Драйвер шагового двигателя — как выбрать?
Драйвер шагового двигателя
Краткое введение в теорию и типы драйверов, советы по подбору оптимального драйвера для шагового двигателя.
Если вы хотите купить драйвер шагового двигателя, нажмите на информер справа
Некоторые сведения, которые могут помочь вам выбрать драйвер шагового двигателя.
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя.
Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach4 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
2) Двухуровневые драйверы
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
3) Драйверы с ШИМ.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Как выбрать драйвер шагового двигателя (ШД)
Первый параметр, на который стоит обратить внимание, когда вы решили выбрать драйвер шагового двигателя – это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Второй момент – это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно – напряжение питания влияет на динамику(момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8-10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин – стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя — тем большее напряжение требуется для драйвера. Существует эмпирическая формула U = 32 * sqrt(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера: U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы EM706, AM882, YKC2608M-H.
Если максимальное указанное напряжение питания драйвера резко отличается от данных величин – стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя — тем большее напряжение требуется для драйвера. Существует эмпирическая формула U = 32 * sqrt(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера: U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы EM706, AM882, YKC2608M-H.
Третий аспект – наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Четвертый аспект – наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Пятый аспект – протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми Вам логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5 В, вам надо только лишь на всякий случай убедиться.
Шестой аспект – наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток(в т. ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций — тем лучше.
ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций — тем лучше.
Седьмой аспект – наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако, практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, при прочих равных условиях стоит использовать деление чем больше, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Восьмой аспект – наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Девятый, и самый важный аспект – качество драйвера. Оно практически не связано с характеристиками и т.п. На рынке существует множество предложений, и иногда характеристики драйверов двух производителей совпадают практически до запятой, а установив их по очереди на станок, становится ясно, что один из производителей явно занимается не своим делом, и в производстве недорогих утюгов ему больше повезет. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом — ориентироваться на бренды.
Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом — ориентироваться на бренды.
В разработке электроники для шаговых двигателей давно удерживает пальму первенства корпорация Leadshine, продукцию которой мы и рекомендуем использовать в станках с ЧПУ.
DARXTON
Драйверы шаговых двигателей KIPPRIBOR · Овен-Уфа — средства автоматизации производства
Драйверы шаговых двигателей KIPPRIBOR серии SMD предназначены для управления шаговыми двигателями. Драйвер позволяет интерпретировать команды контроллера в последовательность коммутационных состояний выходных элементов, питающих обмотки шагового двигателя. Таким образом происходит преобразование команд контроллера во вращательное движение ротора двигателя, причем параметры преобразования четко заданы драйвером с учетом характеристик подключенного двигателя.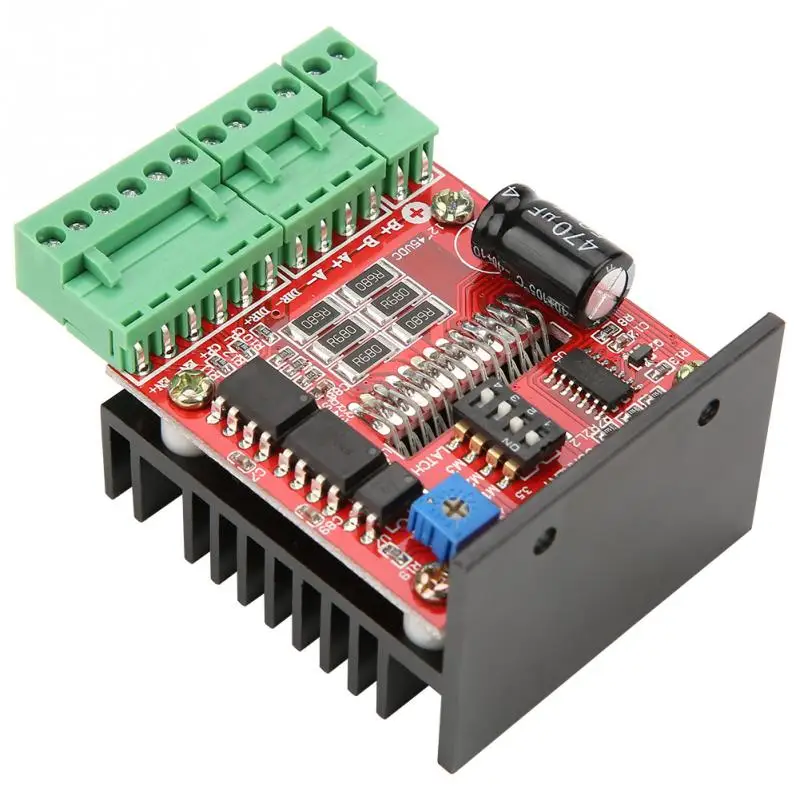
Основные особенности драйверов гибридных шаговых двигателей KIPPRIBOR серии SMD:
- Драйверы серии SMD построены с применением прогрессивных технологий построения шагового привода и современной элементной базы, в том числе с применением 32-битного DSP-процессора.
