Узнать мощность электродвигателя по диаметру вала без бирки
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Заказать новый электродвигатель по телефону
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
Какие размеры необходимо замерить:
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 | |||
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
Для начала нужно подключить двигатель к сети и замерить показатели напряжения. Замеряем потребляемый ток на каждой из обмоток фаз с помощью амперметра или мультиметра. Далее, находим сумму токов трех фаз и умножаем на ранее замеренные показатели напряжения, наглядно в формуле расчета мощности электродвигателя по току.
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
мин. Приводим пример маркировки на основании АИР 180:
- АИР 180 М2 – где 2 это 3000 оборотов.
- АИР 180 М4 – 4 это 1500 об. мин.
- АИР 180 М6 – 6 обозначает частоту вращения 1000 об/мин.
- АИР 180 М8 – 8 означает, что частота вращения выходного вала 750 оборотов.
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
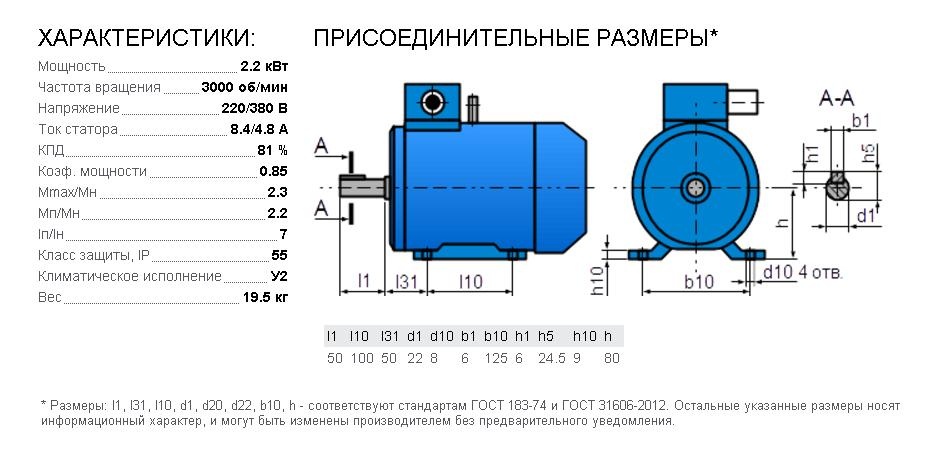
Как определить мощность двигателя по диаметру вала. Габаритные размеры
Здесь вы найдете максимально полные технические данные о габаритах и установочных размерах общепромышленных асинхронных электродвигателей АИР. Монтажные исполнения, габариты, крепежные размеры по лапам, диаметры валов и фланца, ширина шпонки и шпоночного паза. Сводные таблицы габаритно-присоединительных размеров асинхронных трехфазных двигателей серии АИР 63-355 габарита и 4АМ 100-355 мм.
Табличные данные позволят быстро вычислить мощность двигателя по диаметру вала. Зная присоединительные размеры, Вы сможете заказать соединительную муфту при комплектации электродвигателя с другим оборудованием (насосом, вентилятором, редуктором).
Зная присоединительные размеры, Вы сможете заказать соединительную муфту при комплектации электродвигателя с другим оборудованием (насосом, вентилятором, редуктором).
Если у Вас останутся вопросы, смело звоните менеджерам Слобожанского завода по указанным телефонам. Мы проконсультируем по техническим особенностям и производителям электродвигателей АИР, подберем нужное оборудование и доставим в короткие сроки в Ваш город.
Благодаря удобной навигации Вы можете сразу перейти к нужной таблице.
Условные обозначения параметров
Условные обозначения по ГОСТ габаритных размеров электродвигателей марок АИР, 4АМ:
- h — высота вращения вала или габарит электродвигателя. Высота от центра оси вала до земли. Важный присоединительный размер АИР при сборе агрегата и центровке
- l30*h41*d24 — длина, высота, ширина электродвигателя АИР, размеры по габаритам. Необходимы для калькуляции цены доставки и необходимого места при транспортировке
- m — вес электродвигателя, масса.
 Нужен для расчета транспортных издержек и сопромата
Нужен для расчета транспортных издержек и сопромата - d1 — диаметр вала. Габаритно-присоединительный размер АИР, необходимый при агрегатировании с другим оборудованием или подбора полумуфты
- d20 — ширина, крепежный диаметр фланца.
- d22 — диаметр отверстий фланца. Габаритный размер фланцевого электродвигателя типа АИР для изготовления или подбора ответного фланца
- l10 и b10 – расстояние между крепежными отверстиями на лапах электродвигателя. Важный габаритно-установочный размер, необходимый при монтаже электродвигателя к станине или на платформу
- L1 – длина вала
- b1 – ширина шпонки. Размер необходим для изготовления полумуфты
 Нужен для расчета транспортных издержек и сопромата
Нужен для расчета транспортных издержек и сопромата
Монтажное исполнение – фланец, лапы, комбинированное
Присоединительный и габаритный чертеж монтажного исполнения электродвигателя АИР на лапах (IM 1081), лапы-фланец (IM 2081), чистый фланец (IM 3081).
Чертеж двигателя на лапах
Чертеж IM2081, IM3081 (лапы-фланец)
Таблица диаметров валов
Как определить мощность электродвигателя по диаметру вала? С помощью таблицы с диаметрами валов, шириной шпонки электродвигателей стандарта «Интерэлектро» — АИР, 4АМ, 4А, 5АМ.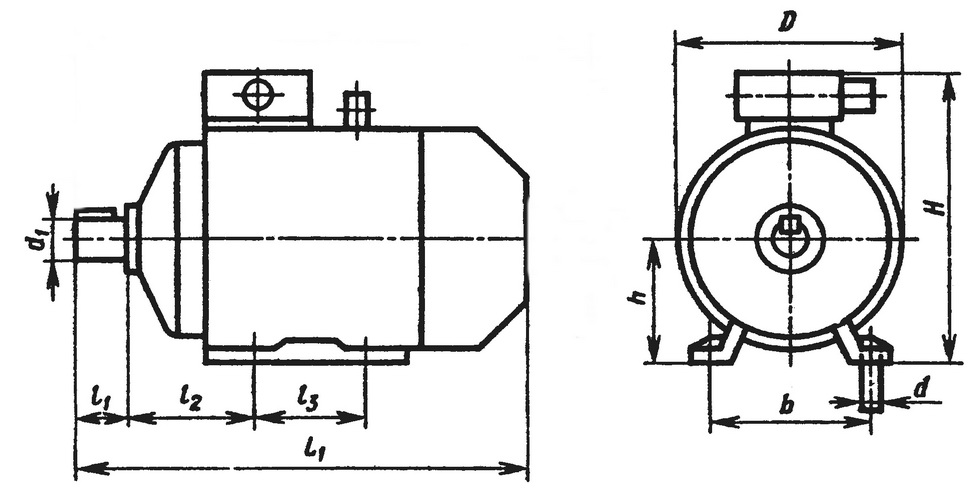
Данные характеристики полезны при подборе двигателя, подготовке к монтажу, проточке муфты.
При наличии маркировки, определение мощности, скорости вращения и прочих характеристик не составит сложности.
|
Диаметр вала, d1
|
Ширина шпонки, b1
|
Мощности и параметры электродвигателей (мощность/частота вращения)
| |||
|
3000 об
|
1500 об
|
1000 об
|
750 об
| ||
|
14
|
5
|
0,37/3000
|
0,25/1500; 0,37/1500
|
0,18/1000; 0,25/1000
|
—
|
|
19
|
6
|
0,75/3000; 1,1/3000
|
0,55/1500; 0,75/1500
|
0,37/1000; 0,55/1000
|
—
|
|
22
|
6
|
1,5/3000; 2,2/3000
|
1,1/1500; 1,5/1500
|
0,75/1000; 1,1/1000
|
—
|
|
24
|
8
|
3/3000
|
2,2/1500
|
1,5/1000
|
—
|
|
28
|
8
|
4/3000; 5,5/3000
|
3/1500; 4/1500
|
2,2/1000
|
—
|
|
32
|
10
|
7,5/3000
|
5,5/1500
|
3/1000
|
2,2/750; 3/750
|
|
38
|
10
|
18,5/3000
|
7,5/1500; 11/1500
|
5,5/1000; 7,5/1000
|
4/750; 5,5/750
|
|
42
|
12
|
15/3000; 18,5/3000
|
—
|
—
|
—
|
|
48
|
14
|
—
|
15/1500; 18,5/1500
|
11/1000; 15/1000
|
7,5/750; 11/750
|
|
55
|
16
|
37/3000; 45/3000; 55/3000
|
22/1500; 30/1500
|
18,5/1000
|
15/750
|
|
60
|
18
|
—
|
37/1500; 45/1500
|
22/1000; 30/1000
|
18,5/750; 22/750
|
|
65
|
18
|
75/3000; 90/3000
|
55/1500
|
55/1000
|
30/750
|
|
70
|
20
|
110/3000; 132/3000
|
—
|
—
|
—
|
|
75
|
20
|
160/3000; 200/3000
|
75/1500; 90/1500
|
45/1000; 55/1000
|
37/750; 45/750
|
|
80
|
22
|
—
|
110/1500; 132/1500
|
75/1000; 90/1000
|
55/750; 75/750
|
|
85
|
22
|
250/3000; 315/3000
|
—
|
—
|
—
|
|
90
|
25
|
—
|
160/1500; 200/1500
|
110/1000; 132/1000
|
90/750; 110/750
|
|
100
|
28
|
—
|
250/1500; 315/1500
|
160/1000; 200/1000
|
132/750; 160/750
|
Габаритные размеры общепромышленных электродвигателей:
Все крепежные и установочные размеры асинхронных электродвигателей АИР 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355-го габарита.
|
Двигатель
|
Характеристики
|
Габаритные размеры электродвигателя
|
Вес, кг
| |||||||
|
l30*h41*d24, мм
|
H, мм
|
D1, мм
|
L1, мм
|
Крепеж по лапам
|
Крепеж по фланцу
| |||||
|
L10
|
B10
|
D20
|
D22
| |||||||
|
63 габарит
| ||||||||||
|
АИР63A2
|
0,37/3000
|
239х163х161
|
63
|
14
|
30
|
80
|
100
|
130
|
10
|
5,2
|
|
АИР63A4
|
0,25/1500
| |||||||||
|
АИР63B2
|
0,55/3000
| |||||||||
|
АИР63B4
|
0,37/1500
| |||||||||
|
71 габарит
| ||||||||||
|
АИР71А2
|
0,75/3000
|
275х190х201
|
71
|
19
|
40
|
90
|
112
|
165
|
12
|
8,7
|
|
АИР71А4
|
0,55/1500
| |||||||||
|
АИР71А6
|
0,55/1500
| |||||||||
|
АИР71В2
|
1,1/3000
| |||||||||
|
АИР71В4
|
0,75/1500
| |||||||||
|
АИР71В6
|
0,55/1000
| |||||||||
|
80 габарит
| ||||||||||
|
АИР80А2
|
1,5/3000
|
301х208х201
|
80
|
22
|
50
|
100
|
125
|
165
|
11
|
13,3
|
|
АИР80А4
|
1,1/1500
| |||||||||
|
АИР80А6
|
0,75/1000
| |||||||||
|
АИР80В2
|
2,2/3000
|
322х210х201
|
15
| |||||||
|
АИР80В4
|
1,5/1500
| |||||||||
|
АИР80В6
|
1,1/1000
| |||||||||
|
90 габарит
| ||||||||||
|
АИР90L2
|
3/3000
|
395х210х260
|
90
|
24
|
50
|
125
|
140
|
215
|
15
|
26
|
|
АИР90L4
|
2,2/1500
|
395х210х270
|
25
| |||||||
|
АИР90L6
|
1,5/1000
|
395х210х295
|
18
| |||||||
|
АИР90LА8
|
0,75/750
|
25
| ||||||||
|
АИР90LВ8
|
1,1/750
|
435х230х295
|
28
| |||||||
|
100 габарит
| ||||||||||
|
АИР100S2
|
4/3000
|
410х210х270
|
100
|
28
|
60
|
112
|
160
|
215
|
15
|
33
|
|
АИР100S4
|
3/1500
|
31,5
| ||||||||
|
АИР100L2
|
5,5/3000
|
435х230х295
|
140
|
160
|
34,5
| |||||
|
АИР100L4
|
4/1500
|
37,5
| ||||||||
|
АИР100L6
|
2,2/1000
|
25
| ||||||||
|
АИР100L8
|
1,5/750
|
260х170х215
|
33,5
| |||||||
|
112 габарит
| ||||||||||
|
АИР112M2
|
7,5/3000
|
470х245х320
|
112
|
32
|
80
|
140
|
190
|
265
|
15
|
54
|
|
АИР112M4
|
5,5/1500
|
47
| ||||||||
|
АИР112MА6
|
3/1000
| |||||||||
|
АИР112MВ6
|
4/1000
|
49
| ||||||||
|
АИР112MА8
|
2,2/750
|
47
| ||||||||
|
АИР112MВ8
|
3/750
|
49
| ||||||||
|
132 габарит
| ||||||||||
|
АИР132М2
|
11/3000
|
560х420х400
|
132
|
38
|
80
|
178
|
216
|
300
|
19
|
74
|
|
АИР132М4
|
11/1500
|
72
| ||||||||
|
АИР132М6
|
7,5/1000
|
76
| ||||||||
|
АИР132М8
|
5,5/750
| |||||||||
|
АИР132S4
|
7,5/1500
|
540х420х400
|
140
|
216
|
64
| |||||
|
АИР132S6
|
5,5/1000
| |||||||||
|
АИР132S8
|
4/750
| |||||||||
|
160 габарит
| ||||||||||
|
АИР160S2
|
15/3000
|
700х410х560
|
160
|
42
|
110
|
178
|
254
|
300
|
19
|
108
|
|
АИР160M2
|
18,5/3000
|
210
|
146
| |||||||
|
АИР160S4
|
15/1500
|
48
|
178
|
126
| ||||||
|
АИР160S6
|
11/1000
|
122
| ||||||||
|
АИР160S8
|
7,5/750
|
121
| ||||||||
|
АИР160M4
|
18,5/1500
|
760х410х560
|
210
|
72
| ||||||
|
АИР160M6
|
15/1000
|
152
| ||||||||
|
АИР160M8
|
11/750
| |||||||||
|
180 габарит
| ||||||||||
|
АИР180S2
|
22/3000
|
810х450х590
|
180
|
48
|
110
|
203
|
279
|
300
|
19
|
194
|
|
АИР180М2
|
30/3000
|
241
|
200
| |||||||
|
АИР180М4
|
30/1500
|
55
|
194
| |||||||
|
АИР180М8
|
15/750
|
182
| ||||||||
|
АИР180S4
|
22/1500
|
770х450х590
|
203
|
166
| ||||||
|
АИР180М6
|
18,5/1000
|
1660х840х1160
|
241
|
194
| ||||||
|
200 габарит
| ||||||||||
|
АИР200М2
|
37/3000
|
870х500х670
|
200
|
55
|
110
|
267
|
318
|
400
|
19
|
238
|
|
АИР200L2
|
45/3000
|
140
|
305
|
254
| ||||||
|
АИР200М4
|
37/1500
|
60
|
267
|
264
| ||||||
|
АИР200L4
|
45/1500
|
305
|
292
| |||||||
|
АИР200М6
|
22/1000
|
267
|
224
| |||||||
|
АИР200L6
|
30/1000
| |||||||||
Как определить мощность и частоту оборотов электродвигателя
Возникла необходимость узнать мощность или частоту оборотов вала и другие параметры электродвигателя, но после внимательного осмотра на его корпусе не нашлось таблички (шылдика) с его наименованием и техническими параметрами. Придется определять самому, для этого есть несколько способов и мы их рассмотрим ниже.
