Устройство электродвигателя постоянного тока
Электрический двигатель – это электрическая машина, предназначенная для преобразования электрической энергии, поступающей от источника тока в механическую энергию. Часть потребляемой электроэнергии расходуется на перемагничивание ферромагнетиков, преодоление электрического сопротивления и силы трения, что сопровождается образованием тепла.
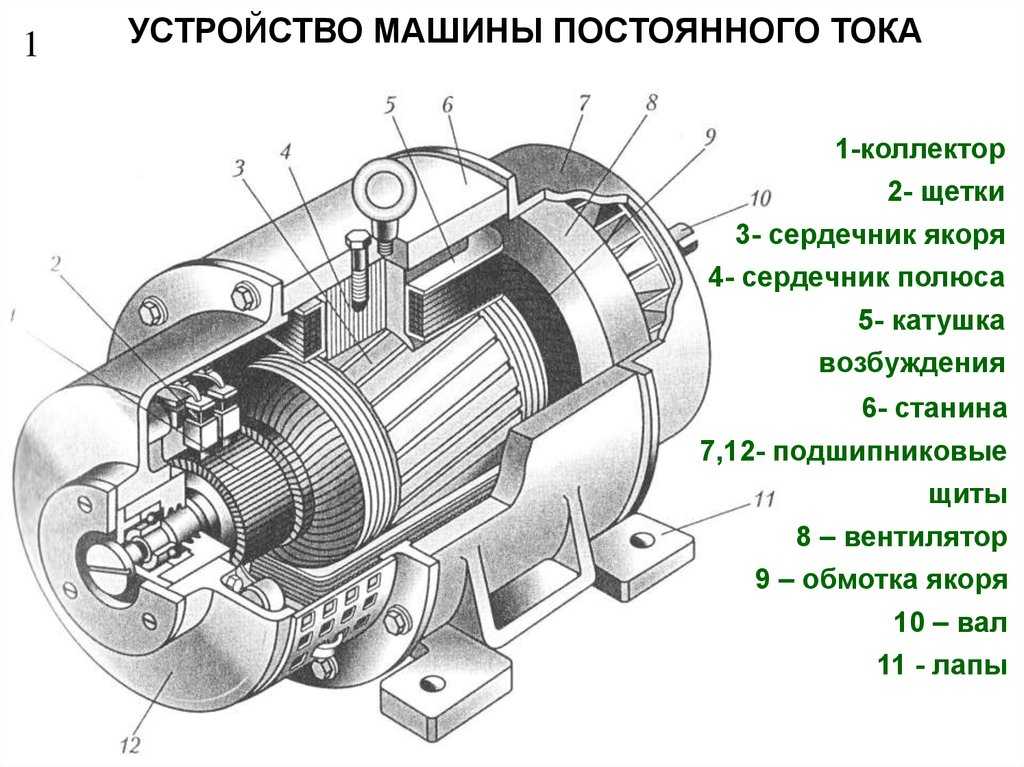
Электродвигатель, работающий от источника постоянного тока, называют двигателем постоянного тока. В зависимости от особенностей конструкции электрические двигатели постоянного тока подразделяются на коллекторные и бесколлекторные. Рассмотрим устройство двигателя постоянного тока на примере изделия коллекторной конструкции. Основные элементы электродвигателя постоянного тока: статор, ротор, коллектор и токопроводящие щетки.
Статор, он же индуктор, – неподвижная часть машины, в большинстве вариантов исполнения – внешняя. Статор состоит из станины и магнитных полюсов. В зависимости от конструкции двигателя на статоре могут устанавливаться постоянные магниты, электромагниты с обмотками возбуждения или короткозамкнутые обмотки. Кроме основных магнитных полюсов на статоре могут устанавливаться дополнительные полюса. Статор необходим для создания магнитного потока в системе.
В зависимости от конструкции двигателя на статоре могут устанавливаться постоянные магниты, электромагниты с обмотками возбуждения или короткозамкнутые обмотки. Кроме основных магнитных полюсов на статоре могут устанавливаться дополнительные полюса. Статор необходим для создания магнитного потока в системе.
Подвижная вращающаяся часть машины, как правило, внутренняя – ротор или якорь. Ротор электродвигателя постоянного тока состоит из многочисленных катушек с токопроводящими обмотками, по которым проходит электрический ток. Количество катушек в конструкции ротора может достигать нескольких десятков. Таким образом частично устраняется неравномерность крутящего момента, уменьшается коммутируемый ток, обеспечивается оптимальное взаимодействие магнитных полей статора и ротора.
Щеточно-коллекторный узел представляет собой связующее звено между ротором и статором. В коллекторе объединены выводы всех катушек ротора. Этот узел служит переключателем тока со скользящими контактами и дополнительно выполняет функции датчика углового положения ротора.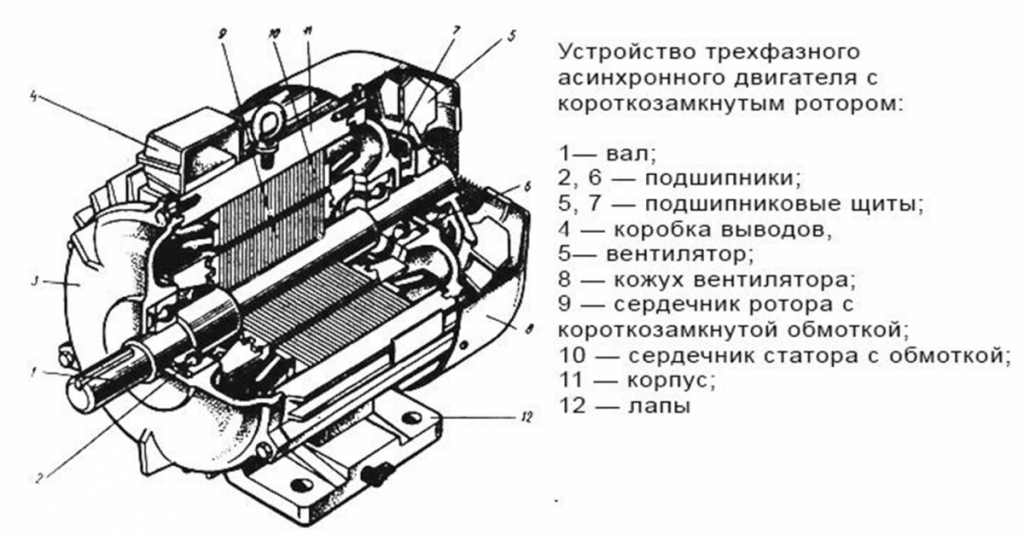
Щетки – неподвижные контакты, подводящие ток к ротору. Чаще всего в двигателях применяются медно-графитовые и графитовые щетки. При вращении ротора происходит замыкание и размыкание контактов коллектора. При этом в обмотках ротора происходят переходные процессы, приводящие к искрению. Искрение и трение при работе двигателя постоянного тока приводят к тому, что щеточно-коллекторный узел является самым уязвимым элементом конструкции. Для уменьшения искрения чаще всего используется установка дополнительных полюсов. Порядка 25% поломок электродвигателей происходит по причине неисправности щеточно-коллекторного узла. В некоторых областях применения электродвигателей постоянного тока поломки по причине износа щеточно-коллекторного узла составляют свыше 60% от общего количества.