- Все драйверы имеют оптическую развязку силовых цепей, что предотвращает повреждение контроллера и двигателя в резуль-тате пробоя силового ключа.
- Максимальная частота управляющих импульсов 200 кГц.
- Дискретное ограничение фазного тока обмоток позволяет согласовать драйвер с конкретным двигателем.
- Функция микрошагового режима управления с коэффициентом до 1/256 для повышения точности позиционирования.
- Функция снижения уровня шума и вибраций.
- В линейке представлены драйверы с питанием от источника постоянного тока и с универсальным питанием.
Технические характеристики драйверов гибридных шаговых двигателей KIPPRIBOR серии SMD:
| Параметр | Значение | |||||
| Модификация драйвера | SMD-M430D | SMD-DM542 | SMD-M545D | SMD-DM556D | SMD-M860D | SMD-DM860D |
| Напряжение питания драйвера | 18…40 VDC | 18…50 VDC | 24…50 VDC | 24…50 VDC | 24…80 VDC | 24…80 VDC/ 20…60 VAC |
| Максимальная частота управляющих импульсов | 100 кГц | 200 кГц | 200 кГц | 200 кГц | 200 кГц | 200 кГц |
| Максимальный ток фазы шагового двигателя | 3 А | 4,2 А | 4,5 А | 5,6 А | 7,2 А | 7,2 А |
| Количество установок микрошагового режима | 7 | 15 | 14 | 16 | 14 | 16 |
| Максимальный коэффициент деления шага | 1/64 | 1/128 | 1/256 | 1/256 | 1/256 | 1/256 |
| Оптическая развязка силовых цепей драйвера | Да | |||||
| Дополнительные функции | Понижение шума, понижение вибраций, функция защиты двигателя | |||||
Габаритные и установочные размеры драйверов шаговых двигателей KIPPRIBOR серии SMD:
SMD-M430D
SMD-M545D, SMD-DM542, SMD-DM556D
SMD-M860D
SMD-DM860D
Схемы подключения драйверов шаговых двигателей KIPPRIBOR серии SMD:
SMD-M430D | SMD-DM542 | SMD-M545D |
SMD-DM556D | SMD-M860D | SMD-DM860D |
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Pololu — Драйверы шаговых двигателей
Драйверы шаговых двигателей специально разработаны для управления шаговыми двигателями, которые способны непрерывно вращаться с точным контролем положения даже без системы обратной связи. Наши драйверы шаговых двигателей предлагают регулируемое управление током и многошаговое разрешение, а также они оснащены встроенными преобразователями, которые позволяют управлять шаговым двигателем с помощью простых шагов и направлений. Эти модули, как правило, представляют собой базовые платы-носители для различных ИС драйверов шаговых двигателей, которые предлагают низкоуровневые интерфейсы, такие как входы для непосредственного запуска каждого шага. Для генерации этих сигналов низкого уровня обычно требуется внешний микроконтроллер.