Придется определять самому, для этого есть несколько способов и мы их рассмотрим ниже.
Мощность электродвигателя представляет из себя скорость преобразования электрической энергии, ее принято определять в ваттах.
Чтоб осознать, как это работает, нам понадобится 2 величины: сила тока и напряжение. Сила тока — численность тока, которое проходит через поперечное сечение за некий отрезок времени, ее принято определять в амперах. Напряжение — значение, равная работе по перемещению заряда меж 2-мя точками цепи, ее принято определять в вольтах.
Для расчета мощности используется формула N = A/t, где:
N — мощность;
А — работа;
t — время.
Часто электродвигатель поступает с завода с уже указанными техническими параметрами. Но заявленная мощность не всегда соответствует фактической, а скорее всего она может значить лишь максимальную мощность электропотока.
Так что если на вашем электроинструменте указана, например, мощность в 500 ват, это совсем не значит что инструмент будит потреблять точно 500 ват.
Электродвигатели производят стандартной дискретной мощности, линейки типа 1.5, 2.2, 4 кВт.
Опытный электрик может легко отличить 1.5 от 2.2 кВт всего лишь взглянув на его габариты. Помимо этого он сможет определить количество оборотов двигателя по размеру статора, количеству пар полюсов и диаметра вала.
Еще более опытным в этом деле окажется обмотчик, специалист который занимается перемоткой электродвигателей со 100%-ой уверенностью определит технические параметры вашего электродвигателя.
Если табличка с характеристиками двигателя потеряна для подсчета мощности двигателя нужно измерить силу тока на обмотках ротора и с помощью стандартной формулы найти потребляемую мощность электродвигателя.
Основные способы определения мощности двигателя
Определение мощности по току. Для этого подключаем двигатель в сеть и контролируем напряжение. Затем поочередно, в цепь каждой из обмоток статора включаем амперметр и замеряем потребляемый ток. После того как мы нашли суму потребляемых токов, полученное число необходимо умножить на фиксированное напряжение в результате получим число определяющее мощность электродвигателя в ваттах.
После того как мы нашли суму потребляемых токов, полученное число необходимо умножить на фиксированное напряжение в результате получим число определяющее мощность электродвигателя в ваттах.
Определяем мощность по габаритам. Нужно измерить диаметр сердечника (с внутренней стороны) и его длину.
Дальше если знаем частоту сети нужно узнать синхронную частоту вращения вала.
Умножаем синхронную частоту вращения вала на диаметр сердечника (в сантиметрах) полученную цифру умножаем на 3.14 затем разделяем на частоту сети умноженную на 120. Полученное значение мощности будит в киловаттах.
Замер по счетчику. Способ считается самым простым. Для этого, для чистоты эксперимента, отключаем все нагрузки в доме. Дальше необходимо включить двигатель на определенное время (например 10 минут) На щетчике будит видно разницу в киловаттах по ней уже легко можно высчитать сколько киловаттах потребляет двигатель. Удобней всего будит воспользоваться портативным электросчетчиком который показывает потребление в киловаттах (ваттах) в режиме реального времени.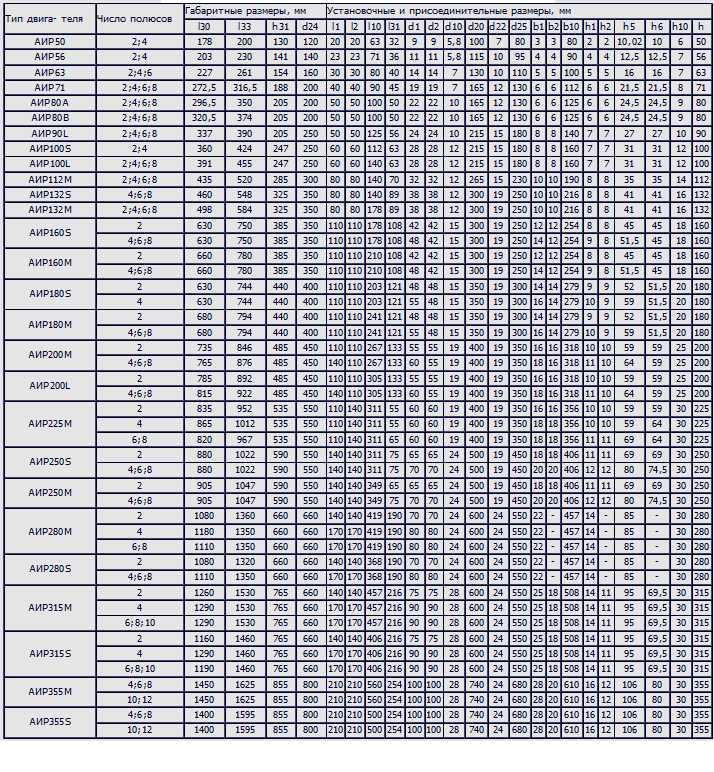
Для определения реального показателя мощности, которую выдает двигатель, необходимо найти скорость валового вращения, измеряемую в числе оборотов за секунду, тяговое усилие двигателя.
Частота вращения умножается последовательно на 6,28, показатель силы и радиус вала, который можно вычислить при помощи штангенциркуля. Найденное значение мощности выражается в ваттах.
Определяем рабочее количество оборотов двигателя.
Самый быстрый способ — посчитать количество катушек (катушечных групп)
Определяем мощность по расчетным таблицам. С помощью штангенциркуля замеряем диаметр вала, длину мотора (без выступающего вала) и расстояние до оси.Замеряем вылет вала и его выступающую часть, диаметр фланца если он есть, а также расстояние крепежных отверстий.
По этим данным с помощью сводной таблицы можно легко определить мощность двигателя и другие характеристики
1,1 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 71 | 80 | 80 |
| Диаметр вала d1, мм | 19 | 22 | 22 |
| Крепление лап по ширине b10, мм | 112 | 125 | 125 |
| Крепление лап по длине L10, мм | 90 | 100 | 100 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 165 | 165 |
| Замок фланца d25, мм | 130 | 130 | 130 |
1,5 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 80 | 80 | 90 |
| Диаметр вала d1, мм | 22 | 22 | 24 |
| Крепление лап по ширине b10, мм | 125 | 125 | 140 |
| Крепление лап по длине L10, мм | 100 | 100 | 125 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 165 | 215 |
| Замок фланца d25, мм | 130 | 130 | 180 |
2,2 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 80 | 90 | 100 |
| Диаметр вала d1, мм | 22 | 24 | 28 |
| Крепление лап по ширине b10, мм | 125 | 140 | 160 |
| Крепление лап по длине L10, мм | 100 | 125 | 140 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 215 | 215 |
| Замок фланца d25, мм | 130 | 180 | 180 |
4 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 100 | 100 | 112 |
| Диаметр вала d1, мм | 28 | 28 | 32 |
| Крепление лап по ширине b10, мм | 160 | 160 | 190 |
| Крепление лап по длине L10, мм | 112 | 140 | 140 |
| Крепление фланца по центрам отверстий d20, мм | 215 | 215 | 265 |
| Замок фланца d25, мм | 180 | 180 | 230 |
Как определить мощность электродвигателя?
Какими способами можно определить мощность электродвигателя?
Электрический двигатель представляет собой электрическую машину, роль которой заключается в преобразовании электрической энергии в энергию механическую.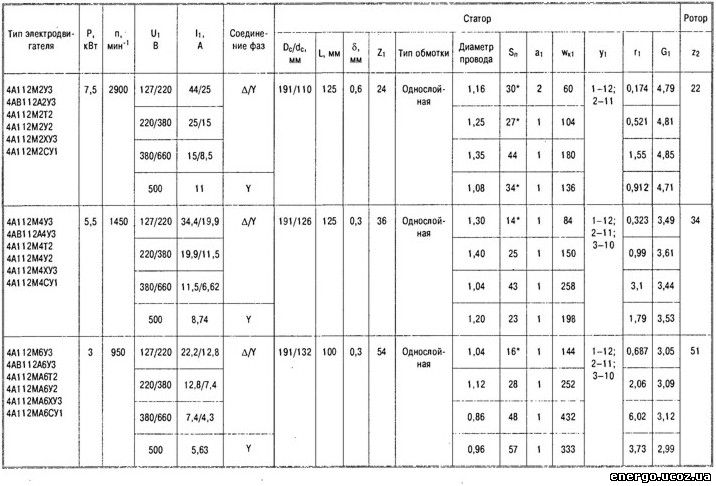
Нередко случаются ситуации, когда технический паспорт электродвигателя теряется, а маркировка на корпусе стирается в силу времени. В таком случае определить мощность электродвигателя становится сложно. Но существует несколько способов, которые помогут Вам справиться с подобной проблемой.
Определить мощность электродвигателя можно следующими способами:
- используя практические измерения;
- таблицы;
- исходя из количества оборотов в минуту;
- по габаритам;
- на основе мощности, которая выдается двигателем.
Практическое определение мощности электродвигателя
Наиболее простым и доступным каждому способом определить мощность электродвигателя является снятие показаний счетчика электрической энергии.
Изначально необходимо отключить все бытовые электроприборы, выключить свет во всем помещении. Важно помнить, что работа даже небольшой маломощной лампочки может сильно исказить показания.
Важно помнить, что работа даже небольшой маломощной лампочки может сильно исказить показания.
Обратите внимание на то, чтобы счетчик оставался неподвижным, а индикатор не мигал (все зависит от модели электрического счетчика).
В случае со счетчиком марки «Меркурий» процесс существенно облегчается, поскольку данная модель устройства отображает нагрузку в киловаттах (кВт). Следовательно, будет достаточно просто включить электродвигатель на всю мощность и посмотреть показания на счетчике.
В ситуации с индукционным счетчиком определить мощность электродвигателя будет несколько сложнее, поскольку учет ведется в киловаттах в час (кВт/ч). Сначала требуется записать показания счетчика до того, как включите мотор. После включения двигатель должен поработать в течение 10 минут. Для отслеживания времени пользуйтесь секундомером, точность периода работы очень важна. По прошествии 10 минут снимите новые показания счетчиков и способом вычитания выявите разницу. Разницу умножьте на 6. Итоговый результат будет обозначать мощность электродвигателя в киловаттах (кВт).
