Униполярный или биполярный шаговый двигатель: какие различия, что лучше?
Новости
Поздравляем с Днем народного единства!
Уважаемые покупатели! Поздравляем с Днем народного единства!
3 ноября — сокращенный рабочий день с 8.00 до 15.30, 4, 5, 6 ноября — выходные дни.
Поздравляем с Днем России!
Уважаемые покупатели, сердечно поздравляем вас с праздником — Днем России! Обращаем ваше внимание, что 13 июня у нас выходной день.
Информация о текущих ценах
Уважаемые покупатели!
В связи с экономической и политической нестабильностью в мире высокий уровень цен по-прежнему сохраняется.
Мы делаем все от нас зависящее, чтобы поддерживать весь необходимый ассортимент и сохранять цены на минимально возможном уровне.
Можем заверить, что снижение цен будет произведено сразу, как только начнется товародвижение на глобальных маршрутах. Читать все новости
Читать все новости
В чем принципиальные различия между биполярным и униполярным шаговым двигателем, какой стоит выбрать?
В данной статье будут рассмотрены два типа двухфазных шаговых двигателя — униполярный и биполярный. Подобные названия появились благодаря тому, что в двухфазных шаговых двигателях встречаются два основных типа обмотки катушек, один — биполярный, другой — униполярный. Далее — рассмотрим оба типа подробнее, чтобы разобраться какой из них является более эффективным.
Униполярный шаговый двигатель
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера. Подобный механизм позволяет в качестве управляющей системы использовать простейший униполярный драйвер с четырьмя ключами.
Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов. Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения.
Биполярные шаговые двигатели
С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-моста.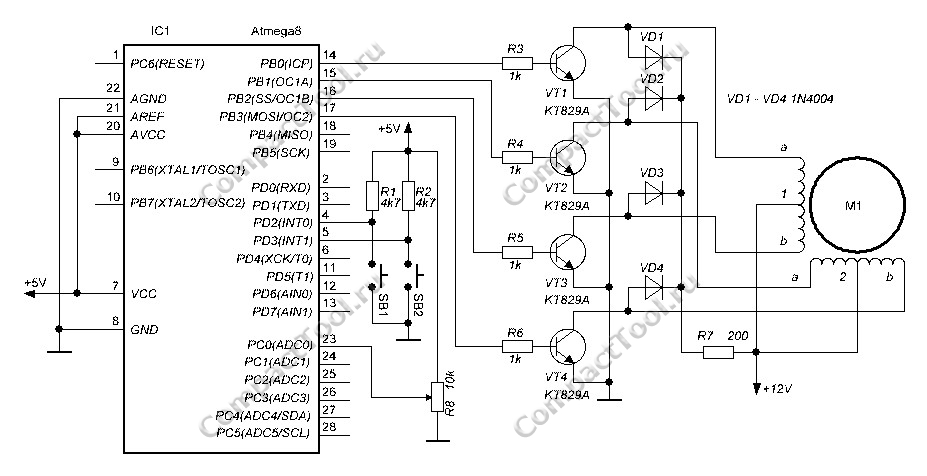
Выводы
Биполярные шаговые двигатели немного сложнее в управлении, но при схожих габаритах, биполярный двигатель способен обеспечить больший момент, в сравнении с униполярным. Однако униполярный двигатель, в противовес биполярному, проще в эксплуатации, и вполне сгодится для привода устройств с небольшой мощностью — бытовая техника (стиральная машина, холодильник), магнитофоны и т.д.
DARXTON
Новости
Поздравляем с Днем народного единства!
Уважаемые покупатели! Поздравляем с Днем народного единства!
3 ноября — сокращенный рабочий день с 8.00 до 15.30, 4, 5, 6 ноября — выходные дни.
Поздравляем с Днем России!
Уважаемые покупатели, сердечно поздравляем вас с праздником — Днем России! Обращаем ваше внимание, что 13 июня у нас выходной день. Читать все новости
Читать все новости
Биполярные и униполярные шаговые двигатели
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля
должна
переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с
двухполярным
питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. а).