Большинство наших драйверов шаговых двигателей доступны в компактном (0,6″×0,8″) форм-факторе, совместимом по выводам. В следующих двух таблицах, упорядоченных по возрастанию рабочего напряжения, сравнивается наш выбор:
| STSPIN220 | ДРВ8834 | A4988 (оригинал) | A4988, Черный Ed. 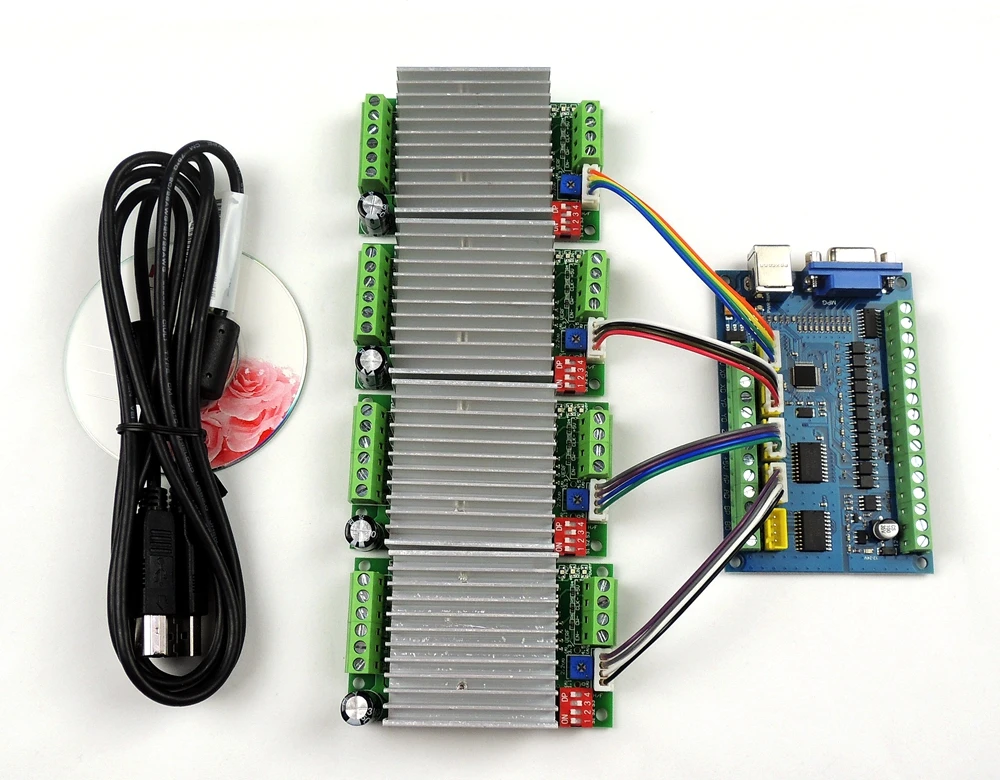 | MP6500, Пот. СС | MP6500, Цифровой CC | |
|---|---|---|---|---|---|---|
| Чип драйвера: | STSPIN220 | ДРВ8834 | А4988 | МП6500 | ||
| Минимальное рабочее напряжение: | 1,8 В | 2,5 В | 8 В | 4,5 В | ||
| Максимальное рабочее напряжение: | 10 В | 10,8 В | 35 В | 35 В | ||
| Максимальный длительный ток на фазу: (1) | 1,1 А | 1,5 А | 1 А | 1,2 А | 1,5 А | |
| Пиковый ток на фазу: (2) | 1,3 А | 2 А | 2 А | 2,5 А | 2 А | |
| Микрошаговое понижение до: | 1/256 | 1/32 | 1/16 | 1/8 | ||
| Количество слоев платы: | 4 | 4 | 2 | 4 | 4 | |
| Особенности: | цифровой ток управление | |||||
Цена за 1 шт. : : | 7,95 $ | 9,95 $ | 14,45 $ | 14,45 $ | 12,95 $ | 12,95 $ |
| 1 На несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. 2 Максимальный теоретический ток для компонентов на плате (требуется дополнительное охлаждение). | ||||||
| STSPIN820 | ДРВ8825 | ТБ67С279ФТГ | ТБ67С249ФТГ | ДРВ8434А | DRV8434S, Пот. Максимум. | DRV8434S, 2A Макс. | |
|---|---|---|---|---|---|---|---|
| Чип драйвера: | STSPIN820 | ДРВ8825 | ТБ67С279ФТГ | ТБ67С249ФТГ | ДРВ8434А | ДРВ8434С | |
| Минимальное рабочее напряжение: | 7 В | 8,2 В | 10 В | 10 В | 4,5 В | 4,5 В | |
| Максимальное рабочее напряжение: | 45 В | 45 В | 47 В | 47 В | 48 В | 48 В | |
| Максимальный длительный ток на фазу: (1) | 0,9 А | 1,5 А | 1,1 А | 1,6 А | 1,2 А | 1,2 А | |