При подаче тока на ротор, помещенный в магнитное поле статора, в системе возникает момент силы, под действием которого ротор начинает вращаться. Направление вращения ротора зависит от направления тока. Чтобы ротор вращался в одном и том же направлении, направление тока в нем должно оставаться постоянным. Это условие выполняется с помощью коллекторного узла. Механическая энергия вращения ротора передается другим механизмам посредством присоединенного к ротору шкива и ременной передачи.
Чтобы ротор вращался в одном и том же направлении, направление тока в нем должно оставаться постоянным. Это условие выполняется с помощью коллекторного узла. Механическая энергия вращения ротора передается другим механизмам посредством присоединенного к ротору шкива и ременной передачи.
Асинхронный электродвигатель. Устройство и принцип действия. – www.motors33.ru
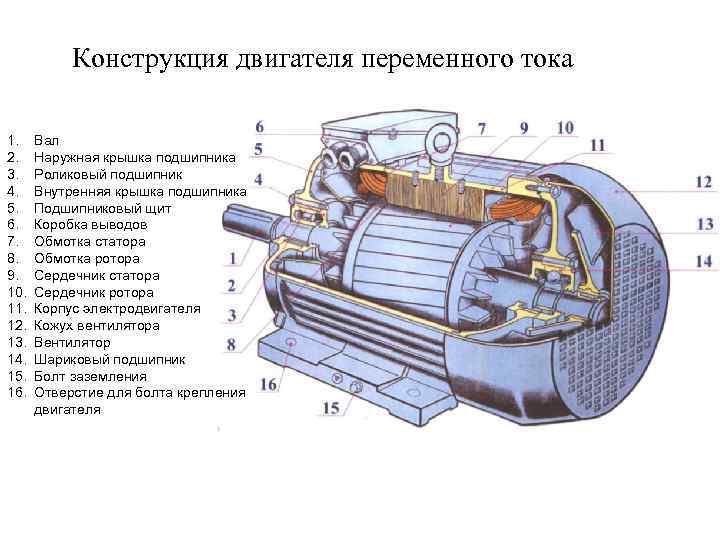