Посмотреть технические характеристики и купить шаговые двигатели.
Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это
позволяет
изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При
этом
существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в
Драйвер должен иметь только 4 простых ключа. Таким образом, в
униполярном
двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут
быть объединены
внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. б) . Иногда униполярные
двигатели имеют
раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет
отдельные
выводы, поэтому всего выводов 8 (рис. в). При соответствующем соединении обмоток такой двигатель можно
использовать как
униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в
биполярном
режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не
превысить
максимальной рассеиваемой мощности.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную
мощность. При
При
одних и тех же размерах биполярные двигатели обеспечивают больший момент.
купить шаговый двигатель
купить блок управления шаговым двигателем
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками
статора. Путь
для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при
повышении
тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует
редко.
Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках.
Как раз
этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент
времени
используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает
Другая половина просто занимает место в окне сердечника, что вынуждает
делать
обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е.
их
использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое
сопротивление –
соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает
выигрыш в
моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить
габариты или
просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они
требуют
значительно более простых схем управления обмотками.
Разница между униполярными и биполярными шаговыми двигателями
Униполярный шаговый двигатель работает с одной обмоткой с отводом от середины на фазу. Каждая секция обмотки включается для каждого направления магнитного поля. Каждая обмотка относительно просто выполнена с коммутационной схемой, это сделано потому, что устройство имеет магнитный полюс, который можно поменять местами без переключения направления тока. В большинстве случаев, учитывая фазу, общий центральный отвод для каждой обмотки следующий; три провода на фазу и шесть проводов для обычного двухфазного шагового двигателя.
Каждая секция обмотки включается для каждого направления магнитного поля. Каждая обмотка относительно просто выполнена с коммутационной схемой, это сделано потому, что устройство имеет магнитный полюс, который можно поменять местами без переключения направления тока. В большинстве случаев, учитывая фазу, общий центральный отвод для каждой обмотки следующий; три провода на фазу и шесть проводов для обычного двухфазного шагового двигателя.
Обычно вы видите, что обе эти фазы часто соединяются внутри, поэтому шаговый двигатель имеет только пять выводов. Часто контроллер шагового двигателя используется для активации транзисторов привода в правильном порядке. Поскольку эти шаговые двигатели довольно просты в эксплуатации, они часто очень популярны среди любителей и обычно являются самым дешевым способом получения точных угловых перемещений.
В биполярных шаговых двигателях имеется только одна обмотка на фазу. Схема управления должна быть более сложной, чтобы изменить магнитный полюс, это делается для изменения направления тока в обмотке. Это делается с помощью Н-образного моста, однако есть несколько микросхем драйверов, которые можно приобрести, чтобы упростить эту задачу. В отличие от униполярного шагового двигателя, биполярный шаговый двигатель имеет два вывода на фазу, ни один из которых не является общим. Эффекты статического трения возникают при использовании H-моста с определенной топологией привода, однако его можно уменьшить, сглаживая сигнал шагового двигателя на более высокой частоте.
Это делается с помощью Н-образного моста, однако есть несколько микросхем драйверов, которые можно приобрести, чтобы упростить эту задачу. В отличие от униполярного шагового двигателя, биполярный шаговый двигатель имеет два вывода на фазу, ни один из которых не является общим. Эффекты статического трения возникают при использовании H-моста с определенной топологией привода, однако его можно уменьшить, сглаживая сигнал шагового двигателя на более высокой частоте.
Биполярные двигатели, как правило, лучше, чем однополярные. Они имеют больший крутящий момент и более эффективны.
Однако ими сложнее управлять, поскольку им нужен обратный ток.
Конструктивно биполярные двигатели имеют несколько (не менее двух) независимых обмоток. С каждого конца обмотки выходит провод, так что получается по два провода на обмотку.
