Двигатель постоянного тока
ДПТ
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
Электродвигатели постоянного тока, намного меньше распространены, нежели двигатели переменного тока. Это связано в первую очередь со сравнительной дороговизной, более сложным устройством, сложностями в обеспечении питания. Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Электродвигатели постоянного тока применяются в качестве тяговых двигателей, в электротранспорте, в качестве различных исполнительных устройств.
Устройство двигателей постоянного тока
Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия. На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока. Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока. Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
Принцип действия
Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнит с полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.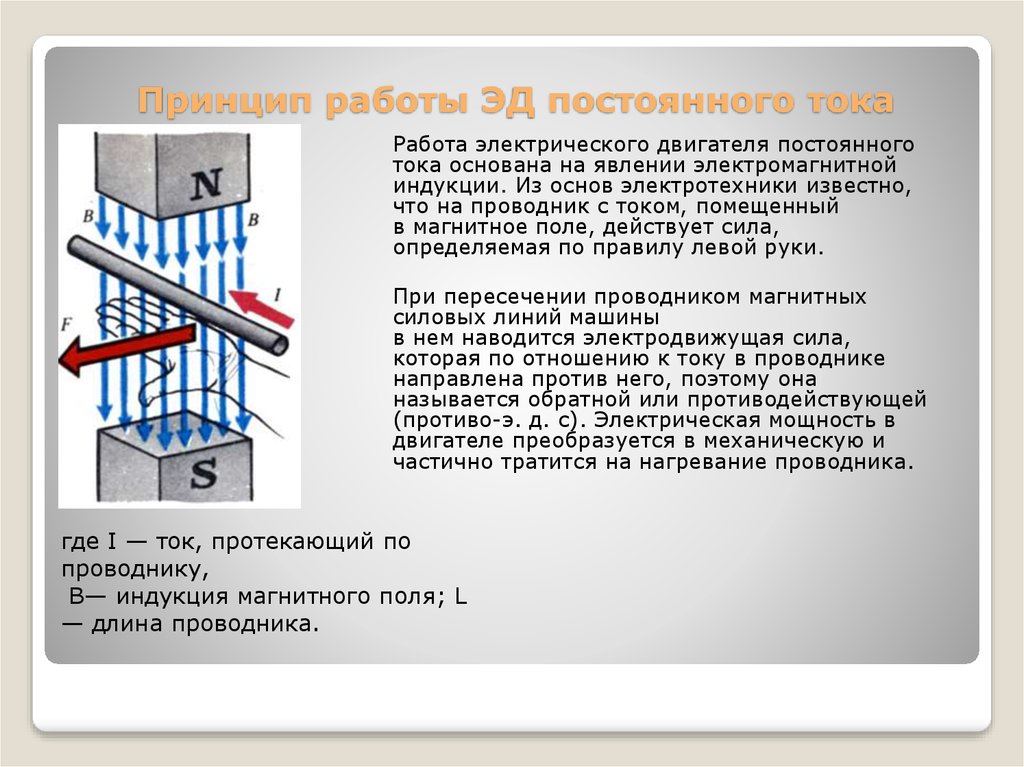
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле
Где Ф – магнитный поток возбуждения, n – частота вращения, а Cе это конструктивный момент машины, который остается для нее постоянным.
Напряжение на зажимах больше чем противоЭДС на величину падения напряжение в якорной цепи.
А если домножить это выражение на ток, то получим уравнение баланса мощностей.
Левая часть уравнения UIя представляет собой мощность подаваемая электродвигателю, в правой части первое слагаемое EIя представляет собой электромагнитную мощность, а второе IяRя мощность потерь в цепи якоря.
Рекомендуем прочесть статью — пуск двигателя постоянного тока.
устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.


Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое.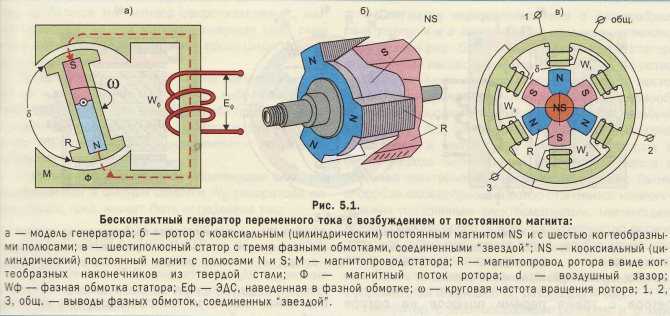 Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмоткамиРисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила.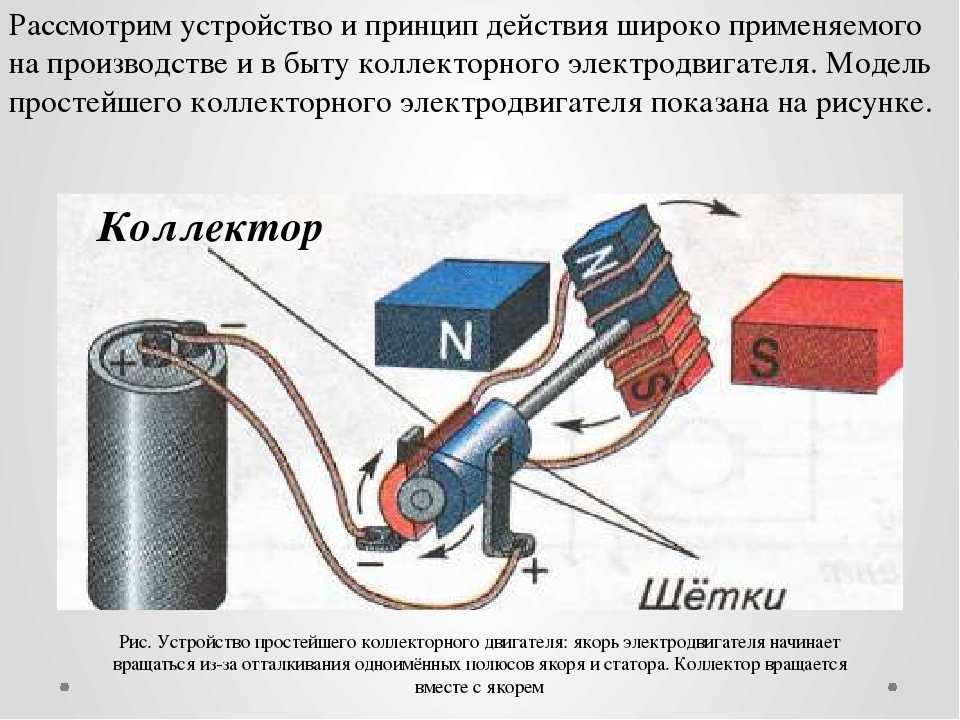 Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.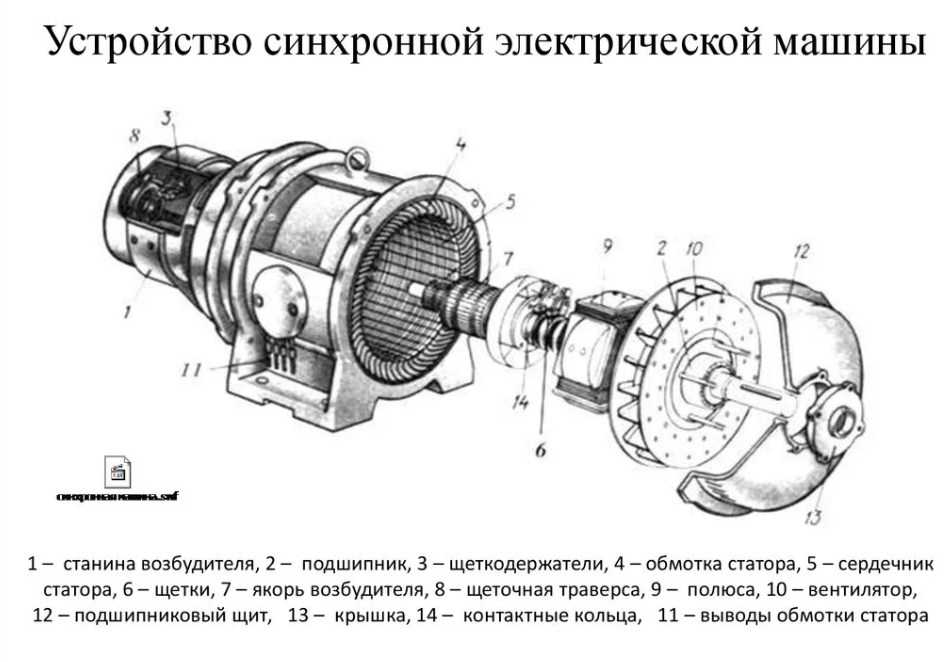
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора.
