1.7. Динамические нагрузки электропривода
Правые части
уравнений движения электропривода
представляют собой моменты действующих
в системе сил инерции, В отличие от
рассмотренных выше моментов статической
нагрузки электропривода, которые
являются внешними воздействиями и
не зависят от ускорений масс системы,
силы и моменты сил инерции пропорциональны
ускорениям масс:
Такие силы и
моменты в теории электропривода принято
называть динамическимисилами и
моментами. Уравнение движения
приведенного жесткого механического
звена определяет суммарнуюдинамическую
нагрузкуэлектропривода
которая при
принятом правиле знаков численно равна
результирующему моменту М —Мс,
приложенному к движущимся массам.
Динамический
момент является важной составляющей
полной нагрузки электропривода. Он
представляет собой алгебраическую
величину, знак которой при ускорении
системы совпадает со знаком скорости,
а при замедлении противоположен знаку
скорости. При ускорении системы
При ускорении системы
динамический момент является тормозным,
и двигатель, преодолевая этот момент,
совершает работу, затрачиваемую на
увеличение запаса кинетической
энергии системы. При замедлении системы,
напротив, динамический момент является
движущим. Освобождающаяся при снижении
скорости кинетическая энергия расходуется
на совершение работы по преодолению
результирующего момента
М — Мc,который в этом случае является тормозным.
Как правило, для
конкретных производственных механизмов
бывает задано требуемое время пуска
или расчетное ускорение тр.
Наибольший возможный статический и
наибольший требуемый динамический
моменты определяют максимум полной
нагрузки и соответственно наибольшее
значение электромагнитного момента
двигателя, которое он должен создавать
в процессе работы электропривода:
Значения Мmахопределяют кратковременные перегрузки
двигателя, которые не должны превышать
допустимой перегрузочной способности
двигателя.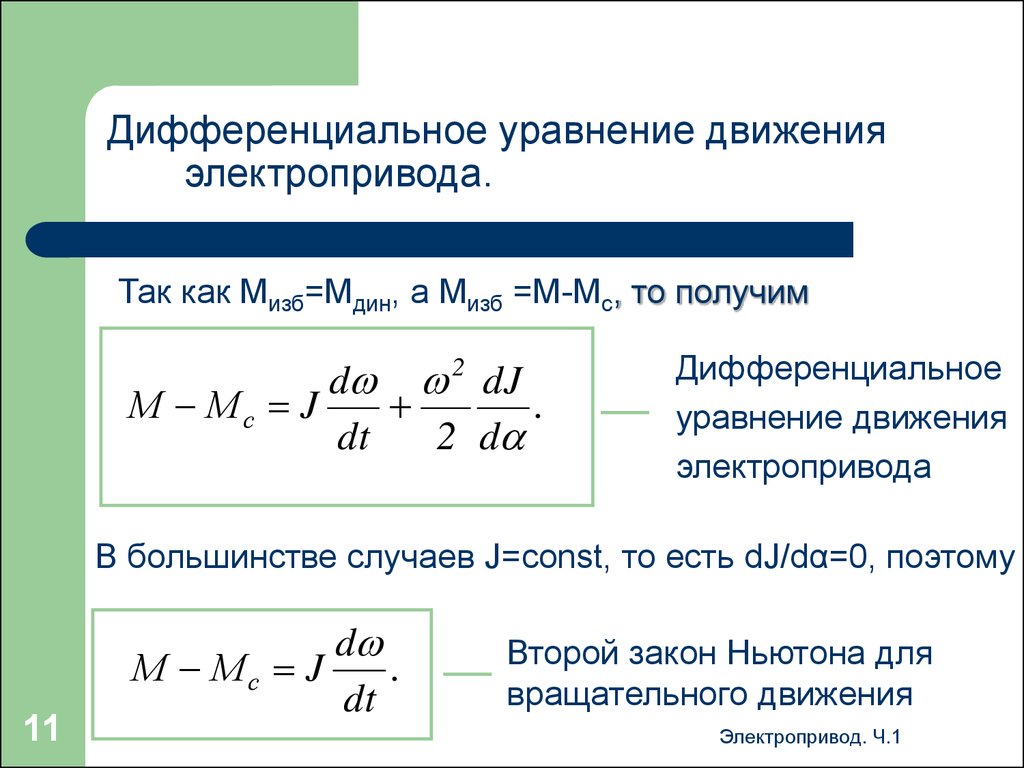
Результирующий
момент М — Мc (1.68) при пуске частично
затрачивается на ускорение ротора
двигателя и связанных с его валом
элементов, а в остальной части через
передачи воздействует на массы
механизма, вызывая их ускорение и
совершая работу по увеличению запасенной
в них кинетической энергии. Следовательно,
динамическая нагрузка при пуске
увеличивает полную нагрузку передач
на значение динамического момента
механизма J2·ср
(см. рис. 1.9):
При J2>>J1это увеличение может быть значительным,
а приJ2 < J1основной нагрузкой передач является
статическая нагрузка. Во всех случаях
динамические нагрузки передач и
элементов кинематической цепи механизма
могут существенно дополнительно
увеличиваться при возникновении в
системе упругих механических колебаний.