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами.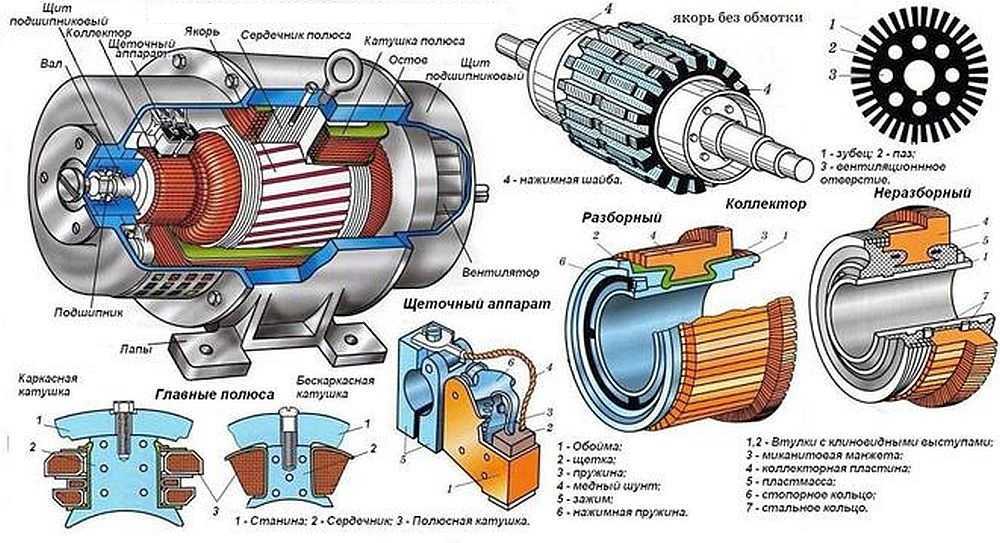 Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е.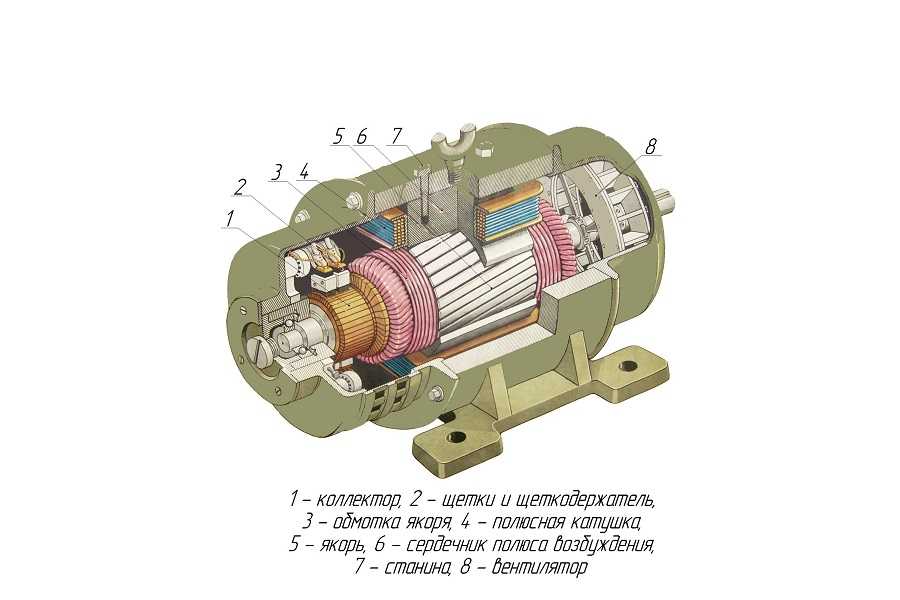 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
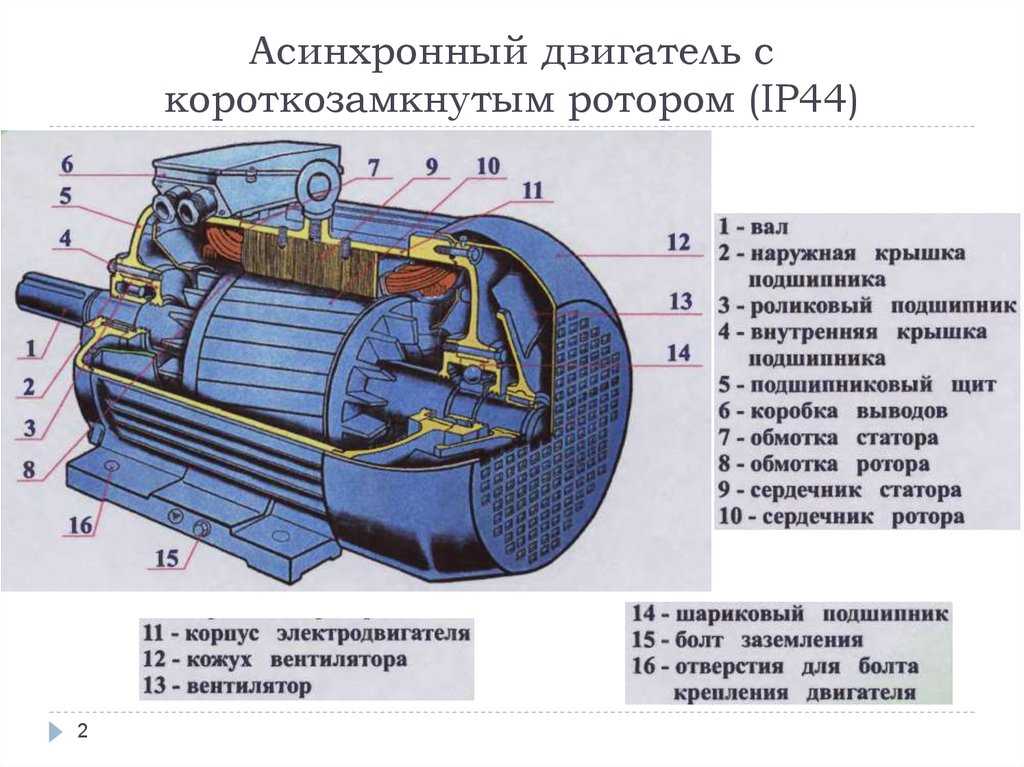
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя.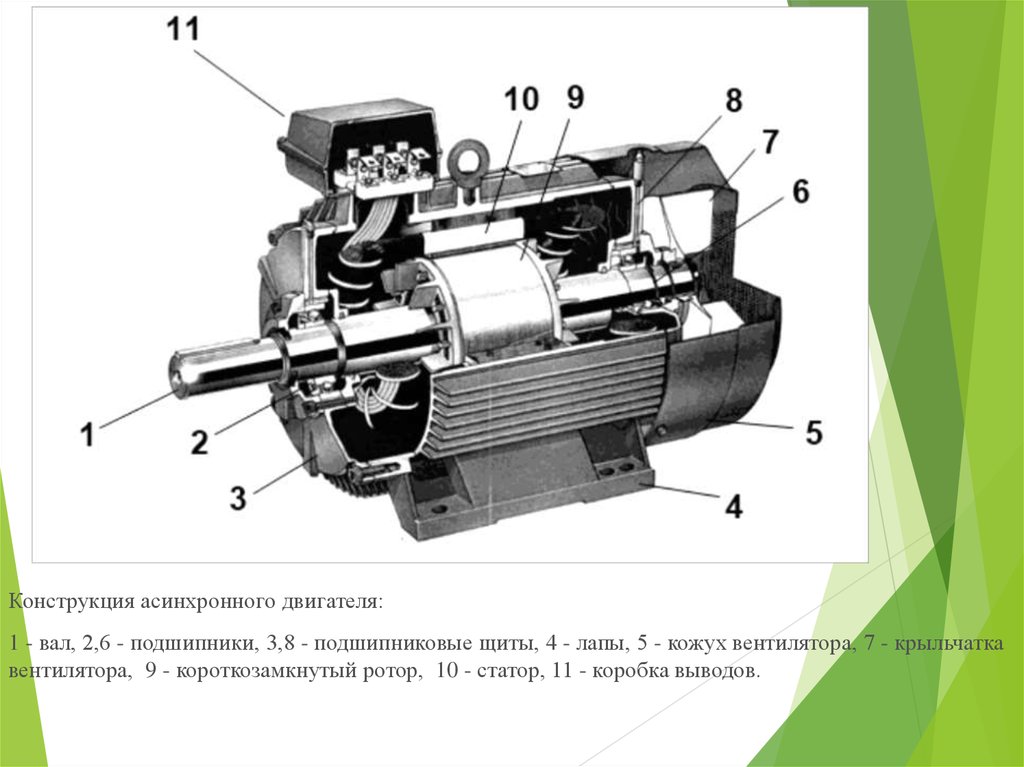 Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.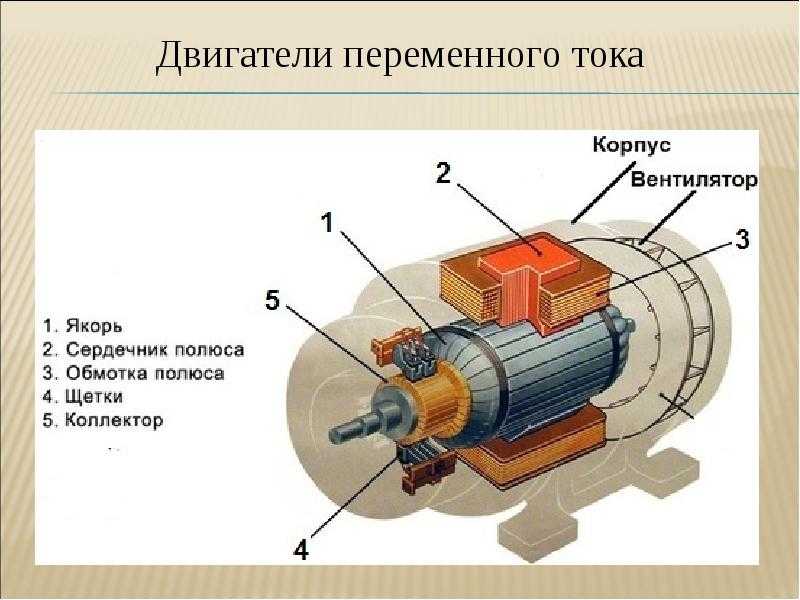
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
Шесть ключевых компонентов, из которых состоит ваш промышленный электродвигатель
Ваш промышленный электродвигатель имеет несколько важных компонентов, которые позволяют ему эффективно и действенно преобразовывать электрическую энергию в механическую. Каждый из них помогает управлять критическим взаимодействием между магнитным полем вашего двигателя и электрическим током в его проволочной обмотке для создания силы в виде вращения вала. Именно механическая энергия, вырабатываемая этим вращением вала, помогает поддерживать бесперебойную работу вашего предприятия.
