Скорость вращения ротора больше скорости вращения магнитного поля статора
|
КАТЕГОРИИ: Археология
ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрации Техника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Балочные системы. Определение реакций опор и моментов защемления
|
⇐ ПредыдущаяСтр 2 из 6Следующая ⇒ К СИНХРОННЫМ относятся двигатели, у которых… скорость вращения ротора меньше скорости вращения магнитного поля статора скорость вращения ротора не зависит от скорости вращения магнитного поля статора Скорость вращения ротора равна скорости вращения магнитного поля статора скорость вращения ротора больше скорости вращения магнитного поля статора Частота вращения магнитного поля статора асинхронного двигателя и частота вращения ротора связаны соотношением n1>n2 n1<n2 n1+n2=0 n1=n2 Если асинхронный двигатель подключен к трехфазной сети частотой 50 Гц и вращается с частотой вращения 3000 об/мин, то он имеет количество полюсов Два Один Три Четыре Асинхронные двигатели с фазным ротором отличаются от двигателя с короткозамкнутым ротором… Наличием контактных колец и щеток отсутствием контактных колец и щеток наличием коллектора наличием фазных обмоток
Если ротор вращается в ту же сторону, что и магнитное поле, но с большей скоростью, то асинхронная машина… Работает в режиме генератора работает в режиме двигателя электромагнитного тормоза отключен от сети Магнитопровод асинхронного двигателя набирают из тонких листов электротехнической стали, изолированных лаком друг от друга, для… Уменьшения потерь на вихревые токи или токов Фуко уменьшения потерь на гистерезис увеличения магнитодвижущей силы увеличения потерь на вихревые токи или токи Фуко
Частота вращения магнитного поля синхронной машины n0 и частота вращения ротора n связаны соотношением… СИНХРОНИЗМ в машинах означает вращения магнитного поля статора и ротора с одинаковой скоростью Если скорость вращения магнитного поля статора СИНХРОННОЙ четырехполюсной машины 1500 об/мин, то номинальная скорость вращения ротора Об/мин 3000 об/мин 1000 об/мин 500 об/мин
Если скорость вращения магнитного поля статора СИНХРОННОЙ четырехполюсной машины 3000 об/мин, то номинальная скорость вращения ротора 1500 об/мин Об/мин 1000 об/мин 500 об/мин
Частота ЭДС, создаваемой на статоре синхронной машины, определяют соотношением…
Для подведения постоянного напряжения к обмотке возбуждения ротора синхронной машины используется… два контактных кольца(напряжение к обмотке возбуждения подводится от источника постоянного тока, т. одно контактное кольцо три контактных кольца четыре контактных кольца На рисунке изображены роторы электрических двигателей … а – явнополюсный ротор синхронного двигателя; б – неявнополюсный ротор синхронного двигателя
а – неявнополюсный ротор синхронного двигателя; б – явнополюсный ротор синхронного двигателя а – фазный ротор асинхронного двигателя; б – короткозамкнутый ротор асинхронного двигателя а – короткозамкнутый ротор асинхронного двигателя; б – фазный ротор асинхронного двигателя ⇐ Предыдущая123456Следующая ⇒ Читайте также: Психологические особенности спортивного соревнования Приготовление дезинфицирующих растворов различной концентрации Занятость населения и рынок труда Социальный статус семьи и её типология |
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 2678; Нарушение авторского права страницы; Мы поможем в написании вашей работы!
infopedia.
|
 Все правила по сольфеджио
Все правила по сольфеджио
 е. два кольца для подведения ПЛЮСА и МИНУСА)
е. два кольца для подведения ПЛЮСА и МИНУСА) su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 38.242.236.216 (0.003 с.)
su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 38.242.236.216 (0.003 с.)2.4. Скорость вращения магнитного поля там
Условимся
индексом 1 обозначать величины, относящиеся
к статору, а индексом 2 – к ротору.
Скорость вращения магнитного поля
принято оценивать частотой вращения,
обозначаемой n1
и измеряемой в об/мин. Найдем как зависит
скорость вращения магнитного поля от
числа пар полюсов. По истечении времени,
равного половине периода переменного
тока, направления всех токов изменятся
на обратные, поэтому магнитные полюсы
меняются местами, т.е. за половину периода
магнитное поле поворачивается на часть
оборота равную одному полюсному делению
.
За один период переменного тока поле
поворачивается на два полюсных деления
2
или на
оборота, где р – число пар полюсов.
Следовательно, угловая скорость вращения
магнитного поля равна
мех1=
(2. 6)
6)
Из
последнего выражения видно, что
многополюсное магнитное поле вращается
в пространстве медленнее двухполюсного
в число раз, равное числу пар полюсов.
