Схемы управления шаговыми двигателями
-
6-ти выводные шаговые двигатели -
8-ми выводные шаговые двигатели
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
— в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.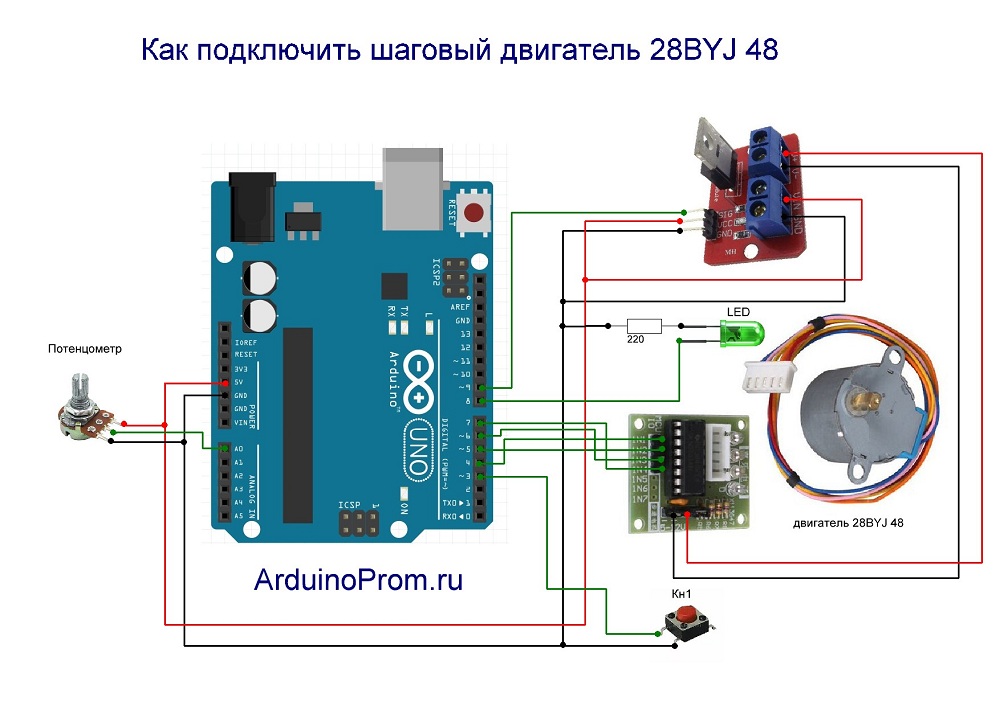 2 * R = Iбиполяр.2 * 2* R, откуда
2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
|
Параметр |
Значение |
|---|---|
|
Ток обмотки, А |
Iбиполяр.= 0.707 * Iуниполяр. |
|
Сопротивление обмотки, Ом |
Rбиполяр.  = 2 * Rуниполяр. = 2 * Rуниполяр. |
|
Индуктивность обмотки, мГн |
Lбиполяр. = Lуниполяр. |
|
Крутящий момент, кг×см |
Tбиполяр. = 1.4 * Tуниполяр. |
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение шагового двигателя (схема электрическая)
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др.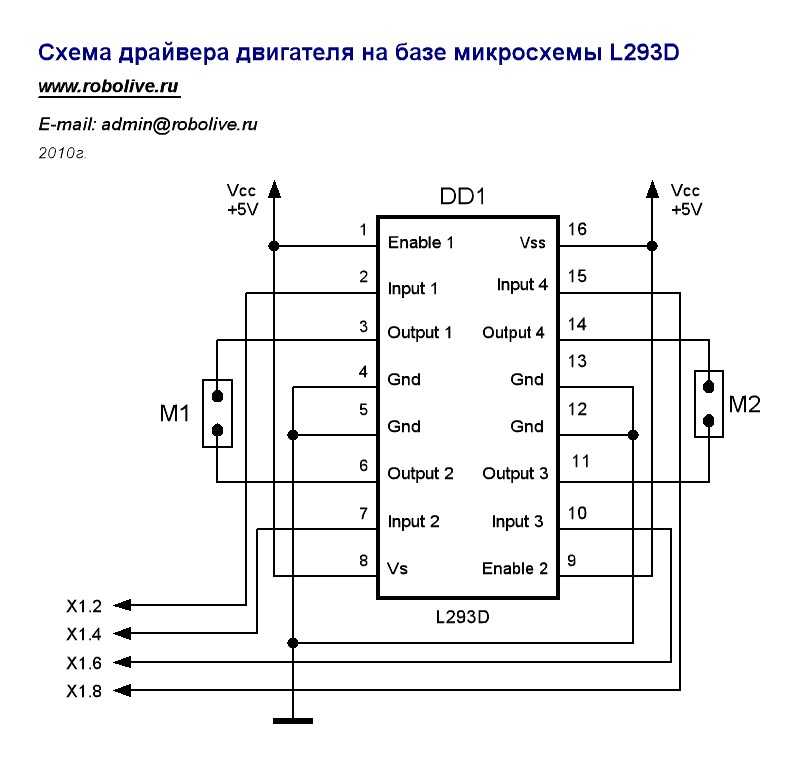 — в этом случае равны данным, приведенным в каталоге.
— в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение шагового двигателя (схема электрическая)
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед. 2 * 2 * R
2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
|
Параметр |
Значение |
|---|---|
|
Ток обмотки, А |
Iбиполяр.  = 0.707 * Iуниполяр. = 0.707 * Iуниполяр. |
|
Сопротивление обмотки, Ом |
Rбиполяр. = 2 * Rуниполяр. |
|
Индуктивность обмотки, мГн |
Lбиполяр. = Lуниполяр. |
|
Крутящий момент, кг×см |
Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение шагового двигателя (схема электрическая)
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
= 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
|
Параметр |
Значение |
|---|---|
|
Ток обмотки, А |
Iбиполяр.= 1.4 * Iуниполяр. |
|
Сопротивление обмотки, Ом |
Rбиполяр.. = 0.5 * Rуниполяр. |
|
Индуктивность обмотки, мГн |
Lбиполяр.. = 4 * Lуниполяр. |
|
Крутящий момент, кг×см |
Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
|
Параметр |
униполярное |
параллельное |
последовательное |
|---|---|---|---|
|
Ток/ фаза, А |
2 |
2.  8 8 |
1.4 |
|
Сопротивление обмотки, Ом |
1.5 |
0.75 |
3 |
|
Индуктивность обмотки, мГн |
3 |
1.5 |
6 |
|
Крутящий момент, кг×см |
22 кг х см |
31 кг х см |
31 кг х см |
|
Преимущества / недостатки |
Средний момент при среднем энергопотреблении |
Высокий момент при высоком потреблении тока |
Высокий момент на низких скоростях при низком энергопотреблении |
|
Максимальная эффективность |
средний скоростной диапазон |
высокоскоростной диапазон |
низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
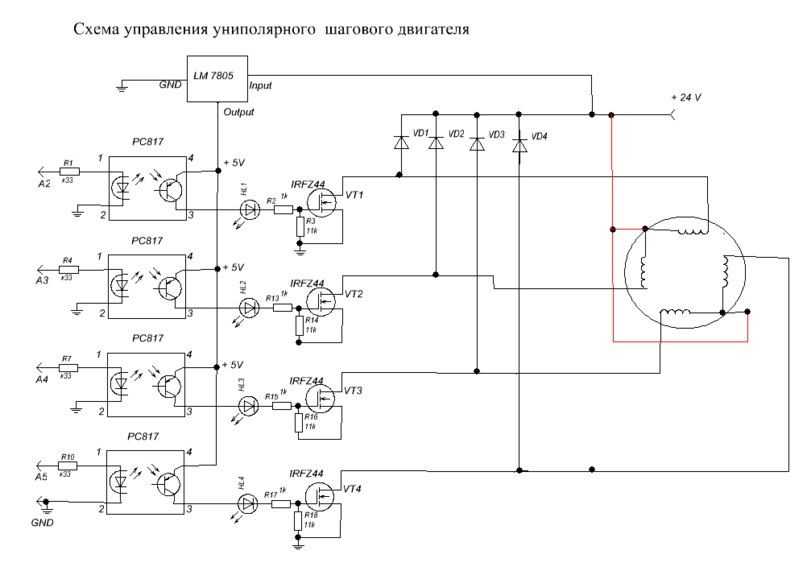
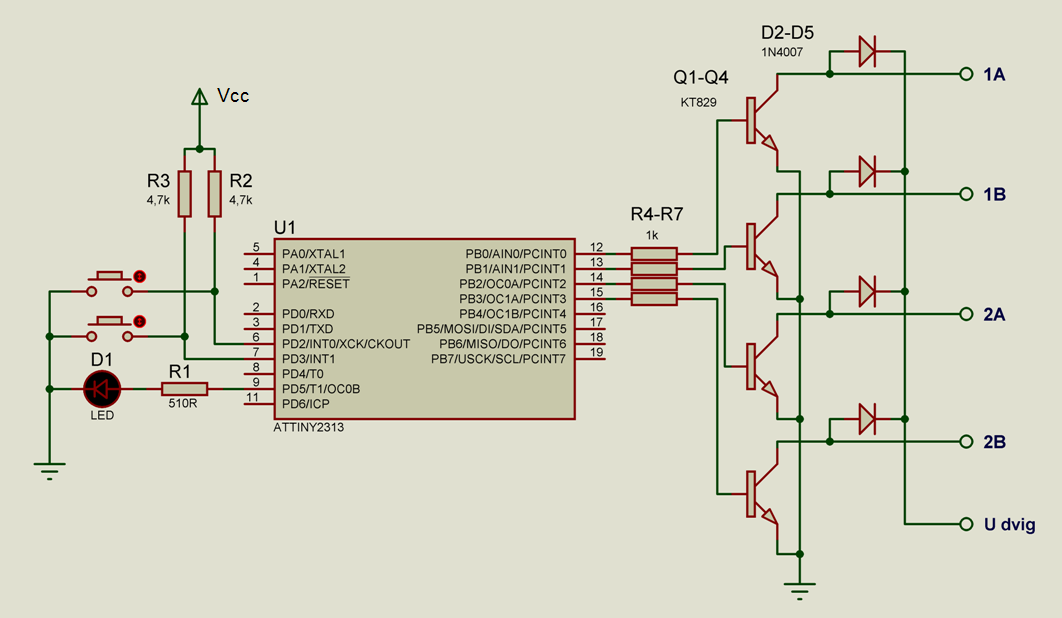
Схема подключения биполярного шагового двигателя
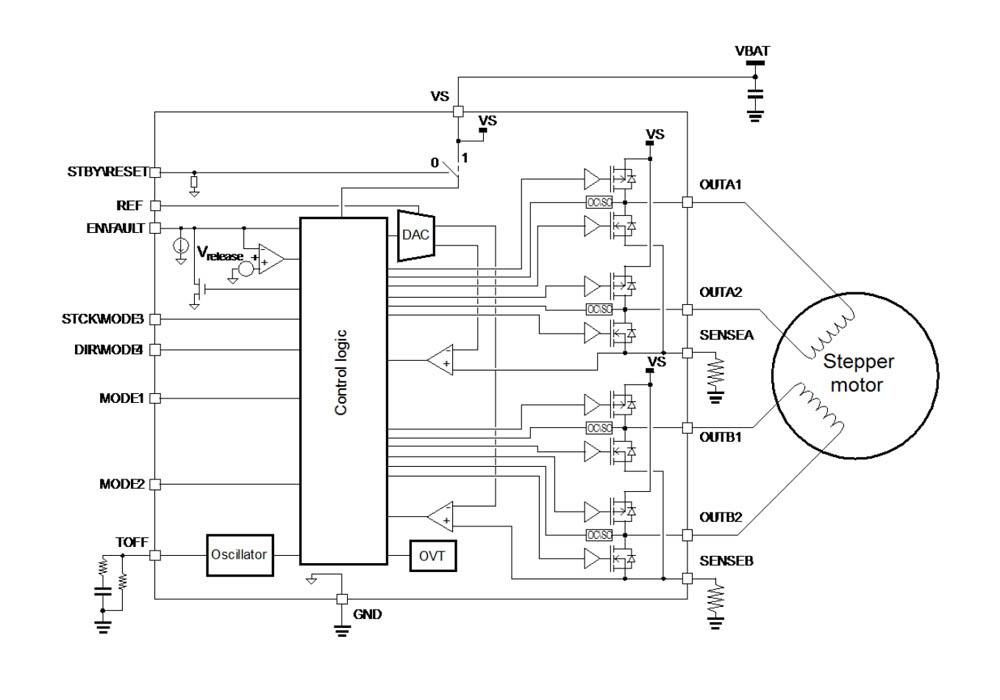
Для управления шаговыми двигателями используют специальные устройства — драйверы шаговых двигателей.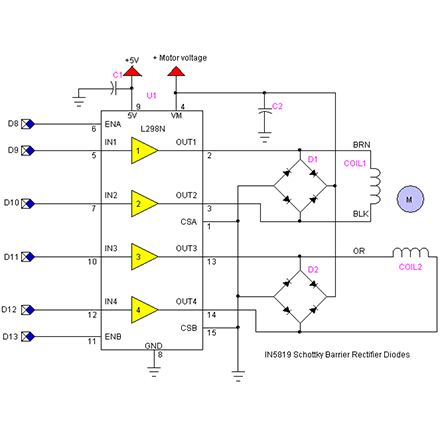 Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4. Схема подключения для управления скоростью и направлением движения. База знаний. Вконтакте Instagram YouTube.
Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4. Схема подключения для управления скоростью и направлением движения. База знаний. Вконтакте Instagram YouTube.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Шаговые двигатели и особенности их применения
- Схемы подключения шаговых двигателей.
- Шаговый двигатель
- Драйвер шагового двигателя A4988
- Как подключить шаговый двигатель с 6 выводами
- Главное меню
- Шаговые двигатели (подробный разбор 4 типов)
- Как работает шаговый электродвигатель?
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Подключаем униполярные шаговые двигатели
Шаговые двигатели и особенности их применения
В этой статье мы поговорим о шаговых двигателях в проектах ардуино. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье.
Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора.
Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.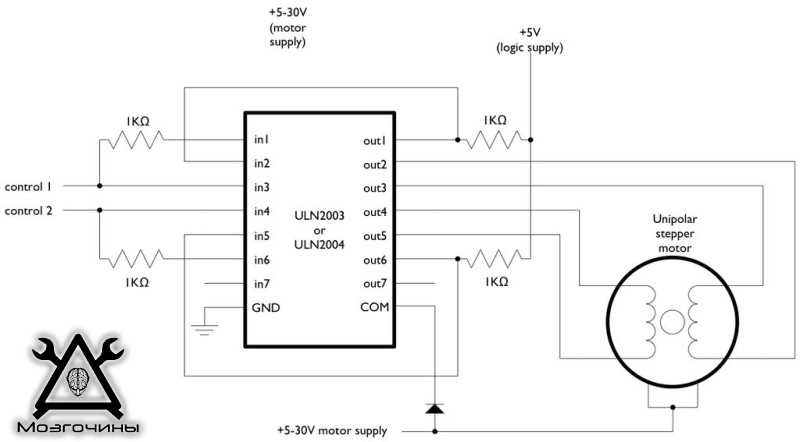 Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию.
Работа двигателя осуществляется следующим образом — в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота шаги , направление движения задаются в программе для микроконтроллера.
Драйвер — это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйвер LN. Работа двигателя в биполярном режиме имеет несколько преимуществ:.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия — подключение к источнику питания, отключение.
Для такой коммутации используется схема-мост с четырьмя ключами. Самым распространенным драйвером является микросхема LN. Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера LN состоит из микросхемы LN, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов. Этот драйвер обеспечивает все необходимые функции и режимы.
В качестве платы будет использоваться Arduino Uno. Схема подключения изображена на рисунке ниже. В данном случае используются цифровые контакты Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино. Подключение биполярного двигателя через драйвер L выглядит похожим образом.
В качестве шагового двигателя используется Nema Nema 17 — биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия хHSхххА мотора является универсальной.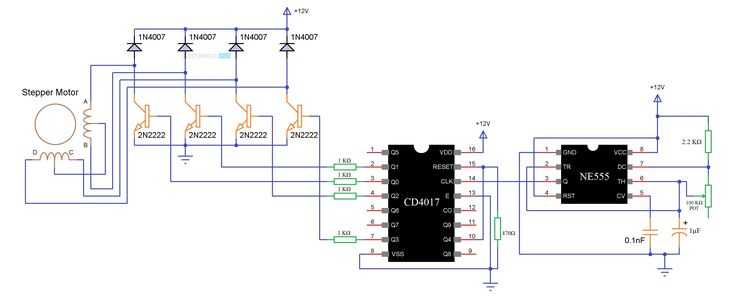
Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах. Основные функции в этой библиотеке:. В наборе примеров библиотеки Stepper. В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя.
Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в свой проект Arduino. Любая разработка начинается с выбора компонентов.
При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя. Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1. Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере.
То вы скорее всего будите использовать двигателя из принтеров. Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам Ln и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель. Расположение обмотки для данного двигателя вот такое. Если у двигателя 5 выводов, это униполярный шаговый двигатель. Вот так выгладит его схема. Наши драйвера рассчитаны на двигателя с 4 выводами.
Как быть? Как их подключить? Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки R — именно оно приведено в каталоге.
