Типы шаговых двигателей
Шаговый двигатель постоянного тока – это электромеханическое устройство, преобразующее сигнал управления в угловое (или линейное) перемещение
ротора с фиксацией его в заданном положении без устройств обратной связи. При проектировании конкретных систем
приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное
управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель
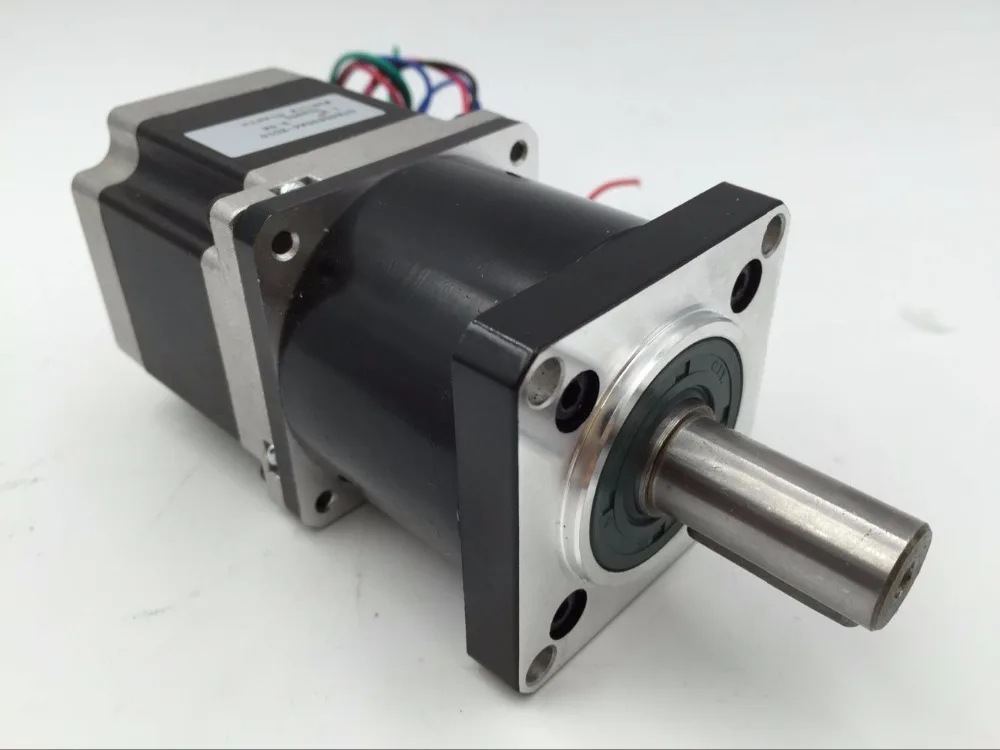
является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован
понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у
котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же,
шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что
ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые
Готовые шаговые
двигатели с редукторами хотя и существуют, однако являются экзотикой.
купить шаговый двигатель
купить блок управления шаговым двигателем
Виды шаговых двигателей:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
- биполярные и униполярные шаговые двигатели
Способы управления фазами шагового двигателя:
- полношаговый режим
- полушаговый режим
- микрошаговый режим
Зависимость момента от скорости, влияние нагрузки:
Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера. У идеального
У идеального
шагового двигателя эта зависимость …далее ➠
Разгон шагового двигателя:
Для того, чтобы работать на большой скорости из области разгона, необходимо стартовать на низкой скорости
из области
старта, а затем выполнить …далее ➠
Резонанс шагового двигателя:
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде
внезапного
падения момента на некоторых …далее ➠
Недостатки шагового двигателя:
- шаговым двигателям присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Преимущества шагового двигателя:
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость.
 Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу
Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу - возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к
валу двигателя без промежуточного редуктора - может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных
импульсов
 Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу
Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагуОригинал этой статьи можно прочитать в журнале «Основы схемотехники», №6-7/2001. Автор — Л.Ридико
какова разница и что выбрать? — MULTICUT
Обновлено: 31. 10.2022
10.2022
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.
Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
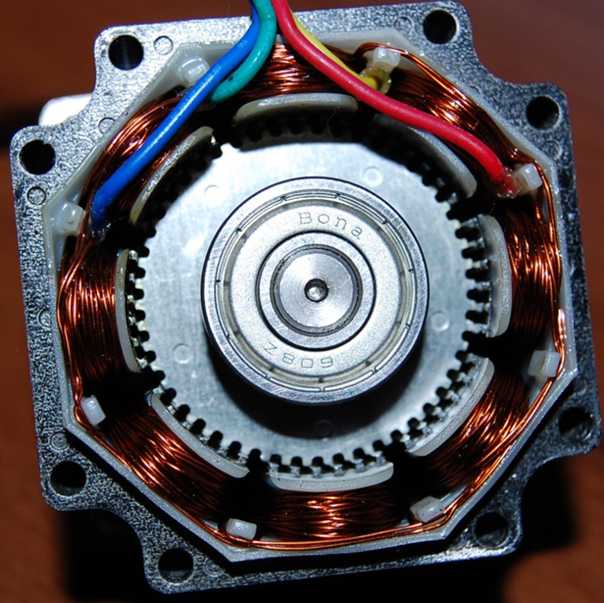
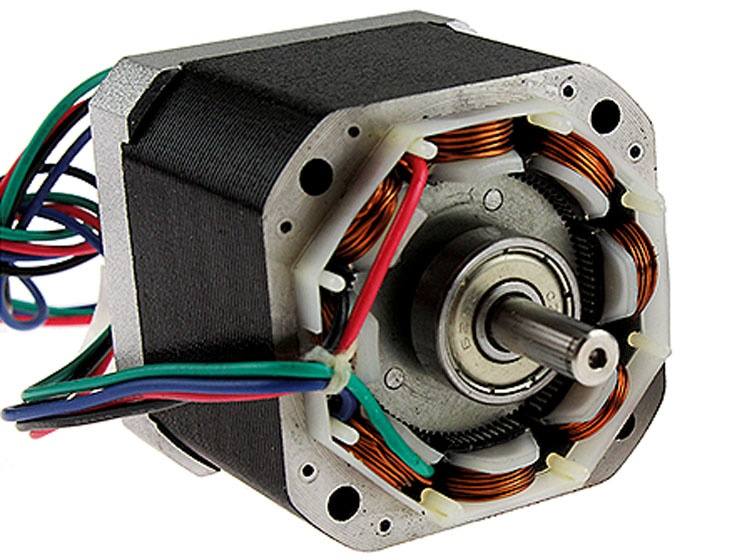
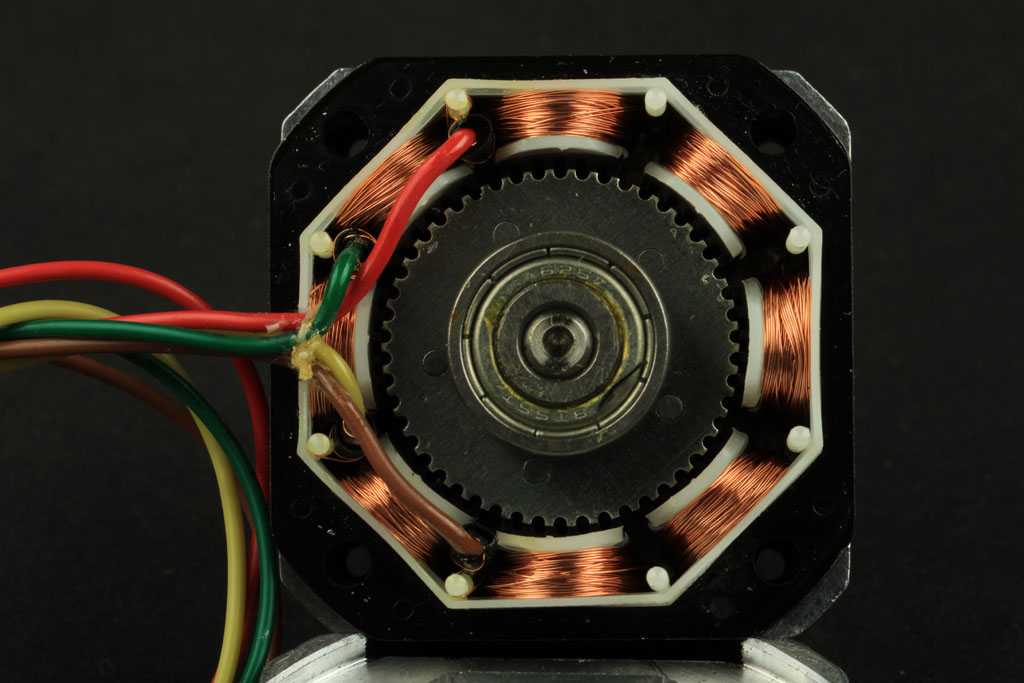
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.
Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Пройти тест
Чем отличается сервопривод от шагового двигателя?
|
Критерий сравнения |
Шаговые двигатели |
Сервоприводы |
|---|---|---|
|
Эксплуатационный ресурс |
Шаговые электромоторы не имеют коллекторного узла, подверженного износу.  Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене
|
Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям |
|
Точность перемещений исполнительного органа |
|
|
|
Время разгона и скорость перемещения портала |
|
|
|
Реакция на принудительную остановку |
Шаговые двигатели хорошо переносят механические перегрузки и не выходят из строя при аварийных остановках |
Сервоприводы необходимо оснащать дополнительной защитой, отключающей электромотор при принудительной остановке портала. В противном случае обмотки электрической машины могут сгореть |
|
Стоимость |
За счет простоты конструкции шаговый двигатель имеет относительно невысокую цену |
За счет датчиков обратной связи (энкодеров) и более сложной схемы регулирования сервопривод считается дорогостоящим оборудованием |
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
-
Производительность.
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель. -
Эксплуатационные расходы.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше. -
Точность.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
-
Цена.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант. -
Уровень шума.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.

 Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
Читайте также
Обновлено: 18.12.2022
Фрезерные станки с ЧПУ для малого бизнеса
Для построения и развития успешного бизнеса, связанного с работой на фрезерном станке с ЧПУ, важно наличие значительных преимуществ перед конкурентами: например, высочайшего качества продукции и доступных цен. В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…
В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…
Подробнее
Обновлено: 18.12.2022
Технические характеристики и сфера применения фрезерных станков с ЧПУ
Станки с ЧПУ значительно повлияли на сферу металлообработки и на работу с другими материалами. Программируемые установки обеспечиваюют повышенную точность фрезеровки, что приводит к значительному увеличению производительности труда. Процесс обработки заготовок проходит беспрерывно и в строгом соответствии заданной программе, а результат работы отличается высокой точностью. В статье мы рассмотрим важнейшие технические характеристики фрезерных станков с ЧПУ и основные сферы их применения…
Подробнее
Обновлено: 18.12.2022
Фрезы для деревообрабатывающих станков с ЧПУ
Рабочий режущий инструмент станков с ЧПУ — это фреза. Конструктивно она является вращающейся деталью с заточенными зубьями. Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Подробнее
Обновлено: 06.01.2023
Характеристики шагового двигателя
Шаговое устройство — бесщеточный двигатель с несколькими обмотками, функционирующий по синхронному принципу. Принцип работы шагового двигателя заключается в поочередной активации обмоток, которые обеспечивают вращение / остановку ротора…
Подробнее
Обновлено: 06.01.2023
Специфика сверлильных станков с ЧПУ
Современные сверлильные станки с ЧПУ используются на производствах, на которых в больших объемах осуществляется обработка деталей всевозможного назначения, например, на мебельных фабриках. Сегодня производители предлагают покупателям модели сверлильных станков с ЧПУ во всем функциональном многообразии. ..