| Пиковый ток на фазу: (2) | 1,5 А | 2,2 А | 2 А | 4,5 А | 2 А | 2 А | |
| Микрошаговое понижение до: | 1/256 | 1/32 | 1/32 | 1/32 | 1/256 | 1/256 | |
| Количество слоев платы: | 4 | 4 | 4 | 4 | 4 | 4 | |
| Особенности: | Автоматическая регулировка усиления, ADMD | Автоматическая регулировка усиления, ADMD | Обнаружение остановки, интеллектуальная настройка пульсаций контроль затухания | Управление SPI, обнаружение остановки, 8 вариантов режима затухания | |||
Цена за 1 шт.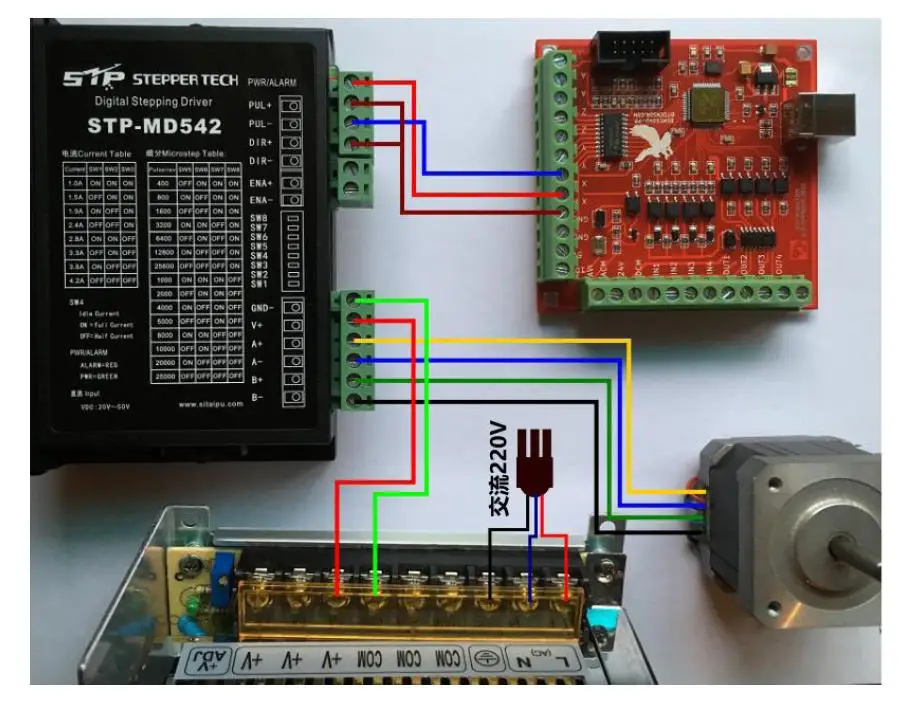 : : | 14,95 $ | 18,95 $ | 10,75 $ | 21,95 $ | 12,95 $ | 12,95 $ | 12,95 $ |
| 1 На несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. 2 Максимальный теоретический ток для компонентов на плате (требуется дополнительное охлаждение). | |||||||
В эту категорию также входят несколько более крупных модулей драйверов, которые обычно могут выдавать больший ток и предлагают больше функций, чем более компактные драйверы, указанные выше:
| TB67S279FTG Полный выход | TB67S249FTG Полный выход | АМИС-30543 | ТБ67С128ФТГ | Мощный шаговый двигатель Драйвер двигателя 36v4 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Чип драйвера: | ТБ67С279ФТГ | ТБ67С249ФТГ | АМИС-30543 | ТБ67С128ФТГ | ДРВ8711 | ||||||
| Минимальное рабочее напряжение: | 10 В | 10 В | 6 В | 6,5 В | 8 В | ||||||
| Максимальное рабочее напряжение: | 47 В | 47 В | 30 В | 44 В | 50 В | ||||||
| Максимальный длительный ток на фазу: (1) | 1,2 А | 1,7 А | 1,8 А | 2. 1 А 1 А | 4 А | ||||||
| Пиковый ток на фазу: (2) | 2 А | 4,5 А | 3 А | 5 А | 6 А | ||||||
| Микрошаговое понижение до: | 1/32 | 1/32 | 1/128 | 1/128 | 1/256 | ||||||
| Количество слоев платы: | 2 | 2 | 2 | 2 | 2 | ||||||