При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза 2R. Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки.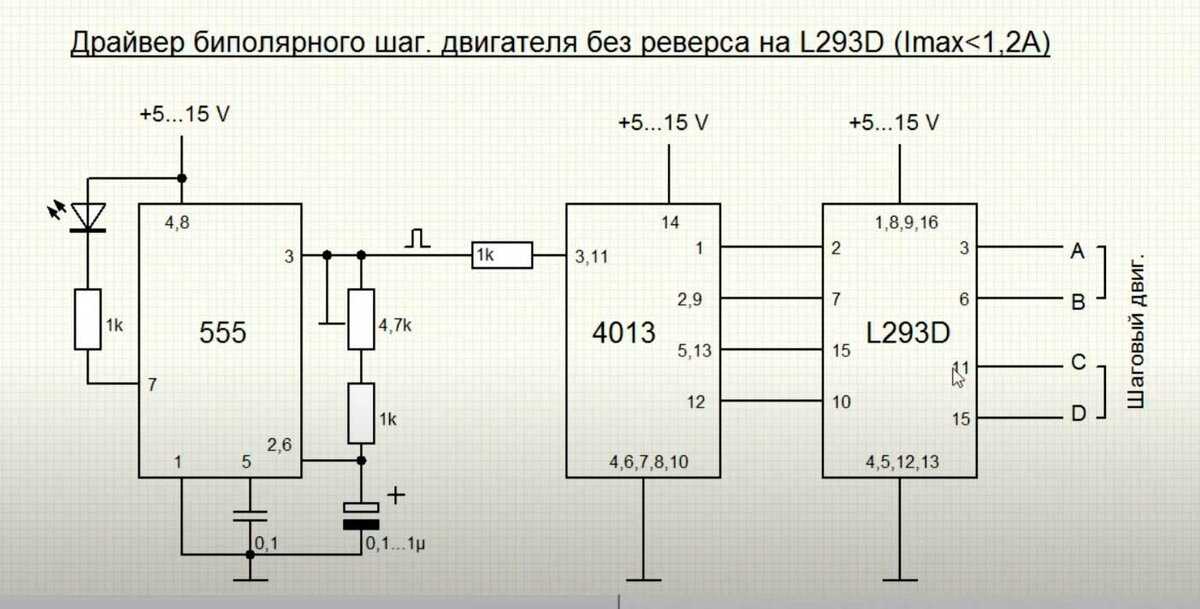 Во втором случае момент более стабилен на высоких частотах.
Во втором случае момент более стабилен на высоких частотах.
Параметры ШД при таком подключении соответствуют заявленным в datasheet, момент, ток , момент более стабилен на высоких частотах. Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно. Подключение А — шаговик работает с характеристиками, заявленными в описании момент, ток , момент более стабилен на высоких частотах. Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают.
Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже. Настраивать СNC shield будем в следующей статье.
Не пропустите! Вернуться в раздел: Проекты на Arduino Дата публикации 15 июня , Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое.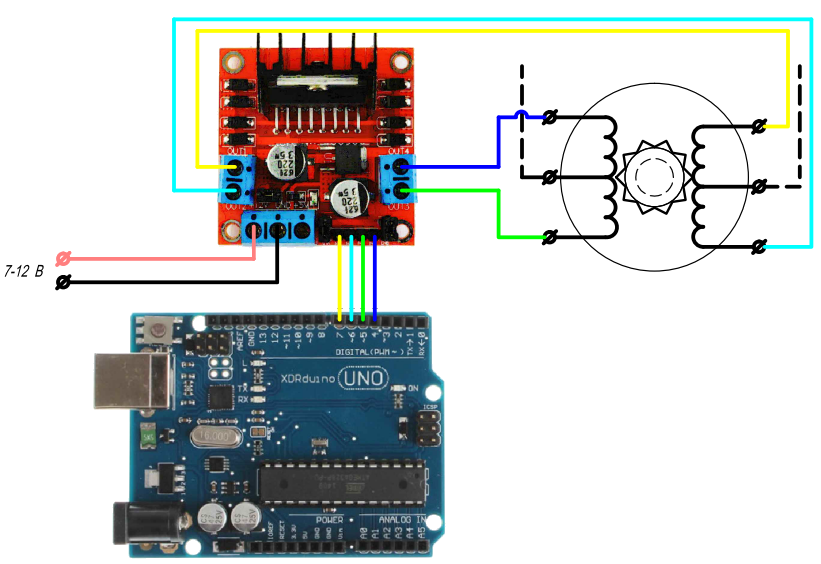 На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов.
На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов.
Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя ШД. Доброго дня уважаемые друзья, коллеги, будущие партнёры и гости. Я снова на связи. С вами Гридин Семён. Сегодня мы рассмотрим интересную тему. Это соединение шагового двигателя с популярной электронной платой Arduino. Так что готовьте чай и читайте статью. Для практических задач с точным перемещением объекта обязательно требуется ШД.
Это мотор, который перемещает свой вал в зависимости от заданных шагов в программе контроллера. Чаще всего их применяют в станках ЧПУ, робототехнике, манипуляторах, 3D-принтерах. Он достаточно дешёвый, прост в сборке и легко писать программу.
В 4-шаговом режиме он может совершать шагов, в 8-шаговом шагов. Питание 5 В, ток потребления мА. Передаточное число , то есть один шаг он совершит на 5, градусов.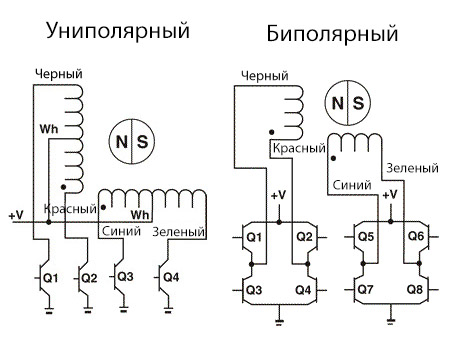 Крутящий момент составляет 34 мН. Его главным преимуществом является дешевизна и простота. Прилагаю спецификацию:.
Крутящий момент составляет 34 мН. Его главным преимуществом является дешевизна и простота. Прилагаю спецификацию:.
Схемы подключения шаговых двигателей.
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т. Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Шаговые двигатели (stepper motors или stepping motors) — это одна из .. вариант, так как в первоисточнике имеются ошибки в подключении IC1. Как уже . Схема платы управления для мощного биполярного шагового двигателя.
Шаговый двигатель
В статье рассматриваются типы шаговых двигателей, особенности их применения и схемы несложных устройств управления, позволяющие оценить возможности и освоить этот тип двигателей на практике.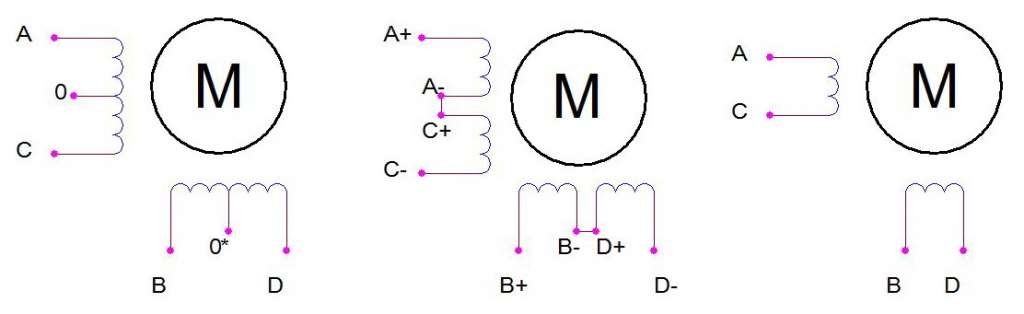 Статья написана на основании опыта автора по использованию шаговых двигателей в робототехнике. А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров. При этом подсчитываются импульсы ЭДС, генерируемые обмоткой двигателя при вращении его ротора внешней силой. Таким образом, момент, развиваемый двигателем, зависит только от параметров обмоток. Статор гибридного двигателя также имеет зубцы, обеспечивая большее количество эквивалентных полюсов, на которых расположены обмотки. В униполярном двигателе рис. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, переключением ее половинок.
Статья написана на основании опыта автора по использованию шаговых двигателей в робототехнике. А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров. При этом подсчитываются импульсы ЭДС, генерируемые обмоткой двигателя при вращении его ротора внешней силой. Таким образом, момент, развиваемый двигателем, зависит только от параметров обмоток. Статор гибридного двигателя также имеет зубцы, обеспечивая большее количество эквивалентных полюсов, на которых расположены обмотки. В униполярном двигателе рис. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, переключением ее половинок.