Униполярные двигатели также имеют несколько обмоток, однако помимо того, что концы каждой обмотки соединены с проводами, середина также соединена с третьим проводом.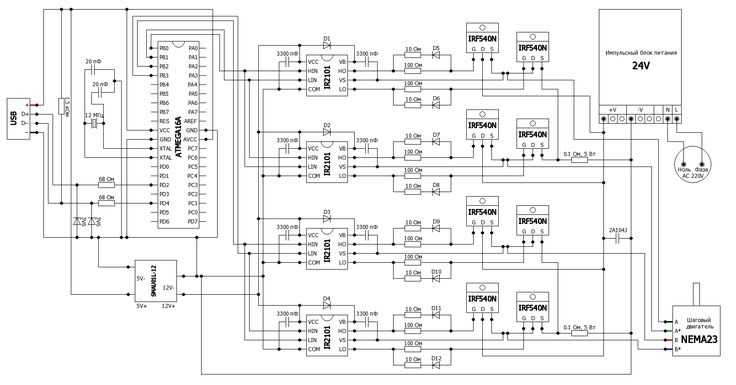
Отсутствие третьего провода означает, что биполярные моторы сделать немного проще.
Когда дело доходит до управления этими двигателями, более простой биполярный двигатель требует более сложного привода. Это потому, что для точного управления его движением нам нужно иметь возможность управлять током в каждой обмотке в обоих направлениях.
С другой стороны, в униполярном двигателе мы можем обойтись током, текущим только в одном направлении. Это означает, что электронику драйвера можно сделать проще. Компромисс заключается в том, что мы используем только половину каждой катушки обмотки в данный момент времени, и это приводит к более низкому крутящему моменту и эффективности.
Однако сегодня, при наличии легкого доступа к драйверам двигателей, таким как Н-образные мосты, можно легко управлять биполярными двигателями переменного тока. Преимущество униполярных двигателей в том, что им не нужен обратный ток, больше не имеет большого значения.
Фотография в заголовке от Dolly1010 — Vlastní fotografie, CC BY 3.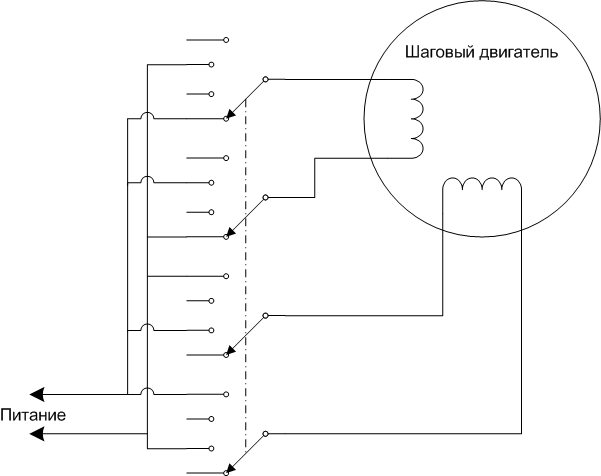 0, https://commons.wikimedia.org/w/index.php?curid=15231952
0, https://commons.wikimedia.org/w/index.php?curid=15231952
С основами покончено? Ищете более сложные темы?
Arduino Step by Step Getting Serious — это наш комплексный курс Arduino для людей, готовых перейти на следующий уровень.
Узнайте о Wi-Fi, BLE и радио, двигателях (серводвигателях, двигателях постоянного тока и шаговых двигателях с различными контроллерами), ЖК-дисплеях, OLED- и TFT-экранах с кнопками и сенсорными интерфейсами, управлении большими нагрузками, такими как реле и источники света, и о многом, НАМНОГО больше.
Узнать больше
Включите JavaScript, чтобы просматривать комментарии с помощью Disqus.