| Размеры: | 1,0″ × 1,4″ | 1,0″ × 1,4″ | 1,0″ × 1,2″ | 1,2″ × 1,6″ | 1,3″ × 1,2″ | ||||||
| Особенности: | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение, высокий ток | Интерфейс SPI, ШИМ с низким уровнем электромагнитных помех, сильноточный ток, микрошаг 1/128, обратная ЭДС обратная связь | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение, большой ток, микрошаг 1/128, дополнительный последовательный интерфейс | сверхвысокий ток, высокое максимальное напряжение, интерфейс SPI, микрошаг 1/256, обратная ЭДС обратная связь, обнаружение останова | ||||||
Цена за 1 шт. : : | 12,75 $ | 24,95 $ | $19,95 | 16,95 $ | 39,95 $ | ||||||
| 1 На несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. 2 Максимальный теоретический ток для компонентов на плате (требуется дополнительное охлаждение). | |||||||||||
Для более высокого уровня управления шаговым двигателем рассмотрите наши контроллеры шаговых двигателей Tic, которые имеют некоторые из тех же ИС драйверов шаговых двигателей, что и наши несущие платы, в сочетании со встроенным микроконтроллером, который интеллектуально генерирует управляющий сигнал низкого уровня. в ответ на различные интерфейсы, такие как USB для прямого подключения к компьютеру, последовательный TTL и I²C для использования с микроконтроллером, импульсы сервопривода RC для использования в системе RC, аналоговые напряжения для использования с потенциометром или аналоговым джойстиком, и квадратурный энкодер для использования с поворотным энкодером. Tics также предлагает широкий спектр настроек, которые можно настроить через USB с помощью бесплатной утилиты.
Tics также предлагает широкий спектр настроек, которые можно настроить через USB с помощью бесплатной утилиты.