Драйвер шагового двигателя A4988
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации.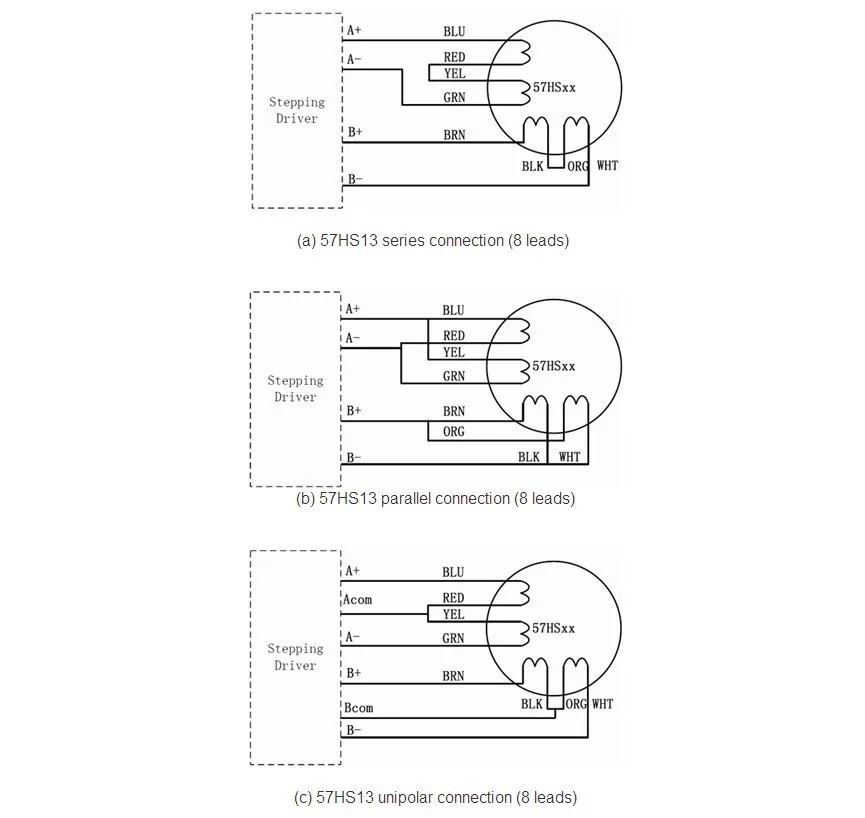 Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение.
Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение.
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами дискретно. Полный оборот ротора состоит из нескольких шагов.
Как подключить шаговый двигатель с 6 выводами
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух реже четырех обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения. В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции.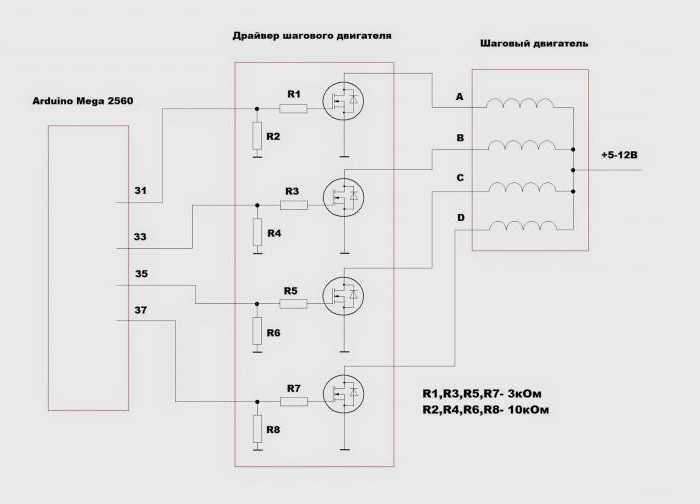
Главное меню
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой. Категории: Электродвигатели и их применение , Схемы на микроконтроллерах Количество просмотров: Комментарии к статье: 0. Ардуино и шаговый двигатель: основы, схемы, подключение и управление. Шаговые двигатели используют для управления положением чего-либо, или для вращения рабочего узла с заданной скорости и на заданный угол.
Виды шаговых двигателей ШД по конструкции обмоток делят на три основных группы по схеме подключения обмоток: 1. Биполярные. 2. Униполярные.
Шаговые двигатели (подробный разбор 4 типов)
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники.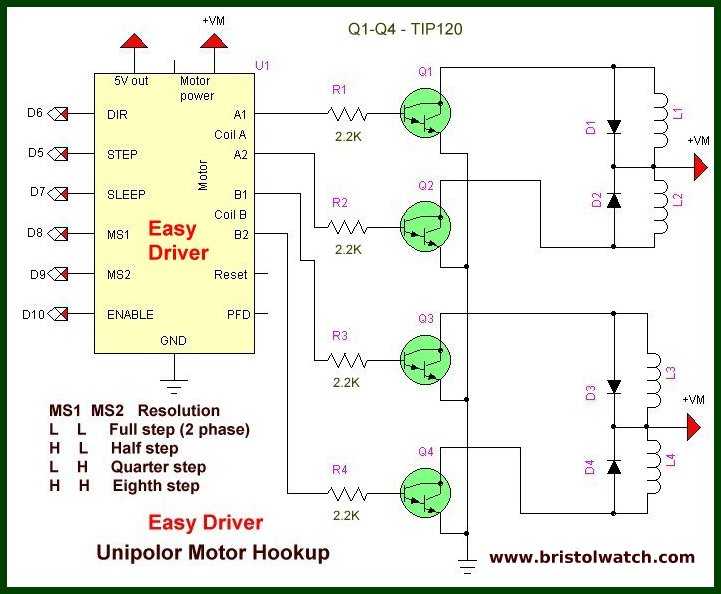 Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора.
Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора.
Как работает шаговый электродвигатель?
ВИДЕО ПО ТЕМЕ: Переделка шагового двигателя в обычный биполярный
С помощью драйвера LN подключим к плате Ардуино биполярный шаговый двигатель. Для управления будем использовать программы из предыдущих уроков для униполярных двигателей. У биполярного шагового двигателя две обмотки, по одной для каждой фазы. Если для управления униполярным двигателем достаточно 4 ключей, замыкающих выводы на землю, то биполярный привод требует более сложной коммутации обмоток.
Предшественником шагового двигателя является серводвигатель. Шаговые импульсные двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи.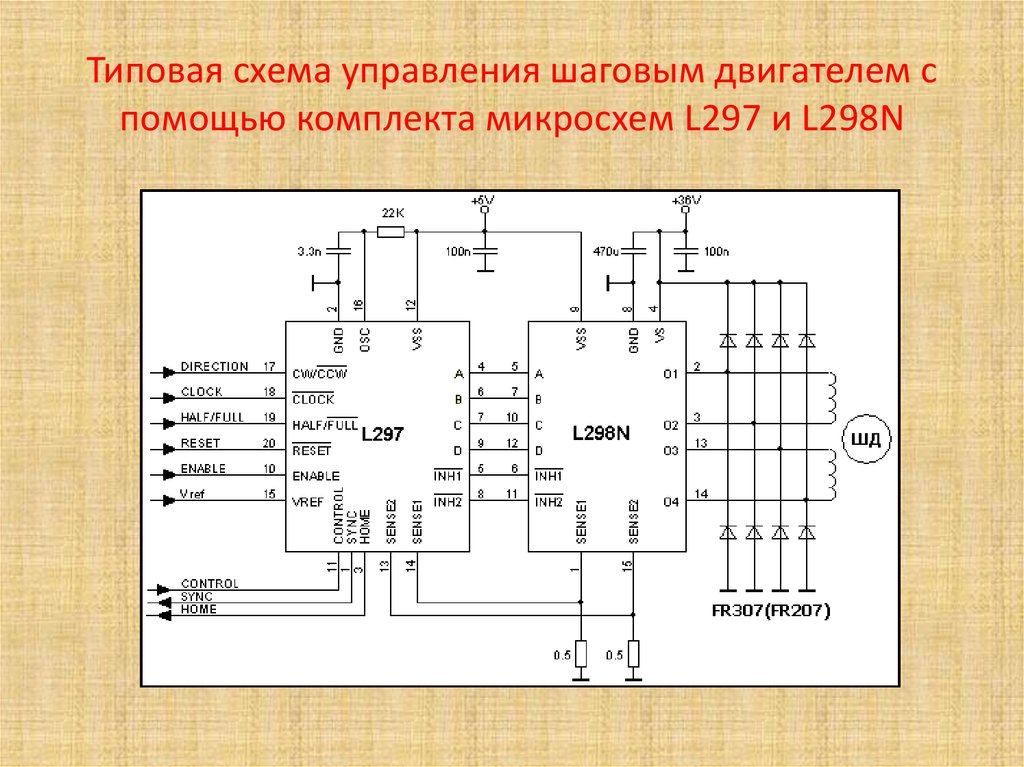
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают. Это означает, что он преобразует электрическую энергию в механическую. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами отсюда и их название.
Перейти к содержимому. У вас отключен JavaScript. Некоторые возможности системы не будут работать. Пожалуйста, включите JavaScript для получения доступа ко всем функциям.
: однополярный и биполярный
Простой способ изменить характеристики скорости и крутящего момента шагового двигателя — подключить его к другому типу драйвера или изменить конфигурацию его проводки. Однако это еще не все. Знание плюсов и минусов между «униполярным» и «биполярным» может улучшить или испортить производительность вашего шагового двигателя.
Однако это еще не все. Знание плюсов и минусов между «униполярным» и «биполярным» может улучшить или испортить производительность вашего шагового двигателя.