Правильное
определение нагрузок передач и других
элементов кинематической цепи
механизма имеет важное практическое
значение Нагрузки механического
оборудования определяют его износ,
причем наиболее неблагоприятно влияние
нагрузок, содержащих знакопеременную
составляющую. Поэтому ограничение
Поэтому ограничение
максимальных нагрузок и уменьшение
динамических колебательных нагрузок,
обусловленных упругими связями,
обеспечивают повышение надежности и
долговечности механической части
привода и механизма.
Динамические
нагрузки механического оборудования
в реальных установках в значительной
мере возрастают из-за ударов, возникающих
при выборе зазоров в передачах и
сочленениях рабочего оборудования
машин. С учетом кинематических зазоров
расчетная двух массовая схема механической
части принимает вид, показанный на рис.
1.25, а. В связи с наличием зазора 3
зависимость М12=f(1-2)
становится нелинейной и имеет вид,
показанный на рис. 1.25,б. Уравнения
движения для этой системы на основании
(1.40) запишутся при р=d/dt так:
Структурная схема
механической части, соответствующая
(1.71), представлена на рис. 1.25, в. Рассматривая
(1.71) и
Рис. 1.25. К
1.25. К
анализу динамических нагрузок
механической части с учетом зазоров в
передачах
рис.
1.25,в,можно установить, что при
разомкнутом зазоре массы системы
движутся независимо. Так как при этомприпринимает вид
Как следствие, к
моменту соударения масс скорости 1и2могут оказаться существенно разными.
Так, при реактивном Мс2на первом этапе пуска (М12
= 0)скорость2остается равной нулю, а скорость1
быстро увеличивается, так какмоменту окончания выбора зазоров она
успевает нарасти до значения
где
—ускорение при выборе зазоров.
Уравнение
(1.74)записано для наиболее тяжелого
случая выбора полного зазора, когда
начальное значениена рис. 1.25,бсоответствует
точке 1,а заканчивается
выбор зазора в точке 2.
При реактивном
характере момента Мс2после выбора
зазора скорость2будет оставаться равной нулю до тех
пор, пока момент М12, возрастая,
не превысит значенияМс2.
За время нарастания моментаМ12до М,с2скорость1дополнительно увеличивается до
значения1начкоторое в конечном счете и определит
динамическую нагрузку передач после
трогания второй массы.
Из физических
соображений можно заключить, что
накопленная за время выбора зазора
первой массой кинетическая энергия
должна при ударе реализоваться в
дополнительных динамических нагрузках
передач. Для количественного анализа
получим зависимостьдля третьего этапа процесса, когда.
На третьем этапе
уравнения (1.71)можно
представить в виде
Для получения
дифференциального уравнения системы,
решенного относительно М12,умножим первое уравнение наа второе на и произведем вычитание второго из
первого. При этом с учетом третьего
При этом с учетом третьего
уравнения правая часть становится
равной,и после преобразований полученное
уравнение можно записать так:
где
С учетом проведенного
анализа предыдущих этапов выбора
зазоров решение (1.76)следует искать при следующих начальных
условиях:
при
Общее решение
уравнения с учетом определяемого правой
частью частного решения и корней
запишем в виде
Для определения
коэффициентов А’и В’ используем
начальные условия:
Следовательно,
где
.
