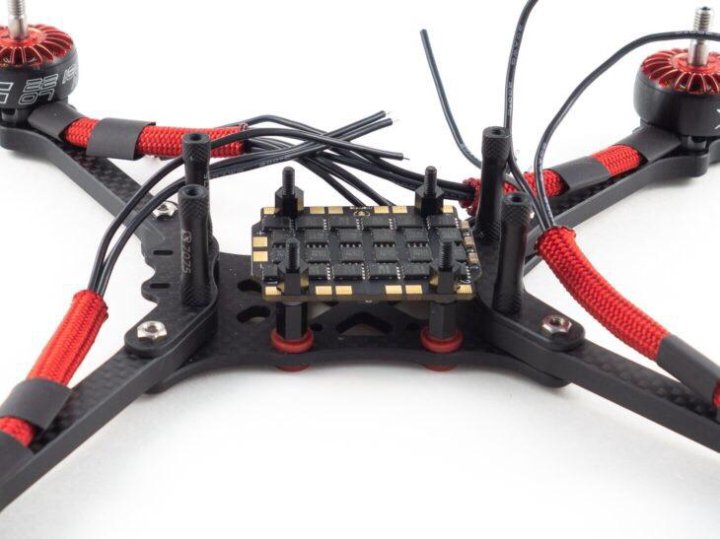
- На центральную пластину рамы крепится электроника управления. Это плата, регулирующая обороты двигателей и обрабатывающая сигналы с пульта.
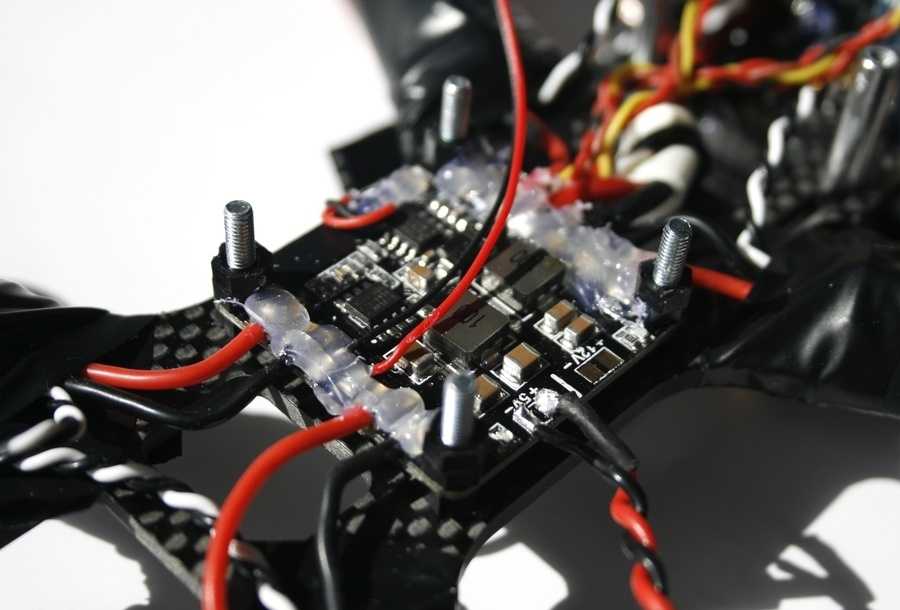
- К плате управления присоединяется приемник радиосигнала. Его можно закрепить на раме термоклеем.
- Строго на равных расстояниях от центра рамы до оси привода, на ногах сверлятся отверстия для крепления двигателей.
- Прокладываются провода, силовая сеть управления двигателями. Если покупался комплект оборудования, в нем есть все нужные проводники и инструкция. В случае, когда работа делается своими руками, стоит помнить: проводка соединяется в соответствии с типом управляющей платы, схема подачи питания параллельная.

Завершается сборка тщательным изолированием мест соединения проводов термоусадкой. При необходимости защиты плат управления от влаги, они накрываются кожухами. После этого можно присоединять аккумулятор и тестировать коптер в работе.
В качестве заключения
Если не экономить на покупке комплектующих, собрать самодельный дрон не составит труда. Достаточно действовать аккуратно, в соответствии с инструкциями производителя тех или иных компонентов. Как правило, после первой удачно собранной модели у начинающих появляются амбиции и желание собрать дрон с улучшенным функционалом. Чтобы минимизировать траты, следует предусмотреть такой вариант заранее. Например, купить плату управления, поддерживающую прямое подключение камеры или передачу сигнала на смартфон по протоколу Wi-Fi.
Как правило, после первой удачно собранной модели у начинающих появляются амбиции и желание собрать дрон с улучшенным функционалом. Чтобы минимизировать траты, следует предусмотреть такой вариант заранее. Например, купить плату управления, поддерживающую прямое подключение камеры или передачу сигнала на смартфон по протоколу Wi-Fi.
Самые популярные квадрокоптеры
Квадрокоптер DJI Mavic Air на Яндекс Маркете
Квадрокоптер DJI Mavic Air Fly More Combo на Яндекс Маркете
Квадрокоптер DJI Mavic 2 Pro на Яндекс Маркете
Квадрокоптер DJI Mavic 2 Zoom на Яндекс Маркете
Квадрокоптер DJI Spark Fly More Combo на Яндекс Маркете
камер FPV для дронов | Ключевые факторы и рекомендации
FPV означает просмотр от первого лица. Зачем нам камера? Правильный вопрос!!! Камера FPV должна обеспечивать пилоту прямую аналоговую видеотрансляцию, чтобы пилот мог маневрировать своим дроном. Видеопоток с этой камеры FPV поможет пилоту летать. HD-камеры — еще одна разновидность камер, используемых на коптерах. Теперь следующий вопрос, который приходит вам на ум, почему существует 2 разных типа камер?