Теги
Биполярный, Разница, Двигатели, популярный, Вопрос, Шаговый двигатель, Униполярный
Вам также может понравиться
Униполярный и биполярный привод для шаговых двигателей, Часть 1: принципы
Шаговые двигатели могут быть сконфигурированы для униполярного или биполярного привода; каждый подход имеет различные атрибуты производительности и компромиссы.
Широко используются шаговые двигатели, и, как и многие основные компоненты, они в некотором смысле просты, но также имеют множество конфигураций и тонкостей работы. Для шаговых двигателей (часть термина из двух слов «двигатель» часто пропускается) существуют две широко используемые конфигурации обмотки и привода: униполярная и биполярная.
Во-первых, примечание о терминологии, поскольку термины «униполярный» или «биполярный» здесь имеют другое значение, чем в большинстве дискуссий о схемах вообще и особенно об аналоговых схемах. Здесь это не относится к шинам питания постоянного тока с шаговым двигателем. В этих случаях «униполярный» означает, что есть положительное напряжение питания и заземление, но нет отрицательного питания, и схема работает исключительно от этого несимметричного источника питания. Напротив, «биполярный» источник питания означает, что источник питания имеет как положительную, так и отрицательную шину. Биполярный или разделенный источник питания необходим, поскольку для таких компонентов, как операционные усилители, может потребоваться двойное питание для обеспечения полного диапазона характеристик в некоторых приложениях. Однако эти широко используемые значения униполярных и биполярных двигателей неприменимы к шаговым двигателям.
Однако эти широко используемые значения униполярных и биполярных двигателей неприменимы к шаговым двигателям.
Шаговый двигатель представляет собой тип бесщеточного двигателя постоянного тока, состоящий из соединенных катушек, называемых «фазами». Ротор двигателя совмещается с катушками за счет силы, создаваемой магнитным потоком статора, который создается током, протекающим в фазах (рисунок 1) .
Рис. 1: Шаговый двигатель использует электронную связь полюсов статора, чтобы тянуть и, таким образом, вращать магниты статора. (Изображение: статья по электротехнике)
Ток привода направляется на следующую фазу для создания постепенного и полностью контролируемого вращения. Последовательность управления этой следующей фазой приводит к вращательным шагам, которые могут составлять частичное, полное или непрерывное вращательное движение, необходимое и даже реверсивное, если это необходимо.
Основные схемы подключения фаз
Конструкция катушек и их схема подключения в целом подразделяются на униполярную и биполярную топологию подключения (рис.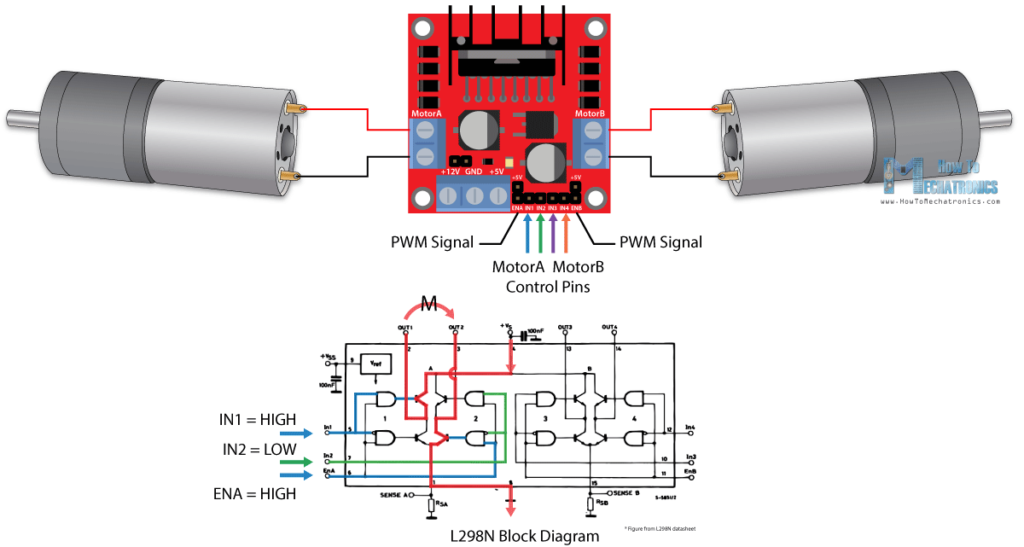 2). Обратите внимание, что как униполярные, так и биполярные конфигурации шаговых двигателей работают от униполярного (одного рельса) источника питания. Обе конфигурации могут управляться для вращения в обоих направлениях от одного источника питания. Униполярные и биполярные конфигурации имеют различия в схемах привода, характеристиках производительности, таких как скорость и крутящий момент, эффективность и стоимость материалов.