Давайте посмотрим на эти две разные кривые скорость-крутящий момент. Эти кривые фактически генерируются одним и тем же «базовым» двигателем, но с разными драйверами. Обратите внимание, как меняются характеристики скорости и крутящего момента. СОВЕТ: выберите определенную скорость, затем сравните крутящий момент на этой скорости.
| Шаговый двигатель NEMA 23 с биполярным драйвером | Шаговый двигатель NEMA 23 с униполярным драйвером |
Кривая скорости и крутящего момента отображает рабочие характеристики шагового двигателя с заданным набором напряжения, тока и типа драйвера и используется для определения того, будет ли двигатель соответствовать требованиям к крутящему моменту и скорости для приложения.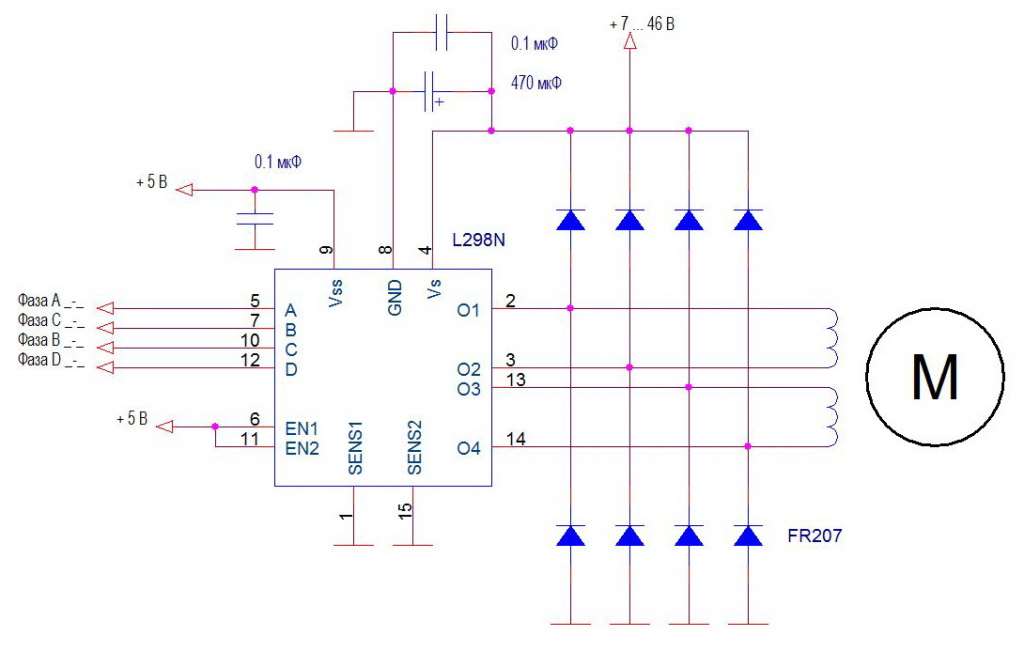 На форму кривой скорости и крутящего момента влияют электрические характеристики двигателя, такие как ток или индуктивность.
На форму кривой скорости и крутящего момента влияют электрические характеристики двигателя, такие как ток или индуктивность.
ОБЗОР: Как создается крутящий момент?
Во-первых, давайте начнем с самого начала и рассмотрим, как генерируется крутящий момент шагового двигателя. Мы знаем, что крутящий момент пропорционален произведению управляющего тока и числа витков обмотки (катушки). При большем числе оборотов крутящий момент выше, но крутящий момент на высокой скорости приносится в жертву, тем самым ограничивая максимальную скорость, с которой шаговый двигатель может эффективно работать. При меньшем числе оборотов крутящий момент уменьшается на более низких скоростях, но сохраняется до более высоких скоростей.
Давайте посмотрим на формулу крутящего момента.
Вот как ток влияет на кривую скорости вращения шагового двигателя.
Вот как количество витков обмотки влияет на кривую скорости вращения шагового двигателя.
Но… что, если вы не можете изменить ток обмотки или число витков?
N (количество витков обмотки) и I (ток) обычно указываются и не могут быть изменены, так что еще вы можете сделать, чтобы изменить кривую скорости вращения? Если у вас есть как минимум 6 проводов от вашего шагового двигателя, ответом будет рассмотрение «униполярной» и «биполярной» конфигурации проводки.
Что означает «униполярный» и «биполярный»?
Теперь давайте посмотрим на слова «униполярный» и «биполярный». Что именно означают эти слова?
Термины «униполярный» и «биполярный» произошли от типа драйверов, используемых для управления шаговыми двигателями. Проще говоря, «уни» в униполярном означает «один», а «би» в биполярном означает «два». «Полярный» означает электрическую и магнитную полярность (к вашему сведению: направление тока определяет полярность).
Основное различие между «униполярными» и «биполярными» шаговыми двигателями заключается в центральном ответвлении провода, которое разделяет полные витки обмотки пополам. Это можно сделать с помощью одного или двух проводов. Если вы удалите центральный ответвитель, то он станет биполярным последовательным соединением. Это можно сделать с помощью одного или двух проводов. Если вы удалите центральный ответвитель, то он станет биполярным последовательным соединением. |
Основное различие между «униполярными» драйверами и «биполярными» заключается в их способности передавать ток. Способность драйвера подавать ток в одном или обоих направлениях напрямую зависит от количества транзисторов, используемых драйвером. Биполярный драйвер потребует вдвое большего количества транзисторов, чем однополярный драйвер, чтобы управлять током, протекающим в обоих направлениях.
| СОВЕТ : Разъяснение между «Биполярный», «Биполярный-серийный», «Биполярный-параллельный» и т. д. |
Сам по себе двигатель не является униполярным или биполярным, но производители могут классифицировать шаговые двигатели как «униполярные» или «биполярные» в зависимости от количества подводящих проводов. Следовательно, шестипроводной шаговый двигатель можно классифицировать как «униполярный» двигатель, а четырехпроводной шаговый двигатель можно классифицировать как «биполярный». В то время как термины «униполярный» и «биполярный» относятся к типу используемого привода, «униполярный», «биполярный-последовательный» и «биполярный-параллельный» используются для описания проводки между двигателем и приводом. Подробнее об этом позже. |
 Однако помните, что «униполярный» двигатель всегда можно преобразовать в «биполярный».
Однако помните, что «униполярный» двигатель всегда можно преобразовать в «биполярный».
При переходе от однополюсного к двухполюсному или наоборот мы фактически изменяем электрические характеристики обмотки внутри двигателя, такие как напряжение, сопротивление и индуктивность, а также характеристики крутящего момента. Производители двигателей часто указывают разные наборы спецификаций для одного и того же двигателя в зависимости от типа соединения. Различные варианты обмотки предлагаются для шаговых двигателей с одинаковым типоразмером корпуса и длиной пакета для обеспечения гибкости.
Предлагаются различные обмотки для шаговых двигателей NEMA 23 (2,22″/56,4 мм), короткая длина корпуса
Как видно выше, гибкость соединений увеличивается с увеличением количества проводов.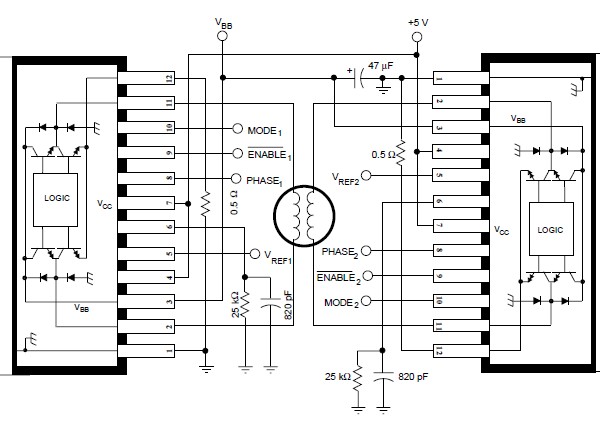 Шесть проводов двигатель может быть подключен униполярно или биполярно последовательно. Восьмипроводной двигатель может быть подключен униполярно, биполярно последовательно или биполярно параллельно. имеет четыре клеммы для подключения четырех, шести или восьми проводов от двигателя.0003
Шесть проводов двигатель может быть подключен униполярно или биполярно последовательно. Восьмипроводной двигатель может быть подключен униполярно, биполярно последовательно или биполярно параллельно. имеет четыре клеммы для подключения четырех, шести или восьми проводов от двигателя.0003
Хотя подключение четырехпроводного биполярного шагового двигателя к четырехконтактному биполярному драйверу довольно простое, вам действительно нужно знать, что вы делаете, чтобы подключить шести- или восьмипроводной биполярный шаговый двигатель к биполярному драйверу.
Не волнуйся. В конце этого поста мы поделимся шпаргалкой по подключению шагового двигателя, чтобы упростить задачу.
| СОВЕТ . Можно ли использовать спецификацию максимального удерживающего момента для расчета шагового двигателя? |
Поскольку максимальный удерживающий момент представляет собой выходной момент шагового двигателя при нулевой или очень низкой скорости, его не рекомендуется использовать для расчета двигателя. |
 Он используется для указания максимального крутящего момента, который может быть создан двигателем при полном номинальном токе.
Он используется для указания максимального крутящего момента, который может быть создан двигателем при полном номинальном токе.
Каковы все возможные способы подключения?