Видеопоток с этой камеры FPV поможет пилоту летать. HD-камеры — еще одна разновидность камер, используемых на коптерах. Теперь следующий вопрос, который приходит вам на ум, почему существует 2 разных типа камер?
Подробнее…
Камеры FPV и HD — это два типа камер, которые служат двум разным целям.
Камеры FPV обеспечивают передачу видео с очень малой задержкой и исключительным качеством изображения.
HD-камеры записывают сверхчеткие видеоролики, на которые приятно смотреть.
Задержка HD-камеры слишком велика для передачи (примерно 150 мс) и, следовательно, не может использоваться для прямой передачи видео, тогда как FPV-камеры не могут записывать HD-видео (или могут!! Подробнее об этом ниже).
Быстрая навигация
Датчик визуализации- CCD или CMOS
Формульный фактор
Отношение сторон
Латентность
Входное напряжение
Поле вида
Видео-кодирование формата NTSC или PAL
Resolution
Широкий динамический RAGIC-RANGIN )
Работа при слабом освещении
Экранное меню (OSD)
HD-камеры для FPV
Настройки камеры
Традиционно пилоты FPV использовали относительно дорогие, большие и громоздкие HD-камеры, такие как Runcam 3 или GoPro Hero 7. Но Ушли в прошлое каменный век, когда крошечные миниатюрные FPV-камеры, такие как Runcam Split 2, с печатной платой 36×36, записывающей видео 1080p, стоили 1/4 стоимости GoPro и в 5 раз легче по весу.
Но Ушли в прошлое каменный век, когда крошечные миниатюрные FPV-камеры, такие как Runcam Split 2, с печатной платой 36×36, записывающей видео 1080p, стоили 1/4 стоимости GoPro и в 5 раз легче по весу.
Камеры FPV бывают всех форм и размеров. Чтобы упростить процесс покупки, ниже перечислены некоторые факторы, которые помогут человеку оценить FPV-камеру и выбрать подходящую.
Лучшая FPV-камера для дрона
Лучшие FPV-камеры со временем стали лучше: задержки значительно сократились, а качество изображения значительно улучшилось. Камеры FPV бывают разных размеров для различных применений квадроциклов, используемых сегодня.
Существуют преимущественно 3 основных размера камер FPV: стандартные или полноразмерные, микроразмерные и наноразмерные камеры.
Камеры стандартного размера в основном поэтапные из-за их громоздкости и были заменены камерами микроразмера, но стандартные камеры все еще используются сегодня из-за их надежности и прочности.
Камера FPV стандартного размера | Камера FPV микроразмера | Nano-sized FPV Camera | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
FPV Camera | Runcam Swift 2 | Caddx Ratel | Runcam Nano 2 | ||||||||||||||||
размеры | 28,8 x 26 x 26 мм | 19 x 19 x 19 мм | 14 x 14 x 16 м. | ||||||||||||||||
Weight | 14g | 8g | 3.2g | ||||||||||||||||
Camera Sensor | CCD | CMOS | CMOS | ||||||||||||||||
Соотношение сторон | Фиксированный 4:3 | Изменяемый 16:9, 4:3 9008 9008 Фиксированный0003 | |||||||||||||||||
Signal type | PAL | Changeable 16:9, 4:3 | Fixed 4:3 | ||||||||||||||||
Input voltage | 5 — 36 В | 5 — 40 В | 3 — 5,5 В | ||||||||||||||||
| . |
 0003
0003 0052
0052 Сам датчик камеры — это то, что Runcam называет ПЗС-датчиком Super HAD II с разрешением 600 ТВЛ. Сигнал камеры выводится в формате PAL и с соотношением сторон 4:3. Swift 2 также поставляется с 3 вариантами объектива: 2,5 мм при 130 ° FOV, 2,3 мм при 150 ° FOV и 2,1 мм при 165 ° FOV, и может питаться от батареи 6S Lipo. Камера также когда-то имела революционные функции, которые сейчас в основном избыточны, встроенное экранное меню, которое может отображать напряжение батареи, встроенный микрофон, который выводит звук, и черно-белый режим для полетов при слабом освещении. Функция экранного меню сделала его удобной покупкой для пилотов с неподвижным крылом, чтобы следить за напряжением батареи.
Сам датчик камеры — это то, что Runcam называет ПЗС-датчиком Super HAD II с разрешением 600 ТВЛ. Сигнал камеры выводится в формате PAL и с соотношением сторон 4:3. Swift 2 также поставляется с 3 вариантами объектива: 2,5 мм при 130 ° FOV, 2,3 мм при 150 ° FOV и 2,1 мм при 165 ° FOV, и может питаться от батареи 6S Lipo. Камера также когда-то имела революционные функции, которые сейчас в основном избыточны, встроенное экранное меню, которое может отображать напряжение батареи, встроенный микрофон, который выводит звук, и черно-белый режим для полетов при слабом освещении. Функция экранного меню сделала его удобной покупкой для пилотов с неподвижным крылом, чтобы следить за напряжением батареи.