Разницу умножьте на 6. Итоговый результат будет обозначать мощность электродвигателя в киловаттах (кВт).
Определить мощность электродвигателя небольшой силы еще сложнее. Для этого нужно узнать количество оборотов (импульсов), равных 1 кВт/ч. Данную информацию Вы отыщите на счетчике. Возьмем для примера 1600 оборотов (в некоторых моделях вспышек индикатора). Итак, если при функционирующем электродвигателе электросчетчик совершает 20 об/мин, данную цифру нужно умножить на 60, т.е. количество минут в часе. В итоге получаем 1200 об/мин. После имеющиеся 1600 оборотов в минуту делим на 1200, получаем 1,3, что и являет собой мощность электродвигателя.
Определение мощности электродвигателя по таблицам
Сегодня люди за помощью все чаще обращаются к интернету, ведь там можно найти абсолютно любую информацию. Также при помощи глобальной сети Вы можете определить мощность электродвигателя по диаметру вала.
Для использования данного метода вычисления достаточно в интернете отыскать технические таблицы для распознавания типа мотора и его мощности, а также снять необходимые параметры (диаметр вала и частота его вращения, крепежные габариты, при фланцевом двигателе – диаметр фланца, расстояние до центра вала и расстояние до оси, длина мотора без выпирающего элемента вала).
Важно при таком способе быть терпеливым и внимательным, чтобы точно измерить все показатели и получить точный результат.
Как определить мощность электродвигателя по числу оборотов за одну минуту?
Применение данного способа для определения мощности электродвигателя требует визуального определения числа обмоток статора. Также необходимо применение специальных измерительных приборов, таких как тестер или миллиамперметр. для распознавания количества полюсов, чтобы избежать разбора мотора.
Измерительный прибор подключается к одной из обмоток. Вал при этом нужно вращать равномерно и постепенно. Отклонение стрелки и будет показывать количество полюсов. Важно учитывать тот факт, что частота вращения вала при таком способе определения мощности будет немного ниже полученного результата.
Вал при этом нужно вращать равномерно и постепенно. Отклонение стрелки и будет показывать количество полюсов. Важно учитывать тот факт, что частота вращения вала при таком способе определения мощности будет немного ниже полученного результата.
Определение мощности электродвигателя на основе его габаритов
Данный способ используется в основном для определения мощности трехфазных электродвигателей.
Для расчета мощности по габаритам необходимо знать:
- диаметр сердечника (см) – D. Измерение происходит во внутренней части статора. При этом необходимо знать длину сердечника, учитывая вентиляционные отверстия;
- показатель частоты валового вращения – n;
- частота сети – f.
Используя данные значения, вычисляется полюсное деление. Для этого показатель диаметра (D) умножается на частоту валового вращения (n) и на число Пи. Итоговую цифру обозначим условно А.
Показатель частоты сети f умножается на 120, получаем (условно) В.
Получив значения А и В, осуществляем их деление, а именно: число А делим на число В. В итоге получаем необходимый нам показатель мощности электродвигателя.
На самом деле все не так уж сложно, достаточно вспомнить уроки математики в школе.
Способ определения по показателю мощности, что выдает электродвигатель
В данном случае необходимо снова обратиться к знаниям школьной математики, а также использовать калькулятор для точного вычисления.
Сначала узнайте количество оборотов вала в секунду (А), тяговое усилие мотора (В) и радиус вала (С). Подставьте значения в следующую формулу: Аx6,28xBxC. Результат и есть мощность электродвигателя.
Зная мощность электродвигателя, Вы без труда сможете выбрать необходимое сопутствующее оборудование (тепловые реле и автоматические выключатели).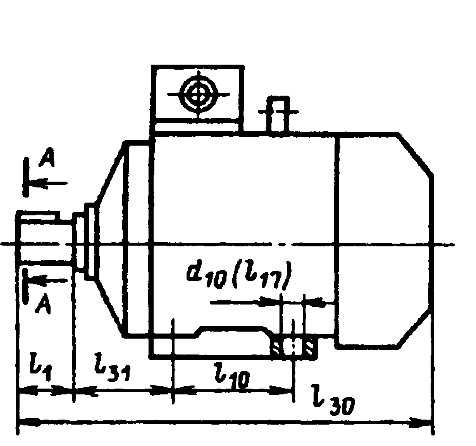 Также, знание данного показателя поможет Вам легко и быстро узнать пропускную способность и норму сечения кабельно-проводниковой продукции для подсоединения двигателя к сети. Самое главное – Вы сможете использовать электродвигатель без вероятности перегрузок.
Также, знание данного показателя поможет Вам легко и быстро узнать пропускную способность и норму сечения кабельно-проводниковой продукции для подсоединения двигателя к сети. Самое главное – Вы сможете использовать электродвигатель без вероятности перегрузок.
Как видите, определить мощность электродвигателя без бирки можно и при чем довольно просто. Способов достаточное количество. Вам остается лишь выбрать наиболее удобный и правдивый на ваш взгляд и воспользоваться им.
✔ Как узнать мощность электродвигателя?
Чаще всего мощность двигателя обозначена в техническом паспорте к устройству и продублирована на корпусе, где есть специальная наклейка или планка с основными техническими параметрами.
Однако нередко случается, что данные на корпусе являются не читаемыми, а технический паспорт давно утерян.
Как же в таком случае выяснить параметры мощности электромотора?
Определение по счетчику:
При отсутствии маркировки на корпусе электромотора можно вычислить его мощность несколькими способами.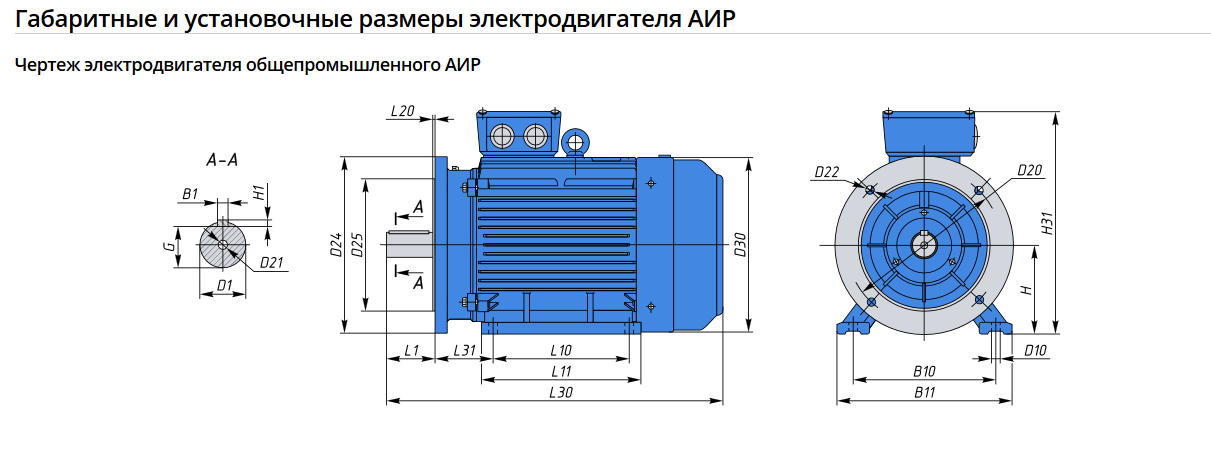 Самым простым методом является вычисление по счетчику электричества: потребуется отсоединить от этого прибора все прочие устройства, подключить электродвигатель и запустить его под нагрузкой на 5-7 минут. Большинство современных счетчиков выдает показатель нагрузки в киловаттах, и полученный показатель и будет исковым результатом.
Самым простым методом является вычисление по счетчику электричества: потребуется отсоединить от этого прибора все прочие устройства, подключить электродвигатель и запустить его под нагрузкой на 5-7 минут. Большинство современных счетчиков выдает показатель нагрузки в киловаттах, и полученный показатель и будет исковым результатом.
Вычисление по таблицам:
Другим способом определения мощности мотора является расчет по данным из таблиц. Для этого понадобится измерить диаметр вала, длину мотора без учета выступающей части вала, а также расстояние до оси. По этим параметрам можно выяснить, к какой серии относится данный мотор, и найти его технические характеристики, в том числе мощность. В сети можно отыскать технические таблицы по двигателям постоянного и переменного тока, где по найденному значению легко отыскать тип устройства и его мощность.
Вычисление по габаритам:
По данному способу необходимо провести следующие действия:
- Измерить диаметр сердечника в статоре по внутренней части, а также длину с учетом отверстий вентиляции. Значение выражается в сантиметрах.
- Вычислить частоту сети, к которой подключен электродвигатель, и синхронную частоту валового вращения.
- Узнать показатель полюсного деления: для этой цели диаметр сердечника умножается на синхронную частоту вращения вала, а найденное значение умножается на 3,14 и делится на частоту сети, умноженное на 120.
 Значение выражается в сантиметрах.
Значение выражается в сантиметрах.
Формула вычисления постоянного полюсного значения:
- Найти число полюсов, перемножив частоту тока на 60 и разделив на частоту валового вращения.
- Найденное число умножить на 2, после чего обратиться к таблице по определению зависимости константы от числа полюсов и выявить соответствующий показатель.
- Найденную постоянную величину умножают на квадрат от диаметра сердечника, длину и частоту вращения вала, после чего результат умножается по нижеприведенной формуле:
Найденное значение выражается в кВт.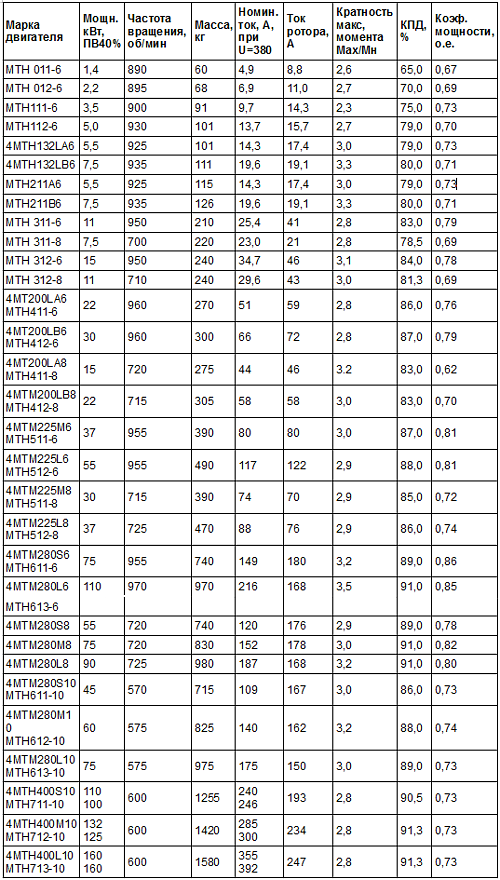
Вычисление мощности, выдаваемой электродвигателем.
Для вычисления реального показателя мощности, с которой работает электродвигатель, необходимо найти скорость валового вращения, выражаемую в числе оборотов за секунду, тяговое усилие мотора. Частота вращения умножается последовательно на 6,28, показатель силы и радиус вала, который можно вычислить при помощи штангенциркуля. Найденное значение мощности выражается в ваттах.
Определяем потребляемый ток:
Для тех, кому надо знать не только мощность, но и объем потребляемого тока, также есть несколько способов получения таких данных. Для каждого из них важным критерием в процессе определения является количество фаз.
Если у вас однофазная сеть, разделите показатель мощности на значение напряжения.
Если двигатель 3-фазный, схема подсчета еще проще: удвойте значение мощности — это и будет показатель в Амперах.
Как вы убедились, узнать мощность двигателя и потребляемый ток, даже если эти данные утеряны, достаточно просто. Выбирайте самый простой для вас способ решения проблемы и пусть ваша техника всегда работает исправно и имеет высокий КПД!
Выбирайте самый простой для вас способ решения проблемы и пусть ваша техника всегда работает исправно и имеет высокий КПД!