Выразив
мех
через частоту вращения магнитного поля
n1, получим
. (2.7)
Откуда
окончательно получаем
. (2.8)
Из
формулы (2.8) следует, что частота вращения
магнитного поля при промышленной частоте
f=50
Гц самая максимальная у двухполюсных
двигателей
n1=60f/р=6050/1=3000
об/мин
С
увеличением числа пар полюсов частота
вращения уменьшается: при р=2 n1=1500
об/мин, при р=3 n1=1000
б/мин.
2.5. Скольжение
Обозначим
через n2
– частоту вращения ротора асинхронной
машины. У асинхронных машин обязательно
выполняется условие n2n1
т.е. скорость вращения ротора в любом
режиме работы не равна скорости
вращающегося магнитного поля.
Скорость
вращения магнитного поля относительно
ротора называют скольжением. Обычно
Обычно
скольжение выражают в процентах в долях
от скорости вращения магнитного поля
и обозначают буквой s
. (2.9)
2.6. Режим работы там
В
зависимости от соотношения скоростей
вращения магнитного поля и ротора
трехфазная асинхронная машина может
работать в трех режимах: электрического
двигателя, генератора, электромагнитного
тормоза.
ТАМ,
ротор который вращается в направлении
вращения магнитного поля со скоростью
превышающей скорость поля является
генератором. Следовательно для ТАГ
n1<n2,
s<-1 (рис.2.4).
Чтобы
получить такой режим работы необходимо
с помощью внешнего приводного двигателя
вращать ротор ТАМ со скоростью превышающей
скорость вращения магнитного поля.
В
режиме электрического двигателя ротор
и магнитное поле вращаются в одном
направлении. Причем скорость магнитного
поля превышает скорость вращения
магнитного поля, следовательно для ТАД
n1>n2,
1>s>0.
В
режиме электромагнитного тормоза
асинхронная машина работает в том
случае, когда ее ротор и магнитное поле
вращаются в разных направлениях, но
скорость магнитного поля больше, чем
скорость вращения ротора. Следовательно
Следовательно
для ТАТ |n1|>|-n2|, s>1,
а электромагнитный момент, возникающий
от взаимодействия токов ротора с
магнитным полем, будет оказывать
тормозящее действие на ротор.
Наибольшее
распространение получил двигательный
режим.
Рис.2.4.
Режимы работы ТАМ
2.7. Принцип действия трехфазного асинхронного двигателя (тад)
Принцип
действия рассмотрим на примере ТАД с
короткозамкнутым ротором. При подключении
обмотки статора к трехфазной сети в ней
протекают трехфазные токи, которые
возбуждают в магнитопроводе круговое
вращающееся магнитное поле, частота
вращения которого определяется выражением
,
где
f1
– частота сети; р – количество пар
полюсов.
Силовые
линии магнитного поля пересекают стержни
обмотки ротора и возбуждают в них ЭДС.
Поскольку обмотка короткозамкнутая в
ней, за счет наведенной ЭДС, возникает
ток. При взаимодействии проводников с
током с магнитным полем возникает
вращающий момент. Под действием этого
Под действием этого
момента ротор начинает вращаться в
направлении вращения магнитного поля.
По мере возрастания скорости вращения
ротора n2,
скорость n1-n2
относительно его движения в равномерно
вращающемся магнитном поле уменьшается.
В связи с этим уменьшаются величины ЭДС
(т.к. е=Blv),
тока и вращающего момента М. При некоторой
скорости вращения ротора (n2<n1)
наступит равновесие между вращающим
моментом Мвр,
моментом сопротивления, складывающимся
из момента нагрузки Мнаг
и момента М0
(момента холостого хода), необходимого
для преодоления сил трением в подшипниках
и сил торможения в вентиляторе.
Мвр=Мнаг+М0.
(2.10)
Уравнение
(2.10) называется уравнением равновесия
моментов. Скорость вращения ротора при
равновесии моментов остается постоянный.
Таким
образом, принцип работы асинхронных
двигателей основан на взаимодействии
вращающегося магнитного поля с токами,
которые наводятся этим полем в проводниках
ротора. Ротор и магнитное поле вращаются
Ротор и магнитное поле вращаются
в пространстве в одном направлении, но
с разными скоростями. Скорость вращения
ротора двигателя всегда меньше скорости
вращения магнитного поля.
Двигатели переменного или постоянного тока?
Очевидно, мы имеем в виду не AC-DC, группу «Highway to Hell» и «Back in Black». Вместо этого мы задаем вопрос, чей ответ определяет первый инженерный выбор, другими словами «двигатель переменного или постоянного тока»?
Стоит отметить, что этот выбор касается только типа питания двигателя, еще до выбора точного технологического решения. Фактически тип источника питания определяет некоторые важные конструктивные характеристики привода и, следовательно, влияет на тип его использования и относительные характеристики.
Попробуем тогда дать ответ на вопрос: AC или DC?
Большие, массивные и мощные, они являются наследием эпохи, когда регулирование, ожидающее будущих методов ШИМ, было возможно только в системах постоянного тока.