 Ratel можно выбрать с объективом 1,66 мм или 2,1 мм, кроме того, объектив 2,1 мм также поставляется с фильтром нейтральной плотности.
Ratel можно выбрать с объективом 1,66 мм или 2,1 мм, кроме того, объектив 2,1 мм также поставляется с фильтром нейтральной плотности. Nano 4 поставляется с объективом 2,1 мм при 155 ° FOV и 1,8 мм при 170 ° FOV. Nano 4 теряет вес (2,9g) путем выбора корпуса датчика камеры из АБС-пластика, и ему пришлось отказаться от возможности работать в больших диапазонах напряжения. Разъемы припаяны, что избавляет вас от хлопот, связанных с пайкой этих маленьких контактных площадок. Но по цене и качеству изображения Runcam Nano 4 является лучшим в этой категории. Еще одним достойным упоминания является устройство Runcam Phoenix 2 Nano с переключаемыми пользователем соотношениями сторон и видеовыходами, которое может потреблять напряжение до 36 В при очень низком энергопотреблении.
Nano 4 поставляется с объективом 2,1 мм при 155 ° FOV и 1,8 мм при 170 ° FOV. Nano 4 теряет вес (2,9g) путем выбора корпуса датчика камеры из АБС-пластика, и ему пришлось отказаться от возможности работать в больших диапазонах напряжения. Разъемы припаяны, что избавляет вас от хлопот, связанных с пайкой этих маленьких контактных площадок. Но по цене и качеству изображения Runcam Nano 4 является лучшим в этой категории. Еще одним достойным упоминания является устройство Runcam Phoenix 2 Nano с переключаемыми пользователем соотношениями сторон и видеовыходами, которое может потреблять напряжение до 36 В при очень низком энергопотреблении.
 Камеры FPV преобразуют световые сигналы в электрические сигналы, чтобы их можно было передавать с помощью аналоговых видеопередатчиков.
Камеры FPV преобразуют световые сигналы в электрические сигналы, чтобы их можно было передавать с помощью аналоговых видеопередатчиков.
 Каждый кадр дрона отличается и поддерживает определенные размеры камеры. Следовательно, важно принять во внимание размер камеры перед покупкой камеры и иметь несовместимую камеру, которая слишком велика или слишком мала для использования в кадре, который вы собираетесь использовать.
Каждый кадр дрона отличается и поддерживает определенные размеры камеры. Следовательно, важно принять во внимание размер камеры перед покупкой камеры и иметь несовместимую камеру, которая слишком велика или слишком мала для использования в кадре, который вы собираетесь использовать.
 Это время, необходимое камере для преобразования изображения в электрические сигналы, называется задержкой. Чем меньше задержка, тем лучше.
Это время, необходимое камере для преобразования изображения в электрические сигналы, называется задержкой. Чем меньше задержка, тем лучше. Камеры имеют встроенный линейный BEC, который снижает напряжение до 3,3 В (внутреннее рабочее напряжение электроники внутри камеры составляет 3,3 В).
Камеры имеют встроенный линейный BEC, который снижает напряжение до 3,3 В (внутреннее рабочее напряжение электроники внутри камеры составляет 3,3 В).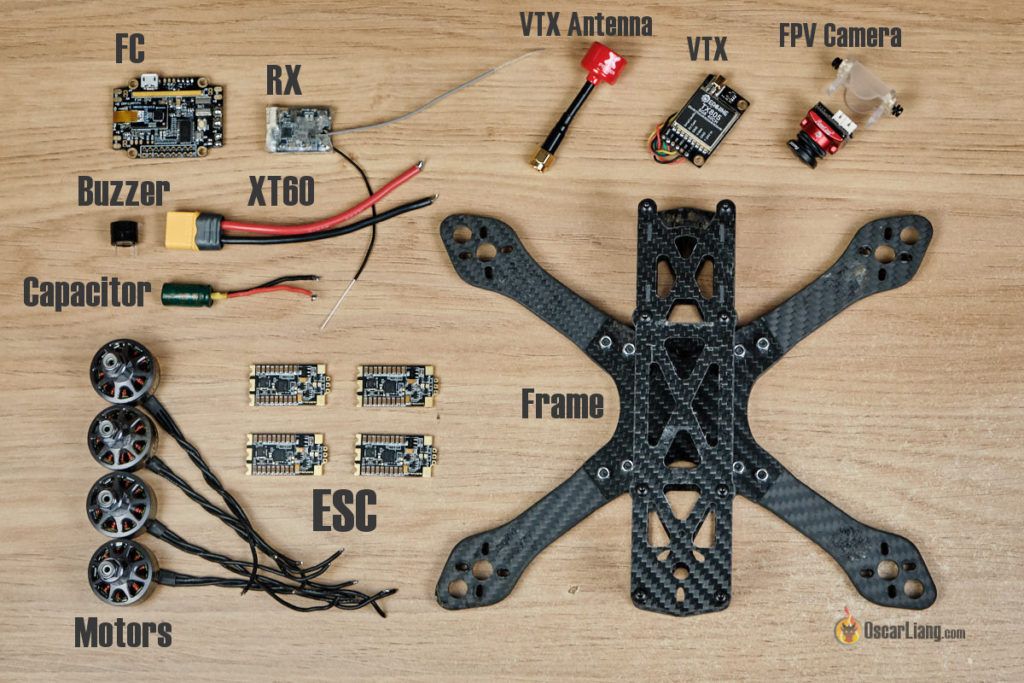 Напряжение в пределах 12В считается номинальным.