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором.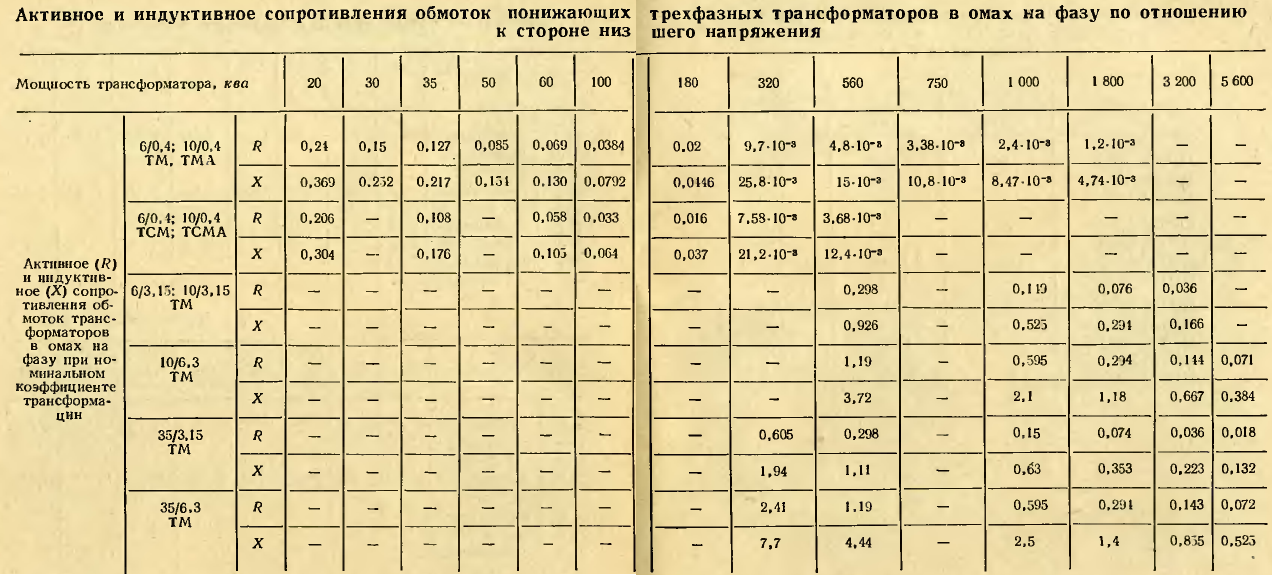 Они имеют сравнительно простую конструкцию и относительно недороги.
Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Как Определить Мощность Двигателя По Диаметру Вала ~ AUTOTEXNIKA.RU
В большинстве случаев мощность двигателя указывается в техническом паспорте устройства и дублируется на корпусе, где имеется специальная наклейка или полоска с основными техническими параметрами.
Но часто бывает так, что данные по делу не читаются, а технические данные долго теряются.
Тогда откуда мне знать силовые характеристики электродвигателя?
Если на корпусе двигателя нет отметки, вы можете рассчитать его мощность несколькими способами. Наиболее распространенным способом является расчет счетчика электроэнергии: вам нужно будет отключить все остальные устройства от этого устройства, подключить двигатель и запустить его под нагрузкой в течение 5-7 минут. Большинство современных счетчиков предоставляют счетчик нагрузки в квадратных метрах, и приобретенная цифра будет результатом претензии.
Другим методом определения мощности двигателя является расчет по этим таблицам. Полезно измерить диаметр вала, длину двигателя без учета выступающей части вала, а также расстояние до оси. По этим характеристикам вы можете узнать, к какой серии относится этот двигатель, а также узнать его технические характеристики, в том числе мощность. В сети вы можете найти таблицы данных по двигателям переменного и постоянного тока, где вы можете просто найти тип устройства и его мощность в соответствии с найденным значением.
Этот метод требует от вас сделать следующее:
- Измерьте диаметр сердечника в статоре с внутренней стороны, а также длину с учетом вентиляционных отверстий. Значение выражается в сантиметрах.
- Рассчитайте частоту сети, до который связан электродвигатель и синхронная валовая скорость.
- Определите индекс разделения полюсов: умножьте диаметр сердечника на скорость синхронного вала, умножьте найденное значение на 3,14 и разделите на частоту сети на 120.
4 кВт электродвигатель
- Найдите количество полюсов, умножив текущую частоту на 60 и разделив ее на общую скорость.
- Умножьте число на 2, затем обратитесь к таблице, чтобы определить зависимость константы от числа полюсов и определить соответствующий показатель.
- Найденное постоянное значение умножается на квадрат диаметра сердечника, длины и частоты вращения вала, после чего результат умножается на формулу ниже:
Найденное значение выражается в кВт.
Чтобы рассчитать фактическую мощность, с которой работает электродвигатель, необходимо найти общую скорость, выраженную в оборотах в секунду, тягу двигателя. Скорость вращения умножается на 6,28, силу и радиус вала, которые можно рассчитать с помощью штангенциркуля. Найденное значение мощности выражается в ваттах.
Для тех, кому необходимо знать не только мощность, но и количество потребляемого тока, есть также несколько способов получения таких данных. Для каждого из них основным аспектом в процессе определения является количество фаз.
Если у вас есть однофазная сеть, разделите мощность на напряжение.
Если двигатель трехфазный, схема расчета еще проще: двойной значение мощности. Это будет индикатор в Ампере.
Как вы уже видели, выяснить мощность двигателя и потребляемую мощность, даже если эти данные будут потеряны, довольно легко. Выберите наиболее распространенный метод решения проблемы, и пусть ваше оборудование всегда будет работать правильно и иметь максимальную эффективность!
Завод Инжиниринг | Соотношение крутящего момента и размера вала
Вы когда-нибудь задумывались, почему разные типы электродвигателей с одинаковой мощностью в лошадиных силах / киловаттах имеют разные диаметры валов или почему валы некоторых насосов намного меньше валов двигателей, которые их приводят в движение? А что насчет двигателей с полым валом? Элементарное понимание того, как определяются размеры вала, может быть полезно любому, кто работает с насосами, вентиляторами, лифтами или любым другим оборудованием с приводом от двигателя.
Чем больше, тем лучше — или, по крайней мере, раньше было
Отчасти благодаря традициям валы электродвигателей часто больше, чем валы оборудования, которым они управляют. Инженеры были очень консервативны сто лет назад, когда электродвигатели впервые получили широкое распространение в промышленности, поэтому при их проектировании обычно допускалась значительная погрешность. Сегодняшние инженеры в этом отношении мало что изменили. Например, стандартные размеры рамы NEMA, которые были пересмотрены только один раз с 1950 года, по-прежнему определяют гораздо большие размеры вала, чем того требуют общепринятые принципы машиностроения.
Основы конструкции вала
Размер вала определяется крутящим моментом, а не мощностью. Но изменения мощности и скорости (об / мин) влияют на крутящий момент, как показывает следующее уравнение:
Крутящий момент (фунт-фут) = л.с. x 5,252 / об / мин
Соответственно, для увеличения мощности потребуется больше крутящего момента, как и для уменьшения частоты вращения. Например, для двигателя мощностью 100 л.с., рассчитанного на 900 об / мин, потребуется вдвое больше крутящего момента, чем для двигателя мощностью 100 л.с., рассчитанного на 1800 об / мин.Каждый вал должен быть рассчитан на предполагаемую крутящую нагрузку.
Для определения необходимого минимального размера вала для двигателей используются два основных подхода, оба из которых дают умеренные результаты. Один метод требует сделать вал достаточно большим (и, следовательно, достаточно прочным), чтобы выдерживать указанную нагрузку без поломки. Инженеры-механики определяют это как способность передавать требуемый крутящий момент без превышения максимально допустимого напряжения сдвига при кручении материала вала.На практике это обычно означает, что минимальный диаметр вала может выдерживать, по крайней мере, двукратный номинальный крутящий момент двигателя.
Другой способ спроектировать вал — это рассчитать минимальный диаметр, необходимый для контроля крутильного прогиба (скручивания) во время эксплуатации. Для инженеров это означает, что допустимый крутящий момент или крутящий момент является функцией допустимого напряжения сдвига при кручении (в фунтах на квадратный дюйм или кПа) и модуля упругости полярного сечения (функция площади поперечного сечения вала).
Справочник по машинному оборудованию предоставляет следующие уравнения для определения минимальных размеров вала с использованием обоих подходов к проектированию: сопротивления крутильному прогибу и передачи крутящего момента.Обе системы уравнений основаны на стандартных значениях для стали, с допустимыми напряжениями 4000 фунтов на квадратный дюйм (2,86 кг / мм 2 ) для приводных валов и 6000 фунтов на квадратный дюйм (4,29 кг / мм 2 ) для трансмиссионных валов с шкивы (иногда называемые шкивами). Некоторые из уравнений также относятся к валам с шпонкой или без шпонки, что удобно для пользователей насосов, которым необходимо знать, как рассчитывать валы с шпонкой и без шпонки.
Передача крутящего момента
Большинство валов двигателей имеют шпонку, что увеличивает напряжение сдвига, действующее на вал.Учитывая это, конструкции вала двигателя обычно используют не более 75% максимального рекомендованного напряжения для вала без шпонки. Это еще одна причина, по которой валы электродвигателей часто больше, чем валы насосов, которые они приводят.
>> Уравнения 3-5 и примеры 1-4 см. На следующих страницах.
Пример 1
Рассмотрим двигатель мощностью 200 л.с. (150 кВт), 1800 об / мин. Для применения с прямым соединением стандартный размер рамы составляет 445TS с диаметром вала (шпоночного) 2.375 дюймов (60 мм). Используя уравнение [1], минимальный размер вала будет:
Или, в метрических единицах:
Чтобы увидеть, какой коэффициент запаса прочности учитывается в приведенных выше уравнениях, замените номинальную мощность 200 л.с. на 400 л.с.
Поскольку расчетный диаметр вала для двигателя мощностью 200 л.с. рассчитан на то, чтобы выдерживать удвоенный номинальный крутящий момент, диаметр вала 2,371 дюйма является абсолютным минимумом для номинальной мощности 400 л.с.
Устойчивость к скручиванию
Другой способ рассчитать минимальный размер вала двигателя — установить предел величины крутильного отклонения (скручивания), которое может произойти.Стойкость к скручивающим нагрузкам прямо пропорциональна размеру вала: чем больше диаметр, тем больше сопротивление скручиванию.
Практическое правило при использовании этого метода заключается в том, что вал должен быть достаточно большим, чтобы он не отклонялся более чем на 1 градус на длине, в 20 раз превышающей его диаметр. Чтобы рассчитать минимальный размер вала, соответствующий этой спецификации, используйте следующее уравнение:
Пример 2
Для двигателя 200 л.с. (150 кВт), 1800 об / мин из Примера 1, минимальный размер вала для ограничения крутильного прогиба будет:
Или, в метрических единицах:
Минимальные диаметры вала, рассчитанные с помощью методов передачи крутящего момента и крутильного отклонения, по существу одинаковы для примеров 1 и 2.Тем не менее, хороший подход — рассчитать размер в обоих направлениях, а затем использовать большее значение в качестве абсолютного минимума.
>> Конструкции полого вала, уравнение 5 и примеры 3-4 см. На следующей странице.
Конструкции с полым валом
Непосредственно связанные нагрузки оказывают скручивающее усилие (кручение) на вал, вызывая наибольшую деформацию вблизи поверхности или радиуса и очень небольшую — на внутренней части. Это делает конструкцию с полым валом практичной для вертикальных двигателей.Эти конструкции позволяют валу насоса проходить через полый вал двигателя, что упрощает процесс соединения валов насоса, которые должны поддерживать столб тяжелой воды, связанный с глубокой скважиной.
Расчет диаметра вала для вертикального двигателя с полым валом не такой простой. Две переменные — внешний и внутренний диаметры полого вала — не стандартизированы, что делает невозможным упрощение расчета с помощью соотношения. По этой причине легче продемонстрировать, достаточно ли конкретного полого вала для данной номинальной мощности.
Пример 3
Двигатель с полым валом мощностью 200 л.с. (150 кВт), 1800 об / мин имеет внешний диаметр вала 3 дюйма (76 мм) и внутренний диаметр 2 дюйма (51 мм). Чтобы определить, достаточно ли этого размера вала для передачи требуемого крутящего момента, решите следующее уравнение для P :
В этом примере мощность P должна быть больше 200 л.с., чтобы вал был достаточно большим, чтобы выдерживать крутящий момент двигателя.
Теоретически этот вал способен передавать 1700 л.с., так что этого более чем достаточно для 200 л.с.
Пример 4
Величина крутящего момента, который может передать полый вал, зависит от толщины стенки между его внутренним и внешним диаметром. Более тонкая стена не может выдержать такой же крутящий момент, как более толстая. 3-дюйм. вал в Примере 3 был способен передавать 1700 л.с. и имел стенку толщиной ½ дюйма: (3 дюйма — 2 дюйма) / 2 дюйма = ½ дюйма. вал передачи, если бы стена была только ¼ дюйма толщиной?
Эффект от более тонкой стены впечатляет.Вал с диаметром 0,25 дюйма. стена может выдерживать менее 20% крутящего момента вала со стенкой ½ дюйма.
Подведение итогов
Инженеры
, как правило, проектируют с учетом достаточного запаса прочности, в частности, старое оборудование было сконструировано чрезмерно даже по сегодняшним стандартам. Конечно, это одна из причин, по которой многие из нас ценят старую технику. Это было достаточно сложно, чтобы противостоять человеческим ошибкам, таким как неправильная центровка.
В любом случае имейте в виду, что добавление шпоночной канавки к существующему валу ослабляет вал.Точно так же увеличение диаметра отверстия полого вала снижает допустимый крутящий момент. Рассматривайте модификацию вала только при наличии хорошей инженерной поддержки. Даже в этом случае помните, что чем серьезнее последствия отказа, тем более значительным должен быть коэффициент безопасности. В конце концов, кто хочет использовать лифт, который был спроектирован и построен без учета запаса прочности?