После преобразований
получим
где
В соответствии с
(1.79)максимум нагрузки передач в
рассматриваемом переходном процессе
определяется соотношением
Анализируя
(1. 80),можно установить, что динамические
80),можно установить, что динамические
нагрузки, обусловленные упругими
колебаниями, существенно увеличивают
нагрузки передач. При отсутствии
колебательной составляющей в
(1.79)момент нагрузки передач в
процессе пуска равенЗа счет упругих колебаний в соответствии
с (1.80)нагрузка возрастает,
и ее превышение над средней нагрузкой
называетсядинамическим коэффициентом:
При пуске с
предварительно выбранными зазорами и
динамический
коэффициентт.
е. упругие колебания вдвое увеличивают
рабочие нагрузки ‘передач (рис.
1.26).При наличии зазоровмаксимум
нагрузок возрастает и может достигать
опасных для механической прочности
передач значений. Если подставить в
(1.81) выражениеи
обозначить, как выше принятокоэффициент
динамичности можно записать так:
Нетрудно видеть,
что динамические коэффициенты,
обусловленные упругими ударами, при
выборе зазоров тем больше, чем больше
момент инерции ротора двигателя и
жестко с ним связанных элементов
^^и чем больше
жесткость механической связи.
При
упругость
передач является фактором, снижающим
динамические ударные нагрузки. В этом
можно убедиться, подставив в
(1.82)значение,ему
соответствуют бесконечно большие
динамические коэффициенты, т. е.
разрушающие нагрузки передач. Однако
и при реальных конечных значенияхс12 удары при
выборе зазоров могут создавать
недопустимые нагрузки или существенно
увеличивать износ механического
оборудования. В этих случаях при
проектировании электропривода
предусматриваются законы управления,
обеспечивающие повышение плавности
выбора зазоров и снижение ударных
нагрузок до допустимых значений путем
ограничения достигаемой при выборе
зазоров скорости
Динамические
колебательные процессы в среднем
не влияют на длительность переходных
процессов пуска, реверса и торможения
электропривода. Однако они во многих
случаях отрицательно сказываются
на условиях выполнения технологических
операций, особенно на точности работы
установки.
Практически всегда
возникающие упругие колебания увеличивают
динамические нагрузки механического
оборудования и ускоряют его износ,
т. е. являются одним из факторов,
определяющих надежность, долговечность
и производительность машин.
Динамический
коэффициент является важной
характеристикой условий работы
механического оборудования, а его
значения определяются, главным
образом, динамическими свойствами
электропривода. При проектировании и
наладке электроприводов задача
уменьшения динамического коэффициента
до значений, близких единице, в связи
с изложенным имеет важное практическое
значение. Для многих механизмов она
определяет выбор структуры, настроек
и параметров электропривода и при
успешном решении обеспечивает увеличение
срока службы механического оборудования.
Учебно-методическое пособие к курсовому проектированию, страница 14
, (4. 23)
23)
где
m – масса поступательно движущихся частей механизма, кг;
ρ – радиус приведения.
Если
же известен маховой момент GD², то момент инерции можно рассчитать по следующей
формуле;
. (4.24)
Суммарный
момент инерции электропривода определяется следующим образом:
, (4.25)
где
δ=1,15÷1,3 – коэффициент, учитывающий момент инерции
вращающихся масс передаточного механизма;
Jдв – момент инерции ротора двигателя;
Jмуф – момент инерции соединительной муфты, тормоза и
других частей механизма, непосредственно связанных с валом двигателя;
Jм – момент инерции вращающихся частей механизма;
j – передаточное число редуктора;
m – масса поступательно движущихся частей механизма,
кг;
ρ – радиус приведения.
5.
РАСЧЕТ И ПОСТРОЕНИЕ УПРОЩЕННОЙ
НАГРУЗОЧНОЙ ДИАГРАММЫ ЭЛЕКТРОПРИВОДА
Нагрузочная
диаграмма электропривода представляет собой зависимость электромагнитного
момента М, тока I или мощности Р от времени. В тех случаях, когда момент и ток
В тех случаях, когда момент и ток
связаны линейной (или примерно линейной) зависимостью, обычно нагрузочную
диаграмму строят для момента, который определяют из основного уравнения
движения электропривода:
, (5.1)
где
Мс – статический момент на валу двигателя;
Мдин – динамический момент
электропривода;
JΣ – суммарный момент инерции электропривода,
определяемый по (3.),кг·м².
Динамический
момент электропривода Мдин определяют предварительно
приближенно, принимая линейным закон изменения скорости, т.е.