Эти шесть компонентов включают:
1) Ротор
Ротор — это движущаяся часть вашего электродвигателя.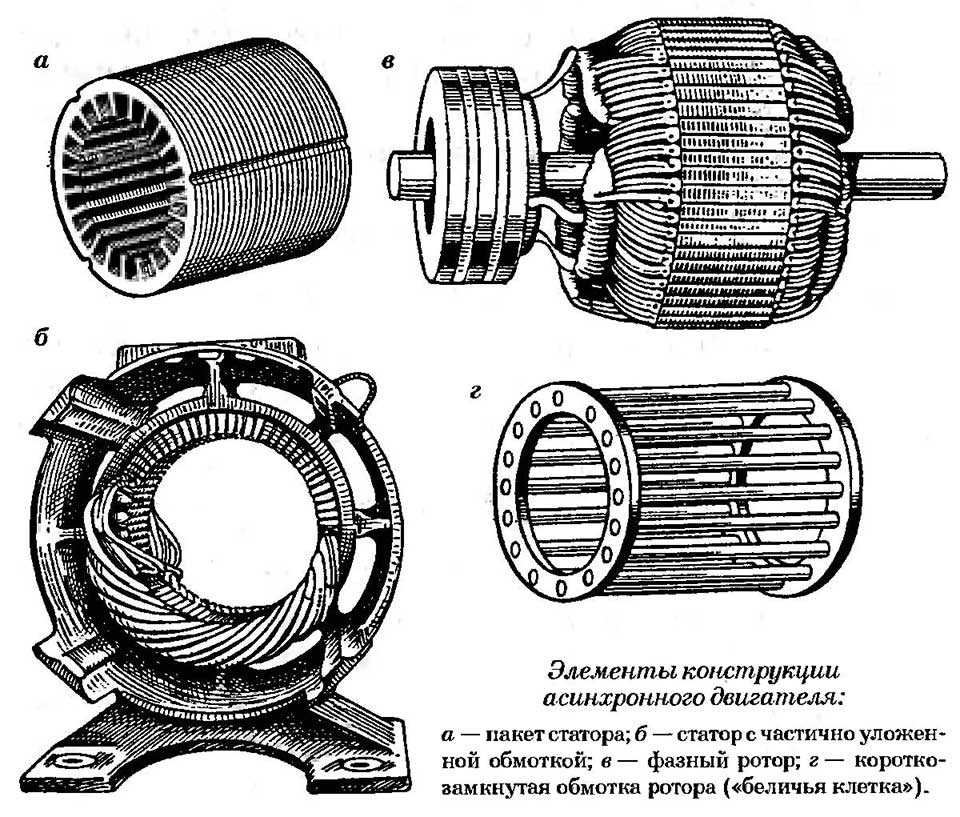 Он вращает вал, который обеспечивает механическую мощность, упомянутую выше. В типичной конфигурации ротор имеет проводники, по которым проходят токи, которые затем взаимодействуют с магнитным полем статора, создавая силы, вращающие вал. Сказав это, некоторые роторы несут постоянные магниты, а статор удерживает проводники.
Он вращает вал, который обеспечивает механическую мощность, упомянутую выше. В типичной конфигурации ротор имеет проводники, по которым проходят токи, которые затем взаимодействуют с магнитным полем статора, создавая силы, вращающие вал. Сказав это, некоторые роторы несут постоянные магниты, а статор удерживает проводники.
2) Статор (и сердечник статора)
Статор является неподвижной частью электромагнитной цепи вашего двигателя и обычно состоит из обмоток или постоянных магнитов. Сердечник статора состоит из множества тонких металлических листов, называемых пластинами. Ламинирование используется для уменьшения потерь энергии, которые могли бы возникнуть при использовании твердого сердечника.
3) Подшипники
Ротор вашего электродвигателя поддерживается подшипниками, которые позволяют ему вращаться вокруг своей оси. Эти подшипники, в свою очередь, опираются на корпус двигателя. Вал двигателя проходит через подшипники наружу двигателя, где прикладывается нагрузка.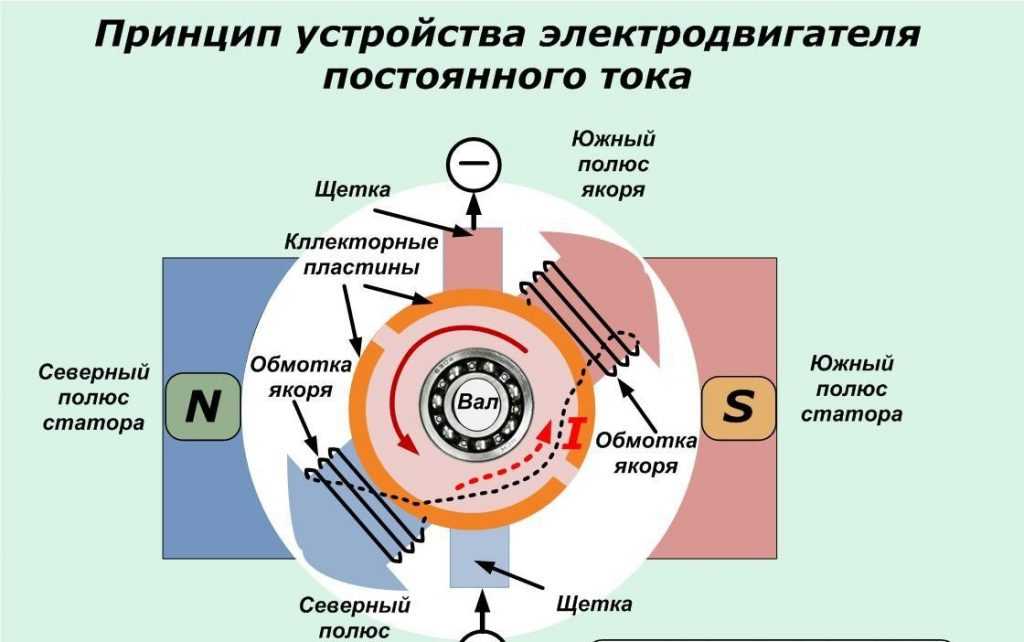 Поскольку силы нагрузки действуют за пределы самого внешнего подшипника, говорят, что нагрузка «висит».
Поскольку силы нагрузки действуют за пределы самого внешнего подшипника, говорят, что нагрузка «висит».
4) Обмотки
Обмотки представляют собой провода, свернутые в катушки, обычно намотанные на ламинированный магнитный сердечник из мягкого железа, чтобы образовывать магнитные полюса при подаче тока. Электродвигатели бывают двух основных конфигураций полюсов магнитного поля: с явно выраженными и неявнополюсными. В явнополюсном двигателе магнитное поле полюса создается обмоткой, намотанной вокруг полюса под поверхностью полюса. В неявнополюсном двигателе обмотка распределяется в пазах на торцах полюсов. Двигатель с экранированными полюсами имеет обмотку вокруг части полюса, которая задерживает фазу магнитного поля для этого полюса.
5) Воздушный зазор
Воздушный зазор не является физическим компонентом, но представляет собой расстояние между ротором и статором. Воздушный зазор вашего двигателя имеет важные последствия и, как правило, должен быть как можно меньше, так как большой зазор оказывает сильное негативное влияние на производительность. Это основной источник низкого коэффициента мощности, при котором работают двигатели. Поскольку ток намагничивания увеличивается с увеличением воздушного зазора, воздушный зазор должен быть минимальным. При этом очень маленькие зазоры могут создавать механические проблемы в дополнение к шуму и потерям.
Это основной источник низкого коэффициента мощности, при котором работают двигатели. Поскольку ток намагничивания увеличивается с увеличением воздушного зазора, воздушный зазор должен быть минимальным. При этом очень маленькие зазоры могут создавать механические проблемы в дополнение к шуму и потерям.
6) Коммутатор
И, наконец, коммутатор — это механизм, используемый вашим двигателем для переключения входа большинства двигателей постоянного тока и некоторых двигателей переменного тока. Он состоит из сегментов контактных колец, изолированных друг от друга и от вала. Ток якоря вашего двигателя подается через стационарные щетки, контактирующие с вращающимся коммутатором, что вызывает необходимое изменение направления тока и оптимальным образом подает мощность на машину, когда ротор вращается от полюса к полюсу. (Отсутствие такого реверсирования тока приведет к остановке вашего двигателя.)
Что общего у всех этих компонентов?