В частности, наиболее эффективные конструктивные типологии двигателей постоянного тока предусматривали возможность независимого регулирования напряжения и тока возбуждения (т.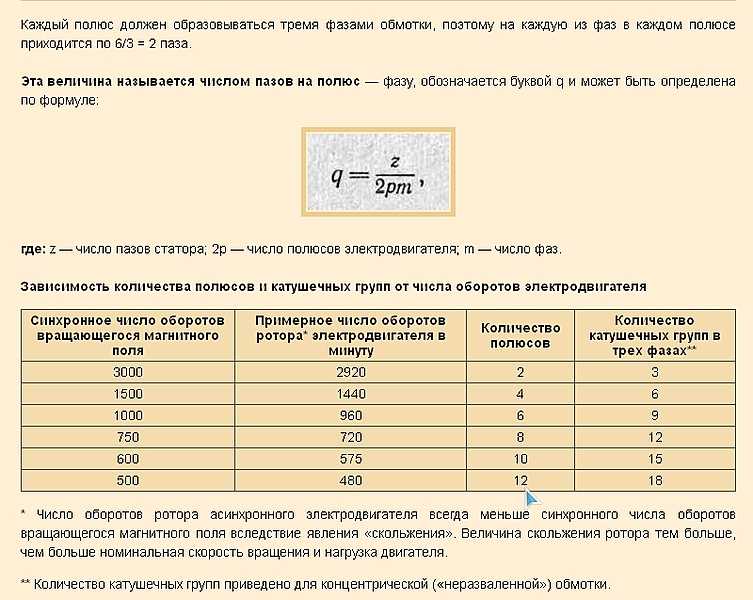 е. обмотки статора, когда она используется вместо постоянных магнитов) и напряжения и тока якоря (то есть обмотка). С конфигурациями, подобными описанной выше (называемой с независимой регулировкой), можно было получить определенные рабочие кривые для каждого типа приложения.
е. обмотки статора, когда она используется вместо постоянных магнитов) и напряжения и тока якоря (то есть обмотка). С конфигурациями, подобными описанной выше (называемой с независимой регулировкой), можно было получить определенные рабочие кривые для каждого типа приложения.
Своевременно регулируя, например, величины напряжения и тока, можно было получить ситуации, в которых крутящий момент был максимальным при пуске с места, а затем уменьшался почти линейно с увеличением скорости. Это были (и до сих пор) типичные требования к накопителям. Однако, помимо практических ситуаций, мы анализируем, каковы преимущества и недостатки, связанные с использованием этого типа двигателя.
Щетки и искры
Конструктивно все двигатели постоянного тока имеют фазный ротор; ясно, что для поддержания постоянного направления вращения необходимо подавать ток якоря так, чтобы создаваемое магнитное поле всегда взаимодействовало в одном и том же направлении с магнитным полем статора; однако, поскольку ротор вращается на собственном валу, магнитное взаимодействие между магнитным полем ротора (подвижное вращающееся) и магнитным полем статора (фиксированное) меняет направление каждые 180°; двигатель постоянного тока, питаемый таким образом, вместо того, чтобы вращаться, фактически будет колебаться между положением 0 ° и положением 180 °. Распространяя рассуждения на каждую долю угла, мы приходим к выводу, что часть обмотки ротора, которая должна питаться в каждой части угла, отличается от части предыдущей доли и от части последующей доли.
Распространяя рассуждения на каждую долю угла, мы приходим к выводу, что часть обмотки ротора, которая должна питаться в каждой части угла, отличается от части предыдущей доли и от части последующей доли.
Таким образом, в двигателях постоянного тока обмотка ротора фактически состоит из многих секций, и каждая из них питается в течение определенной части угла скругления.
Вал ротора двигателей постоянного тока при этом всегда снабжен кольцом, разделенным на продольные сектора, изолированные друг от друга, каждая пара которых действует как контактная клемма для участка обмотки якоря.
Поскольку ротор вращается, источник питания ротора, обеспечиваемый скользящими контактами (щетками), последовательно питает различные секции обмотки ротора, поддерживая постоянное и максимальное взаимодействие между магнитными полями.
Следовательно, двигатели постоянного тока подразумевают несколько переключений цепи во время вращения; мы можем даже утверждать, что чем выше число переключений (т. е. чем больше дробится обмотка ротора), тем больше двигатель обеспечивает постоянный крутящий момент, соответствующий самому высокому, который может быть обеспечен. К сожалению, каждое переключение требует, чтобы щетки разомкнули цепь и немедленно замкнули следующую, а это означает образование искры, которая сама по себе является источником радиоэлектрических помех; такие помехи, зависящие от мощности двигателя и скорости вращения, также могут иметь существенное значение и препятствовать работе других смежных электронных частей или влиять на них. Затем к этому проблемному аспекту присоединяются затраты на простои машин, обусловленные необходимым периодическим техническим обслуживанием из-за износа скользящих контактов.