Чак Юнг (Chuck Yung) — старший специалист по технической поддержке Ассоциации обслуживания электроаппаратуры (EASA).
Учебное пособие по электродвигателям постоянного тока
— Расчеты электродвигателей постоянного тока без сердечника с щетками
Расчет двигателей для бесщеточных двигателей постоянного тока без сердечника
При выборе бесщеточного двигателя постоянного тока без сердечника для приложения или при разработке прототипа с приводом необходимо учитывать несколько основных принципов физики двигателя, которые необходимо учитывать для создания безопасной, хорошо функционирующей и достаточно мощной прецизионной приводной системы.В этом документе мы представили некоторые важные методы, формулы и детали расчетов для определения выходной мощности двигателя без сердечника, кривую скорость-крутящий момент двигателя, графики тока и эффективности, а также теоретические расчеты в холодном состоянии, которые оценивают характеристики двигателя.
Двигатели постоянного тока
являются преобразователями, поскольку они преобразуют электрическую энергию ( P в ) в механическую энергию ( P из ). Частное обоих членов соответствует КПД двигателя.Потери на трение и потери в меди приводят к общей потере мощности ( P потери ) в Джоулях / сек (потери в железе в двигателях постоянного тока без сердечника пренебрежимо малы). Есть дополнительные потери из-за нагрева, но мы обсудим их ниже:
В физике мощность определяется как скорость выполнения работы. Стандартная метрическая единица измерения мощности — «ватт» Вт. Как рассчитывается мощность? Для линейного движения мощность — это произведение силы и расстояния в единицу времени P = F · (d / t) .Поскольку скорость — это расстояние во времени, уравнение принимает следующий вид: P = F · s . В случае вращательного движения аналогичный расчет мощности представляет собой произведение крутящего момента и углового расстояния в единицу времени или просто произведение крутящего момента и угловой скорости.
Где:
P = Мощность в Вт
M = Крутящий момент в Нм
F = Сила в Н
d = Расстояние в м
t = Время в с
ω рад = Угловая скорость в рад / с
Символ, используемый для крутящего момента, обычно представляет собой строчную греческую букву «τ» (тау) или иногда просто букву «T» .Однако, когда он называется «Момент силы», его обычно обозначают буквой «М» .
В европейской номенклатуре
часто используется строчная буква « n » для обозначения скорости вокруг оси. Обычно « n » выражается в единицах оборотов в минуту или об / мин.
При расчете механической мощности важно учитывать единицы измерения. При вычислении мощности, если « n » (скорость) находится в мин. -1 , тогда вы должны преобразовать его в угловую скорость в единицах рад / с .Это достигается путем умножения скорости на коэффициент преобразования единиц 2π / 60 . Кроме того, если « M » (крутящий момент) находится в мНм , то мы должны умножить его на 10 -3 (разделить на 1 000), чтобы преобразовать единицы в Нм для целей расчета.
Где:
n = Скорость, мин -1
M = Крутящий момент в мНм
Предположим, что необходимо определить мощность, которую конкретный двигатель 2668W024CR должен выдавать при холодной работе с крутящим моментом 68 мНм при скорости 7 370 мин. -1 .Произведение крутящего момента, скорости и соответствующего коэффициента преобразования показано ниже.
Расчет начальной требуемой мощности часто используется в качестве предварительного шага при выборе двигателя или мотор-редуктора. Если механическая выходная мощность, необходимая для данного приложения, известна, то можно проверить максимальную или продолжительную номинальную мощность для различных двигателей, чтобы определить, какие двигатели являются возможными кандидатами для использования в данном приложении.
Ниже приведен метод определения параметров двигателя на примере двигателя постоянного тока без сердечника 2668W024CR.Сначала мы объясним более эмпирический подход, а затем проведем теоретический расчет.
Одним из широко используемых методов графического построения характеристик двигателя является использование кривых крутящий момент-скорость. Хотя использование кривых крутящий момент-скорость гораздо чаще встречается в технической литературе для более крупных машин постоянного тока, чем для небольших устройств без сердечника, этот метод применим в любом случае.
Обычно кривые крутящий момент-скорость генерируются путем построения графиков скорости двигателя, тока двигателя, механической выходной мощности и эффективности в зависимости от крутящего момента двигателя.Следующее обсуждение будет описывать построение набора кривых крутящего момента-скорости для типичного двигателя постоянного тока на основе серии измерений необработанных данных.
2668W024CR имеет номинальное напряжение 24 В. Если у вас есть несколько основных частей лабораторного оборудования, вы можете измерить кривые крутящий момент-скорость для бессердечникового двигателя постоянного тока серии 2668 CR в заданной рабочей точке.
Шаг 1. Измерьте основные параметры
Многие параметры можно получить напрямую с помощью контроллера движения, такого как один из контроллеров движения FAULHABER MC3.Большинство производителей контроллеров предлагают программное обеспечение, такое как FAULHABER Motion Manager, которое включает функцию записи трассировки, которая отображает напряжение, ток, положение, скорость и т. Д. Они также могут предоставить точный снимок работы двигателя с мельчайшими подробностями. Например, семейство контроллеров движения MC3 (MC 5004, MC 5005 и MC 5010) может измерять множество параметров движения. Это, вероятно, самый быстрый метод получения данных для построения кривой крутящего момента — скорости, но это не единственный метод.
Если контроллер с функцией записи трассировки недоступен, мы также можем использовать некоторое базовое лабораторное оборудование для определения характеристик двигателя в условиях остановки, номинальной нагрузки и холостого хода. Используя источник напряжения, установленный на 24 В, запустите 2668W024CR без нагрузки и измерьте скорость вращения с помощью бесконтактного тахометра (например, стробоскопа). Кроме того, измерьте ток двигателя в этом состоянии без нагрузки. Токовый пробник идеально подходит для этого измерения, поскольку он не добавляет сопротивления последовательно с работающим двигателем.Используя регулируемую крутящую нагрузку, такую как тормоз для мелких частиц или регулируемый гистерезисный динамометр, нагрузка может быть связана с валом двигателя.
Теперь увеличьте крутящий момент двигателя точно до точки.
где происходит срыв. При остановке измерьте крутящий момент от
тормоз и ток двигателя. Ради этого
обсуждение, предположим, что муфта не добавляет нагрузки на
двигатель и что нагрузка от тормоза не
включать неизвестные фрикционные компоненты. Это также полезно
в этот момент, чтобы измерить оконечное сопротивление
мотор.Измерьте сопротивление, соприкоснувшись с двигателем.
клеммы с омметром. Затем раскрутите вал двигателя.
и сделайте еще одно измерение. Измерения
должны быть очень близки по стоимости. Продолжайте вращать вал
и сделайте не менее трех измерений. Это обеспечит
что измерения не проводились в точке
минимальный контакт на коммутаторе.
Теперь мы измерили:
n 0 = Скорость холостого хода
I 0 = Ток холостого хода
M H = Момент остановки
R = Терминальное сопротивление
Шаг 2: Постройте график зависимости тока отКрутящий момент и скорость в зависимости от крутящего момента
Вы можете подготовить график с крутящим моментом двигателя по абсциссе (горизонтальная ось), скоростью по левой ординате (вертикальная ось) и током по правой ординате. Масштабируйте оси на основе измерений, которые вы сделали на первом шаге. Проведите прямую линию от левого начала графика (нулевой крутящий момент и нулевой ток) до тока останова на правой ординате (крутящий момент при останове и ток останова). Эта линия представляет собой график зависимости тока двигателя от крутящего момента двигателя.Наклон этой линии представляет собой постоянную тока k I , которая является константой пропорциональности для отношения между током двигателя и крутящим моментом двигателя (в единицах тока на единицу крутящего момента или А / мНм). Обратной величиной этому наклону является постоянная крутящего момента k M (в единицах крутящего момента на единицу тока или мНм / А).
Где:
k I = постоянная тока
k M = постоянная момента
В целях данного обсуждения предполагается, что двигатель не имеет внутреннего трения.На практике момент трения двигателя M R определяется умножением постоянной крутящего момента k M двигателя на измеренный ток холостого хода I 0 . Линия зависимости крутящего момента от скорости и линия зависимости крутящего момента от тока затем начинается не с левой вертикальной оси, а со смещением по горизонтальной оси, равным расчетному моменту трения.
Где:
M R = Момент трения
Шаг 3: Постройте сюжет Power vs.Крутящий момент и эффективность в зависимости от крутящего момента
В большинстве случаев можно добавить две дополнительные вертикальные оси для построения графика зависимости мощности и КПД от крутящего момента. Вторая вертикальная ось обычно используется для эффективности, а третья вертикальная ось может использоваться для мощности. Для упрощения этого обсуждения КПД в зависимости от крутящего момента и мощность в зависимости от крутящего момента будут нанесены на тот же график, что и графики зависимости скорости от крутящего момента и тока от крутящего момента (пример показан ниже).
Составьте таблицу механической мощности двигателя в различных точках от момента холостого хода до момента остановки.Так как выходная механическая мощность — это просто произведение крутящего момента и скорости с поправочным коэффициентом для единиц (см. Раздел о вычислении начальной требуемой мощности), мощность может быть рассчитана с использованием ранее построенной линии зависимости скорости от крутящего момента.
Примерная таблица расчетов для двигателя 2668W024CR показана в таблице 1. Затем на график наносится каждая расчетная точка мощности. Результирующая функция представляет собой параболическую кривую, показанную ниже на Графике 1. Максимальная механическая мощность достигается примерно при половине крутящего момента сваливания.Скорость в этот момент составляет примерно половину скорости холостого хода.
Создайте таблицу в электронной таблице КПД двигателя в различных точках от скорости холостого хода до крутящего момента при остановке. Приведено напряжение, приложенное к двигателю, и нанесен график силы тока при различных уровнях крутящего момента. Произведение тока двигателя и приложенного напряжения является мощностью, потребляемой двигателем. В каждой точке, выбранной для расчета, КПД двигателя η представляет собой выходную механическую мощность, деленную на потребляемую электрическую мощность.Опять же, примерная таблица для двигателя 2668W024CR показана в Таблице 1, а примерная кривая — на Графике 1. Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке.
Определения сюжета
- Синий = скорость в зависимости от крутящего момента ( n против M )
- Красный = ток в зависимости от крутящего момента ( I против M )
- Зеленый = эффективность в зависимости от крутящего момента ( η против M )
- Коричневый = мощность в зависимости от крутящего момента ( P vs. M )
Характеристики двигателя
Примечание. Пунктирные линии представляют значения, которые могут быть получены для холодного двигателя (без повышения температуры), однако сплошные линии учитывают влияние магнита и
змеевик подогрева на теплом моторе (об этом позже). Обратите внимание, как все четыре сплошных графика изменяются в результате увеличения сопротивления медных обмоток и ослабления.
выходной крутящий момент из-за нагрева. Таким образом, ваши результаты могут немного отличаться в зависимости от того, холодный или теплый ваш двигатель, когда вы строите графики.
Теоретический расчет параметров двигателя
Еще одним полезным параметром при выборе двигателя является постоянная двигателя. Правильное использование этой добротности существенно сократит итерационный процесс выбора двигателя постоянного тока. Он просто измеряет внутреннюю способность преобразователя преобразовывать электрическую мощность в механическую.
Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке. Знаменатель называется потерей резистивной мощности. С помощью некоторых алгебраических манипуляций уравнение можно упростить до:
Имейте в виду, что k m (постоянная двигателя) не следует путать с k M (постоянная крутящего момента).Обратите внимание, что индекс константы двигателя — это строчная буква « m », в то время как индекс постоянной крутящего момента использует заглавную букву « M ».
Для щеточного или бесщеточного двигателя постоянного тока относительно небольшого размера отношения, которые управляют поведением двигателя в различных обстоятельствах, могут быть выведены из законов физики и характеристик самих двигателей. Правило Кирхгофа по напряжению гласит: «Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала.При применении к двигателю постоянного тока, последовательно подключенному к источнику постоянного тока, правило Кирхгофа может быть выражено следующим образом: «Номинальное напряжение питания от источника питания должно быть равно по величине сумме падений напряжения на сопротивлении обмоток. и обратная ЭДС, генерируемая двигателем ».
Где:
U = Электропитание в В
I = Ток в А
R = Терминальное сопротивление в Ом
U E = Обратная ЭДС в В
Обратная ЭДС, создаваемая двигателем, прямо пропорциональна угловой скорости двигателя.Константа пропорциональности — это постоянная обратной ЭДС двигателя.
Где:
ω = Угловая скорость двигателя
k E = Постоянная обратной ЭДС двигателя
Следовательно, путем подстановки:
Постоянная противо-ЭДС двигателя обычно указывается производителем двигателя в В / об / мин или мВ / об / мин. Чтобы получить значимое значение для обратной ЭДС, необходимо указать скорость двигателя в единицах, совместимых с указанной постоянной обратной ЭДС.
«Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала».