 В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.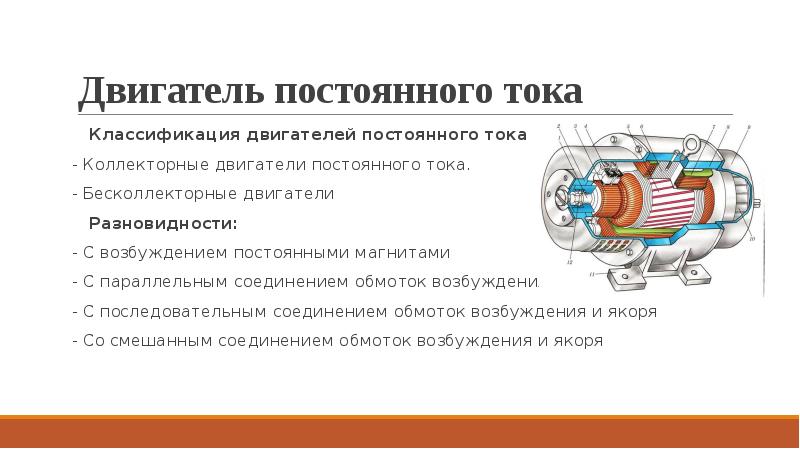
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.

Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.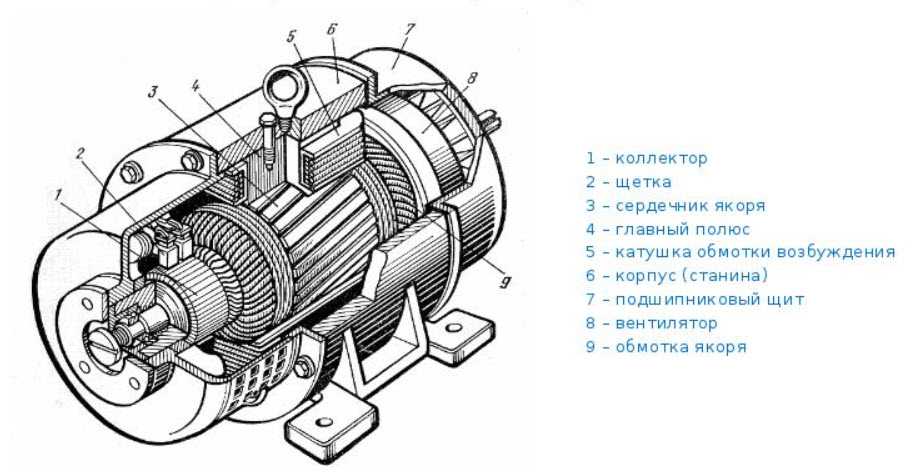
Видео в дополнение к написанному
Как работает двигатель постоянного тока?
Теоретически одна и та же машина постоянного тока может использоваться как двигатель или генератор. Поэтому конструкция двигателя постоянного тока такая же, как у генератора постоянного тока.