е. чем больше дробится обмотка ротора), тем больше двигатель обеспечивает постоянный крутящий момент, соответствующий самому высокому, который может быть обеспечен. К сожалению, каждое переключение требует, чтобы щетки разомкнули цепь и немедленно замкнули следующую, а это означает образование искры, которая сама по себе является источником радиоэлектрических помех; такие помехи, зависящие от мощности двигателя и скорости вращения, также могут иметь существенное значение и препятствовать работе других смежных электронных частей или влиять на них. Затем к этому проблемному аспекту присоединяются затраты на простои машин, обусловленные необходимым периодическим техническим обслуживанием из-за износа скользящих контактов.
Переменный ток: без помех
Двигатели переменного тока в подавляющем большинстве случаев не нуждаются в скользящих контактах, поскольку ротор не намотан; в приводах этого типа магнитное поле подвижной части создается за счет индукции непосредственно одной из частей, закрепленной на своего рода «виртуальной» обмотке ротора, существующей благодаря своей конструктивной форме, называемой «беличьей клеткой».
Просто для сведения, в технической литературе эти двигатели называются по-разному, в том числе «асинхронные двигатели», «асинхронные двигатели», «двигатели с короткозамкнутым ротором», а также, естественно, с явными ссылками на белки.
Отсутствие щеток и, как следствие, искрообразования отменяет все требования по техническому обслуживанию, предъявляемые к двигателям постоянного тока, ограничивая вмешательства по сбросу простой заменой изношенных подшипников. Кроме того, будучи конструктивно намного проще, чем двигатели постоянного тока, двигатели переменного тока обеспечивают немаловажное преимущество низких инвестиционных затрат.
С другой стороны, этот тип двигателей сильно страдает от пуска с места, требуя даже в десять раз большего пускового тока, чем номинальный. Если не принять меры, это явление вызывает сильный перегрев, который во многих случаях может быть даже смертельным для двигателя. Двигатели переменного тока, используемые в прикладных ситуациях, когда не происходит частых остановок или замедлений, нуждаются в подходящем охлаждении, дополнительной вентиляции и/или подходящем увеличении размеров.
Они не являются линейными элементами, и это еще более важная характеристика двигателей переменного тока: создаваемый ими крутящий момент не является линейной функцией какой-либо значительной величины (напряжения, тока, скорости вращения и т. д.), а имеет флуктуирующую тенденцию в номинальный рабочий диапазон, с одним пиком при скорости вращения, приближающейся к максимально допустимой. Это означает, что на асинхронные двигатели влияют серьезные проблемы с регулированием скорости вращения, и, кроме простых приложений ВКЛ-ВЫКЛ (например, насос или конвейерная лента), все асинхронные двигатели переменного тока сегодня находят широкое применение в приложениях движения, только если они управляются своевременная электроника (инвертор), способная линеаризовать свою рабочую кривую, т. е. сделать передаваемый крутящий момент постоянным.
Бесколлекторный лучше
Несколько лет назад кому-то пришла в голову идея объединить преимущества двигателей постоянного тока с преимуществами двигателей переменного тока: способность поддерживать максимальный крутящий момент во всем диапазоне скоростей, раскручивание ротора и, следовательно, отсутствие скользящие контакты, возможность запуска и перезапуска без повреждений из-за перегрева, удобная регулировка скорости.
Новый класс двигателей с большим прагматизмом был назван «бесщеточными», то есть «безщеточными», т.е. без скользящих контактов.
Технические и функциональные характеристики этого класса приводов действительно примечательны: почти постоянный крутящий момент во всем диапазоне скоростей, раскрученный ротор, возможность постоянного изменения скорости без заметной потери крутящего момента, возможность частых остановок и перезапусков.
Так как в любом двигателе вращение происходит за счет взаимодействия магнитных полей статора и ротора, то если в бесколлекторных типах ротор не намотан, значит, он должен быть в чем-то магнитным; ротор, по сути, состоит из мощных постоянных магнитов, тогда как в статоре (с питанием) создается вращающееся магнитное поле, которое «тащит» ротор.
Чтобы обеспечить высокий крутящий момент, магнитные поля должны быть очень интенсивными; статор можно сделать соответствующими значениями тока, тогда как для ротора важно качество постоянных магнитов, которые, чтобы соответствовать ситуации, сделаны из специальных материалов. Это объясняет одну из причин более высокой стоимости бесщеточного двигателя по сравнению со стандартным асинхронным двигателем.
Это объясняет одну из причин более высокой стоимости бесщеточного двигателя по сравнению со стандартным асинхронным двигателем.
Для достижения равномерного вращения и всегда максимально возможного крутящего момента внутри бесщеточных двигателей всегда размещается датчик углового положения ротора, который обеспечивает обратную связь с контроллером о том, как генерировать магнитное поле статора.