Каждому из них в любой момент может потребоваться техническое обслуживание, ремонт или замена.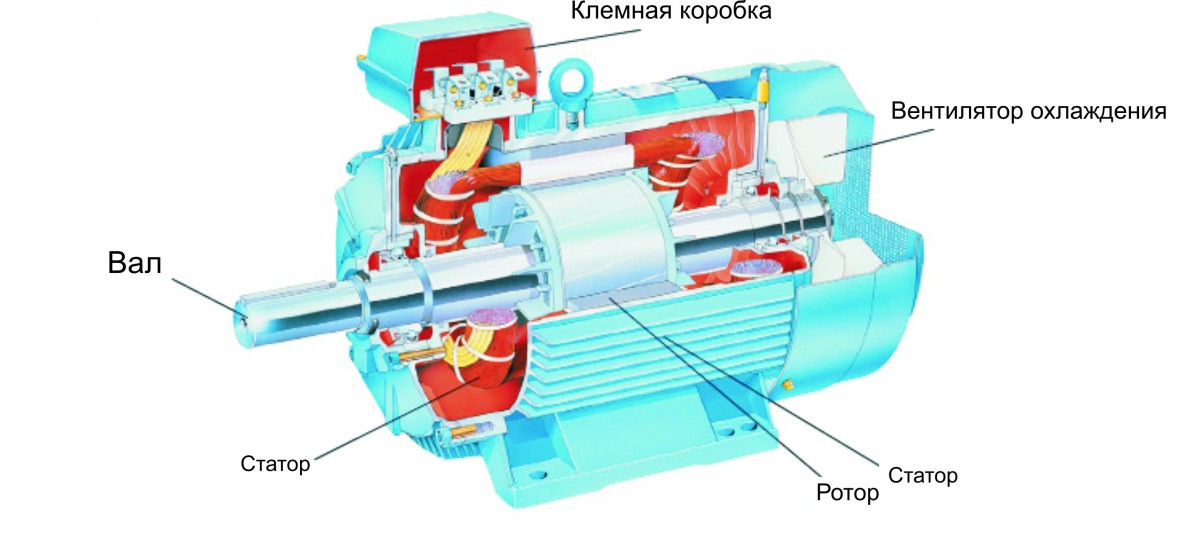 Вот где на помощь приходит Red Stick Armature Works. Мы обладаем более чем 60-летним опытом организации обслуживания, хранения и продажи промышленных электродвигателей. Наши преданные своему делу и опытные технические специалисты доступны на месте 24-7-365, чтобы помочь вам обеспечить бесперебойную работу ваших двигателей и ваших операций. Свяжитесь с нами или позвоните нам сегодня по телефону 800-895-0443, чтобы узнать больше.
Вот где на помощь приходит Red Stick Armature Works. Мы обладаем более чем 60-летним опытом организации обслуживания, хранения и продажи промышленных электродвигателей. Наши преданные своему делу и опытные технические специалисты доступны на месте 24-7-365, чтобы помочь вам обеспечить бесперебойную работу ваших двигателей и ваших операций. Свяжитесь с нами или позвоните нам сегодня по телефону 800-895-0443, чтобы узнать больше.
Сообщение от
RSAW включен
Основные компоненты электродвигателей ~ Электрические ноу-хау
В предыдущей теме « Классификация электрических нагрузок и
Типы », я показываю, что электрические нагрузки могут быть классифицированы по различным категориям в соответствии с различными факторами; один из этих факторов зависит от функции нагрузки/использования следующим образом:
Третья классификация: Классификация электрических нагрузок в зависимости от функции нагрузки
- Осветительная нагрузка.

- Бытовая загрузка.
- Силовые нагрузки.

В следующих предыдущих темах я объяснил первый тип; осветительная нагрузка:
- Классификация электрических нагрузок и
Типы – часть четвертая
- Типы и конструкция искусственного освещения
- Светильники для внутреннего освещения
Классификации – Часть первая
- Светильники для внутреннего освещения
Классификации – часть вторая
- Светильники наружного освещения
классификации
- Введение в дизайн освещения
Процесс
И я объяснил второй тип; Бытовая техника Загрузка в следующей предыдущей теме:
- Бытовая техника
Электрические нагрузки
Типы и классификация
И я показал, что третий и последний тип электрических нагрузок в зависимости от функции / использования нагрузки — это силовые нагрузки, которые можно разделить на следующие основные нагрузки:
- Нагрузки HVAC (нагрузки систем отопления, вентиляции и кондиционирования воздуха).
- Нагрузки на лифты, эскалаторы и движущиеся дорожки (нагрузки на транспортные системы).
- Моторные и насосные нагрузки (противопожарные, насосные, ирригационные системы и т. д.).
С этого курса
EE-1 предназначен для новичков в области электрического проектирования, я должен подробно объяснить эти нагрузки или системы и указать их конструкцию, принципы работы и их различные типы. Итак, я объяснил первый тип силовых нагрузок; HVAC Нагрузки в следующих предыдущих темах:
- Типы систем отопления. Часть первая
- Типы систем отопления – часть вторая
- Конфигурации системы кондиционирования воздуха — часть первая
- Кондиционер
Конфигурации систем — часть вторая
- Воздух
Конфигурации системы кондиционирования — часть третья
- ОВКВ
Основное оборудование системы
- ОВКВ
Системы управления и система автоматизации зданий
Также я объяснил второй пункт силовых нагрузок; Лифты, эскалаторы и движущиеся дорожки Нагрузки (нагрузки на транспортную систему) в следующих предыдущих темах:
- Типы и классификация лифтов — Часть первая
- Лифты
Типы и классификация. Часть вторая
 Часть вторая
Часть вторая - Базовый
Компоненты лифта — часть первая
- Основные компоненты лифта — часть вторая
- Лифт
Машина и система привода
- Лифт
Система безопасности
- Система управления лифтом – часть первая
- Лифт
Система управления — часть вторая
- Гидравлический
Основные компоненты лифтов
- Эскалаторы
Основные компоненты — часть первая
- Эскалаторы
Основные компоненты – часть вторая
- Электрооборудование, система управления и движущиеся дорожки
Введение
- Электродвигатели, определяемые как электромеханические устройства, преобразующие электрическую энергию в механическую; они являются интерфейсом между электрическими и механическими системами объекта.
- Электродвигатели являются важной частью любой электрической системы. Они использовались на каждом производственном предприятии, в офисе и дома, потребляя около 64% всей вырабатываемой электроэнергии.
- Существует множество способов конструирования двигателя, поэтому существует множество различных типов двигателей, и каждый тип обладает различными рабочими характеристиками (которые будут перечислены позже). На основании этих характеристик можно выбрать двигатель для конкретного применения.
Принцип работы двигателей:
| Принцип работы двигателей |
- Электрический ток, протекающий по проволочной петле, создаст магнитное поле в петле.
- Когда эта петля окружена полем другого магнита, петля будет вращаться, создавая силу (называемую крутящим моментом), которая приводит к механическому движению
Основные детали двигателя:
Электрические машины подразделяются на две категории: двигатели постоянного и переменного тока, основные детали каждого типа различаются для каждого типа следующим образом:
1- AC Motor Basic Parts:
373 3 .
1- Корпус
| Motor Parts |
| Корпус |
Корпус состоит из рамы (или хомута) и двух концевых кронштейнов (или корпусов подшипников).
Кожух двигателя не только скрепляет компоненты двигателя, но и защищает внутренние компоненты от влаги и загрязнений. Степень защиты зависит от типа корпуса. Кроме того, тип корпуса влияет на охлаждение двигателя. Существует две категории корпусов:
- Открытый корпус.