Поэтому конструкция двигателя постоянного тока такая же, как у генератора постоянного тока.
Принцип работы двигателя постоянного тока
Электродвигатель представляет собой электрическую машину, преобразующую электрическую энергию в механическую. Основной принцип работы двигателя постоянного тока : « всякий раз, когда проводник с током помещается в магнитное поле, на него действует механическая сила». Направление этой силы определяется правилом левой руки Флеминга, а ее величина определяется формулой F = BIL. Где B = плотность магнитного потока, I = ток и L = длина проводника в магнитном поле.
Правило левой руки Флеминга : Если мы растянем указательный, указательный и большой пальцы левой руки так, чтобы они были перпендикулярны друг другу, а направление магнитного поля представлено указательным пальцем, направление тока будет представлено вторым пальцем, тогда большой палец представляет направление силы, действующей на проводник с током.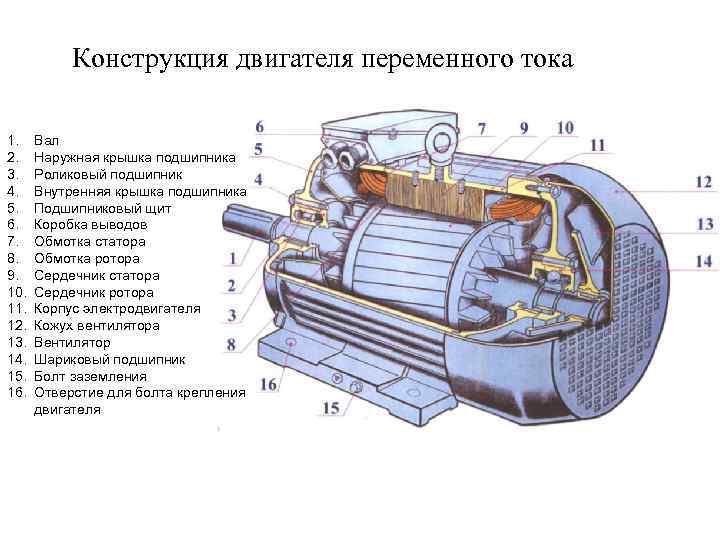
| Анимация: Работа двигателя постоянного тока (кредит: Lookang) |
Анимация выше помогает понять принцип работы двигателя постоянного тока . Когда обмотки якоря подключены к источнику постоянного тока, в обмотке возникает электрический ток. Магнитное поле может создаваться обмоткой возбуждения (электромагнетизм) или постоянными магнитами. В этом случае на токонесущие проводники якоря действует сила магнитного поля по принципу, изложенному выше.
Коллектор выполнен сегментным для достижения однонаправленного крутящего момента. В противном случае направление силы менялось бы каждый раз, когда направление движения проводника меняется на противоположное в магнитном поле. Вот как работает двигатель постоянного тока !
Обратная ЭДС
Согласно фундаментальным законам природы, никакое преобразование энергии невозможно, пока этому преобразованию не будет противодействовать. В случае генераторов это противодействие обеспечивается магнитным сопротивлением, а в случае двигателей постоянного тока обратная ЭДС .
В случае генераторов это противодействие обеспечивается магнитным сопротивлением, а в случае двигателей постоянного тока обратная ЭДС .
Когда якорь двигателя вращается, проводники также пересекают линии магнитного потока и, следовательно, в соответствии с законом электромагнитной индукции Фарадея в проводниках якоря индуцируется ЭДС. Направление этой ЭДС индукции таково, что она противодействует току якоря (I a ). Принципиальная схема ниже иллюстрирует направление противо-ЭДС и тока якоря . Величина обратной ЭДС может быть задана уравнением ЭДС генератора постоянного тока.