, (5.2)
где
ωуст – установившаяся скорость двигателя на данном участке
скоростной диаграммы, рад/с;
tп.т. – время пуска
(торможения), с;
εдоп – допустимое угловое
ускорение (замедление), рад/с
Допустимое
угловое ускорение εдоп связано с допустимым
линейным ускорением αдоп соотношением
, (5.3)
где
ρ – радиус приведения, м.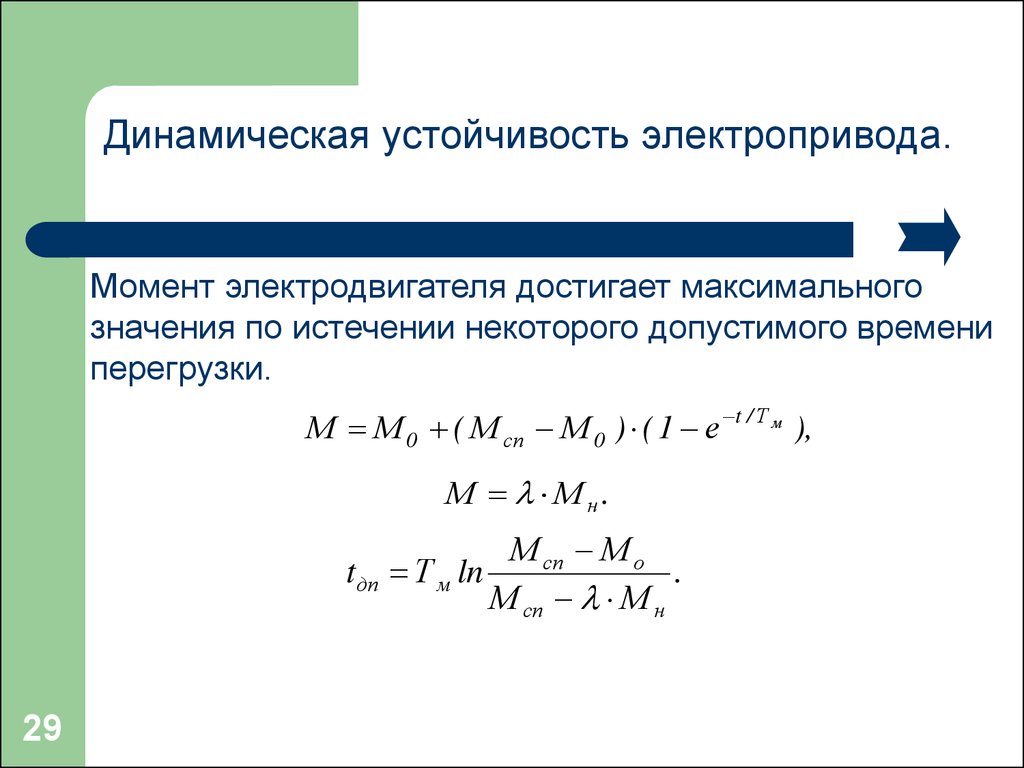
Время
разгона (торможения) tп.т. можно определить из
следующего соотношения
.
(5.4)
На
каждом интервале нагрузочной диаграммы момент двигателя рассчитывается по
формуле
. (5.5)
В
соответствии с формулой (5.5) рассчитывается и строится упрощенная нагрузочная
диаграмма электропривода (рис. 5.1).
Упрощенная
нагрузочная диаграмма используется для предварительной проверки двигателя по
нагреву, пусковой и перегрузочной способностям.
Для
проверки двигателя по нагреву используется несколько методов: метод средних
потерь и методы эквивалентных величин (тока, момента и мощности).