Такой датчик может быть дискретного типа, т.е. способным распознавать только конечное число угловых положений, или аналоговым, способным предоставлять разную информацию для каждого распознаваемого угла в соответствии с его разрешающей способностью.
Поскольку для дискретного датчика ничего не меняется во всей угловой части, заключенной между двумя различимыми положениями, этот тип бесщеточного двигателя питается от постоянного тока; вместо этого двигатели, оснащенные аналоговыми датчиками, питаются синусоидальным переменным током, где изменение углового положения соответствует эквивалентному изменению напряжения питания.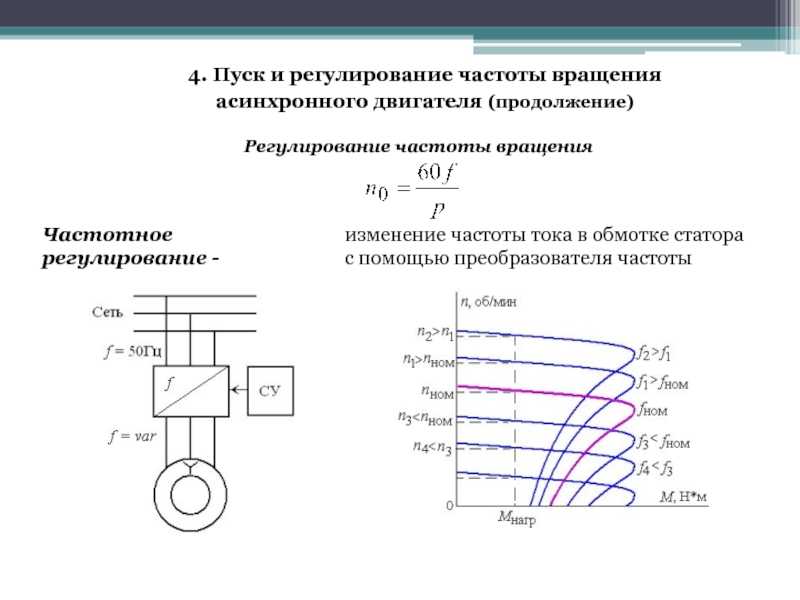
Очевидно, что более высокое разрешение обеспечивает лучшую однородность подачи крутящего момента.
Энергоэффективность
Двигатель представляет собой объект, состоящий из двух частей: статора, который точно «стоит», заодно с фиксирующей поверхностью, и ротора, который именно «вращается» внутри статора.
Всем ясно, что ускорить или замедлить предмет значит победить его инерцию; тогда так же ясно, что инерция зависит от массы (для подтверждения достаточно попробовать толкнуть сначала велосипед, а потом грузовик). Ну а в двигателях с ненамотанным ротором масса ротора ограничена и то с малой инерцией. Все это приводит к значительной экономии энергии, поскольку вся подводимая энергия используется для создания крутящего момента, а не для преодоления механической инерции, как это происходит в двигателях постоянного тока. Не только: низкая инерция означает также высокую динамику, то есть производительность при быстром изменении скорости, что в современных промышленных машинах невозможно.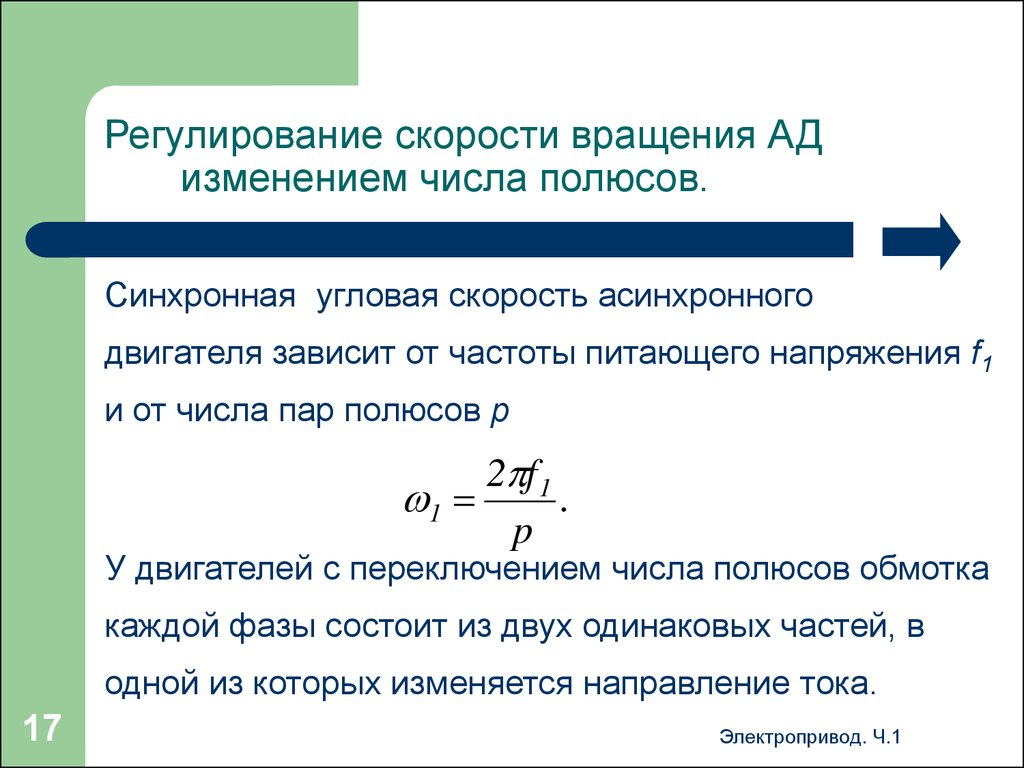
Первыми в рейтинге энергоэффективности являются двигатели переменного тока с ненамотанным ротором, то есть асинхронные и бесщеточные. Однако, если на карту поставлена плотность энергии, то настоящие победители — бесколлекторные, поскольку в силу наиболее эффективного взаимодействия магнитных полей, при той же мощности, что и асинхронные конкуренты, они имеют гораздо меньшие физические размеры; это почти так же неизбежно для передовых промышленных машин.