Значение противо-ЭДС:
Величина противо-ЭДС прямо пропорциональна скорости двигателя. Предположим, что нагрузка на двигатель постоянного тока внезапно уменьшилась. В этом случае требуемый крутящий момент будет мал по сравнению с текущим крутящим моментом. Скорость двигателя начнет увеличиваться из-за избыточного крутящего момента. Следовательно, будучи пропорциональна скорости, величина обратной ЭДС также будет увеличиваться. С увеличением противоЭДС ток якоря начнет уменьшаться. Крутящий момент пропорционален току якоря, он также будет уменьшаться, пока не станет достаточным для нагрузки. Таким образом, скорость мотора будет регулироваться.
Следовательно, будучи пропорциональна скорости, величина обратной ЭДС также будет увеличиваться. С увеличением противоЭДС ток якоря начнет уменьшаться. Крутящий момент пропорционален току якоря, он также будет уменьшаться, пока не станет достаточным для нагрузки. Таким образом, скорость мотора будет регулироваться.
С другой стороны, если двигатель постоянного тока внезапно нагружается, нагрузка вызывает снижение скорости. Из-за уменьшения скорости обратная ЭДС также уменьшится, что приведет к большему току якоря. Увеличенный ток якоря увеличит крутящий момент, чтобы удовлетворить требования нагрузки. Следовательно, наличие противо-ЭДС делает двигатель постоянного тока «саморегулирующимся» .
Типы двигателей постоянного тока
Двигатели постоянного тока обычно классифицируются на основе их конфигурации возбуждения следующим образом —
- Отдельное возбуждение (обмотка возбуждения питается от внешнего источника)
- Самовозбуждение —
- Последовательная обмотка (обмотка возбуждения соединена последовательно с якорем)
- Шунтовая обмотка (обмотка возбуждения подключена параллельно якорю)
- Составная рана —
- Длинный шунт
- Короткий шунт
Таблицу классификации машин постоянного тока см. здесь.
здесь.
Принцип работы двигателя постоянного тока
Двигатель постоянного тока представляет собой электрическую машину, которая преобразует электрическую энергию в механическую .
Работа двигателя постоянного тока основана на том принципе, что когда проводник с током помещается в магнитное поле, на него действует механическая сила.
Направление механической силы определяется правилом левой руки Флеминга , а ее величина определяется как F = BIL Ньютон.
Работа двигателя переменного тока (асинхронного двигателя и синхронного двигателя) отличается от работы двигателя постоянного тока.
Принципиальной разницы в конструкции генератора постоянного тока и двигателя постоянного тока нет. Фактически, одна и та же машина постоянного тока может использоваться как генератор или как двигатель.
Как и генераторы, существуют различные типы двигателей постоянного тока, которые также подразделяются на двигатели постоянного тока с параллельными, последовательными и составными обмотками .
Двигатели постоянного тока редко используются в обычных целях, поскольку все электроснабжающие компании поставляют двигатели переменного тока.
Однако для специальных применений, таких как сталелитейные заводы , шахты и электропоезда , выгодно преобразовывать переменный ток в постоянный, чтобы использовать двигатели постоянного тока. Причина в том, что характеристики скорости/крутящего момента двигателей постоянного тока намного лучше, чем у двигателей переменного тока.
Поэтому неудивительно, что для промышленных приводов двигатели постоянного тока так же популярны, как и трехфазные асинхронные двигатели.
Содержание
Принцип действия двигателя постоянного тока
Машина, преобразующая электрическую энергию постоянного тока в механическую, называется двигателем постоянного тока.