Наиболее
точным является метод средних потерь. Сущность этого метода заключается в
нахождении средних потерь двигателя ΔРср при
заданном графике нагрузки и сравнении с найденных таким образом средних потерь
с номинальными потерями, на которые рассчитан двигатель при длительной работе.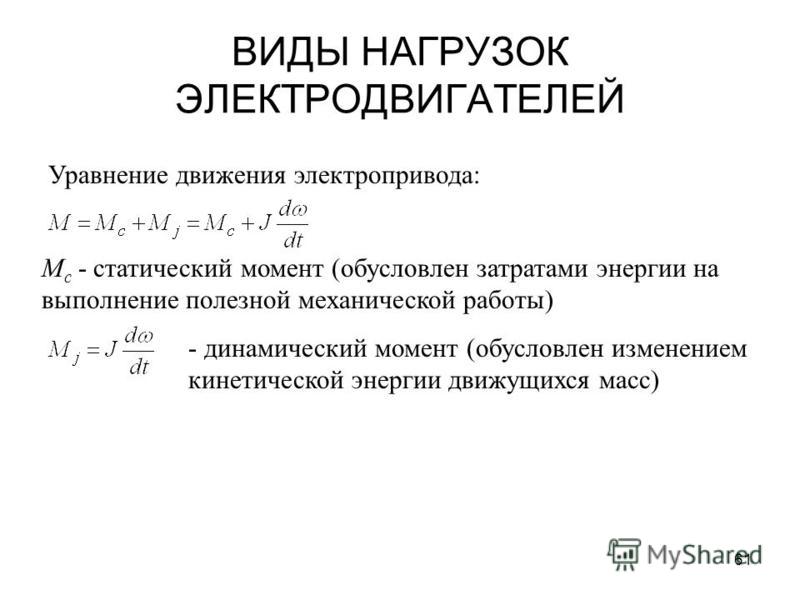
В методе средних потерь предполагается, что при равенстве потерь ΔРср= ΔРном двигатель будет работать с
допустимой для него температурой.
Таким
образом, условием правильного выбора двигателя по нагреву будет следующее
выражение:
ΔРср≤ΔРном. (5.6)
Средние
потери мощности вычисляются следующим образом:
, (5.7)
где
ΔРi – потери мощности на i-ом интервале нагрузочной
диаграммы;
ti – продолжительность i-го интервала.
На
интервалах с установившейся скоростью потери мощности можно рассчитывать по
формуле
, (5.8)
где
Рi – мощность на i-ом интервале нагрузочной диаграммы,
определяемая как
, (5.9)
где
Мi – момент на i-ом интервале нагрузочной диаграммы;
ωi – угловая
скорость двигателя на i-ом интервале;
ηi – КПД двигателя
на i-ом интервале при частичной загрузке
, (5. 10)
10)
где
α – коэффициент постоянных потерь
; (5.11)
кз – коэффициент загрузки
. (5.12)
Основные уравнения крутящего момента электрических приводов
Давайте узнаем об основных уравнениях крутящего момента электрических приводов.
Итак, когда двигатель запускается, нагрузка, подключенная к нему, может быть вращательной или может совершать поступательное движение. Следовательно, скорость нагрузки отличается от скорости двигателя. Приведенные ниже уравнения показывают эквивалентную систему вращения. Давайте представим из нее уравнение крутящего момента системы нагрузки двигателя.
Здесь
Дж = полярный момент инерции системы двигатель-нагрузка относительно вала двигателя, кг-м2.
ωm = Мгновенная угловая скорость вала двигателя, рад/сек.
T = Мгновенное значение развиваемого крутящего момента двигателя, Н-м.
T1 = Мгновенное значение момента нагрузки (сопротивления) относительно вала двигателя, Н-м.
Из фундаментальных уравнений крутящего момента электрических приводов вышеприведенный рисунок (2.1) можно записать как:
Обратите внимание, что уравнение (2.1) применимо к приводам с переменной инерцией, таким как шахтные подъемные машины, приводы барабанов, промышленные роботы.
Для приводов с постоянной инерцией (dJ/dt) = 0. Следовательно,
В уравнении (2.2) крутящий момент нагрузки T 1 и динамический крутящий момент J(dω м /dt) будут уравновешивать крутящий момент двигателя.
Привод ускоряется или замедляется в зависимости от того, больше или меньше T T 1 . Во время разгона двигатель должен обеспечивать не только момент нагрузки, но и дополнительную составляющую момента J (dω m /dt), чтобы преодолеть инерцию привода.
Читайте также: Что такое электрические приводы? Детали, функции, типы и области применения
В приводах с большой инерцией, таких как электропоезда, крутящий момент двигателя должен значительно превышать крутящий момент нагрузки, чтобы получить адекватное ускорение. В приводах, требующих быстрой переходной реакции, крутящий момент двигателя должен поддерживаться на самом высоком уровне, а уравнение крутящего момента системы нагрузки двигателя должно быть разработано с минимально возможной инерцией.