Последние, но не по этой причине незначительные, двигатели постоянного тока, которые, даже если они потребляют энергию, обеспечивают высокую производительность в таких критических областях, как привод и подъем. (Альберто Пивари)
В чем разница между двигателем переменного и постоянного тока?
Электромеханическая машина, преобразующая электрическую энергию в механическую, называется электродвигателем. Это устройства, создающие вращательную силу, которая обрабатывается оперативной автоматикой.
Работа электродвигателя в основном зависит от взаимодействия магнитных и электрических полей. Обычно в электродвигателях используются такие детали, как центральный вал двигателя, обмотки, подшипники (для уменьшения трения и износа), якорь (расположенный на роторе, вращающейся части или статоре, неподвижной части), щетки (в двигателях постоянного тока). , Клеммы, Рама и торцевые щиты.
Электродвигатели в основном делятся на два типа.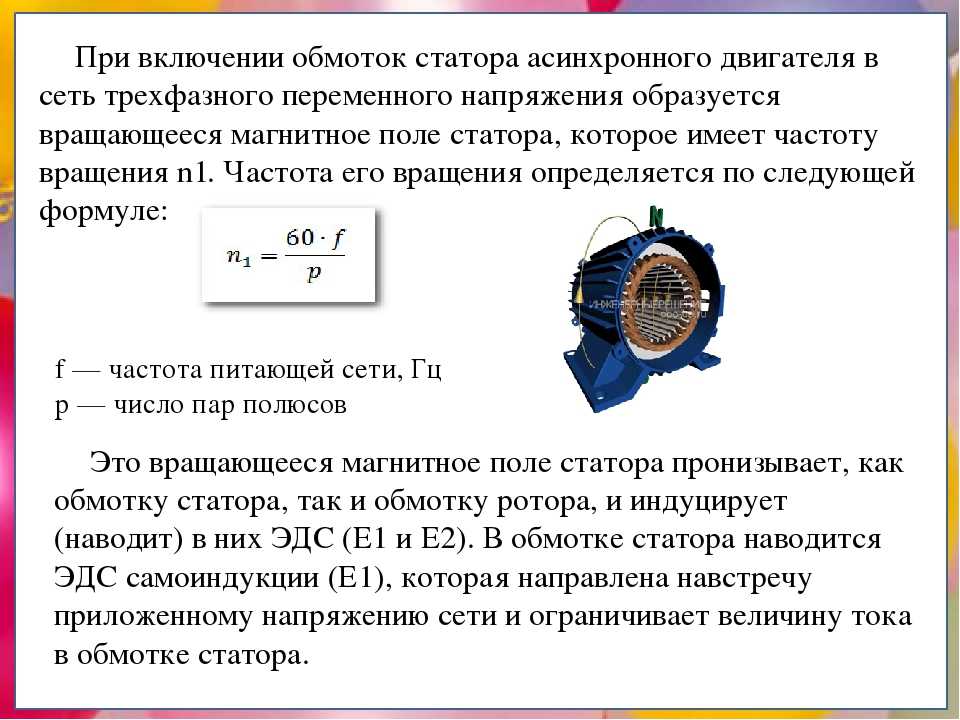 Это двигатель переменного тока и двигатель постоянного тока. Двигатель переменного тока потребляет переменный ток в качестве входа, тогда как двигатель постоянного тока потребляет постоянный ток.
Это двигатель переменного тока и двигатель постоянного тока. Двигатель переменного тока потребляет переменный ток в качестве входа, тогда как двигатель постоянного тока потребляет постоянный ток.