Сравните все товары в этой категории
Подкатегории
Товары в категории «Драйверы шаговых двигателей»
Драйвер шагового двигателя на дискретном МОП-транзисторе позволяет управлять одним биполярным шаговым двигателем. Он поддерживает широкий диапазон рабочего напряжения от 8 В до 50 В и может обеспечивать непрерывный ток до 4 А на фазу без радиатора или принудительного воздушного потока (макс. 6 А при достаточном дополнительном охлаждении). Интерфейс SPI позволяет настроить ограничение тока, ступенчатый режим (9пошаговые режимы от полного шага до 1/256), режим затухания и обнаружение остановки. Драйвер также обеспечивает обратную связь по обратной ЭДС, которую можно использовать для более продвинутых алгоритмов управления и обнаружения опрокидывания. Дополнительные функции включают защиту от обратного напряжения, пониженного напряжения и перегрузки по току.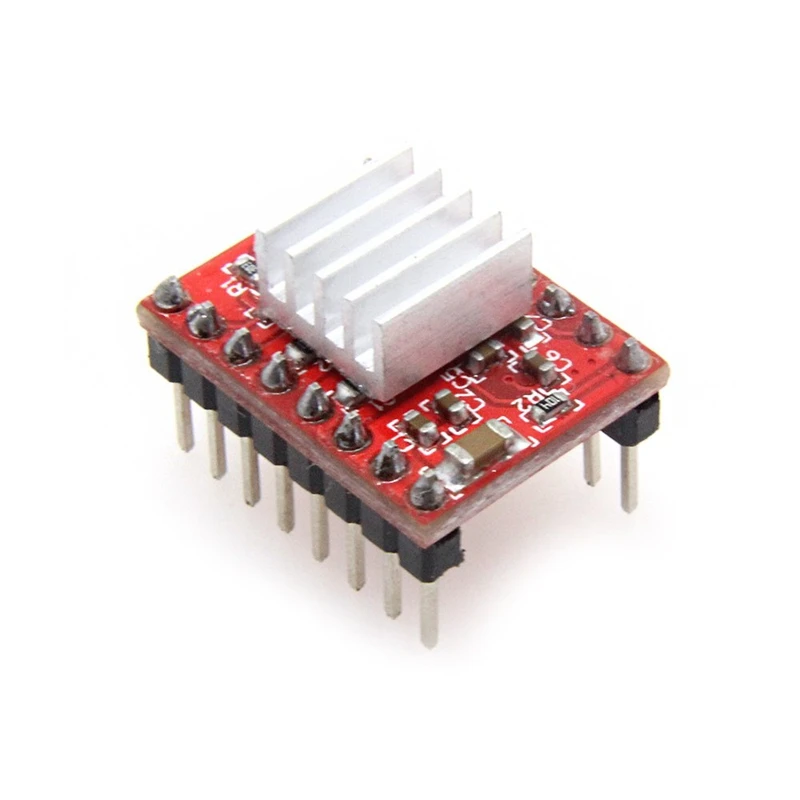
Эта коммутационная плата упрощает использование микрошагового драйвера биполярного шагового двигателя Toshiba TB67S128FTG с регулируемым ограничением тока и микрошагом до 1/128 шага. Кроме того, он имеет возможность динамически выбирать оптимальный режим затухания, контролируя фактический ток двигателя, и может автоматически снижать управляющий ток ниже полного значения, когда двигатель мало нагружен, чтобы минимизировать энергопотребление и тепловыделение. Драйвер имеет широкий диапазон рабочего напряжения от 6,5 В до 44 В и может обеспечить примерно 2,1 А на фазу непрерывно без радиатора или принудительного воздушного потока (до 5 А пикового значения). Он имеет встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наша несущая плата также добавляет защиту от обратного напряжения (до 40 В).