..
Подробнее
Возврат к списку
Поделиться:
Шаговые двигатели
. Множество размеров и версий мощности.
Шаговые двигатели с обратной связью как альтернатива двигателям BLDC
Технология шаговых двигателей долгое время считалась экономичной альтернативой приложениям, не требующим высокой производительности, обеспечиваемой серводвигателями. Благодаря привлекательной цене производства и сравнительно высокому соотношению крутящего момента к размеру они продолжали использоваться в приборостроении. Однако для вспомогательных осей в машиностроении предпочтение стали отдавать сервосистемам. Хотя сервоприводы часто были более дорогими из-за утомительного тестирования рамп, чтобы избежать резонансных полос, и из-за более сложных размеров из-за отсутствия обратной связи, их было легче вводить в эксплуатацию, и это делало их более привлекательными для производства ограниченными партиями. .
Эта тенденция была остановлена и даже обращена вспять в последние годы благодаря разработке управляемых шаговых двигателей с обратной связью. Сердцем технологии с обратной связью является регулирование тока с поправкой на мощность и обратная связь по управляющему сигналу. Эти шаговые двигатели управляются точно так же, как и серводвигатели: положение ротора определяется с помощью сигналов энкодера, а в обмотках двигателя генерируются синусоидальные фазные токи. Векторное управление магнитным полем гарантирует, что магнитное поле статора всегда перпендикулярно магнитному полю ротора и что напряженность поля точно соответствует желаемому крутящему моменту. Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
Сердцем технологии с обратной связью является регулирование тока с поправкой на мощность и обратная связь по управляющему сигналу. Эти шаговые двигатели управляются точно так же, как и серводвигатели: положение ротора определяется с помощью сигналов энкодера, а в обмотках двигателя генерируются синусоидальные фазные токи. Векторное управление магнитным полем гарантирует, что магнитное поле статора всегда перпендикулярно магнитному полю ротора и что напряженность поля точно соответствует желаемому крутящему моменту. Таким образом, шаговый двигатель с замкнутым контуром — это не что иное, как высокополюсный бесщеточный серводвигатель постоянного тока (BLDC). Все недостатки, традиционно связанные с технологией шаговых двигателей, такие как резонансы и чрезмерное тепловыделение, больше не являются проблемой. Вместо этого теперь у нас есть система, которая может непрерывно достигать крутящего момента, в 2–3 раза превышающего крутящий момент серводвигателя того же размера при 20–50% номинальной скорости.
В сочетании с более выгодной ценой системы шаговых двигателей, шаговые двигатели с обратной связью являются экономичной альтернативой сервосистемам. Тем не менее, системам с обратной связью не всегда удавалось вытеснить системы с обратной связью в традиционных приложениях с шаговыми двигателями, таких как автоматизация лабораторий или небольшие фрезерные станки с ЧПУ. Хотя технология с обратной связью и здесь дает преимущества, высокая стоимость энкодера, которая обычно намного превышает стоимость небольшого двигателя, как правило, препятствует широкому использованию этой технологии в этих приложениях. Кроме того, для этих приложений обычно достаточно точности позиционирования шаговых двигателей без энкодера.
Виртуальный энкодер заменяет реальный энкодер
Чтобы воспользоваться преимуществами ориентированного на поле управления в этих приложениях, Nanotec разработала безсенсорное, т.е. без энкодера, управление шаговыми двигателями, в котором фактическое положение а скорость ротора определяется «виртуальным энкодером» в контроллере.
Системы без датчиков уже много лет используются в двигателях BLDC, особенно в вентиляторах и насосах, не требующих управления положением. Во всех бессенсорных системах используется физический эффект, заключающийся в том, что двигатель индуцирует противодействующее напряжение (противоЭДС) во время работы, которое пропорционально скорости.
Простейший безсенсорный контроль заключается в прямом измерении противо-ЭДС, когда катушка обесточена в цикле коммутации. Однако по сравнению со стандартной активацией этот метод требует специального оборудования и стабилен только прибл. 10–20 % от номинальной скорости двигателя, ниже которой сигнал измерения слишком мал. По этой причине требовательные приложения теперь полагаются на системы, которые с помощью «наблюдателя» восстанавливают значения, которые не могут быть измерены напрямую, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является точная модель двигателя, которая параллельно с реальным двигателем вычисляет значения, такие как ток в обмотке, на основе известных входных значений, таких как установленная ШИМ. Эти расчетные значения также измеряются. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за определяемой таким образом ошибки наблюдения внутренние значения модели двигателя постоянно корректируются. Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер.
Эти расчетные значения также измеряются. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за определяемой таким образом ошибки наблюдения внутренние значения модели двигателя постоянно корректируются. Таким образом, можно получить правильные оценки для значений, которые фактически не измеряются, таких как скорость. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при малых скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер.
Все двигатели Plug & Drive от Nanotec реализуют управление, ориентированное на поле (замкнутый контур). BLDC и шаговые двигатели контролируются по полю в зависимости от нагрузки и отличаются только рабочими точками из-за разного количества полюсов. Таким образом, оба этих типа двигателей ведут себя как сервоприводы постоянного тока. Положение ротора, необходимое для управления, или угол поля можно установить с помощью поворотного энкодера или бездатчикового метода, который описан ниже.