Существует только один способ подключения шестипроводного униполярного шагового двигателя к шестиконтактному униполярному приводу, но существует несколько способов подключения шагового двигателя к биполярному приводу в зависимости от количества проводов и желаемой производительности. В то время как униполярные драйверы более экономичны, биполярные драйверы обеспечивают большую гибкость и позволяют несколькими способами подключать четырех-, шести- и восьмипроводные шаговые двигатели.
Конфигурации биполярной проводки разделены на биполярную последовательную, биполярную параллельную и биполярную полуобмотку.
- Однополярный (6 или 8 проводов)
- Биполярная серия (4, 6 или 8 проводов)
- Биполярно-параллельный (4 или 8 проводов)
- Биполярная полукатушка (6 или 8 проводов)
На приведенных ниже принципиальных схемах показаны как обмотка двигателя, так и транзисторная схема драйвера.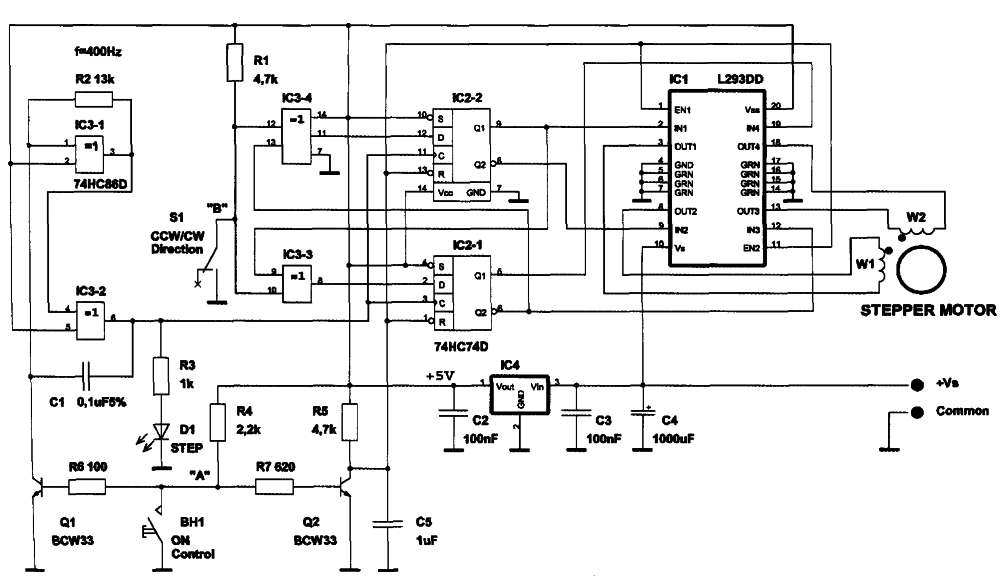
Униполярная и биполярная полукатушка
Для униполярной и биполярной половинной катушки мы фактически разделяем полную катушку и используем половину обмотки за раз. При этом мы используем меньше витков обмотки, поэтому двигатель не будет развивать большой крутящий момент. Поскольку индуктивность остается низкой, крутящий момент может поддерживаться до более высоких скоростей.
Биполярная серия
Для биполярной серии мы используем полную катушку (обмотку). При использовании всей обмотки двигатель будет выдавать больший крутящий момент по сравнению с однополярным. Однако индуктивность также увеличивается в четыре раза, поэтому крутящий момент быстро падает на более высоких скоростях.
Биполярно-параллельный
Для достижения наилучших характеристик скорости и крутящего момента рекомендуется биполярно-параллельный.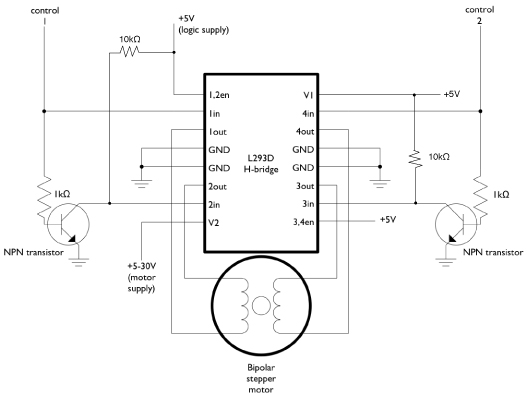 В этой конфигурации проводки также используется полная катушка, поэтому крутящий момент увеличивается примерно на 40% по сравнению с однополярным. Индуктивность также остается низкой, что позволяет поддерживать крутящий момент вплоть до более высоких скоростей. Однако мы должны увеличить ток примерно на 40%, чтобы получить эти преимущества.
В этой конфигурации проводки также используется полная катушка, поэтому крутящий момент увеличивается примерно на 40% по сравнению с однополярным. Индуктивность также остается низкой, что позволяет поддерживать крутящий момент вплоть до более высоких скоростей. Однако мы должны увеличить ток примерно на 40%, чтобы получить эти преимущества.
Изменения в характеристиках приведены ниже.
| Соединения | Сопротивление | Индуктивность | Текущий | Напряжение | Удерживающий момент |
| (Ом) | (мГн) | (А) | (В) | (унция дюйм) | |
| Однополярный | Н/Д | Н/Д | Н/Д | Н/Д | Н/Д |
| Биполярная серия | Однополярный X 2 | Однополярный X 4 | Однополярный X 0,707 | Однополярный X 1. 414 414 | Однополярный X 1.414 |
| Биполярный Полукатушка | То же, что и униполярный | То же, что и униполярный | То же, что и униполярный | То же, что и униполярный | То же, что и Unipolar |
| Биполярный параллельный | Однополярный X 0,5 | То же, что и униполярный | Однополярный X 1.414 | Однополярный X 0,707 | Однополярный X 1.414 |
При биполярно-параллельном соединении мы имеем низкую индуктивность при высоком токе и низком напряжении, что является хорошей комбинацией для достижения наилучших общих характеристик крутящего момента.
Как вы подключаете однополярную или биполярную последовательную, биполярно-параллельную или биполярную полукатушку?
Быстрым ответом было бы следовать правильным схемам подключения двигателя.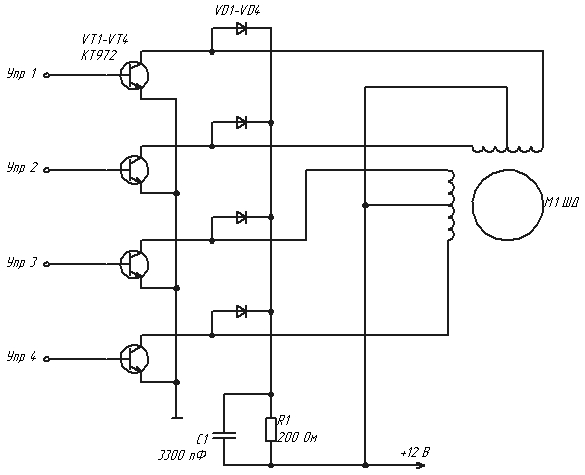 Сначала решите, какие конфигурации подключения возможны для вашего шагового двигателя, а затем найдите правильную схему подключения.
Сначала решите, какие конфигурации подключения возможны для вашего шагового двигателя, а затем найдите правильную схему подключения.
На приведенных ниже схемах показаны схемы внутренних обмоток шаговых двигателей с разным количеством выводов. Отслеживая текущий поток, вы можете визуализировать, какая часть обмотки используется. Если есть интерес к этому, пожалуйста, прокомментируйте.
| 4 провода | 5 проводов | 6 проводов | 8 проводов |
| СОВЕТ : Четырехпроводные шаговые двигатели |
Четырехпроводные шаговые двигатели могут быть намотаны как биполярно-последовательно, так и биполярно-параллельно внутри. Производители двигателей иногда не указывают, наматывается ли четырехпроводной двигатель для биполярного последовательного или биполярно-параллельного соединения. |
 Тем не менее, отрасль движется к биполярно-параллельному стандарту для параллельных соединений из-за его преимуществ в производительности. Еще одним фактором является снижение стоимости драйвера.
Тем не менее, отрасль движется к биполярно-параллельному стандарту для параллельных соединений из-за его преимуществ в производительности. Еще одним фактором является снижение стоимости драйвера.
Здесь мы покажем, как управлять конфигурацией проводки из стандартных подключений.
Например, чтобы подключить шаговый двигатель с восемью выводами к биполярному приводу с биполярно-параллельной конфигурацией проводки, вы должны соединить эти провода вместе, а затем подключить к соответствующим клеммам:
- Подключите черный и оранжевый к клемме А
- Подсоедините желтый/зеленый к клемме A-
- Подсоедините красный/коричневый к клемме B
- Подключите белый/синий к клемме B-
| СОВЕТ : Большая тройка проводки шагового двигателя |
Для успешной системы шагового двигателя требуются три компонента: |
Какой метод подключения лучше?