2). Обратите внимание, что как униполярные, так и биполярные конфигурации шаговых двигателей работают от униполярного (одного рельса) источника питания. Обе конфигурации могут управляться для вращения в обоих направлениях от одного источника питания. Униполярные и биполярные конфигурации имеют различия в схемах привода, характеристиках производительности, таких как скорость и крутящий момент, эффективность и стоимость материалов.
Рис. 2. Полюса шагового двигателя можно расположить и подключить в биполярной и униполярной конфигурациях, для каждой из которых требуется разное количество электронных переключателей (МОП-транзисторов). (Изображение: Texas Instruments)
Униполярный шаговый двигатель имеет одну обмотку с центральным отводом на фазу. Каждая секция обмотки переключается через коммутационную цепь для управления ориентацией магнитного поля. Таким образом, направление может быть изменено без необходимости переключения направления тока, поэтому изменение направления возможно, несмотря на однополярное питание. Проводка обычно имеет три провода на фазу и шесть проводов для обычного двухфазного шагового двигателя.
Проводка обычно имеет три провода на фазу и шесть проводов для обычного двухфазного шагового двигателя.
Существуют и другие способы соединения обмоток униполярных двигателей, так как соединения отдельных фаз (катушек) могут быть соединены внутри (рис. 3) . Использование таких внутренних соединений уменьшает размер и стоимость проводки разъема (это может показаться тривиальным, но это может быть не так) и упрощает намотку катушки поставщиком, но также уменьшает возможность гибкости конфигурации привода; это может быть проблемой в некоторых случаях.
Рис. 3. Усложняет обсуждение, но предлагает больше вариантов производительности, расположение полюсов униполярного шагового двигателя бывает 4-, 5- и 6-проводным. (Изображение: Технические исследования)
Напротив, биполярный шаговый двигатель имеет только одну обмотку на фазу. Следовательно, схема управления более сложна, чтобы изменить направление тока, протекающего к катушке, и изменить направление магнитного поля. Униполярному двигателю требуется четыре транзистора (МОП-транзистора) для полного управления в полумостовой конфигурации, а биполярному двигателю для управления требуется восемь транзисторов, объединенных в два Н-моста. Однако с современными ИС и устройствами управления мощностью разница, особенно для двигателей меньшей мощности, невелика и может быть незначительной.
Униполярному двигателю требуется четыре транзистора (МОП-транзистора) для полного управления в полумостовой конфигурации, а биполярному двигателю для управления требуется восемь транзисторов, объединенных в два Н-моста. Однако с современными ИС и устройствами управления мощностью разница, особенно для двигателей меньшей мощности, невелика и может быть незначительной.
Основное различие между «униполярными» и «биполярными» шаговыми двигателями заключается в наличии провода центрального отвода, который разделяет полные витки обмотки пополам. Это разделение может быть выполнено одним соединительным проводом на пару или двумя проводами (по одному на соседние концы каждой катушки). При удалении центрального ответвления однополярное соединение становится биполярным последовательным.
[Цвета выводов двигателя в некоторой степени стандартизированы в отрасли и полностью соответствуют линейке продуктов отдельного поставщика, поэтому на многих схемах проводки показаны цвета, а не нумерация выводов.