Таким образом, оба этих типа двигателей ведут себя как сервоприводы постоянного тока. Положение ротора, необходимое для управления, или угол поля можно установить с помощью поворотного энкодера или бездатчикового метода, который описан ниже.
Без потерь на шаг, без резонансов
Критически важным фактором для качества контроллера на основе наблюдателя является хорошая модель используемого двигателя, как с точки зрения математических формул, так и с точки зрения констант двигателя подключенного двигателя.
Таким образом, перед нами стояла задача найти достаточно точную математическую модель двигателя, которую можно было бы полностью рассчитать в каждом цикле управления даже в небольшом микропроцессоре. В принципе, шаговые двигатели математически аналогичны двигателям BLDC, но имеют только две фазы вместо обычных трех фаз BLDC, а также демонстрируют некоторые особенности в модели на более высоких скоростях из-за большего количества полюсов.
Другим важным аспектом практического использования бездатчикового контроллера является идентификация параметров модели. Контроллеры BLDC часто требуют большого количества параметров, зависящих от двигателя, которые часто не указаны в технических описаниях, но требуют значительных усилий для определения. Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Контроллеры BLDC часто требуют большого количества параметров, зависящих от двигателя, которые часто не указаны в технических описаниях, но требуют значительных усилий для определения. Это также относится к системам, которые не реализуют «настоящее» бездатчиковое управление, а имеют только механизм обнаружения блокировки или упрощенное управление, снижающее номинальный ток двигателя в зависимости от нагрузки. Даже в этих случаях необходимо распознавать и настраивать пороговые значения, зависящие от двигателя.
Бессенсорная система от Nanotec, напротив, работает с очень небольшим количеством параметров, которые на самом деле не обязательно знать пользователю: процедура автоматической настройки измеряет подключенный двигатель и автоматически определяет все необходимые параметры.
В зависимости от типа двигателя информация о скорости и положении поступает в диапазоне от 100 до 250 об/мин. Эта информация столь же точна, как и у оптического энкодера с шагом 500 или 1000. Результирующее управление двигателем имеет такое же качество и крутящий момент, как и управление двигателем с помощью энкодера. Даже ниже этого порогового значения безсенсорное управление все еще работает при температуре прибл. 10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
Даже ниже этого порогового значения безсенсорное управление все еще работает при температуре прибл. 10–25 об/мин. Однако его точность снижается с увеличением скорости, а также падает достижимый крутящий момент.
Напротив, на высоких скоростях бездатчиковая система работает лучше, чем поворотный энкодер, который всегда демонстрирует допуск на биение, что приводит к синусоидальной угловой ошибке. В стандартных энкодерах без собственных подшипников эта ошибка может достигать величины до ±1°, что приведет к вибрациям в замкнутом режиме на более высоких скоростях. С другой стороны, в виртуальных энкодерах ошибка на высоких скоростях имеет тот же порядок, что и погрешность угла шага двигателя (±0,09°). Кроме того, энкодеры всегда выдают цифровые дискретные значения положения. Особенно при низких разрешениях это приводит к колебаниям синхронизации двигателя. Значение виртуального энкодера, напротив, является непрерывным и постоянным.
Управление на основе наблюдателя делает ненужным использование двигателей с очень высокой противо-ЭДС, но недостатком которых является высокая индуктивность и, следовательно, более низкая динамика. Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Наоборот: двигатели с очень малой индуктивностью и малым сопротивлением, а значит и с большим номинальным током, работают намного лучше.
Сочетание разомкнутого и замкнутого контура
Бездатчиковое управление особенно удобно для шаговых двигателей, поскольку его можно использовать не только для управления скоростью, но и для позиционирования в сочетании с управлением без обратной связи. Алгоритм без датчиков способен определять точность, с которой в данный момент оценивается скорость. Если сигнал становится слишком неточным при снижении скорости, система автоматически переключается в режим без обратной связи, и позиционирование по-прежнему возможно. Поскольку обычно на низких скоростях в режиме разомкнутого контура проходит всего несколько шагов, резонансы здесь не проблема. При перезапуске из состояния покоя требуется всего несколько градусов, чтобы вернуться в режим с обратной связью. Таким образом, бездатчиковая технология позволяет использовать преимущества ориентированного на поле управления практически во всех традиционных приложениях с шаговыми двигателями.
Шаговые двигатели | Прикладное движение
Что такое шаговый двигатель?
Шаговый двигатель определяется как устройство, нормальное движение вала которого состоит из дискретных угловых перемещений практически одинаковой величины при работе от последовательно переключаемого источника питания постоянного тока.
Шаговый двигатель представляет собой цифровое устройство ввода-вывода. Он особенно хорошо подходит для приложений, в которых управляющие сигналы представлены в виде цифровых импульсов, а не аналоговых напряжений. Один цифровой импульс на привод шагового двигателя или транслятор заставляет двигатель увеличивать угол движения на один точный угол. По мере увеличения частоты цифровых импульсов шаговое движение превращается в непрерывное вращение.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей, хотя в промышленной автоматизации наиболее распространенным типом является гибридный тип:
- Активный ротор: постоянный магнит (PM)
- Реактивный ротор: переменное сопротивление (VR)
- Комбинация PM и VR: гибрид (HY)
Applied Motion Products в основном предлагает шаговые двигатели гибридного типа с углом шага 1,8°.
Тип с постоянным магнитом
Этот тип шагового двигателя имеет ротор с постоянным магнитом. Статор может быть аналогичен статору обычного 2- или 3-фазного асинхронного двигателя или иметь конструкцию, аналогичную штампованному двигателю. Последний тип является наиболее популярным.