Это вопрос с подвохом.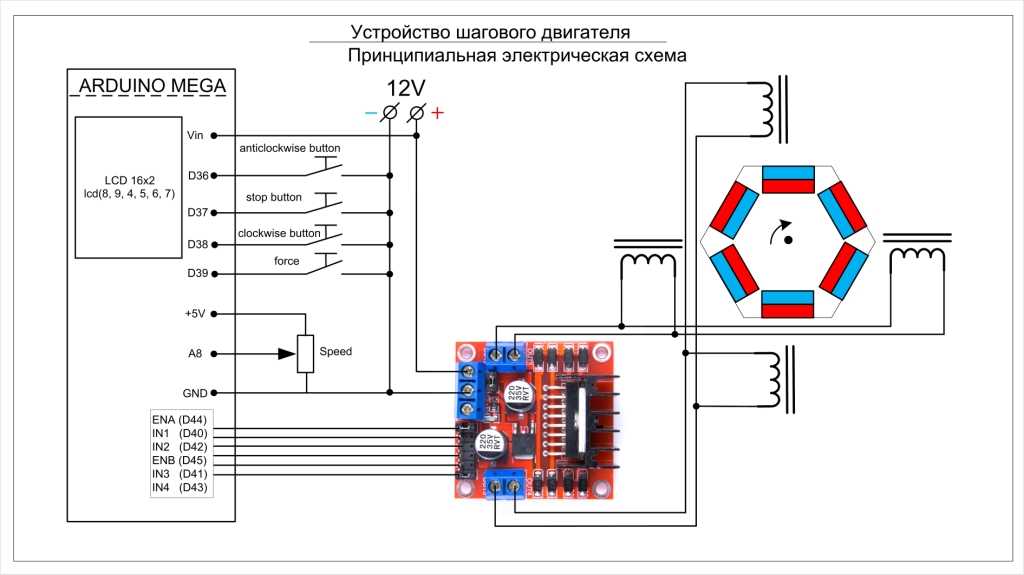 Ответ: это действительно зависит от вашего приложения. Тип конфигурации проводки обычно включается в расчет двигателя на этапе проектирования машины. Эти трюки с проводкой также позволяют повторно использовать один и тот же двигатель для разных целей.
Ответ: это действительно зависит от вашего приложения. Тип конфигурации проводки обычно включается в расчет двигателя на этапе проектирования машины. Эти трюки с проводкой также позволяют повторно использовать один и тот же двигатель для разных целей.
Например, если вы используете настройку униполярного шагового двигателя и хотите увеличить его низкоскоростной крутящий момент для другого применения, стоит изучить конфигурацию биполярной последовательной проводки, чтобы сохранить тот же размер двигателя. Для наилучшего сочетания скорости и крутящего момента попробуйте биполярно-параллельный. Однако он требует большего тока от драйвера. Помните, что это также зависит от того, какой у вас тип драйвера и какой ток он может выдавать.
Здесь показаны различия в характеристиках двигателя с перекрытием каждой отдельной кривой скорости-крутящего момента. Легко увидеть, как биполярно-параллельный (или параллельный биполярный) режим работает лучше всего.
Резюме
Подключая один и тот же шаговый двигатель по-разному, вы можете изменить электрические характеристики его обмотки и, в свою очередь, изменить рабочие характеристики того же двигателя, чтобы он лучше подходил для конкретного применения.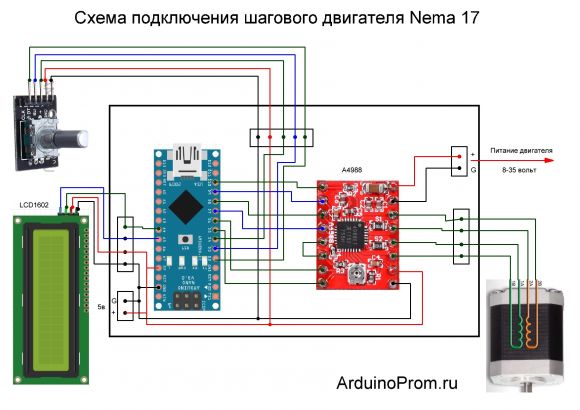 Однако вам нужно знать, что вы делаете.
Однако вам нужно знать, что вы делаете.
Биполярно-параллельные шаговые двигатели становятся все более популярными из-за снижения стоимости компонентов схемы драйвера. Чтобы упростить проводку, Oriental Motor имеет внутреннюю обмотку, поэтому для подключения требуется только четыре провода. Для каждого размера рамы и длины пакета предлагается несколько вариантов обмотки, что обеспечивает максимальную гибкость при интеграции в различные электрические конструкции драйверов.
При работе с шаговыми двигателями лучше убедиться, что вся команда находится на одной странице с конфигурацией проводки. Вы можете выбрать и купить правильный двигатель, но неправильная его проводка создаст как минимум некоторую путаницу.
Вот памятка, которая поможет вам при работе с униполярными и биполярными шаговыми двигателями. Не стесняйтесь добавить в закладки, если это поможет.
Пожалуйста, подпишитесь, если хотите получать уведомления о будущих сообщениях.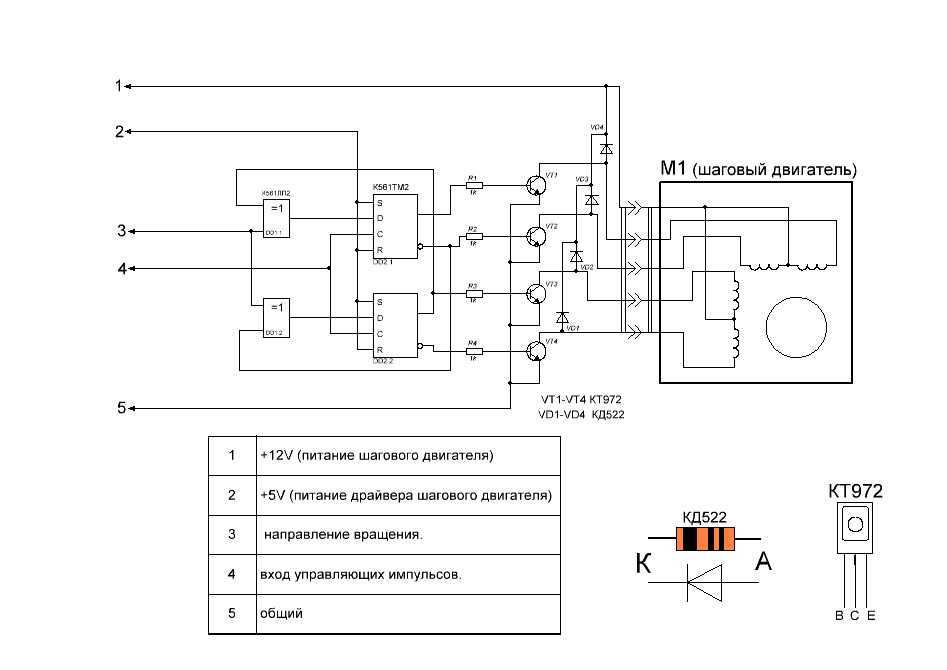
Руководство по подключению шагового двигателя — 42 бота
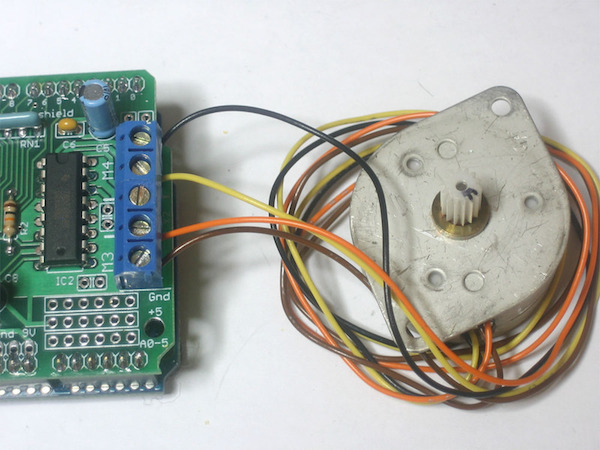
Иногда вы можете встретить старый шаговый двигатель, извлеченный из принтера, или древний дисковод. Если вам повезет, на двигателе будет номер детали, и, немного покопавшись, вы найдете техническое описание. Однако часто у вас будет двигатель без какой-либо маркировки и с четырьмя или шестью торчащими разноцветными проводами. Во-первых, вам нужно выяснить, как провода соединяются в пары для формирования катушек внутри двигателя. Метод проб и ошибок может сработать, но есть лучший способ! Все, что нужно, это мультиметр.