- Полностью закрытый корпус.
| Open and Enclosed Types |
A- Open Enclosure
| open drip proof (ODP) enclosure |
Открытые корпуса позволяют охлаждающему воздуху проходить через двигатель. Одним из типов открытого корпуса является открытый корпус с защитой от капель (ODP). В этом корпусе есть вентиляционные отверстия, которые обеспечивают приток воздуха. Лопасти вентилятора, прикрепленные к ротору, пропускают воздух через двигатель, когда ротор вращается. Вентиляционные отверстия расположены таким образом, чтобы жидкости и твердые частицы, падающие сверху под углом до 15° от вертикали, не могли попасть внутрь двигателя, когда двигатель установлен на горизонтальной поверхности. Когда двигатель установлен на вертикальной поверхности, такой как стена или панель, может потребоваться специальная крышка. Корпуса ODP следует использовать в среде, свободной от загрязнений.
Одним из типов открытого корпуса является открытый корпус с защитой от капель (ODP). В этом корпусе есть вентиляционные отверстия, которые обеспечивают приток воздуха. Лопасти вентилятора, прикрепленные к ротору, пропускают воздух через двигатель, когда ротор вращается. Вентиляционные отверстия расположены таким образом, чтобы жидкости и твердые частицы, падающие сверху под углом до 15° от вертикали, не могли попасть внутрь двигателя, когда двигатель установлен на горизонтальной поверхности. Когда двигатель установлен на вертикальной поверхности, такой как стена или панель, может потребоваться специальная крышка. Корпуса ODP следует использовать в среде, свободной от загрязнений.
B- Полностью закрытый корпус
В эту категорию входят следующие три типа:
- Полностью закрытый невентилируемый корпус.
- Полностью закрытый корпус с вентиляторным охлаждением.
- Взрывозащищенный корпус.
a- Полностью закрытый невентилируемый корпус (TENV)
| Полностью закрытый невентилируемый корпус (TENV) |
В некоторых случаях окружающий двигатель воздух содержит коррозионные или вредные элементы, которые могут повредить внутренние части двигателя. Полностью закрытый невентилируемый (TENV) корпус двигателя ограничивает поток воздуха в двигатель, но не является герметичным. Однако уплотнение в месте прохождения вала через корпус предотвращает попадание воды, пыли и других инородных тел в двигатель вдоль вала.
Полностью закрытый невентилируемый (TENV) корпус двигателя ограничивает поток воздуха в двигатель, но не является герметичным. Однако уплотнение в месте прохождения вала через корпус предотвращает попадание воды, пыли и других инородных тел в двигатель вдоль вала.
Большинство двигателей TENV имеют дробную мощность. Однако для специальных применений используются встроенные двигатели TENV мощностью 1 л.с. Отсутствие вентиляционных отверстий означает, что все тепло внутри двигателя должно рассеиваться через корпус за счет теплопроводности. Эти двигатели TENV большей мощности имеют корпус с сильными ребрами, помогающими быстрее рассеивать тепло. Двигатели ТЭНВ могут использоваться как внутри помещений, так и снаружи.
b- Полностью закрытый корпус с вентиляторным охлаждением (TEFC)
| Полностью закрытый корпус с вентиляторным охлаждением (TEFC) |
Полностью закрытый двигатель с вентиляторным охлаждением (TEFC) аналогичен двигателю TENV, но имеет внешний вентилятор, установленный напротив приводной стороны двигателя.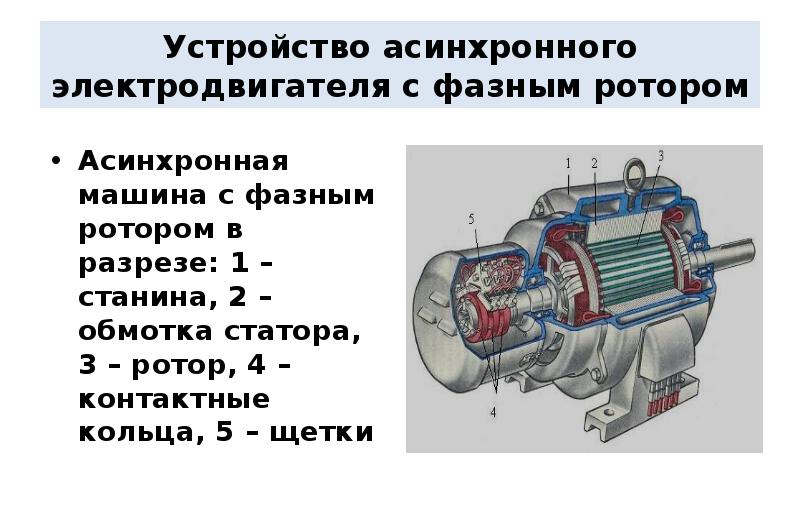 Вентилятор обдувает двигатель снаружи для дополнительного охлаждения. Вентилятор закрыт кожухом, чтобы никто не мог к нему прикоснуться. Двигатели TEFC можно использовать в грязных, влажных или слабокоррозионных средах.
Вентилятор обдувает двигатель снаружи для дополнительного охлаждения. Вентилятор закрыт кожухом, чтобы никто не мог к нему прикоснуться. Двигатели TEFC можно использовать в грязных, влажных или слабокоррозионных средах.