A) Обычный тип с постоянными магнитами. На рис. 1 показана схема обычного шагового двигателя с ротором на постоянных магнитах. Показана двухфазная обмотка. На рис. 1а показана фаза А, на которую подается напряжение с положительной клеммой «А». Поле находится под углом 0°. Когда катушка намотана, как показано, северный полюс ротора также находится под углом 0°. Ступени двигателя указаны в Таблице I.
ТАБЛИЦА I
| Ступень | Положение Ротор и Вал | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | |||||||
| phase | phase | ||||||||||
| A | A’ | B | B’ | ||||||||
| 0 | 0 | 0 | + | — | OFF | OFF | 1A | ||||
| 1 | 9082 | OFF | OFF | + 9082 | OFF | OFF | + 9082 | . 0082 0082 | — | 1b | |
| 2 | 180 | 180 | — | + | off | off | 1c | ||||
| 3 | 270 | 270 | off | off | — | + | 1d | ||||
Вал совершает один оборот на каждый полный оборот электромагнитного поля в этом двигателе.
На рис. 2 показан тот же двигатель с обеими обмотками под напряжением. Важным отличием здесь является то, что результирующее электромагнитное поле находится между двумя полюсами. На рис. 2 поле сместилось на 45° относительно поля на рис. 1. В таблице II показана последовательность включения питания и положения ротора.
TABLE II
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | ||||||||||||
| phase | phase | |||||||||||||||
| A | A | B | B ‘ | |||||||||||||
| 0 | 45 | 45 | + | — | + | — | 2A | + | — | 2A | + | — | 2A | + | — | 2A0082 |
| 1 | 135 | 135 | — | + | + | — | 2b | |||||||||
| 2 | 225 | 225 | — | + | — | + | 2c | |||||||||
| 3 | 315 | 315 | + | — | — | + | 2d | |||||||||
As in the one-phase-on energizing scheme, the shaft completes one revolution for каждый полный оборот электромагнитного поля.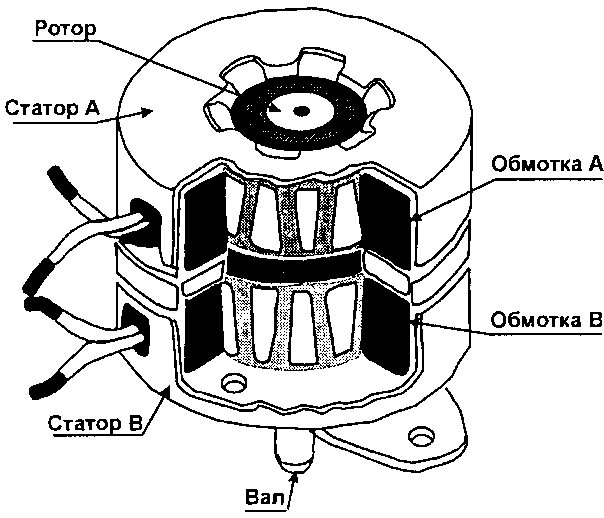
Должно быть очевидно, что этот двигатель может работать на полшага; т. е. шаг с небольшим шагом. Это возможно путем объединения подачи питания, показанной на рис. 1, с показанной на рис. 2. На рис. 3 показаны схемы двигателя с полушаговым движением ротора. Последовательность включения и положение ротора показаны в таблице III.
ТАБЛИЦА III
| Ступень | Положение Ротор и Вал | (Механические градусы) Электромагнитный Field | Energization | Figure | |||
| phase | phase | ||||||
| A | A’ | B | B’ | ||||
| 0 | 0 | 0 | + | — | off | off | 3a |
| 1 | 45 | 45 | + | — | + | — | 3b |
| 2 | 90 | 90 | off | off | + | — | 3c |
| 3 | 135 | 135 | — | + | + | — | 3d |
Как и на предыдущих диаграммах, ротор и вал перемещаются под тем же углом, что и поле. Обратите внимание, что каждый шаг приводил к повороту на 45° вместо 90° на предыдущей диаграмме.
Обратите внимание, что каждый шаг приводил к повороту на 45° вместо 90° на предыдущей диаграмме.
Шаговый двигатель с постоянными магнитами может иметь бифилярную обмотку, чтобы избежать необходимости менять полярность обмотки. На рисунке 4 показана бифилярная обмотка, а в таблице IV показана последовательность подачи питания.
TABLE IV
2
3
3
9082
9084
9084
4444444444444444444444444444. Требуется меньше переключающих транзисторов.
B) Штампованный или шаговый двигатель с постоянными магнитами. Наиболее популярным типом шагового двигателя с постоянными магнитами является так называемый штампованный тип, зубчатый венец, листовой металл, жестяная банка или просто недорогой шаговый двигатель. Этот двигатель трудно четко проиллюстрировать из-за того, как он сконструирован. Вырез на рис. 5 — это попытка показать, как выглядит этот тип шагового двигателя с постоянными магнитами. Двигатель показан с обеими фазами под напряжением. Ротор показан с 12 полюсами, что дает 24 шага на оборот с углом шага 15°. Схематическая диаграмма шагового двигателя с постоянными магнитами того типа, который показан на рисунке 5, показана на рисунке 6.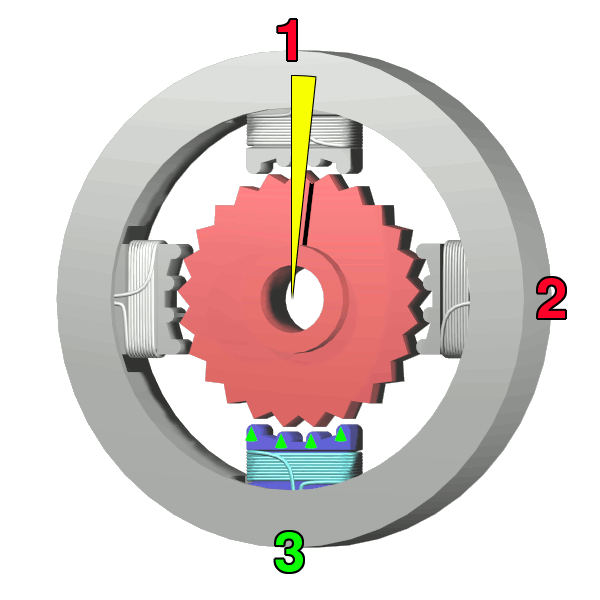 Этот двигатель имеет пару катушек, окружающих ротор с постоянными магнитами. Катушки заключены в корпус из мягкого железа с зубьями внутри, взаимодействующими с ротором. Каждый корпус катушки имеет такое же количество зубцов, как и количество полюсов ротора. Корпуса смещены друг относительно друга в радиальном направлении на половину шага зубьев.