Напряжение в пределах 12В считается номинальным.Lens Size | FOV | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
1.8mm | 170° | ||||||||||||||||||
2.1mm | 150° | ||||||||||||||||||
2,3 мм | 140 ° | ||||||||||||||||||
2,5 мм | 130 ° 9008 | 130 ° 9008 | 130 ° 9003 9008 | 130 °. Формат кодирования видео — NTSC или PALКодирование видео — это процесс преобразования видеосигналов (в нашем случае электронов от камеры FPV) в формат, который может быть прочитан мониторами (мониторами FPV или очками). Обычно об этом заботится камера FPV. Наиболее часто используемыми форматами видео являются NTSC (Национальный комитет по телевизионным системам или PAL (Phase Alternating Line)).0010, а PAL имеет разрешение 720×576 при 25 кадрах в секунду . NTSC с более высокой частотой кадров обеспечивает плавное воспроизведение видео. PAL с его немного лучшим разрешением позволяет отображать более четкие тексты из экранного меню. TVL-разрешение камерыTVL означает TV Lines. TVL — это мера разрешения аналоговых камер. Камера 1000 ТВЛ может зафиксировать 500 черных и 500 белых чередующихся линий в одном кадре.
Wide Dynamic Ranging (WDR)Wide dynamic ranging is the fancy word referring to the camera’s ability для захвата ярких и темных частей изображения. Динамический диапазон — это разница между самыми темными и самыми яркими частями изображения. WDR появляется, когда вы летите на открытом воздухе, где солнце отбрасывает тени, и становится менее важным фактором при полете в пасмурные дни. На переэкспонированном изображении более яркие части изображения пересвечиваются, а на недоэкспонированном изображении более темные части изображения кажутся еще темнее. Хорошая камера с поддержкой WDR имеет идеальный баланс между передержкой и недодержкой. В большинстве современных FPV-камер WDR включен по умолчанию, но возможности WDR камеры обычно не публикуются производителем. Joshua Bardwell WDR Другие факторы, которые следует учитыватьХарактеристики при слабом освещенииРабота камеры, улавливающая свет, отражающийся от тела. Вечером и даже ночью, когда солнце не освещает, камеру становится очень трудно разглядеть. Производительность при слабом освещении, как следует из названия, — это способность камеры делать снимки в условиях очень слабого освещения. Производительность при слабом освещении не следует путать с WDR. Некоторые FPV-камеры заявляют о 0,00001 люкс (единица измерения освещенности) по сравнению с освещением гостиной среднего дома при 50 люкс. Таким образом, люди, летающие ночью, должны учитывать это как решающий фактор. Экранное меню (OSD) OSD — это способность камеры отображать полетную информацию. Но если камера будет использоваться на радиоуправляемом самолете, который не имеет специализированных чипов FC или OSD, информация OSD, предоставляемая камерой, становится существенной. HD-камеры для FPVHD-камеры, такие как показанная здесь GoPro hero 7, предназначены для записи HD-видео во время полета коптера. Камеры HD позволяют записывать видео с разрешением 720p (1280×720) или даже с разрешением 1080p (1920×1080) по сравнению с разрешением 360p (480×320) камеры FPV без HD. Так почему же люди используют HD-камеры, а не DVR (цифровую видеозапись) на своих очках? Ответ прост, Пилоты просто не любят использовать видео (которое имеет более низкое разрешение и заполнено статикой или шумом), предоставляемое видеорегистратором. Традиционно использовались большие громоздкие и дорогие HD-камеры, где приличная HD-камера стоила более 150 долларов. Но с развитием технологий HD-камеры превратились в крошечные печатные платы размером 36×36. Runcam split 2 На изображении выше показана Runcam split 2, одна из первых камер HD/FPV. Это улучшение не только устраняет необходимость в отдельных камерах FPV, предоставляя видеовыход для аналоговых vTx, тем самым уменьшая вес, а также записывая видео со скоростью 1080p/60fps. Видео записывается на SD-карту, а аксессуары включают в себя модуль Wi-Fi для беспроводной связи с доской. Хотя мы не рекомендуем эту FPV-камеру 2-в-1 для новичков, она будет прекрасным обновлением для пилотов среднего и продвинутого уровня и последующих. строит для новичка. Настройки камеры Настройки по умолчанию или заводские настройки обычно работают нормально, но эксперты сообщества FPV настраивают эти настройки и иногда получают лучшие результаты, чем заводские настройки. ЗаключениеИтак, что мы узнали, терминология камеры FPV, факторы, которые следует учитывать, и другие полезные функции, на которые следует обратить внимание при покупке. Эта статья пытается дать вам краткое представление и ни в коем случае не охватывает все. Каждый пилот летает в разных условиях, и, следовательно, рекомендуемая камера FPV может меняться, но факторы, которые следует учитывать, играют важную роль при покупке камеры FPV для ваших нужд. Если вы не уверены в себе, чтобы принять решение самостоятельно, ниже перечислены некоторые из лучших камер FPV на рынке. Похожие посты Узнайте, как создать собственный дрон с нуля Я знаю, о чем вы думаете. Слишком много слов, и я даже не уверен, что эта страница именно то, что я ищу . Если вы хотите узнать, как построить свой собственный дрон, вы находитесь в правильном месте. Есть много типов людей, которые могут быть заинтересованы в этом новом мире дронов. Тем не менее, это руководство предназначено для ботаников (и я имею в виду это как комплимент). Если вы один из этих любителей (эвфемизм для ботаника), позвольте мне быть вашим проводником в вашем путешествии по созданию самодельного дрона. Думай обо мне как о Гэндальфе, а о себе как о Фродо. Это слишком удачная аналогия, так как ваше новое увлечение дроном может превратиться в зависимость, как кольцо, которое вы никогда не захотите снимать. Так что будьте осторожны. Я отвлекся. Это руководство основано на моем курсе по созданию собственного дрона. Если вы хотите узнать больше об этом предмете, курс включает 6 часов видеолекций в структурированном учебном плане. Это идеальный курс для студентов колледжей и владельцев дронов, а также для тех, кто любит делать что-то своими руками и интересуется летающими роботами. Но я отвлекся 🙂 Прочитав это пошаговое руководство, вы узнаете:
Как показано в пункте 2, это руководство вооружит вас знаниями, позволяющими находить собственные детали, а не просто спаивать электронику из готового комплекта. собранный список деталей, которые входят в комплект дрона. Как говорится «Дай женщине рыбу, она будет сыта один день. Но научите женщину ловить рыбу, и она будет сыта всю жизнь», или что-то в этом роде. Возможно, у вас уже есть дрон определенного типа, который вы хотели бы построить, например, небольшой квадрокоптер FPV или более крупный октокоптер для подъема полезной нагрузки. Имея это в виду, данное руководство намеренно написано в общем виде, поэтому его можно использовать в качестве справочника для любого типа дронов. Если вы хотите собрать дрон, описанный в этом руководстве, ознакомьтесь с этим 9Список деталей 0009 Raspberry Pi Drone . А теперь приступим к созданию самодельных дронов! Хотите быть в курсе будущих проектов беспилотных летательных аппаратов? Зарегистрируйтесь ниже и никогда не пропустите. Основные инструменты, необходимые для сборки дрона
Основные части дрона для самодельного дрона Рама При выборе рамы вашего дрона необходимо учитывать два основных момента. Во-первых, сколько рук. Каждая рука обычно имеет один двигатель, который будет иметь один пропеллер. По этой причине дроны с несколькими двигателями называются просто «мультироторы». Трикоптер: дрон с тремя двигателями. Quadcopter: Дрон с четырьмя двигателями. Гексакоптер: дрон с шестью двигателями. Octocopter: дрон с восемью двигателями. Квадрокоптеры, безусловно, самые популярные, поэтому в этом руководстве мы сосредоточимся на том, как сделать квадрокоптер. Второе, что нужно знать о фреймах, это их размер. В размерах рамы указывается максимальное расстояние, на котором два двигателя находятся друг от друга. Для квадрокоптеров это обычно означает измерение расстояния между двумя диагональными двигателями в миллиметрах (извините, американцы). Нано Дрон: 80-100 мм Micro Drone: 100–150 мм Small Drone: 150–250 мм Medium Drone: 250–400 мм Large Drone: 9000+ 9000 мм нуля, выбор размера кадра будет вашим первым шагом. Двигатели Существует два основных типа двигателей: щеточные и бесщеточные. Ваши более дешевые готовые к полету дроны будут использовать коллекторные двигатели, и это потому, что они используют более дешевый двигатель. Несмотря на дешевизну, они изнашиваются и ломаются намного быстрее, чем бесколлекторные двигатели. Бесщеточные двигатели служат намного дольше и являются предпочтительным выбором для сборки дронов своими руками. Существует бесчисленное множество бесколлекторных двигателей. Чтобы помочь вам определить, какой двигатель лучше всего подойдет для вашей сборки, большинство производителей предоставляют вам некоторую информацию о продукте. Двумя наиболее распространенными характеристиками являются размер и рейтинг KV. Рассмотрим конкретный пример. Бесщеточный двигатель: 2213 935KV Здесь размер двигателя 2213. Это действительно представляет два числа и должно отображаться следующим образом: 22-13. 22 — это ширина статора в мм, а 13 — высота ротора в мм. Как правило, чем шире ширина, тем больше крутящий момент у двигателя. Еще одна характеристика бесколлекторных двигателей — рейтинг KV. На нашем примере двигателей это 935кВ. Не путайте кВ с киловольтами. Здесь рейтинг KV означает число оборотов в минуту на один входной вольт. Итак, если мы подадим 1 вольт на двигатель 935 кВ, он будет вращаться со скоростью 935 об/мин. Два вольта на входе вызовут 1870 об/мин и т. д. Двигатели с более низким значением KV производят гораздо больший крутящий момент, поэтому они могут вращать более крупные винты на меньших скоростях для получения подъемной силы. Большие двигатели KV производят гораздо меньший крутящий момент, но вращают винты меньшего размера намного быстрее, чтобы получить подъемную силу. Обычно более крупные дроны используют двигатели с низким KV, а более мелкие дроны используют двигатели с высоким KV. Последнее, о чем я хочу сказать, это то, что большинство производителей покажут вам спецификации деталей, которые следует использовать с двигателем, что может оказаться полезным при выборе деталей после того, как вы выбрали двигатели. Наш образец двигателя поставляется со следующей полезной информацией. Пропеллеры (реквизиты) Следующая часть этого руководства по созданию дрона — это пропеллеры. Пропеллеры всегда будут иметь четырехзначный номер, например 8045, 1045 или 6030. Первые две цифры обозначают диаметр винта в дюймах (ура, американцы!). Таким образом, винт 8045 будет иметь диаметр 8 дюймов. Последние две цифры обозначают шаг в дюймах. Пример 8045 имеет шаг 4,5 дюйма, а винт 6030 имеет шаг 3 дюйма. Шаг немного менее интуитивно