C- Взрыв-защищенное в кожух (XP)
Поленичный корпус. , целлюлозно-бумажная, утилизация отходов и нефтехимическая промышленность. В этих приложениях двигатели должны соответствовать самым строгим стандартам безопасности для защиты жизни, машин и окружающей среды. Это часто требует использования взрывозащищенных (XP) двигателей.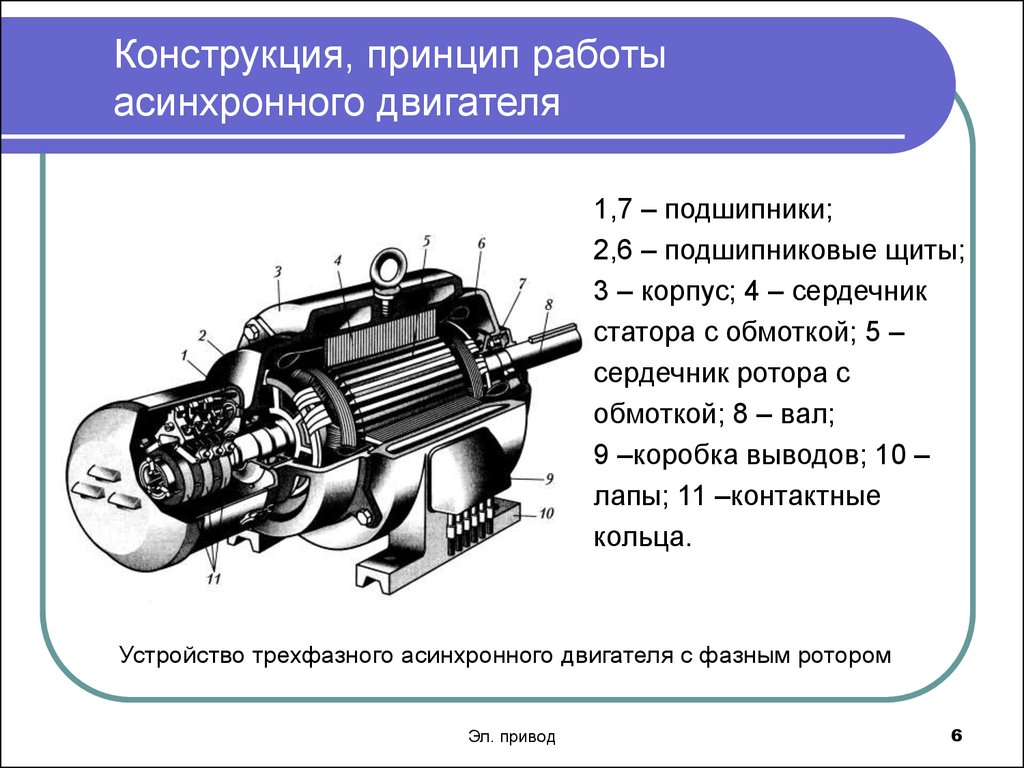 Например, Например,— Класс I, группы от A до D содержат газы или пары. — Класс II, группы E, F и G содержат легковоспламеняющуюся пыль, такую как коксовая или зерновая пыль. — Класс III не делится на группы. Этот класс включает воспламеняющиеся волокна и ворс. 2- Stator
The motor stator consists of two main parts: A- Stator Core B- Статор (обмотки) При работе собранного двигателя обмотки статора подключаются непосредственно к источнику питания. Каждая группа катушек вместе со стальным сердечником, который она окружает, становится электромагнитом при подаче тока. Электромагнетизм является основным принципом работы двигателя. 3- Ротор
электромагнитная цепь ротора. Магнитное поле статора наводит противоположное магнитное поле на ротор, заставляя ротор «отталкиваться» от поля статора. Существует множество типов роторов, таких как ротор с короткозамкнутым ротором и ротор с фазной обмоткой, они будут объяснены позже. 4- Подшипники
Подшипники, установленные на валу, поддерживают ротор и позволяют ему вращаться.
Размер используемого подшипника изначально выбирается на основе его грузоподъемности, в зависимости от нагрузки, которую необходимо нести, и требований, касающихся его срока службы и надежности. Необходимо также учитывать другие факторы, такие как рабочая температура, грязные и пыльные условия окружающей среды, а также вибрация и удары, воздействующие на подшипники в рабочем состоянии и в состоянии покоя. Типы подшипников: A- Радиальные шарикоподшипники Радиальные шарикоподшипники являются наиболее распространенными. В шарикоподшипнике нагрузка передается от наружного кольца к шарику и от шарика к внутреннему кольцу. Поскольку мяч является сферой, он касается внутренней и внешней обоймы только в очень маленькой точке, что помогает ему очень плавно вращаться. Это также означает, что площадь контакта, удерживающая нагрузку, не очень велика, поэтому, если подшипник перегружен, шарики могут деформироваться, разрушая подшипник. B- Цилиндрические роликовые подшипники Эти роликовые подшипники используются в тех случаях, когда они должны выдерживать большие радиальные нагрузки. В роликовом подшипнике ролик представляет собой цилиндр, поэтому контакт между внутренней и внешней обоймой представляет собой не точку, а линию. Это распределяет нагрузку по большей площади, позволяя подшипнику выдерживать гораздо большие радиальные нагрузки, чем шариковый подшипник. Однако этот тип подшипника не рассчитан на большую осевую нагрузку. C- Радиально-упорные шарикоподшипники Радиально-упорные шарикоподшипники имеют дорожки качения во внутреннем и наружном кольцах, смещенные относительно друг друга в направлении оси подшипника. Это означает, что они подходят для восприятия комбинированных нагрузок, таких как одновременно действующие радиальные и осевые нагрузки в вертикальных машинах. D- Сферический упорный роликоподшипник В упорных сферических роликоподшипниках нагрузка передается от одной дорожки качения к другой под углом к оси подшипника. Они подходят для восприятия высоких осевых нагрузок в дополнение к одновременно действующим небольшим радиальным нагрузкам. Сферические упорные роликоподшипники также являются самоустанавливающимися. E- Подшипники скольжения Подшипники скольжения не имеют движущихся частей, в них используется тонкая пленка масла, которая уменьшает трение и позволяет валу двигателя свободно вращаться. При правильной смазке фактически отсутствует физический контакт между подшипником и валом. Если по какой-либо причине масляная пленка разрушится, контакт металла с металлом между валом и подшипником приведет к очень быстрому износу подшипника и скорому выходу из строя Подшипники скольжения часто выбирают из-за их относительно тихой работы и более низкой стоимости по сравнению с к шарикоподшипникам. Подшипники скольжения можно разделить на: a- Фланцевые подшипники скольжения применяются для машин с высотой вала до 1120мм. Машины с подшипниками этого типа быстро и легко выравниваются. Воздушный зазор между статором и ротором уже отрегулирован на заводе и не требует дополнительной регулировки на месте во время установки. b- Подшипники скольжения на лапах установлены на опоре. Основание может быть встроено в раму статора или может быть установлено отдельно. 5- Conduit Box
Точка подключения электропитания к обмоткам статора двигателя. 6- Eye Bolt
Used to lift heavy motors with a hoist or crane to prevent motor damage. 2- DC Motor Basic Parts:
The basic parts for DC motors are as follows: 1- Stator Статор несет обмотку возбуждения и полюса. 2- Ротор Несет обмотку якоря. Арматура является несущим элементом. Ротор имеет цилиндрическую форму. 3- Обмотка якоря Эта обмотка вращается в магнитном поле, установленном на неподвижной обмотке (обмотка возбуждения). Это несущий элемент, установленный на роторе. Обмотка якоря представляет собой непрерывную обмотку; то есть у него нет ни начала, ни конца. Он состоит из нескольких катушек, соединенных последовательно. 4- Обмотка возбуждения Это система возбуждения, которая может быть электрической обмоткой или постоянным магнитом и расположена на статоре. Примечание. Двигатели постоянного тока обычно классифицируются по способу подключения их обмотки якоря и возбуждения к источнику питания постоянного тока. 5- Коллектор
Катушки на якоре заделываются и соединяются между собой через коммутатор, который состоит из нескольких стержней или сегментов коммутатора, которые изолированы друг от друга. Коллектор вращается вместе с ротором и служит для выпрямления наведенного напряжения и тока в якоре, оба из которых являются переменными.
|

 Не все подшипники подходят для любого применения; универсального универсального подшипника не существует. Выбор подшипникового узла основывается на следующих качествах:
Не все подшипники подходят для любого применения; универсального универсального подшипника не существует. Выбор подшипникового узла основывается на следующих качествах: типа подшипника, и может выдерживать как радиальные, так и осевые нагрузки. Благодаря низкому крутящему моменту они подходят для высоких скоростей.