Этот двигатель имеет пару катушек, окружающих ротор с постоянными магнитами. Катушки заключены в корпус из мягкого железа с зубьями внутри, взаимодействующими с ротором. Каждый корпус катушки имеет такое же количество зубцов, как и количество полюсов ротора. Корпуса смещены друг относительно друга в радиальном направлении на половину шага зубьев.
PM step motors are available with the following step angles:
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | ||||||||||
| phase | phase | |||||||||||||
| A | B | C | D | |||||||||||
| 0 | 0 | 0 | on | off | off | off | 4a | |||||||
| 1 | 90 | 90 | OFF | OFF | на | OFF | 4B | |||||||
| 2 | 180 | 180 | OFF | на | 180 | OFF | на | OFF | ON | на | . 0103 OFF 0103 OFF | 4C | ||
| 3 | 270 | 270 | OFF | OFF | OFF | на | 4D | |||||||
| на | 4D | |||||||||||||
| на | 4D | |||||||||||||
| Step Angle Degrees | Steps Per Revolution |
| 1.8 | 200 |
| 3.6 | 100 |
| 3.75 | 96 |
| 7,5 | 48 |
| 40 | |
| 10 | 36 |
| 11.2555 | |
| 11.255592 | |
| 11.255592 | |
| 11.2555 | |
| 110082 | |
| 110082 3 | |
| 0103 32 | |
| 15 | 24 |
| 18 | 20 |
22. 5 5 | 16 |
| 30 | 12 |
| 45 | 8 |
| 90 | 4 |
Тип с переменным сопротивлением
Шаговый двигатель этого типа имеет электромагнитный статор с ротором из магнитомягкого железа, имеющим зубья и пазы, подобные ротору индукторного генератора переменного тока. В то время как двигатели с постоянными магнитами в основном являются 2-фазными машинами, для двигателей VR требуется как минимум 3 фазы. Большинство шаговых двигателей VR имеют 3 или 4 фазы, хотя доступны и 5-фазные двигатели VR.
Схема трехфазного двигателя VR показана на рис. 7. Показанный двигатель имеет 12 зубьев статора, 8 зубьев ротора и угол шага 15°. The energization sequence is shown in Table V.
TABLE V
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization Phase | ||
| A | B | С | |||
| 0 | 15 | 60 | on | off | off |
| 1 | 30 | 120 | off | on | off |
| 2 | 45 | 180 | off | OFF | на |
| 3 | 60 | 240 | на | OFF | OFF |
В VR STEP, на поле, поля.
На рис. 8 показана схема 4-фазного шагового двигателя с углом поворота 15°, при этом одна фаза находится под напряжением. Диаграмма возбуждения показана в Таблице VI.
TABLE VI
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Phases | |||
| A | B | C | D | |||
| 0 | 15 | -45 | on | off | off | off |
| 1 | 30 | -90 | off | on | off | off |
| 2 | 45 | -135 | off | off | on | off |
| 3 | 60 | 135 | off | off | off | on |
Обратите внимание на вращение электромагнитного поля. Поле совершает большой скачок во вращении между шагами 2 и 3. Это характерно для двигателя, подключенного таким образом. На рис. 9 показан этот двигатель с двумя фазами, включенными одновременно. Вращение поля остается прежним. Способ исправить это показан на схеме на рисунке 10. Схемы на рисунках 8 и 9 иллюстрируют обмотки, соединенные 4N и 4S. Это указывает на магнитные полюса, когда они находятся под напряжением. Соединение катушки, показанное на рисунке 10, представляет собой симметричное соединение, называемое N-S-N-S из-за полярности катушки. Обратите внимание, что катушка фазы А имеет два южных полюса и не имеет северных полюсов для пути возврата потока. Вы можете быть уверены, что он будет. Поток будет возвращаться по пути наименьшего сопротивления, а именно через пары полюсов, ближайшие к двум зубьям ротора. Это зависит от положения ротора. Поток индуцирует напряжение в катушках, намотанных на полюс. Это индуцирует ток в обмотке, замедляющий ротор. Величина тока определяется напряжением на катушке.