Как определить пары катушек четырехпроводного шагового двигателя с помощью мультиметра
Если ваш шаговый двигатель имеет 4 провода, это биполярный шаговый двигатель. Биполярные шаговые двигатели имеют две обмотки, которые не соединены друг с другом и имеют внутреннюю разводку следующим образом:
Поскольку катушки A и B на приведенной выше схеме не подключены, сопротивление между выводами A1 и B1 или между выводами A1 и B2 будет бесконечно.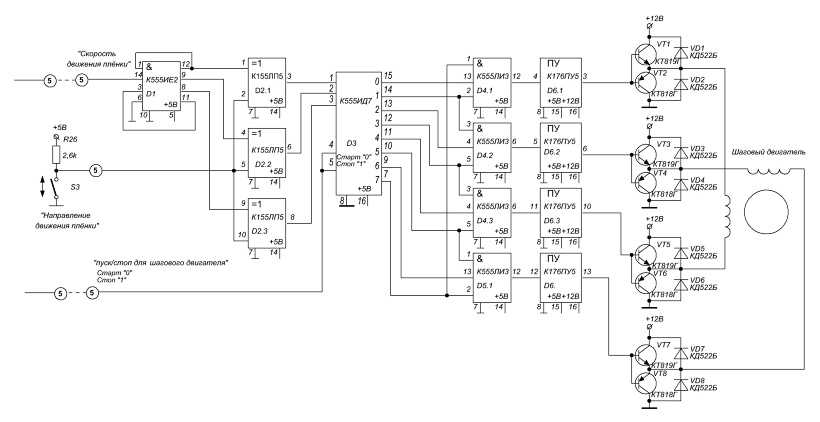 Сопротивление между A1 и A2 или между B1 и B2 будет определенно меньше бесконечности (хотя и больше нуля), поскольку они являются частью одной и той же обмотки. Физическое расположение проводов или цвета могут иногда указывать на сопряжение, как показано на фотографиях ниже. Тем не менее, простая проверка с помощью мультиметра, настроенного на измерение сопротивления, может сэкономить вам много времени на поиск и устранение неисправностей кода и проводки.
Сопротивление между A1 и A2 или между B1 и B2 будет определенно меньше бесконечности (хотя и больше нуля), поскольку они являются частью одной и той же обмотки. Физическое расположение проводов или цвета могут иногда указывать на сопряжение, как показано на фотографиях ниже. Тем не менее, простая проверка с помощью мультиметра, настроенного на измерение сопротивления, может сэкономить вам много времени на поиск и устранение неисправностей кода и проводки.
Изображение 1: черный и желтый провода не являются частью одной катушки, так как мультиметр показывает высокое (бесконечное) сопротивление , так как мультиметр показывает сопротивление примерно 18 Ом.
Теперь, когда мы определили, какие провода относятся к каждой катушке, как нам определить правильную полярность шагового двигателя? К сожалению, это невозможно сделать с помощью мультиметра… Подключите двигатель к выбранному драйверу двигателя. Подключите питание и запустите код, чтобы двигатель вращался по часовой стрелке.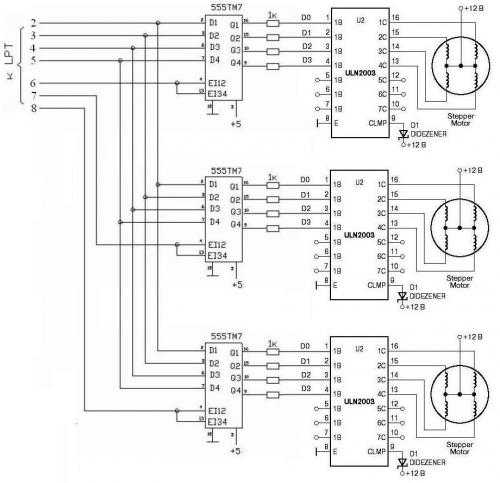 Если двигатель вращается в ожидаемом направлении, у вас правильная полярность. Если крутится наоборот, нужно поменять полярность одной из двух пар (не важно какой).
Если двигатель вращается в ожидаемом направлении, у вас правильная полярность. Если крутится наоборот, нужно поменять полярность одной из двух пар (не важно какой).
Как определить пары катушек шестипроводного шагового двигателя с помощью мультиметра
Шаговые двигатели с шестью проводами являются униполярными и имеют одну обмотку на фазу (как биполярные шаговые двигатели), но с центральным отводом. Внутренняя разводка этих двигателей выглядит так:
Глядя на схему выше, можно предположить, что сопротивление между A1 и AC будет вдвое меньше, чем между A1 и A2. Это связано с тем, что между AC и A1 меньше провода, чем между двумя концами катушки A, A1 и A2. То же самое относится к сопротивлению между BC и B1 или B2. Как и в случае с биполярным 4-проводным шаговым двигателем, между любыми проводами от катушки B и катушки A нет соединения (бесконечное сопротивление). Пришло время проверить теорию!
Изображение 3: Черный и коричневый провода, очевидно, являются частью одной катушки (сопротивление примерно 194 Ом) ) также являются частью той же катушки (сопротивление примерно 97 Ом).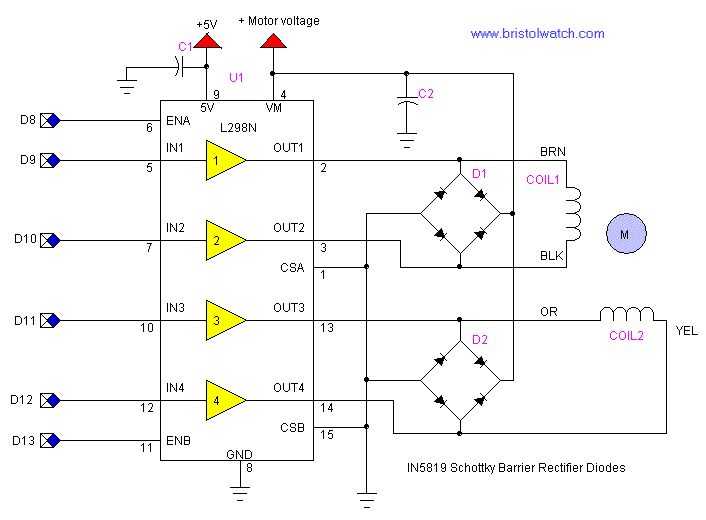
Верхний красный должен быть центральным отводом катушки с черным и коричневым проводами, так как сопротивление между красным и черным проводами вдвое меньше сопротивления между черным и коричневым проводом. Для надежности вам также следует измерить сопротивление между верхним красным и коричневым проводом, чтобы убедиться, что оно также составляет около 97 Ом.
Изображение 5: Желтый провод не должен быть частью той же катушки, что и черный, коричневый и верхний красный провода. Мультиметр не показывает электрического соединения между желтым и черным проводами.
Чтобы убедиться, я также перепроверил сопротивление между нижним красным и желтым проводами, а также сопротивление между желтым и оранжевым проводами. Другое измерение подтвердило, что два красных провода также не подключены.
Окончательный вердикт:
Одна катушка с черным и коричневым проводами, с верхним красным проводом в качестве центрального ответвления.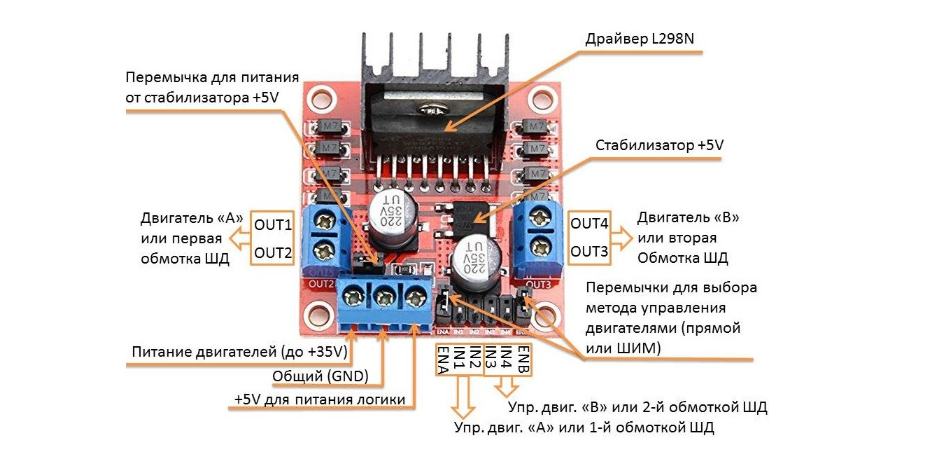
Другая катушка с желтым и оранжевым проводами с нижним красным проводом в качестве центрального ответвления.
Если ваш двигатель имеет 5 проводов проверьте, не подключен ли один из проводов к корпусу двигателя. Если это так, отметьте его, а затем выполните тот же тест, что и для четырехпроводного шагового двигателя. Если нет, то вы смотрите на униполярный двигатель, в котором два центральных язычка соединены. Дешевый шаговый двигатель 28byj-48 (см. учебник) является примером этого.
Вы по-прежнему можете использовать тест сопротивления для определения центрального ответвления, но сопротивление между остальными 4 проводами будет одинаковым из-за общего центрального ответвления. Здесь будут полезны некоторые пробы и ошибки или хорошая документация.
Если ваш двигатель имеет 8 проводов, внутренняя проводка должна выглядеть следующим образом.
У меня еще никогда не было шаговых двигателей такого типа, поэтому я не могу говорить здесь по опыту, но с помощью мультиметра и проверки проводов в паре вы должны получить пары (в конечном итоге).