Двигатель переменного тока и его механизм
В двигателе переменного тока снаружи расположено кольцо электромагнитов (составляющее статор).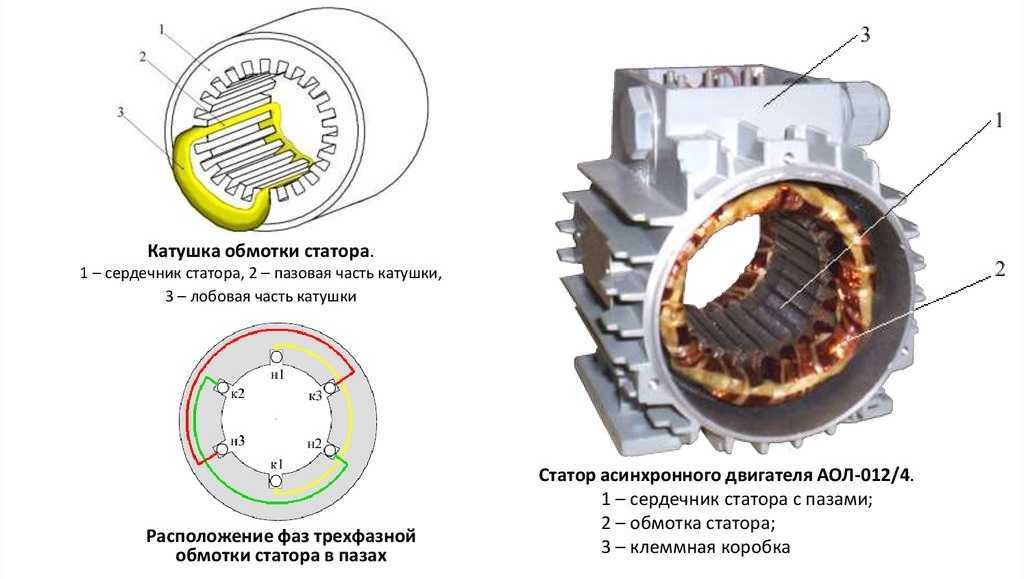 Который может быть разработан для обеспечения вращающегося магнитного поля. Внутри статора есть ось из цельного металла, петля из проволоки, катушка, беличья клетка из металлических стержней и межсоединения. Есть также некоторые другие свободно вращающиеся металлические детали, которые могут проводить электричество.
Который может быть разработан для обеспечения вращающегося магнитного поля. Внутри статора есть ось из цельного металла, петля из проволоки, катушка, беличья клетка из металлических стержней и межсоединения. Есть также некоторые другие свободно вращающиеся металлические детали, которые могут проводить электричество.
Ротор, подвешенный внутри магнитного поля, работает как электрический проводник.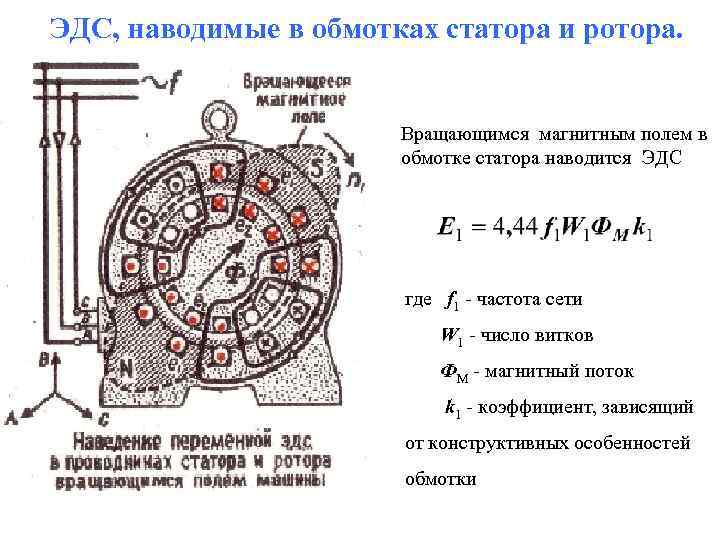 Из-за своего вращения магнитное поле постоянно меняется. Согласно закону электромагнетизма Фарадея, магнитное поле создает (или индуцирует) электрический ток внутри ротора. Если проводник представляет собой кольцо или проволоку, ток течет по нему по петле. Если проводник представляет собой просто цельный кусок металла, вокруг него закручиваются вихревые токи.
Из-за своего вращения магнитное поле постоянно меняется. Согласно закону электромагнетизма Фарадея, магнитное поле создает (или индуцирует) электрический ток внутри ротора. Если проводник представляет собой кольцо или проволоку, ток течет по нему по петле. Если проводник представляет собой просто цельный кусок металла, вокруг него закручиваются вихревые токи.