Поле совершает большой скачок во вращении между шагами 2 и 3. Это характерно для двигателя, подключенного таким образом. На рис. 9 показан этот двигатель с двумя фазами, включенными одновременно. Вращение поля остается прежним. Способ исправить это показан на схеме на рисунке 10. Схемы на рисунках 8 и 9 иллюстрируют обмотки, соединенные 4N и 4S. Это указывает на магнитные полюса, когда они находятся под напряжением. Соединение катушки, показанное на рисунке 10, представляет собой симметричное соединение, называемое N-S-N-S из-за полярности катушки. Обратите внимание, что катушка фазы А имеет два южных полюса и не имеет северных полюсов для пути возврата потока. Вы можете быть уверены, что он будет. Поток будет возвращаться по пути наименьшего сопротивления, а именно через пары полюсов, ближайшие к двум зубьям ротора. Это зависит от положения ротора. Поток индуцирует напряжение в катушках, намотанных на полюс. Это индуцирует ток в обмотке, замедляющий ротор. Величина тока определяется напряжением на катушке. Катушка с диодной фиксацией будет иметь больший ток, чем обмотка с резисторным диодом или стабилитроном. На рисунке 11 показана схема 4-фазного шагового двигателя VR с подключением N-S-N-S и двумя фазами, находящимися под напряжением. Обратите внимание на короткий путь потока между полюсами.
Катушка с диодной фиксацией будет иметь больший ток, чем обмотка с резисторным диодом или стабилитроном. На рисунке 11 показана схема 4-фазного шагового двигателя VR с подключением N-S-N-S и двумя фазами, находящимися под напряжением. Обратите внимание на короткий путь потока между полюсами.
Часто необходимо уменьшить угол шага без использования зубчатого зацепления. Один из методов заключается в удвоении количества зубьев ротора и статора. Если бы двигатель был сконструирован так, как показано на рис. 7, зубья были бы тонкими и их было бы трудно заводить. Лучший способ сделать это показан на рисунке 12. Количество полюсов ротора и статора уменьшено.
На рис. 13 показана схема шагового двигателя с переменным сопротивлением с шагом 5°. Диаграмма двигателя VR с шагом 1,8° показана на рис. 14.
Двигатели с переменным некачественным.
7,5 48 15 24Гибридный тип
Этот тип двигателя часто называют двигателем с постоянными магнитами. Он использует комбинацию постоянного магнита и структуры с переменным магнитным сопротивлением. Его конструкция аналогична асинхронному двигателю. На рис. 15 показан упрощенный тип гибридного двигателя, иллюстрирующий его конструкцию. Ротор имеет две концевые детали (хомуты) с выступающими полюсами, расположенными на равном расстоянии друг от друга, но радиально смещенными друг от друга на половину шага зубьев. Их разделяет круглый постоянный магнит. Ярма имеют практически равномерный поток противоположной полярности. Статор изготовлен из многослойной стали. Двигатель, показанный на рисунке 15, имеет 4 катушки, расположенные в две группы по 2 катушки последовательно. Одна пара катушек называется фазой A, а другая — фазой B. Для показанного двигателя каждый полюс имеет один зубец.
Он использует комбинацию постоянного магнита и структуры с переменным магнитным сопротивлением. Его конструкция аналогична асинхронному двигателю. На рис. 15 показан упрощенный тип гибридного двигателя, иллюстрирующий его конструкцию. Ротор имеет две концевые детали (хомуты) с выступающими полюсами, расположенными на равном расстоянии друг от друга, но радиально смещенными друг от друга на половину шага зубьев. Их разделяет круглый постоянный магнит. Ярма имеют практически равномерный поток противоположной полярности. Статор изготовлен из многослойной стали. Двигатель, показанный на рисунке 15, имеет 4 катушки, расположенные в две группы по 2 катушки последовательно. Одна пара катушек называется фазой A, а другая — фазой B. Для показанного двигателя каждый полюс имеет один зубец.
Количество полных шагов на революцию может быть определена из следующей формулы:
5
5
5
5
5
5
5
5
5
2
| SPR = N R X Ø | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Где: | SPR = число из ступеней FEREN | , где: | SPR = Количество по этапам FORE FOR FARE | 995 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
SPR = Количество. | N R = общее количество зубьев ротора (всего для обоих хомутов) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Ø = количество фаз двигателя показанный на рисунке 15, имеет обмотку диаметром 2 и ротор с 5 зубьями на ярмо, всего 10 зубьев. Рассчитайте количество шагов/об. SPR = 10 x 2 = 20 шагов/об Угол шага можно найти по следующей формуле:
Пример: Вычислите угол шага для приведенного выше двигателя. SA = 360/20 = 18° Угол шага можно рассчитать напрямую, не зная количества фаз, если известно количество зубьев статора и зубцов на полюс. На рис. 15 показано по одному зубу на полюс и всего 4 зубца на статоре. 9095 9544444444444444444444444444444444444444018. Обратите внимание, что и здесь необходимо использовать теоретическое количество зубьев. Обычно легко визуально определить, остался ли один или два зуба между полюсами. Пример. Двигатель на рис. 15 имеет 5 зубьев на каждой вилке ротора и по одному зубцу на полюс, всего 4 зубца.
Figure 16 показывает вращение вала при двухфазном включении. Последовательность переключения, вращение поля и вращение выходного вала показаны в Таблице VII. TABLE VII03010103010101010101010101082 + +
На рис. Гибридные шаговые двигатели доступны со следующими углами шага: 0103 5
Первоначально эта статья появилась в каталоге Applied Motion Products «Motor-Drives-Controls» в 1997 году. Советы по проектированию
Советы по установке Motion
Точность (шаг) Осевой люфт Бифилярная (намотка) Двухуровневый привод (двухуровневый привод) Биполярный привод Привод с прерывателем Контроллер (шаговый двигатель) Момент фиксации Драйвер или привод Рабочий цикл Осевой люфт Трение (кулон) Трение (вязкое) Удерживающий крутящий момент (статический крутящий момент) Гибридный шаговый двигатель (HY) Гистерезис (позиционный) Индексатор Индуктивность (взаимная) Индуктивность (собственная) Мгновенная скорость пуска-останова Привод L/R Максимальная скорость реверсирования Максимальная скорость нарастания Микрошаг Осциллятор Перерегулирование Шаговый двигатель с постоянными магнитами (PM) Точность позиционирования Скорость срабатывания (коэффициент срабатывания) Втягивающий момент Момент вытягивания Частота импульсов Радиальный люфт Скорость отклика (частота срабатывания) Время установления Опрокидывающий момент (удерживающий или статический момент) Угол шага Частота шагов (скорость) Пошаговая точность Коммутирующий усилитель Последовательность переключения (последовательность включения) Тепловое сопротивление Тепловая постоянная времени Кривая смещения крутящего момента Градиент крутящего момента (жесткость) Униполярный привод Шаговый двигатель с переменным сопротивлением (VR) Вязкостное демпфирование Вязкоинерционный демпфер | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 часто изготавливаются с одним или двумя зубьями между каждым полюсом, чтобы облегчить намотку двигателя и уменьшить утечку потока между полюсами. Эта формула требует использования теоретического числа зубьев.