понятен, чем диаметр. Качественно, чем выше высота тона, тем больше воздуха будет проталкиваться вниз. Чтобы понять, что на самом деле означает высота звука, воспользуемся аналогией. Винты также имеют шаг. Если вы повернете шуруп на один оборот в кусок дерева, он вонзится в дерево на некоторую постоянную глубину. Теперь давайте представим, что мы поместили шаг нашей опоры 8045 на винт, так что теперь винт имеет шаг 4,5 дюйма. Одно вращение винта заставит его врезаться в дерево на 4,5 дюйма. Теперь мы можем видеть, что чем выше шаг винта, тем больше вещества (воздуха) он будет перемещать. Винт с большим шагом обычно используется с двигателями с низким значением KV, поскольку они обеспечивают больший крутящий момент. Они могут вращаться медленнее, так как пропеллеры с высоким шагом выталкивают много воздуха на единицу оборота. Винты с меньшим шагом используются с двигателями с высоким KV, поскольку они вращаются намного быстрее. Соответственно, они должны вращаться быстрее, так как выталкивают меньше воздуха за один оборот. Электронные регуляторы скорости (ESC) Если вы используете бесщеточный двигатель, вам понадобится электронный регулятор скорости. Коллекторным двигателям не требуется ESC, потому что им нужен только простой вход постоянного напряжения. Бесколлекторные двигатели, с другой стороны, требуют ввода трех противофазных напряжений. Не волнуйтесь, это звучит страшнее, чем есть на самом деле. Все, что вам нужно сделать, это подать на ESC входное напряжение постоянного тока, и он автоматически сгенерирует три противофазных напряжения, которые подключаются к двигателю, заставляя его вращаться. Ваш производитель сообщит вам диапазон входных напряжений, которые может выдержать ваш ESC, так что следите за этим. Обычно ваш ESC поставляется с тремя выходами, и вы припаяете несколько штыревых коннекторов к концам, которые будут присоединены к штыревым коннекторам моторов. Литий-полимерный аккумулятор (батарея Lipo) Аккумулятор питает все компоненты дрона. Почти всегда в качестве аккумулятора для дронов выбирают аккумулятор Lipo. Это связано с его атрибутами высокой емкости и высокого выходного тока. Типичная батарея Lipo имеет следующие характеристики: 3000 мАч 4S 50C Количество ячеек Lipo Начнем с части 4S. Аккумуляторная батарея представляет собой набор отдельных маленьких батареек, называемых ячейками. Липоэлемент всегда имеет напряжение 4,2 В, когда он полностью заряжен, и 3,7 В, когда он разряжен. Таким образом, 4S означает, что четыре из этих Lipo-ячеек были помещены последовательно. Поскольку батареи, соединенные последовательно, добавляют напряжения, мы знаем, что полностью заряженное напряжение всей аккумуляторной батареи составляет: (Число ячеек) (Напряжение полностью заряженного аккумулятора) = (4 ячейки) (4,2 В) = 16,8 В Емкость Индивидуальная липо-ячейка Переходим к спецификации мАч. ПРЕДУПРЕЖДЕНИЕ О СУПЕР-БОТАНИКАХ. ПЕРЕЙДИТЕ К C-РЕЙТИНГУ, ЕСЛИ ВАС НЕ ВАЖНЫ ЕДИНИЦЫ! Но подождите! В мАч нет единиц кулонов! На самом деле это так, но это просто скрыто. Позволь мне объяснить. 1 Ампер = 1 Кулон/секунда = 1 Кл/с 1 час = 1 час = 3600 секунд м = милли = 1/1000 Итак, подставив наши переменные в мАч: 3000 мАч = 3000( 1/1000)(1 C/S)(3600 с) = 10800 кулонов Таким образом, 3000 мАч — это то же самое, что сказать 10800 кулонов. Следующая часть — рейтинг C Рейтинг C Чем выше рейтинг C, тем выше выходной ток для этой батареи. Чтобы узнать максимальный выходной ток, который может выдержать ваша батарея, возьмите показатель C и умножьте его на емкость вашей батареи в Ач. Рейтинг C измеряется в обратных часах (1/час) 3 Ач*50(1/ч) = 150 А Таким образом, эта гипотетическая батарея 50C может выдавать ток 150А! Теперь есть некоторая путаница в отношении того, что на самом деле означает рейтинг C. Плата распределения питания (PDB) Плата распределения питания с разъемом для батареи Плата распределения питания — это то место, где будут подключаться основные электрические компоненты. Основные элементы, которые вы будете припаивать к PDB, — это регуляторы скорости и разъем для аккумулятора. Когда вы подключаете аккумулятор к PDB, он подает питание на все, что к нему подключено, поэтому ваши ESC будут получать ток именно от него. Контроллер полета Контроллер полета — это, по сути, мозг дрона. По сути, это аппаратный концентратор, к которому будут подключаться все части вашего дрона. Такие вещи, как ESC, GPS, телеметрия, вход RC и многие другие компоненты. Все полетные контроллеры должны быть оснащены гироскопом и акселерометром (IMU), которые вместе помогают автоматически балансировать дрон без какого-либо ручного ввода. Плата контроллера полета Pixhawk Все контроллеры полета управляются прошивкой. В зависимости от полетного контроллера у вас может быть доступ к прошивке новой прошивки на плату. Прошивка может быть либо с закрытым исходным кодом (собственность компании, недоступной для общественности), либо с открытым исходным кодом (общедоступный может видеть код и вносить изменения). Если вы хотите сделать дрон с прошивкой с открытым исходным кодом, такой как ArduPilot или PX4, убедитесь, что плата, которую вы покупаете, поддерживается. GPS Модули GPS можно купить довольно дешево. Обычно они используют протокол UART или I2C, и большинство GPS-модулей, предназначенных для использования дронами, также оснащены магнитометром. Вы должны поднять модуль GPS/магнитометра в воздух, чтобы уйти от магнитных полей, создаваемых