(Правило напряжения Кирхгофа)
Постоянная двигателя зависит от конструкции катушки, силы и направления магнитных линий в воздушном зазоре. Хотя можно показать, что три обычно указанные постоянные двигателя (постоянная противо-ЭДС, постоянная крутящего момента и постоянная скорости) равны, если используются надлежащие единицы, расчет облегчается указанием трех констант в общепринятых единицах.
Крутящий момент, создаваемый ротором, прямо пропорционален току в обмотках якоря. Константа пропорциональности — это постоянная крутящего момента двигателя.
Где:
M m = крутящий момент, развиваемый на двигателе
k M = постоянная крутящего момента двигателя
Подставляя это соотношение для получения текущего ресурса:
Крутящий момент, развиваемый на роторе, равен моменту трения двигателя плюс момент нагрузки (из-за внешней механической нагрузки):
Где:
M R = момент трения двигателя
M L = момент нагрузки
Предполагая, что на клеммы двигателя подается постоянное напряжение, скорость двигателя будет прямо пропорциональна сумме момента трения и момента нагрузки.Константа пропорциональности — это наклон кривой крутящий момент-скорость. Моторные характеристики лучше, когда это значение меньше. Чем круче спад наклона, тем хуже производительность, которую можно ожидать от данного двигателя без сердечника. Это соотношение можно рассчитать по формуле:
Где:
Δn = Изменение скорости
ΔM = Изменение крутящего момента
M H = Тормозной момент
n 0 = Скорость холостого хода
Альтернативный подход к получению этого значение — найти скорость, n :
Используя исчисление, мы дифференцируем обе стороны относительно M , что дает:
Хотя здесь мы не показываем отрицательный знак,
это подразумевается
что результат приведет к уменьшению (отрицательному)
склон.
Пример расчета теоретического двигателя
Давайте немного углубимся в теоретические расчеты. Двигатель постоянного тока без сердечника 2668W024CR должен работать с напряжением 24 В на клеммах двигателя и крутящим моментом 68 мНм. Найдите результирующую константу двигателя, скорость двигателя, ток двигателя, КПД двигателя и выходную мощность. Из таблицы данных двигателя видно, что скорость холостого хода двигателя при 24 В составляет 7 800 мин -1 .Если крутящий момент не связан с валом двигателя, двигатель будет работать с этой скоростью.
Во-первых, давайте получим общее представление о характеристиках двигателя, вычислив постоянную двигателя k m . В этом случае мы получаем константу 28,48 мНм / кв.
Скорость двигателя под нагрузкой — это просто скорость холостого хода за вычетом снижения скорости из-за нагрузки. Константа пропорциональности для отношения между скоростью двигателя и крутящим моментом двигателя — это крутизна зависимости крутящего момента от крутящего момента.Кривая скорости, заданная делением скорости холостого хода двигателя на крутящий момент при останове. В этом примере мы вычислим снижение скорости (без учета температурных эффектов), вызванное нагрузкой крутящего момента 68 мНм, исключив единицы измерения мНм:
Теперь через замену:
В этом случае скорость двигателя под нагрузкой должна быть приблизительно:
Ток двигателя под нагрузкой складывается из тока холостого хода и тока, возникающего в результате нагрузки.
Константа пропорциональности, относящаяся к току и нагрузке крутящего момента, является постоянной крутящего момента ( k M ) . Это значение составляет 28,9 мНм / А. Взяв обратную величину, мы получаем постоянную тока k I , которая может помочь нам рассчитать ток при нагрузке. В этом случае нагрузка составляет 68 мНм, а ток, возникающий в результате этой нагрузки (без учета нагрева), приблизительно равен:
.
Полный ток двигателя можно приблизительно определить, суммируя это значение с током холостого хода двигателя.В таблице данных указан ток холостого хода двигателя как 78 мА. После округления общий ток будет примерно:
.
Выходная механическая мощность двигателя — это просто произведение скорости двигателя и крутящего момента с поправочным коэффициентом для единиц (при необходимости). Следовательно, выходная мощность двигателя будет примерно:
.
Подводимая к двигателю механическая мощность является произведением приложенного напряжения и общего тока двигателя в амперах. В этом приложении:
Так как КПД η — это просто выходная мощность, деленная на входную мощность, давайте вычислим ее в нашей рабочей точке:
Оценка температуры обмотки двигателя во время работы:
Ток I , протекающий через сопротивление R , приводит к потере мощности в виде тепла I 2 · R .В случае двигателя постоянного тока произведение квадрата полного тока двигателя и сопротивления якоря представляет собой потерю мощности в виде тепла в обмотках якоря. Например, если общий ток двигателя составлял 0,203 А, а сопротивление якоря 14,5 Ом, потери мощности в виде тепла в обмотках составят:
Тепло, возникающее в результате потерь в катушке I 2 · R , рассеивается за счет теплопроводности компонентов двигателя и воздушного потока в воздушном зазоре. Легкость, с которой это тепло может рассеиваться в двигателе (или любой системе), определяется тепловым сопротивлением.
Термическое сопротивление (которое является обратной величиной теплопроводности) показывает, насколько хорошо материал сопротивляется передаче тепла по определенному пути. Производители двигателей обычно указывают способность двигателя рассеивать тепло, предоставляя значения теплового сопротивления R th . Например, алюминиевая пластина с большим поперечным сечением будет иметь очень низкое тепловое сопротивление, тогда как значения для воздуха или вакуума будут значительно выше. В случае двигателей постоянного тока существует тепловой путь от обмоток двигателя к корпусу двигателя и второй тепловой канал между корпусом двигателя и окружающей средой двигателя (окружающий воздух и т. Д.).). Некоторые производители двигателей указывают тепловое сопротивление для каждого из двух тепловых путей, в то время как другие указывают только их сумму в качестве общего теплового сопротивления двигателя. Значения термического сопротивления указаны в увеличении температуры на единицу потери мощности. Общие потери I 2 · R в катушке (источнике тепла) умножаются на тепловые сопротивления для определения установившейся температуры якоря. Повышение температуры в установившемся режиме двигателя ( T ) определяется по формуле:
Где:
ΔT = Изменение температуры в К
I = Ток через обмотки двигателя в А
R = Сопротивление обмоток двигателя в Ом
R th2 = Тепловое сопротивление от обмоток к корпусу в к / Вт
R th3 = Тепловое сопротивление окружающей среде в к / Вт
Продолжим наш пример, используя двигатель 2668W024CR, работающий с током 2458 А в обмотках двигателя, с сопротивлением якоря 1, 03 Ом, тепловое сопротивление между обмоткой и корпусом составляет 3 к / Вт, а тепловое сопротивление между корпусом и окружающей средой — 8 к / Вт.Повышение температуры обмоток рассчитывается по формуле ниже; мы можем заменить Ploss на I 2 · R :
Поскольку шкала Кельвина использует то же приращение единиц, что и шкала Цельсия, мы можем просто подставить значение Кельвина, как если бы оно было значением Цельсия. Если предположить, что температура окружающего воздуха составляет 22 ° C, то конечная температура обмоток двигателя может быть приблизительно равна:
Где:
T теплый = Температура обмотки
Важно убедиться, что конечная температура обмоток не превышает номинальное значение двигателя, указанное в техническом паспорте.В приведенном выше примере максимально допустимая температура обмотки составляет 125 ° C. Поскольку расчетная температура обмотки составляет всего 90,4 ° C, тепловое повреждение обмоток двигателя не должно быть проблемой в этом приложении.
Можно использовать аналогичные вычисления, чтобы ответить на вопросы другого типа. Например, приложение может потребовать, чтобы двигатель работал с максимальным крутящим моментом, в надежде, что он не будет поврежден из-за перегрева. Предположим, требуется запустить двигатель с максимально возможным крутящим моментом при температуре окружающего воздуха 22 ° C.Дизайнер хочет знать, какой крутящий момент двигатель может безопасно обеспечить без перегрева. Опять же, в техническом описании двигателя постоянного тока без сердечника 2668W024CR указана максимальная температура обмотки 125 ° C. Итак, поскольку температура окружающей среды составляет 22 ° C, максимально допустимое повышение температуры ротора составляет: 125 ° C — 22 ° C = 103 ° C
Теперь мы можем рассчитать увеличение сопротивления катушки из-за рассеивания тепловой мощности:
Где:
α Cu = Температурный коэффициент меди в единицах K -1
(Обратный Кельвин)
Таким образом, из-за нагрева катушки и магнита из-за рассеивания мощности от потерь I 2 · R сопротивление катушки увеличилось с 1,03 Ом до 1,44 Ом.Теперь мы можем пересчитать новую постоянную крутящего момента k M , чтобы увидеть влияние повышения температуры на характеристики двигателя:
Где:
α M = Температурный коэффициент магнита в единицах K -1
(Обратный Кельвин)
Теперь мы пересчитываем новую константу обратной ЭДС k E и наблюдаем за результатами. Из формулы, полученной нами выше:
Как мы видим, постоянная крутящего момента ослабевает в результате повышения температуры, как и константа обратной ЭДС! Таким образом, сопротивление обмотки двигателя, постоянная крутящего момента и постоянная обратная ЭДС — все это отрицательно сказывается по той простой причине, что они зависят от температуры.
Мы могли бы продолжить вычисление дополнительных параметров в результате более горячей катушки и магнита, но наилучшие результаты дает выполнение нескольких итераций, что лучше всего выполняется с помощью программного обеспечения для количественного анализа. По мере того, как температура двигателя продолжает расти, каждый из трех параметров будет изменяться таким образом, что ухудшает характеристики двигателя и увеличивает потери мощности. При непрерывной работе двигатель может даже достичь точки «теплового разгона», что потенциально может привести к невозможности ремонта двигателя.Это может произойти, даже если первоначальные расчеты показали приемлемое повышение температуры (с использованием значений R и k M при температуре окружающей среды).
Обратите внимание, что максимально допустимый ток через обмотки двигателя может быть увеличен за счет уменьшения теплового сопротивления двигателя. Тепловое сопротивление между ротором и корпусом R th2 в первую очередь определяется конструкцией двигателя. Тепловое сопротивление корпуса R th3 может быть значительно уменьшено путем добавления радиаторов.Тепловое сопротивление двигателя для небольших двигателей постоянного тока обычно указывается для двигателя, подвешенного на открытом воздухе. Поэтому обычно наблюдается некоторый отвод тепла, который возникает в результате простой установки двигателя в теплопроводящий каркас или шасси. Некоторые производители более крупных двигателей постоянного тока указывают тепловое сопротивление, когда двигатель установлен на металлической пластине известных размеров и из материала.
Для получения дополнительной информации о расчетах электродвигателя постоянного тока без сердечника и о том, как на производительность электродвигателя может повлиять рассеяние тепловой мощности, обратитесь к квалифицированному инженеру FAULHABER.Мы всегда готовы помочь.
Расчет размеров двигателя
Правильный размер и выбор двигателя для вашего оборудования являются ключом к обеспечению производительности, надежности и стоимости оборудования. В дополнение к приведенной ниже информации о правильном выборе двигателя Oriental Motor предлагает онлайн-инструменты для выбора двигателя, а также помощь сотрудников нашей службы технической поддержки.
Наша служба технической поддержки готова помочь вам правильно определить размер и выбрать двигатель в зависимости от вашего индивидуального применения.Просто позвоните по телефону 1-800-GO-VEXTA (468-3982) (с понедельника по пятницу с 7:30 до 17:00 по тихоокеанскому стандартному времени).
Процедура выбора
Первым делом необходимо определить приводной механизм для вашего оборудования. Некоторые примеры: прямое вращение, шариковый винт, ремень и шкив или рейка и шестерня. Наряду с типом приводного механизма необходимо также определить размеры, массу, коэффициент трения и т. Д., Необходимые для расчета нагрузки:
- Размеры и масса (или плотность) груза
- Размеры и масса (или плотность) каждой детали
- Коэффициент трения скользящей поверхности каждой подвижной части
Далее вам нужно будет определить требуемые технические характеристики на оборудование:
- Скорость и время работы
- Расстояние позиционирования и время позиционирования
- Разрешение
- Точность остановки
- Удержание позиции
- Электропитание и напряжение
- Операционная среда
- Особые функции и требования, такие как; Разомкнутый цикл, замкнутый цикл, программируемый, обратная связь, рейтинг IP, утверждения агентов и т. Д.
Чтобы определить требуемую мощность двигателя, необходимо вычислить три фактора; Момент инерции, крутящий момент и скорость. (Обратитесь к нижеследующим разделам по расчетам для каждого.)
После того, как вы рассчитали инерцию, крутящий момент и скорость двигателя, вы выберете тип двигателя на основе требуемых характеристик. Oriental Motor предлагает широкий ассортимент шаговых двигателей, серводвигателей, двигателей переменного тока и бесщеточных двигателей для удовлетворения конкретных потребностей вашего оборудования.
Наконец, после выбора типа двигателя вы сделаете окончательное определение двигателя, подтвердив, что характеристики выбранного двигателя (и редуктора, если применимо) удовлетворяют всем требованиям, таким как механическая прочность, время ускорения и момент ускорения.
Расчет размеров двигателя
При выборе двигателя необходимо учитывать три фактора; Момент инерции, крутящий момент и скорость.