часто изготавливаются с одним или двумя зубьями между каждым полюсом, чтобы облегчить намотку двигателя и уменьшить утечку потока между полюсами. Эта формула требует использования теоретического числа зубьев. 17 показан гибридный шаговый двигатель 5°. Обратите внимание, что ротор имеет 18 зубьев на каждом кольце, всего 36 зубьев. Широко распространенная гибридная диаграмма 1,8° показана на рис. 18.
17 показан гибридный шаговый двигатель 5°. Обратите внимание, что ротор имеет 18 зубьев на каждом кольце, всего 36 зубьев. Широко распространенная гибридная диаграмма 1,8° показана на рис. 18.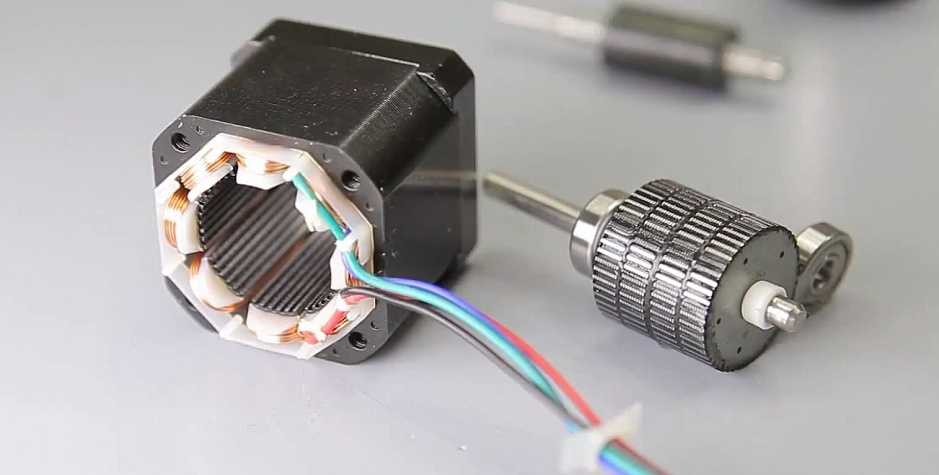

 Не включает ошибки из-за гистерезиса.
Не включает ошибки из-за гистерезиса. Биполярные приводы могут использоваться с 4-, 6- или 8-проводными двигателями. С 4- и 8-проводными двигателями биполярные приводы обычно более эффективны, чем однополярные.
Биполярные приводы могут использоваться с 4-, 6- или 8-проводными двигателями. С 4- и 8-проводными двигателями биполярные приводы обычно более эффективны, чем однополярные.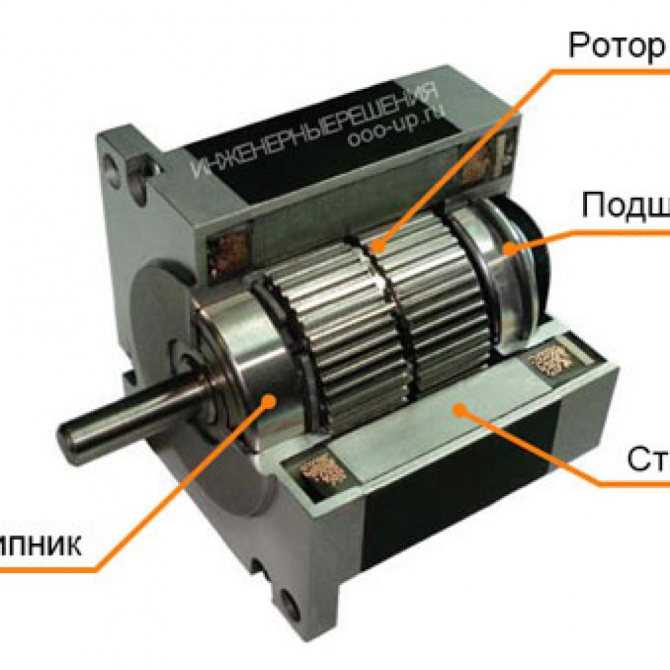
 Наиболее распространенными разрешениями микрошагов являются 10, 25 и 50 шагов на полный шаг, но доступно множество разрешений от 2 до 256 микрошагов на полный шаг.
Наиболее распространенными разрешениями микрошагов являются 10, 25 и 50 шагов на полный шаг, но доступно множество разрешений от 2 до 256 микрошагов на полный шаг.

 Некоторые усилители (типы ШИМ) переключаются с постоянной частотой и регулируют рабочий цикл для управления током. Другие типы имеют фиксированное время отключения и регулируют частоту.
Некоторые усилители (типы ШИМ) переключаются с постоянной частотой и регулируют рабочий цикл для управления током. Другие типы имеют фиксированное время отключения и регулируют частоту.