электроникой вашего дрона. Если ваш GPS находится слишком близко к электронике, это может привести к неверным показаниям, вызывающим забавный полет. Вы хотите построить дрон с хорошим модулем GPS. Ищите тот, у которого есть чип M8N u-blox. Они намного лучше, чем некоторые другие модули GPS, доступные на Amazon, и стоят примерно столько же. Контроллер RC Передатчик радиоконтроллера Контроллер RC будет состоять из передатчика (предмет, который держит пилот) и приемника (для приема команд от пилота). Приемник подключится к вашему полетному контроллеру. У вас есть несколько вариантов с RC-контроллером. Более дешевые RC-контроллеры имеют меньшее количество каналов. Однако минимальное количество каналов, которые вы должны использовать, составляет, вероятно, пять или шесть для дрона. Радиоуправляемый приемник Каждый дрон автоматически занимает четыре канала с помощью элементов управления Roll, Pitch, Yaw и Throttle. Избыточные каналы можно использовать для более уникального управления, например, для изменения режима полета мультикоптера. Телеметрия Телеметрия также используется для беспроводной связи с дроном. Вы определенно хотите построить дрон с телеметрией. Один модуль будет прикреплен к дрону, а другой к компьютеру (иногда его называют наземной станцией управления GCS). Обычно это plug and play. Затем GCS может удаленно связываться с дроном. Он может как отправлять, так и получать информацию. Модули телеметрии Например, GCS может отслеживать положение дрона на карте, определять скорость движения дрона, видеть уровень заряда батареи и многое другое. Его также можно использовать для управления дроном, а это значит, что для его управления вам не понадобится пульт дистанционного управления. Хотя это возможно и реально делается, телеметрия в основном используется для получения данных от дрона. Как правильно выбрать запчасти? Прежде чем вы начнете собирать детали и собирать дрон, нам нужно знать, как найти нужные детали. Основным показателем, который мы будем рассматривать, является отношение тяги к весу, далее именуемое отношением TW. TW СоотношенияМы все умеем думать о весе. Это сила, с которой нас притягивает к земле. Дроны также имеют вес и могут летать только в том случае, если они могут создавать восходящую тягу, превышающую их вес. Таким образом, коэффициент TW, равный 2, означает, что дрон может производить восходящую силу в два раза больше, чем его вес. Вы должны стремиться к разным отношениям TW в зависимости от применения вашего дрона. По этой причине определение целевого отношения TW — это первый шаг в процессе разработки собственного дрона, поскольку вы будете выбирать детали для достижения этой цели. Если вы хотите летать на агрессивном дроне с видом от первого лица, обычно используется коэффициент TW от 4 и выше, но я видел и 11. но вы можете летать с таким низким коэффициентом TW, как 1,5. Если коэффициент TW у вашего дрона равен 1, то далеко вы не улетите. Оценка отношения тяги к весу Чтобы оценить отношение TW, вам нужно начать с оценки веса вашего дрона. Это означает просмотр приведенного выше списка деталей и добавление веса различных компонентов (таких как двигатели, ESC, полетный контроллер и т. д.). Вы должны начать с рамы, которую хотите построить, и выбрать оттуда детали. Допустим, ваша оценка веса дрона, который вы хотели построить, составляет 1000 граммов. Если бы у вас была цель TW 2, это означало бы, что вам потребуется тяга 2000 граммов. Для квадрокоптера это будет означать тягу в 500 граммов на каждый мотор. Тяга к весу Оценка тяги двигателя зависит от напряжения батареи, размера винта и выбора двигателя. Измените одну из этих переменных, и вы измените силу создаваемой тяги. Я предпочитаю выбирать двигатели тех производителей, которые предоставляют таблицы тяги. В таблицах тяги есть эмпирические данные, которые показывают, сколько граммов тяги у вас будет для разных переменных. Ниже приведен пример таблицы осевых нагрузок для двигателей eMax 2213 кВ. Для простоты предположим, что максимальная тяга этого двигателя на самом деле была максимальной величиной тяги, указанной в этой таблице. У нас будет максимум 670 граммов тяги при использовании 1045 пропеллеров/батареи 11 В или 49 граммов.0 грамм при использовании батареи 8045 prop/11V. Таким образом, если бы мы использовали винты 8045, мы могли бы создать 1960 граммов тяги (490 г * 4 двигателя) при 11 В. При использовании 1045 винтов мы могли бы создать 2680 грамм тяги (670 г * 4 двигателя) при 11 В. При TW = 2, имея 1960 граммов тяги при 1000 граммах веса, мы довольно близко подошли бы к нашей цели. Если вы хотите более подробно изучить, как выбирать детали для сборки дрона, мой курс по сборке дронов подробно расскажет об этом! Соберите дрон из выбранных деталей
Правильное направление вращения двигателя  Это также можно сделать с помощью двухстороннего скотча или других средств, таких как винты. Это также можно сделать с помощью двухстороннего скотча или других средств, таких как винты.Установка крепления GPS Как откалибровать регуляторы менее чем за 5 минут (2020) Посмотрите это видео на YouTube  |
 . С большим полем зрения становится трудно наблюдать мельчайшие детали, такие как ветки деревьев. С нашими ограниченными vTx все становится намного хуже. Поле зрения между 130-150° считается идеальным для значительного обзора и исключительной детализации. На приведенной ниже диаграмме показана камера с узким и широким полем зрения.