Момент инерции
Момент инерции — это мера сопротивления объекта изменениям скорости его вращения.
Когда объект просто сидит без движения, момент инерции равен 0.
Когда вы пытаетесь заставить его двигаться, что означает, что вы хотите изменить скорость объекта с 0 на любую, возникнет эффект момента инерции.
Уравнение основной инерции (Дж) :
Расчет момента инерции вращающегося объекта
Расчет момента инерции цилиндра
Расчет момента инерции полого цилиндра
Расчет момента инерции для смещенной оси
Расчет момента инерции для прямоугольной опоры
Расчет момента инерции для объекта, движущегося линейно
Единицы измерения момента инерции
Единицы инерции обычно используются двумя способами: унций на дюйм² и унций на дюйм² .Первое включает в себя гравитацию, второе — только массу.
Теоретически инерция — это фактор массы, поэтому он не должен включать гравитацию, однако практически мы не можем легко измерить массу на Земле.
Oriental Motor обычно обеспечивает инерцию в унциях на дюйм. Затем, когда мы вычисляем момент ускорения в расчете крутящего момента, мы делим общую инерцию на силу тяжести.
Плотность = 386 дюйм / сек²
- oz-in² = инерция в зависимости от веса
- унций / сек² = инерция, основанная на массе
Вычисление унций-дюймов² до унций-дюймов²
Момент
Крутящий момент — это стремление силы вращать объект вокруг оси.Крутящий момент состоит из двух компонентов; компонент нагрузки (постоянный) и компонент ускорения.
Составляющая момента нагрузки обычно возникает из-за трения и / или силы тяжести и всегда действует на двигатель. Этот компонент обычно можно определить путем расчета или путем наложения динамометрического ключа на систему и считывания значения крутящего момента. Когда его невозможно измерить, мы используем некоторые уравнения для расчета приблизительного значения.
Однако ускоряющий момент действует на двигатель только тогда, когда он ускоряется или замедляется.Как только двигатель работает с постоянной скоростью, этот компонент уходит. Измерять составляющую ускорения сложно, не говоря уже об опасности. Если вы хотите, чтобы нагрузка набирала скорость в течение 50 миллисекунд, вполне вероятно, что динамометрический ключ слетит. Поэтому рассчитываем составляющую ускорения. Этот компонент является функцией инерции системы и скорости ускорения. Итак, как только мы определим эти значения, мы сможем вычислить момент ускорения.
Момент нагрузки ( T )
Нагрузка крутящего момента очень проста.
Как вы видите, крутящий момент в этом уравнении является произведением силы и расстояния между силой и центром вращения. Например, если вы хотите удержать силу, действующую на конец шкива, T = F x r . Таким образом, расчет момента нагрузки определяет силу в системе и логическое расстояние между валом двигателя и местом действия силы.
Когда механика усложняется, нам нужно преобразовать F и r, чтобы они соответствовали механике.
Момент нагрузки — фактическое измерение
Если вы можете измерить силу, это наиболее точный способ найти силу, поскольку он учитывает всю эффективность и коэффициент трения каждой части.
FB = Усилие, когда главный вал начинает вращаться
Сил
Есть три типа сил; вертикальный, горизонтальный и наклонный. Сила меняется в зависимости от того, как она действует.
Расчет вертикальной силы
Расчет горизонтальной силы
Расчет силы наклона
Расчет момента нагрузки — шарико-винтовая передача
Расчет момента нагрузки — привод шкива
Расчет крутящего момента нагрузки — тросовый или ременной привод, реечный и шестеренный привод
Момент ускорения
Как упоминалось ранее, момент ускорения состоит из инерции и скорости ускорения.Если нам известны эти два значения, мы можем рассчитать момент ускорения.
Расчет момента ускорения ( Ta )
Если скорость двигателя изменяется, всегда нужно устанавливать момент ускорения или момент торможения.
Основная формула одинакова для всех двигателей. Однако используйте приведенные ниже формулы при вычислении момента ускорения для шаговых или серводвигателей на основе скорости импульса.
Общая формула для всех двигателей
При расчете момента ускорения для шаговых или серводвигателей на основе скорости импульса
Есть два основных профиля движения.Операция разгона / замедления является наиболее распространенной. Когда рабочая скорость низкая и инерция нагрузки мала, можно использовать режим пуска / останова.
Расчет необходимого крутящего момента ( TM )
Требуемый крутящий момент рассчитывается путем умножения суммы крутящего момента нагрузки и крутящего момента ускорения на коэффициент безопасности.
Расчет эффективного момента нагрузки ( Trms ) для серводвигателей и бесщеточных двигателей серии BX
Когда требуемый крутящий момент двигателя изменяется со временем, определите, можно ли использовать двигатель, вычислив эффективный момент нагрузки.Эффективный крутящий момент нагрузки становится особенно важным для режимов работы, таких как операции с быстрым циклом, когда ускорение / замедление является частым. Рассчитайте эффективный момент нагрузки при выборе серводвигателей или бесщеточных двигателей серии BX.
Скорость
Скорость определяется путем вычисления расстояния, разделенного на время. Для шаговых или серводвигателей необходимо также учитывать время разгона.
Расчет стандартной скорости
Скорость = Расстояние / Время
Для шаговых или серводвигателей
Скорость = Расстояние / (Время — Время разгона ( t1 )
Хотите узнать больше?
Группа технической поддержки и инженеры компании
Oriental Motor будут работать с вами, чтобы определить лучшее решение для вашего приложения.Опытные члены команды ORIENTAL MOTOR знают технологию от и до. Мы найдем подходящее решение в соответствии с вашими потребностями и объясним альтернативы. Позвоните по телефону 1-800-GO-VEXTA (468-3982), чтобы поговорить с членом группы технической поддержки Oriental Motor.
Размер двигателя
стал проще | Конструкция машины
Автор: Джон Брокоу Под редакцией Леланд Тешлер Ключевые точки: Ресурсов: |
Существуют различные способы выбора электродвигателей для конкретных применений. Возможно, самый простой способ подойти к выбору двигателя — это выяснить механические или физические требования работы и согласовать электрические требования с ними.Например, если вам не хватает места или веса, сначала выберите двигатель с этими параметрами. Затем попробуйте использовать механические средства (шкивы, шестерни, зубчатые передачи, редукторы скорости и т. Д.) Для удовлетворения механических требований.
| % {[data-embed-type = «image» data-embed-id = «5df27717f6d5f267ee27f1b8» data-embed-element = «aside» data-embed-alt = «Insidepenton Com Электронный дизайн Adobe Pdf Logo Tiny» data-embed-src = «https://base.imgix.net/files/base/ebm/machinedesign/image/2016/04/insidepenton_com_electronic_design_adobe_pdf_logo_tiny.png? auto = format & fit = max & w = 1440 «data-embed-caption =» «]}% | Скачать эту статью в формате .PDF Этот тип файла включает графику и схемы с высоким разрешением, если это применимо. |
Дизайнеры обычно сначала выбирают двигатель переменного или постоянного тока или мотор-редуктор. Мотор-редукторы — это двигатели переменного или постоянного тока, обычно используемые для более высокого крутящего момента и более низкой скорости вращения. Знание требований к крутящему моменту и скорости поможет определить, нужен ли двигатель постоянного или переменного тока.
Одним из механических ограничивающих факторов электродвигателей являются подшипники. Двигатели с подшипниками обычно служат дольше, чем двигатели с втулками. Они также обычно выдерживают более перпендикулярную нагрузку на вал (радиальную нагрузку), как по горизонтали, так и по вертикали.
Независимо от того, какой крутящий момент может генерировать двигатель, он в конечном итоге достигнет точки пересечения, где либо крутящий момент падает с увеличением скорости, либо двигатель может поддерживать заданный крутящий момент только за счет более медленного вращения.Как только эти характеристики крутящего момента в зависимости от скорости будут определены, вы можете поиграть с числами, используя вышеупомянутые аксессуары.
Давайте возьмем конкретный пример двигателя Baldor Electric Co. постоянного тока, который развивает 11500 об / мин со шкивом с шагом 1 дюйм. Эта конфигурация обеспечивает линейную скорость 36 128 дюймов в минуту, или 3011 футов в минуту, или 602 дюймов в секунду. Размер шкива, конечно, можно изменить, чтобы изменить скорость или крутящий момент. Однако для некоторых приложений могут потребоваться более медленные двигатели с коробкой передач.Это игра с числами; при повышении требований к скорости грузоподъемность падает, и наоборот.
Рассмотрим пример применения этого двигателя в конвейерной или тангенциальной системе привода. Далее предположим, что необходимо распылить 1 жидкую унцию материала на 18 × 14 дюймов. площадь с помощью распылительного наконечника, который производит 0,050 галлона / мин или 0,1067 жидких унций / сек при 40 фунтах на квадратный дюйм.
Выбор двигателя начинается с определения необходимой скорости (или скорости) и крутящего момента. Затем идет ускорение, которое определяется путем определения количества времени, необходимого для движения, а затем вычисления скорости вала в об / мин.
В этом случае время определяется путем деления количества материала, подлежащего диспергированию, на скорость диспергирования, или 1 жидкая унция / 0,1067 жидких унций / сек = 9,372 сек. Чтобы определить линейную скорость, разделите длину материала на прошедшее время, или 18 дюймов / 9,372 с = 1,9206 дюймов в секунду.
Во многих случаях скорость — это рабочее требование, которое определяет размер и / или тип двигателя. Примеры включают скорость, с которой вы можете переносить деталь из одного места в другое, скорость, с которой вы можете заполнить контейнер или удалить материал, или скорость рассеивания распыляемой жидкости.
Чтобы найти скорость вращения в об / мин, соответствующую этой линейной скорости, мы сначала переводим дюймы в минуту в дюймы в секунду, а затем преобразуем в обороты. В этом примере диаметр шкива составляет 1,003 дюйма. Это дает 1,9203 дюйма в секунду × 60 с / мин × 1 об / (1,003 дюйма × π) = 36,57 об / мин или 0,6 об / с.
Чтобы определить угловую скорость, ускорение и время, мы делаем упрощающее предположение, что для достижения постоянной скорости требуется 1 линейный дюйм. Затем мы определяем соответствующую длину дуги для поворотной системы, которая составляет 1 дюйм./ π = 0,3183 дюйма. Формула для определения угла дуги взята из Справочника по машинному оборудованию . Чтобы использовать его, мы сначала определяем радиус шкива, 1,003 / 2 = 0,5015. Используя радиус шкива и соответствующую длину дуги, мы получаем угол дуги (57,296 × 0,3183) / 0,5015 = 36,3655 десятичных градусов или 0,6347 радана. Здесь 57,296 — это константа из Справочника по машинному оборудованию .
Чтобы определить конечную угловую скорость, мы разделим линейную скорость на радиус шкива, 1,9206 дюймов / 0,5915 дюйма.= 3,8297 рад / сек. Чтобы определить окончательное угловое ускорение, мы используем соотношение для ускорения
а = В 2 / 2θ
, где θ = угол дуги и V = линейная скорость: (3,8297 рад / сек 2 ) / (2 × 0,6347) = 11,5540 рад / сек. 2
Окончательное угловое время или время, необходимое для достижения скорости, определяется соотношением t2 = 2θ / ω. Решение относительно t дает √ ((2 × 0,6347 рад) / 11,554 рад / сек 2 ) = 0,3315 сек.
Конечно, двигатель должен обеспечивать больший крутящий момент, если системе требуется более высокая скорость ускорения или более короткая дистанция разгона.Чем больше крутящий момент доступен, тем быстрее происходит ускорение для достижения заданной скорости.
Далее идет расчет инерции нагрузки. При перемещении реальных объектов, а не только теоретических примеров, нагрузка на двигатель — это больше, чем просто нагрузка, создаваемая перемещаемым объектом. Он также состоит из нагрузки, состоящей из шкивов, ремней, муфт, валов, устройств натяжения ремня и любого другого объекта между двигателем и перемещаемым объектом. Чтобы правильно рассчитать двигатель, вы должны определить общую инерцию всех этих компонентов, когда они действуют на вал двигателя.В этой задаче иногда может быть проще использовать фактический вес (преобразованный в массу) объектов, чем рассчитывать требования к инерции.
В нашем примере, скажем, система состоит из: нагрузки на 96,0 унции, двух шкивов по 1,0 унции каждый и ремня на 0,8 унции. Используя общее уравнение для инерции I = mr 2 , где m = масса и r = расстояние до оси вращения, затем общая инерция двигателя, I = (96 унций × (0.5015 дюймов) 2 ) + (0,8 унции × (0,5015 дюйма) 2 ) + ((1 унция × 0,50152 дюйма) × 2) = 24,8484 унции на дюйм. 2
Далее следует рассмотрение трения. Скажем, в этом примере вы используете обычную конфигурацию, состоящую из двух направляющих с четырьмя опорами каретки, несущими нагрузку. Каждая из четырех подушек каретки имеет коэффициент трения 0,17. Сила трения, F = мкН, где μ = коэффициент трения и Н, = сила, перпендикулярная поверхности.В данном случае Н = просто масса груза. Таким образом, соотношение уменьшается до F = (96 унций × (4 × 0,17) = 65,28 унций. Это соотношение, в свою очередь, умножается на расстояние до оси вращения: 65,28 унций × 0,5015 дюйма = 32,738 унций на дюйм.