В приводах, требующих быстрой переходной реакции, крутящий момент двигателя должен поддерживаться на самом высоком уровне, а уравнение крутящего момента системы нагрузки двигателя должно быть разработано с минимально возможной инерцией.
Энергия, связанная с динамическим крутящим моментом J(dω м /dt), хранится в форме кинетической энергии, определяемой выражением (Jω 2 м /2). Во время торможения динамический момент J(dω м /dt) имеет отрицательный знак. Таким образом, он помогает развиваемому двигателю крутящему моменту T и поддерживает движение привода, извлекая энергию из накопленной кинетической энергии.
SourceElectric Drive от GK Dubey
Последние статьи
35+ Трансформер MCQS Вопросы и ответы
Адми будет полезен для ваших конкурсных экзаменов, различных собеседований, виват,…
Более 60 важных вопросов MCQ по передаче и распространению
admin —
Привет, учащиеся, в этой статье мы перечислили более 60 важных вопросов MCQ по передаче и распространению, которые будут полезны для ваших конкурсных экзаменов, различных. ..
Более 60 важных MCQ по двигателю постоянного тока
admin —
Привет, учащиеся, в этой статье мы перечислили более 60 важных MCQ по двигателю постоянного тока, которые будут полезны для ваших конкурсных экзаменов, различных собеседований. ,…
Только 60 MCQ по 3-фазному асинхронному двигателю (полезно)
администратор —
Привет, учащиеся! ваши конкурсные экзамены, различные…
60+ MCQ по генератору постоянного тока [Очень важно]
администратор —
Привет, учащиеся, в этой статье мы перечислили 60+ важных MCQ по генератору постоянного тока, которые быть полезным для ваших конкурсных экзаменов, интервью, виват,.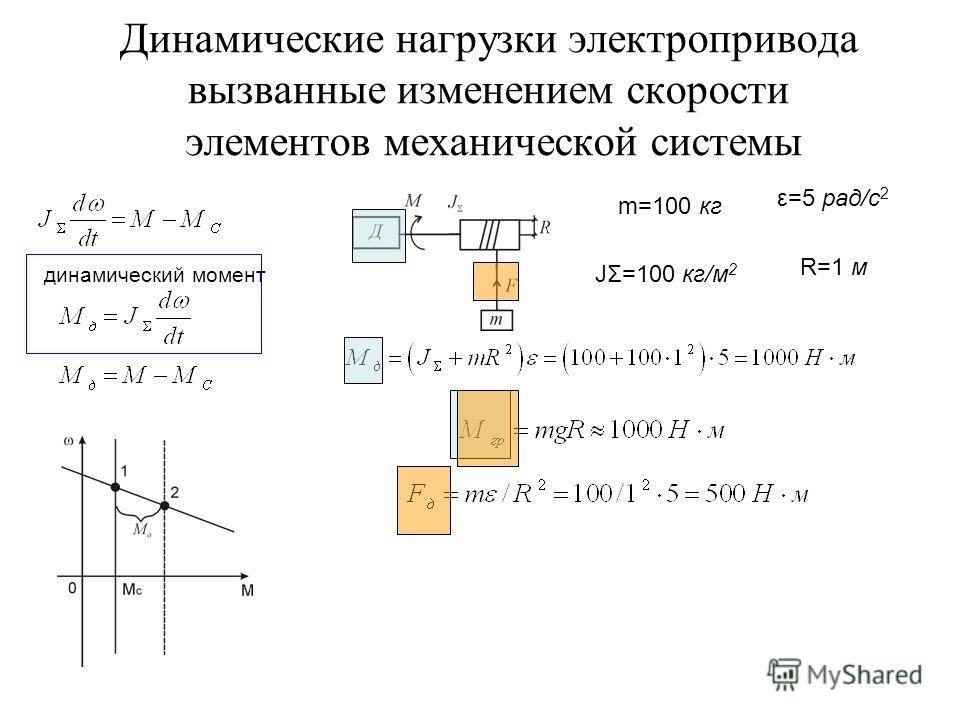 ..
..