. С большим полем зрения становится трудно наблюдать мельчайшие детали, такие как ветки деревьев. С нашими ограниченными vTx все становится намного хуже. Поле зрения между 130-150° считается идеальным для значительного обзора и исключительной детализации. На приведенной ниже диаграмме показана камера с узким и широким полем зрения. Но это зависит от ваших личных предпочтений. Выберите формат видео, который вам подходит. Поскольку большинство камер FPV поддерживают оба формата, будет проще переключиться туда-сюда и выбрать тот, который работает.
Но это зависит от ваших личных предпочтений. Выберите формат видео, который вам подходит. Поскольку большинство камер FPV поддерживают оба формата, будет проще переключиться туда-сюда и выбрать тот, который работает. 43 MP
43 MP
 Экранное меню на камере может предоставить нам только основную информацию, такую как приблизительное напряжение батареи. Если вы летите на квадроциклах, этот фактор не так важен, потому что контроллеры полета дрона имеют специальные чипы OSD, чтобы позаботиться об этом.
Экранное меню на камере может предоставить нам только основную информацию, такую как приблизительное напряжение батареи. Если вы летите на квадроциклах, этот фактор не так важен, потому что контроллеры полета дрона имеют специальные чипы OSD, чтобы позаботиться об этом. Этот HD-видеопоток можно использовать для аэрофотосъемки, инспекций или загружать видео на Youtube и демонстрировать навыки пилота.
Этот HD-видеопоток можно использовать для аэрофотосъемки, инспекций или загружать видео на Youtube и демонстрировать навыки пилота. Каждая FPV-камера уникальна, поэтому рекомендуется просматривать веб-страницы и проверять, стоит ли вносить изменения в настройки, которые могут работать или не работать для вашего конкретного использования.
Каждая FPV-камера уникальна, поэтому рекомендуется просматривать веб-страницы и проверять, стоит ли вносить изменения в настройки, которые могут работать или не работать для вашего конкретного использования. Позвольте мне подытожить:
Позвольте мне подытожить: Студенты использовали этот курс в качестве стартовой площадки для создания своих собственных приложений для дронов, поэтому я настоятельно рекомендую ознакомиться с ним, если вы пытаетесь разработать новую инновацию в области дронов.
Студенты использовали этот курс в качестве стартовой площадки для создания своих собственных приложений для дронов, поэтому я настоятельно рекомендую ознакомиться с ним, если вы пытаетесь разработать новую инновацию в области дронов. Прелесть хобби с дроном заключается в том, что анатомия дрона практически одинакова для любого типа дрона, который вы хотите построить.
Прелесть хобби с дроном заключается в том, что анатомия дрона практически одинакова для любого типа дрона, который вы хотите построить.
 Избегайте этого ужаса, поместив изолятор вокруг металлических соединителей пуль.
Избегайте этого ужаса, поместив изолятор вокруг металлических соединителей пуль.


 Пропеллер с шагом 0 дюймов будет похож на вращение ножа для масла.
Пропеллер с шагом 0 дюймов будет похож на вращение ножа для масла.
 Выбор правильной батареи имеет решающее значение для создания дрона.
Выбор правильной батареи имеет решающее значение для создания дрона. Это мера емкости, а емкость обычно измеряется в кулонах заряда. Думайте о емкости как об объеме контейнера с жидкостью; он просто показывает, сколько заряда находится в аккумуляторе.
Это мера емкости, а емкость обычно измеряется в кулонах заряда. Думайте о емкости как об объеме контейнера с жидкостью; он просто показывает, сколько заряда находится в аккумуляторе. Рейтинг C некоторых производителей просто означает максимальный импульсный ток, который вы можете выдать в течение 30 секунд, а другие используют рейтинг C для обозначения максимального непрерывного выходного тока. Обратитесь к производителю аккумуляторов, чтобы определить, какой рейтинг C они используют!
Рейтинг C некоторых производителей просто означает максимальный импульсный ток, который вы можете выдать в течение 30 секунд, а другие используют рейтинг C для обозначения максимального непрерывного выходного тока. Обратитесь к производителю аккумуляторов, чтобы определить, какой рейтинг C они используют!
 Процесс выбора правильных частей дрона представляет собой смесь искусства и науки.
Процесс выбора правильных частей дрона представляет собой смесь искусства и науки.

 Обычно это середина или нижняя часть кадра. Закрепить PDB можно с помощью стяжек
Обычно это середина или нижняя часть кадра. Закрепить PDB можно с помощью стяжек