Работа двигателя постоянного тока основана на том принципе, что когда проводник с током помещается в магнитное поле, на проводник действует механическая сила.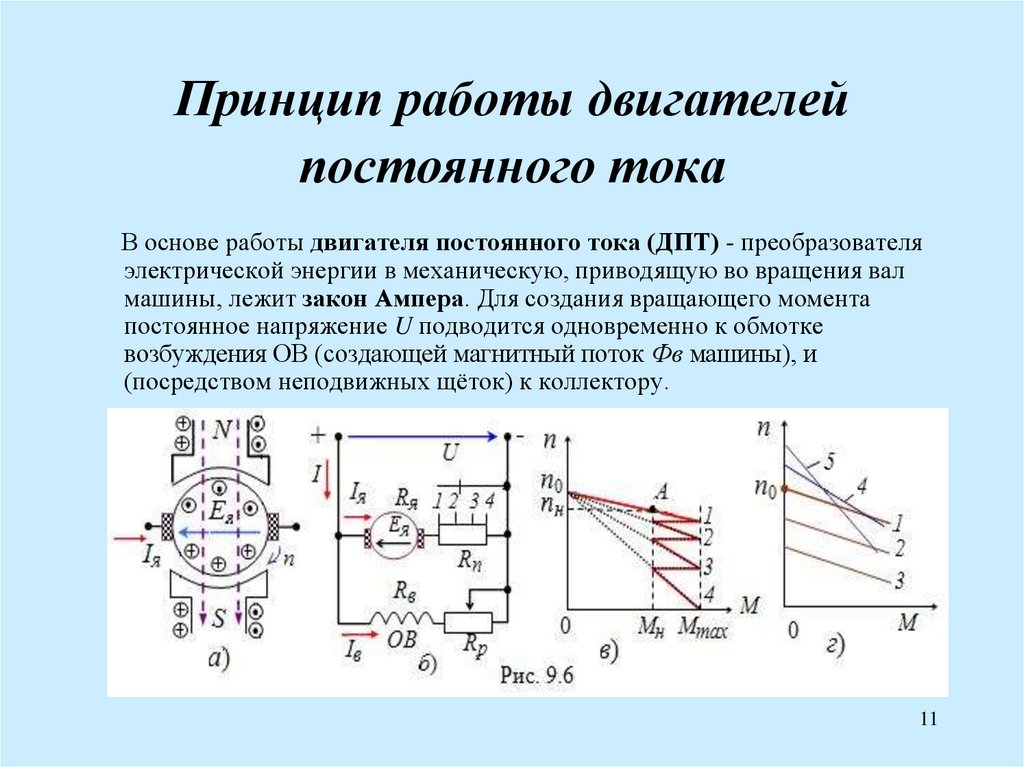
Направление этой силы определяется правилом левой руки Флеминга , а величина определяется по формуле;
F = BIL Ньютон
Согласно правилу левой руки Флеминга, когда электрический ток проходит через катушку в магнитном поле, магнитная сила создает крутящий момент, который вращает двигатель постоянного тока.
Направление этой силы перпендикулярно проводу и магнитному полю.
Правило левой руки Флеминга
По сути, нет никакой конструктивной разницы между двигателем постоянного тока и генератором постоянного тока. Одна и та же машина постоянного тока может работать как генератор или двигатель.
Поперечное сечение машины постоянного тока
Работа двигателя постоянного тока
Рассмотрим часть многополярного двигателя постоянного тока , как показано на рисунке ниже. Когда клеммы двигателя подключены к внешнему источнику питания постоянного тока:
- магниты возбуждения возбуждаются, создавая чередующиеся северный и южный полюса
- проводники якоря пропускают ток.
Часть многополярного двигателя постоянного тока
Все проводники под северным полюсом пропускают ток в одном направлении, а все проводники под южным полюсом пропускают ток в противоположном направлении.
Проводники якоря под полюсом N пропускают токи в плоскость бумаги (обозначены ⊗ на рисунке). А по проводникам под S-полюсом текут токи из плоскости бумаги (обозначены ⨀ на рисунке).
Так как каждый проводник якоря течет ток и находится в магнитном поле, на него действует механическая сила .
При применении правила левой руки Флеминга становится ясно, что сила, действующая на каждый проводник, стремится повернуть якорь против часовой стрелки. Все эти силы складываются вместе, чтобы произвести крутящий момент , задающий вращение якоря.
Когда проводник перемещается с одной стороны щетки на другую, ток в этом проводнике меняется на противоположный. В то же время он попадает под влияние следующего полюса, который имеет противоположную полярность.