В любом случае, индуцированный ток создает собственное магнитное поле и, в соответствии с другим законом электромагнетизма (законом Ленца), пытается остановить то, что вызывает вращающееся магнитное поле, — тоже вращаясь. Двигатели переменного тока предлагают относительно эффективный метод производства механической энергии из простого электрического входного сигнала.
Двигатели переменного тока предлагают относительно эффективный метод производства механической энергии из простого электрического входного сигнала.
Двигатель постоянного тока и его механизм
Эти двигатели основаны на куске проволоки, согнутой в прямоугольную петлю. Эта петля подвешена между полюсами магнита. При подключении провода и подключении его к батарее через него протекает постоянный ток (DC), и, таким образом, вокруг него создается временное магнитное поле. Это временное поле отталкивает первоначальное поле от постоянного магнита, в результате чего провод переворачивается.
Эта петля подвешена между полюсами магнита. При подключении провода и подключении его к батарее через него протекает постоянный ток (DC), и, таким образом, вокруг него создается временное магнитное поле. Это временное поле отталкивает первоначальное поле от постоянного магнита, в результате чего провод переворачивается.
Обычно провод останавливается в этой точке, а затем снова переворачивается. Но если используется оригинальное вращающееся соединение (которое называется коммутатором), ток можно менять на противоположное каждый раз, когда провод переворачивается. Это означает, что провод будет продолжать вращаться в одном и том же направлении до тех пор, пока по нему течет ток. Суть этого простого электродвигателя постоянного тока была придумана в 1820-х годах Майклом Фарадеем и примерно десять лет спустя превратилась в практическое изобретение Уильяма Стерджена.
Но если используется оригинальное вращающееся соединение (которое называется коммутатором), ток можно менять на противоположное каждый раз, когда провод переворачивается. Это означает, что провод будет продолжать вращаться в одном и том же направлении до тех пор, пока по нему течет ток. Суть этого простого электродвигателя постоянного тока была придумана в 1820-х годах Майклом Фарадеем и примерно десять лет спустя превратилась в практическое изобретение Уильяма Стерджена.
Разница между двигателем переменного и постоянного тока
Без основного различия, то есть вход переменного и постоянного тока, двигатели переменного и постоянного тока имеют несколько других отличий.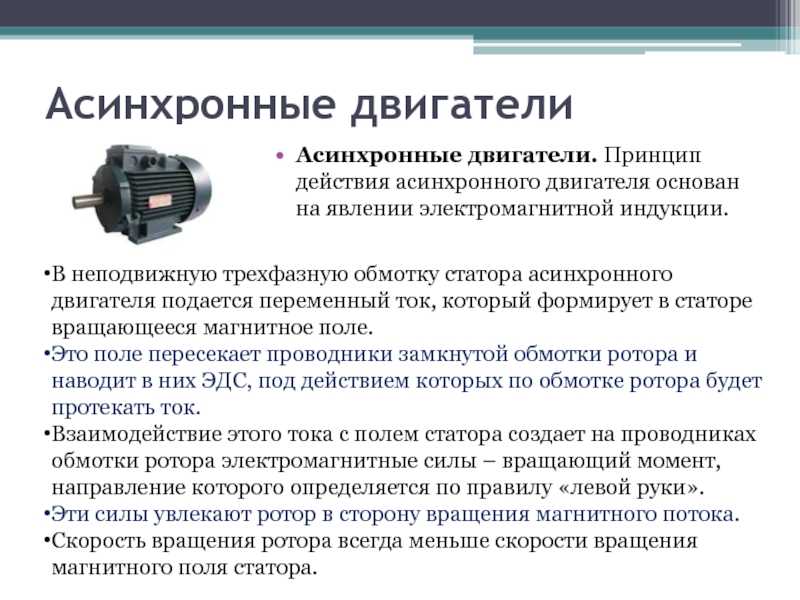
Двигатели переменного тока не требуют преобразования тока.
| В двигателях постоянного тока ток преобразуется из альтернативного (переменного) в постоянный (постоянный) выходной сигнал. |
| Двигатели переменного тока доступны в двухфазном, однофазном или трехфазном исполнении. |
| Все двигатели постоянного тока однофазные. |
| В двигателях переменного тока якоря не вращаются при непрерывном вращении магнитных полей. |
| В двигателях постоянного тока якорь вращается при вращении магнитного поля. |
| Ремонт недорогой. |
| Ремонт довольно дорогой |
Имеют более длительный срок службы. |
| Имеют более короткий срок службы. |
| Для запуска двигателей переменного тока требуется эффективное пусковое оборудование, такое как конденсатор. |
| Двигатели постоянного тока не требуют внешней помощи для запуска. |
| Имеют три входных клеммы. |
| Имеют две входные клеммы. |
| Двигатели переменного тока поздно реагируют на изменение нагрузки. |
| Двигатели постоянного тока быстро реагируют на изменение нагрузки. |
Двигатели переменного тока применяются в случаях, когда требуется высокая скорость и переменный крутящий момент. |