Динамика электроприводов | Классификация моментов нагрузки
Классификация моментов нагрузки : Как мы уже знаем, характер классификации моментов нагрузки зависит от конкретного приложения. Низкоскоростная лебедка является примером нагрузки, при которой крутящий момент является постоянным и не зависит от скорости (рис. 2.3). На малых скоростях крутящий момент незначителен. Таким образом, чистый крутящий момент равен …
Компоненты крутящего момента нагрузки: Компоненты крутящего момента нагрузки Tl могут быть далее разделены на следующие компоненты: (i) Момент трения TF : Трение будет присутствовать на валу двигателя, а также в различных частях нагрузки . TF – эквивалентное значение различных моментов трения относительно вала двигателя. (ii) Вращающий момент, Tw : когда …
Четырехквадрантный режим моторного привода : При рассмотрении четырехквадрантного режима моторного привода полезно установить соответствующие соглашения о знаках крутящего момента и скорости.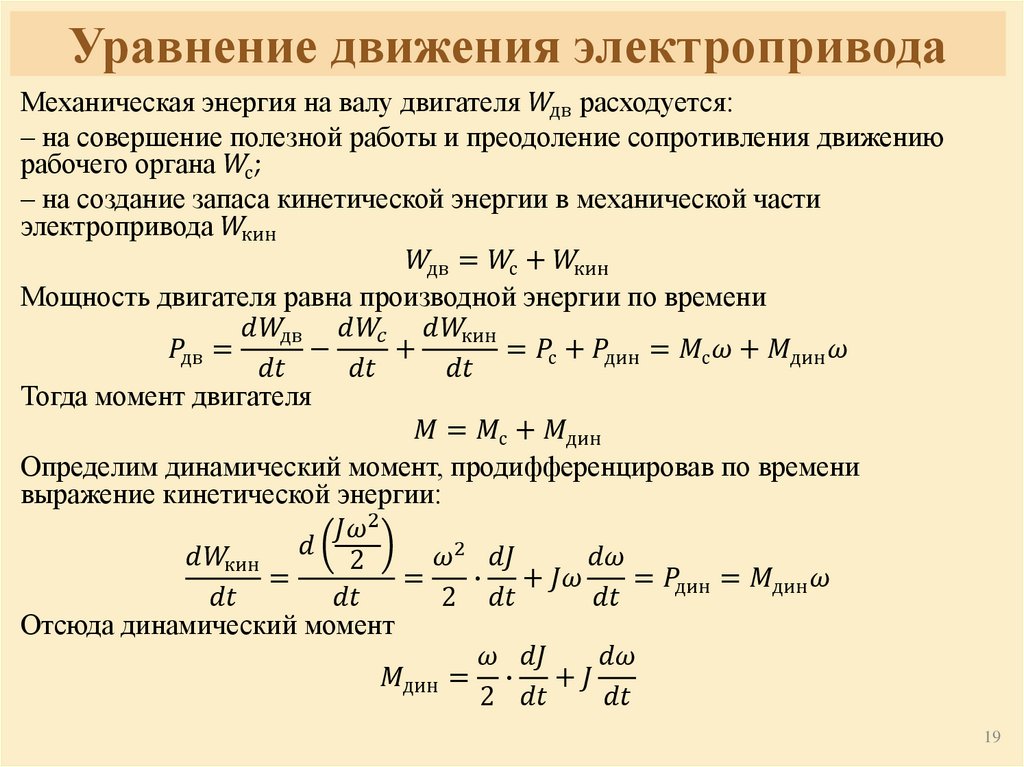 Скорость двигателя считается положительной при вращении в прямом направлении. Для приводов, которые работают только в одном направлении, скорость движения вперед будет …
Скорость двигателя считается положительной при вращении в прямом направлении. Для приводов, которые работают только в одном направлении, скорость движения вперед будет …
Выравнивание нагрузки в электроприводах : Выравнивание нагрузки в электроприводах – В некоторых приводах момент нагрузки сильно колеблется в течение коротких интервалов времени. Например, в прессовальных машинах требуется большой кратковременный крутящий момент во время операции прессования, в противном случае крутящий момент почти равен нулю. Другими примерами являются электрический молоток, …
Конструктивные параметры двигателя : Различные части нагрузки могут быть соединены с помощью различных механизмов, таких как шестерни, клиновые ремни и коленчатый вал. Эти части могут иметь разные скорости и разные типы движений, такие как вращательные и поступательные. В этом разделе представлены методы определения параметров конструкции двигателя для определения эквивалентного момента инерции (Дж) …
Стабильность привода в установившемся режиме : Равновесная скорость системы двигатель-нагрузка достигается, когда крутящий момент двигателя равен крутящему моменту нагрузки.