Чтобы определить общий крутящий момент, мы сначала определяем крутящий момент, необходимый для ускорения. Первым шагом является преобразование полной инерции из унций-дюймов2 в унций-дюймов-сек2. Это простое преобразование, которое состоит из умножения общей инерции на коэффициент, считанный из таблицы преобразования инерции / крутящего момента, доступной из различных источников: 24.8484 унций в дюймах. 2 × 0,00259 = 0,0643573 унция-дюйм-сек 2 . Затем это число умножается на угловую скорость и делится на время, необходимое для достижения этой скорости: (0,0643573 унций-дюймов-сек 2 × 3,8297 рад / сек) / 0,3315 сек = 0,7435 унций-дюймов. Наконец, мы добавляем силу, необходимую для преодоления трения: 0,7435 унций на дюйм. + 32,738 унций = 33,482 унций на дюйм. Таким образом, большая часть крутящего момента для ускорения необходима для преодоления трения.
Процесс определения крутящего момента, необходимого для постоянной нагрузки, аналогичен.Единственное различие в уравнении состоит в том, что вместо угловой скорости используется рассчитанная ранее линейная скорость, а деление производится на время распыления, также рассчитанное ранее, а не на время ускорения. Это дает (0,0643573 унций-дюймов-сек 2 × 1,9206 дюймов в секунду) / 9,372 секунды = 0,0132 унций-дюймов. К этому мы еще раз добавляем силу, необходимую для преодоления трения: 0,0132 унции на дюйм. + 32,738 унций = 32,751 унций на дюйм. И снова большая часть крутящего момента идет на преодоление трения. Общий крутящий момент — это просто сумма крутящего момента, необходимого для ускорения и выдерживания постоянной нагрузки: 33.482 + 32,751 = 66,233 унций на дюйм.
Следует отметить, что крутящий момент для ускорения не всегда будет примерно таким же, как крутящий момент для постоянной нагрузки, как в этом случае. Не думайте, что вы можете просто удвоить крутящий момент для постоянной нагрузки и удовлетворить требования к общему крутящему моменту.
Определение размера
В этом примере не учитывался момент торможения. Это не требуется при решении для максимального крутящего момента, если он не превышает крутящий момент, необходимый для ускорения. Еще один совет: не используйте удерживающий момент для определения размера двигателя.Удерживающий момент показывает, сколько двигатель выдержит при 0 об / мин.
Как только этот анализ приводит к конкретному двигателю, разработчик должен вернуться и добавить инерцию двигатель-ротор к расчету и пересчитать, чтобы убедиться, что общий требуемый крутящий момент находится внутри кривой зависимости крутящего момента от скорости. Если нет, ситуация требует двигателя большего размера. Пока требуемый крутящий момент и скорость поддерживаются ниже профиля двигателя (с коэффициентом безопасности), все другие проблемы не имеют значения.
Еще один момент, о котором следует помнить: боковая нагрузка (радиальная нагрузка) и вылет устанавливаются производителем двигателя. Их нельзя превышать. Это приведет к преждевременной поломке двигателя. Наконец, когда двигатель установлен, лучше всего эмпирически измерить фактический крутящий момент, необходимый для перемещения нагрузки, и найти боковую нагрузку на двигатель.
Обычной практикой является включение фактора безопасности при выборе двигателя для учета невидимых проблем. Например, расчеты, требующие 66 унций-дюйм.двигатель может привести к использованию следующего размера, 100 унций-дюйм. двигателя, чтобы обеспечить коэффициент безопасности 1,7. Общие коэффициенты безопасности находятся в диапазоне от 1,5 до 2,0.
Эмпирические измерения могут подтвердить расчеты. В приведенном выше примере простая рыбья чешуя может дать показание силы при испытании на растяжение, чтобы определить величину силы, необходимую для перемещения груза.
Одним из факторов, который следует учитывать, является отношение инерции нагрузки к ротору. Эта сущность имеет тенденцию быть важной, когда двигатель должен ускоряться с некоторой точностью или быстро останавливаться.По сути, это соотношение того, насколько быстро двигатель будет ускоряться или замедляться своей собственной массой. Это, в свою очередь, влияет на точность положения вала двигателя.
Baldor Electric Co. рекомендует поддерживать отношение нагрузки к инерции ротора ниже 5: 1. Если нет никаких требований к точности, кроме пуска или останова двигателя, разработчикам нужно только сделать так, чтобы требования к скорости и крутящему моменту попадали в профиль зависимости скорости от крутящего момента с допустимым коэффициентом безопасности. Если отношение инерции ротора к нагрузке слишком велико, проблема будет в перерегулировании или занижении положения остановки.Вал может даже колебаться вперед и назад, пока не займет правильное положение.
Таким образом, потребность в точности или ее отсутствие определяет, должна ли инерция нагрузки к ротору быть важным параметром конструкции. Система с соотношением 1: 1 будет иметь оптимальную точность. Система с соотношением 2: 1 или хуже будет хуже.
В качестве примера рассмотрим инерцию из предыдущего примера и двигатель, имеющий инерцию ротора 0,00143 унций-дюймов-сек. 2 . Мы преобразуем в те же единицы (используя информацию из широко доступных таблиц), чтобы найти соотношение: 0.00143 унций-дюймов-сек 2 × 386 дюймов в секунду 2 = 0,55198 унций-дюймов. 2 Затем 24,8484 унции дюйма 2 / 0,55198 унции дюйма 2 = 45. Таким образом, соотношение будет 45: 1.
При необходимости, простым решением для снижения передаточного числа является использование двигателя с большей инерцией ротора (больший вал) или добавление редуктора, чтобы максимально соответствовать нагрузке и инерции ротора. Использование редуктора снизит скорость выходного вала на редукторе и увеличит крутящий момент в соответствии со значением передаточного числа.Одним из многих преимуществ редукторов является то, что они могут выдерживать более высокие радиальные нагрузки, чем это было бы возможно, просто установив устройство непосредственно на вал двигателя.
Коробки передач
обладают значительным преимуществом, поскольку они влияют на коэффициент инерции пропорционально квадрату передаточного числа коробки передач. Таким образом, чтобы определить, какой размер редуктора необходим, мы берем √ (24,8484 унций на дюйм 2 ) / (0,55198 унций на дюйм 2 ) = 6,7. Это означает, что передаточное число 6,7: 1 округлено до 7: 1. Напомним, что с редуктором крутящий момент увеличивается, а частота вращения выходного вала падает вместе с передаточным числом.Теперь вы можете подобрать редуктор к двигателю, рассчитав его дюйм. × 1,5 (коэффициент запаса прочности) = 100 унций на дюйм. крутящего момента на выходе редуктора. Это дает 100 унций на дюйм / 7 = 14 унций на дюйм. от двигателя через коробку передач и 37 об / мин × 7 = 259 об / мин от двигателя.
В этом случае частота вращения и крутящий момент больше, чем требуется. Контроллер может точно настроить скорость вала и требования к крутящему моменту для достижения конечных значений.
© 2011 Penton Media, Inc.
Формулы и расчеты двигателей, Указатель полезных инструментов
6000
| Формулы и расчеты, приведенные ниже, следует использовать только для оценки.Заказчик обязан указать требуемые мощность двигателя, крутящий момент и время разгона для своего приложения. Продавец может пожелать проверить указанные заказчиком значения с помощью формул в этом разделе, однако, если есть серьезные сомнения относительно приложения заказчика или если заказчик требует гарантированной производительности двигателя / приложения, заказчик должен нанять инженера-электрика для точного определения расчеты. Чтобы получить подробное описание каждой формулы, нажмите на ссылки ниже, чтобы перейти прямо к ней. Практические правила (приближение)Механические формулы
Преобразование температуры° C = (° F — 32) x 5/9° F = (° C x 9/5) + 32 6000 9128 1350
| 6000
00 |
00
00
00
00
6000
00 9128 1750
1800
1850 3002,0
3092,0
3182,0
3272,0
3362,0 1038,8
1066,6
1094,3
1121,1 1900
1950
2000 060
3542.0
3632.0
3722.0
Высокоинерционные нагрузки
| t = | WK 2 x об / мин 9 средн. | —— | WK 2 = инерция в фунт-фут. 2 t = время разгона в сек. T = Av. ускоряющий момент фунт-фут. |
| T = | WK 2 x об / мин 308 xt |
2 910 Частота и количество полюсов электродвигателей переменного тока
| Инерция, отраженная двигателю = инерция нагрузки | Обороты нагрузки Обороты двигателя |
| n s = | 120 xf P | —— | f = | P xn s 120 | — — | P = | 120 xf n s |
Взаимосвязь между мощностью, крутящим моментом и скоростью
915
| л.с. = | T xn 5250 | T = | 5250 HP n | —— | n = | 5250 HP T |
скольжение двигателя
| % Slip = | n n s | x 100 |
6
0
0 9118 9118 9117 910 9117 910 9117
| Код | кВА / л.с. | Код | кВА / л.с. кВА / л.с. | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| A | 0-3.14 | F | 5,0 -5,59 | L | 9,0-9,99 | S | 16,0-17,99 | |||
| 910-310 910 3,15 | 5,6 -6,29 | M | 10,0-11,19 | T | 18,0-19,99 | |||||
| C | 3,55-3,99 910 H111086 | 6 910.3-7,09 | N | 11,2-12,49 | U | 20,0-22,39 | ||||
| D | 4,0 -4,49 | 6 | P | 12,5-13,99 | V | 22,4 и более поздних версий | ||||
| E | 4,5 -4,99 | K | 8,0 -8,99000 | 0-15,99 |
Обозначения
36
частота в циклах в секунду (CPS)
9 1536 EFF| I | = | ток в амперах | ||
| 10 E 910 910 910 910 915 36 вольт напряжение | = | мощность в киловаттах | ||
| кВА | = | полная мощность в киловольт-амперах | ||
| л.с. | = | выходная мощность в лошадиных силах | 910 | n 909 двигатель скорость в оборотах в минуту (об / мин) |
| нс | = | синхронная скорость в оборотах в минуту (об / мин) | ||
| P | = | количество полюсов | ||
| T | = | крутящий момент в фунт-футах | ||
| = | КПД в десятичном виде | |||
| PF | = | Коэффициент мощности в десятичном формате |
Эквивалентная инерция
В механических системах все вращающиеся части обычно не работают с одинаковой скоростью .Таким образом, нам нужно определить «эквивалентную инерцию» каждой движущейся части при определенной скорости первичного двигателя.
Общий эквивалент WK 2 для системы представляет собой сумму WK 2 каждой части, относящуюся к скорости первичного двигателя.
Уравнение говорит:
6 6 N 2 прайм
Это уравнение становится общим знаменателем, на котором могут основываться другие вычисления.Для устройств с регулируемой скоростью инерция сначала должна быть рассчитана на низкой скорости. Давайте посмотрим на простую систему, которая имеет первичный двигатель (PM), редуктор и нагрузку.
Формула утверждает, что эквивалент системы WK 2 равен сумме WK 2 частей на оборотах первичного двигателя, или в данном случае: Примечание: Обороты редуктора = Обороты нагрузки Эквивалент WK 2 равен WK 2 первичного двигателя плюс WK 2 нагрузки.Это равно WK 2 первичного двигателя, плюс WK 2 времен редуктора (1/3) 2 , плюс WK 2 времени нагрузки (1/3) 2 . Это отношение редуктора к ведомой нагрузке выражается формулой, приведенной ранее:
Другими словами, когда деталь вращается со скоростью (N), отличной от первичного двигателя, WK 2 EQ равен WK 2 квадрата передаточного отношения детали. В этом примере результат может быть получен следующим образом: Эквивалент WK 2 равен: Наконец:
Общий эквивалент WK 2 — это WK 2 , видимый тягачом на его скорости. Электрические формулы (Дополнительные формулы см. В разделе «Формулы»)I = Амперы; E = Вольт; Eff = Эффективность; pf = коэффициент мощности; кВА = Киловольт-амперы; кВт = Киловатт Ток заторможенного ротора (IL) Из данных паспортной таблички/ л.с.
Название двигателя: 100007 , 3 фазы, 460 Вольт, код F.
Влияние линейного напряжения на ток заторможенного ротора (IL) (прибл.)
Основные расчеты мощности в лошадиных силахЛошадиная сила — это работа, выполненная в единицу времени. Один HP равен 33 000 фут-фунт работы в минуту. Когда источник крутящего момента (T) выполняет работу по вращению (M) вокруг оси, выполняемая работа составляет:
При вращении со скоростью N об / мин доставленное HP составляет:
Для вертикального или подъемного движения:
Для вентиляторов и нагнетателей:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||