типа подшипника, и может выдерживать как радиальные, так и осевые нагрузки. Благодаря низкому крутящему моменту они подходят для высоких скоростей.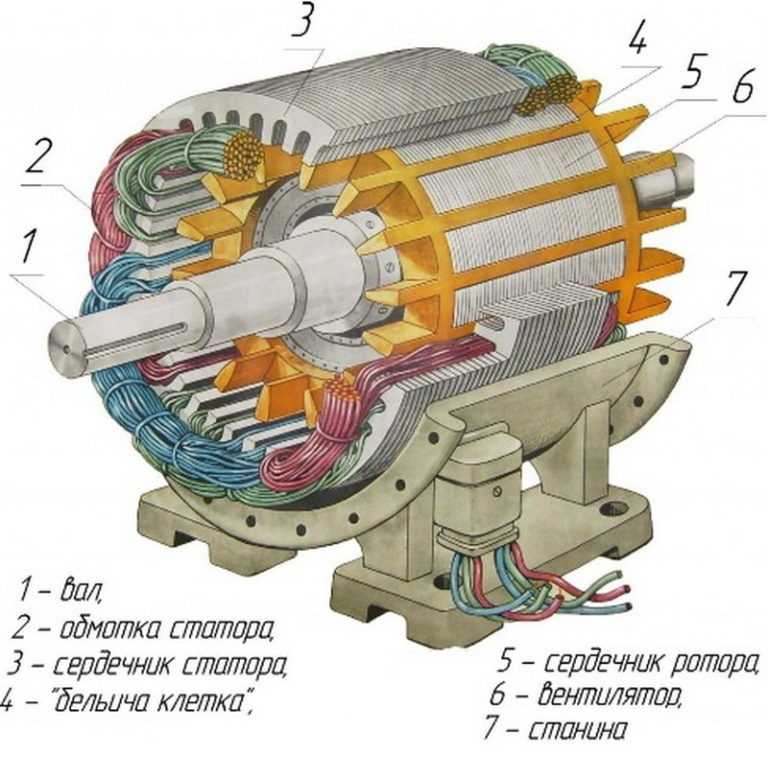
 Эта масляная пленка имеет решающее значение для срока службы подшипника скольжения.
Эта масляная пленка имеет решающее значение для срока службы подшипника скольжения. Если он встроен в раму статора, его легко и быстро выровнять.
Если он встроен в раму статора, его легко и быстро выровнять.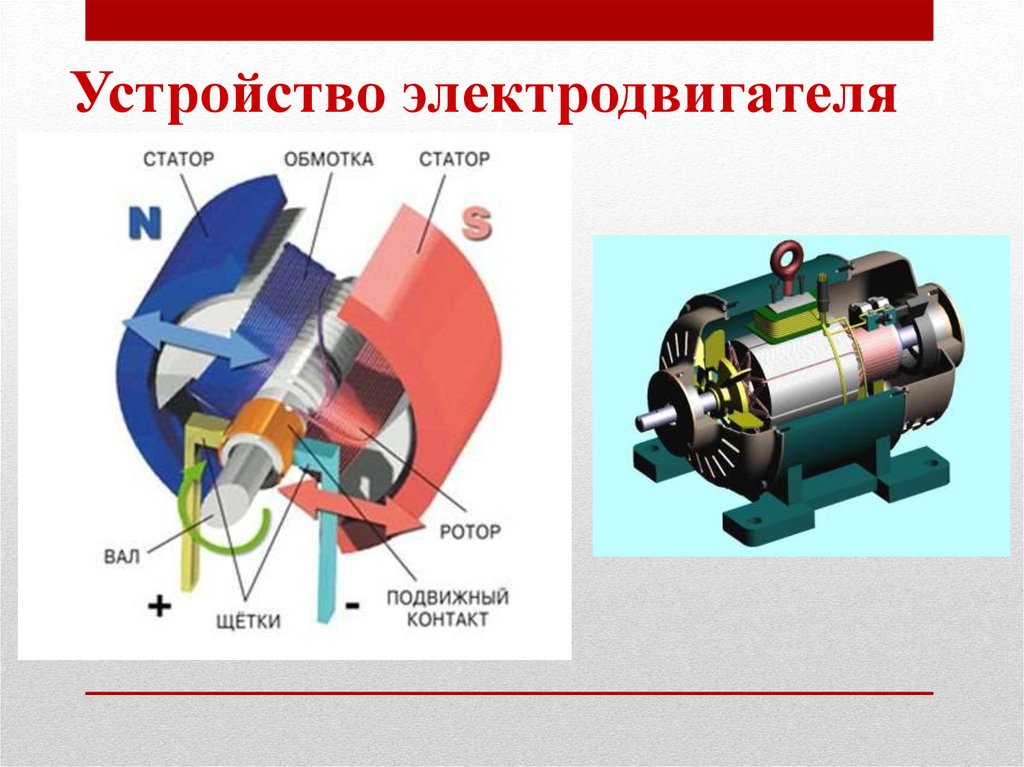 Статор вместе с ротором составляет магнитопровод или сердечник машины. Это полый цилиндр.
Статор вместе с ротором составляет магнитопровод или сердечник машины. Это полый цилиндр.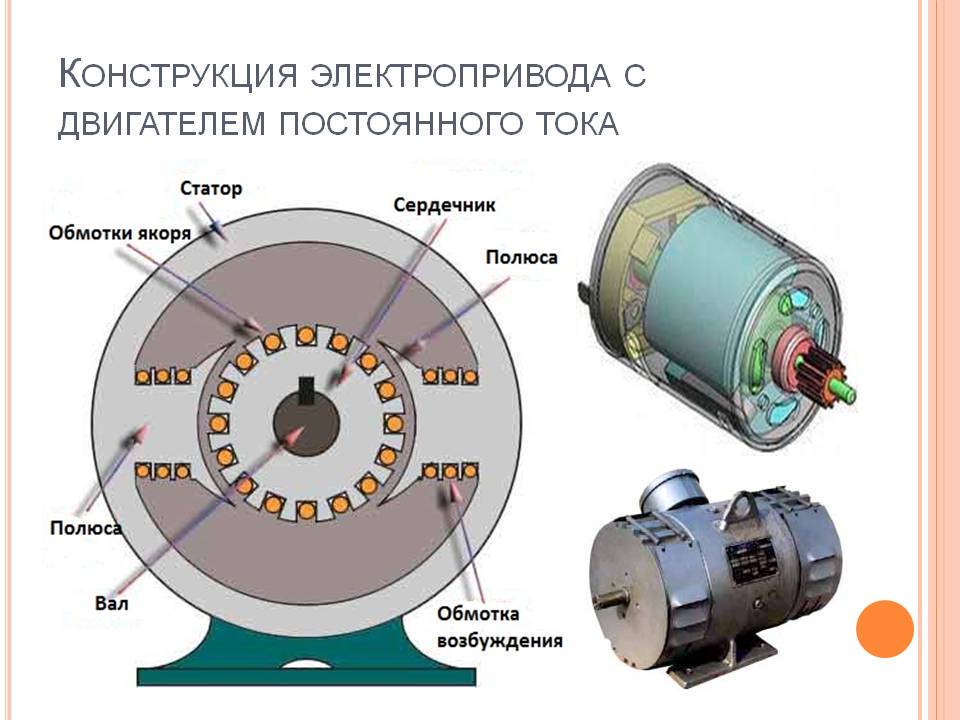
Они представляют собой токопроводящие угольно-графитовые подпружиненные элементы, которые перемещаются по коллектору и действуют как интерфейс между внешней цепью и обмоткой якоря.
7- Poles
| Полюса |
.