Это коммутационная плата для микрошагового драйвера биполярного шагового двигателя AMIS-30543 компании ON Semiconductor, который имеет ограничение тока с регулировкой SPI, 11-ступенчатые режимы (от полного шага до 1/128 шага), обратную ЭДС обратной связи, которую можно используется для обнаружения опрокидывания или дополнительного управления с обратной связью, а также для защиты от перегрузки по току и перегрева.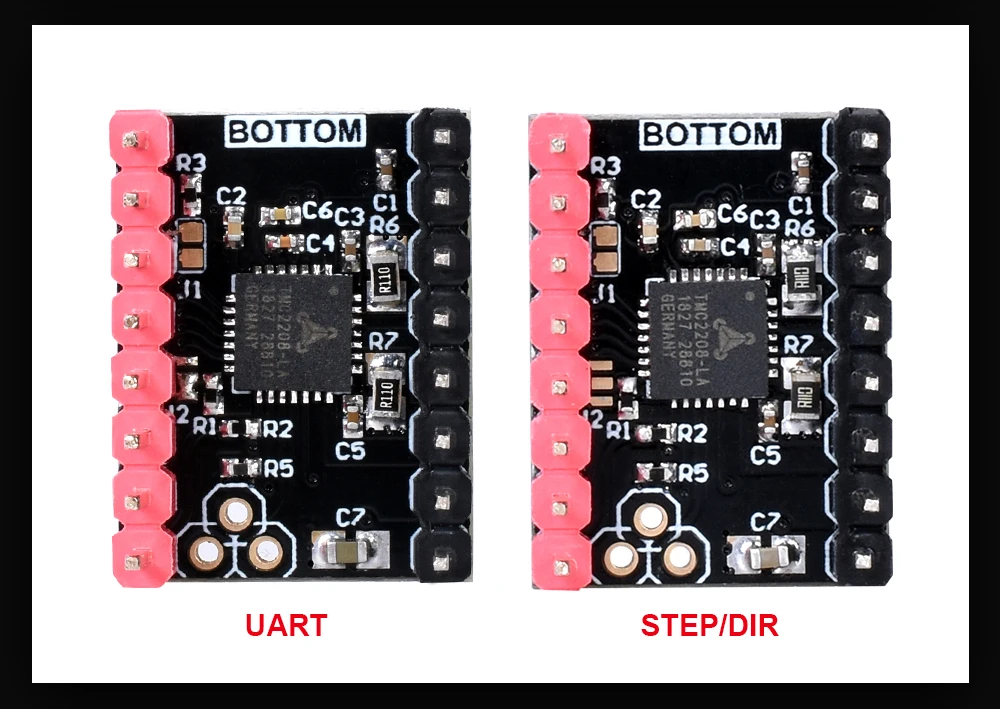 Плата работает от 6 В до 30 В и может выдавать примерно до 1,8 А на фазу без радиатора или принудительного воздушного потока (она рассчитана на 3 А на катушку при достаточном дополнительном охлаждении).
Плата работает от 6 В до 30 В и может выдавать примерно до 1,8 А на фазу без радиатора или принудительного воздушного потока (она рассчитана на 3 А на катушку при достаточном дополнительном охлаждении).
Это переходная плата для микрошагового драйвера биполярного шагового двигателя TI DRV8834. Его распиновка и интерфейс практически идентичны таковым у наших носителей A4988, поэтому его можно использовать в качестве замены этих плат во многих приложениях. DRV8834 работает в диапазоне от 2,5 до 10,8 В, что позволяет питать шаговые двигатели напряжением, слишком низким для других драйверов, и может непрерывно обеспечивать до 1,5 А на фазу без радиатора или принудительного воздушного потока (до 2 А в пиковом режиме). ). Он имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошагов разрешения (до 1/32 шага). Эта плата поставляется с 0,1-дюймовыми штыревыми штырьками, включенными в комплект, но не припаянными.
Эта версия нашего низковольтного шасси драйвера шагового двигателя DRV8834 поставляется с номером с установленными контактными штырьками , поэтому для его использования с соответствующим 16-контактным разъемом или макетной платой без пайки пайка не требуется. Дополнительную информацию о драйвере см. на странице продукта DRV8834 Low-Voltage Stepper Motor Driver Carrier.
Дополнительную информацию о драйвере см. на странице продукта DRV8834 Low-Voltage Stepper Motor Driver Carrier.
A4988 Держатель драйвера шагового двигателя
A4983/A4988 Держатель драйвера шагового двигателя с размерами. |
|---|
Обзор
Этот продукт представляет собой плату-носитель или коммутационную плату для микрошагового драйвера Allegro A4988 DMOS с преобразователем и защитой от перегрузки по току; поэтому мы рекомендуем внимательно прочитать техническое описание A4988 (1 МБ в формате pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (дополнительную информацию см. в разделе «Рассеивание мощности » ниже). Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных разрешений шага: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Настроен на смешанный режим затухания
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
- Защита от короткого замыкания на землю и нагрузки
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера A4988, установленными, как показано на изображении продукта.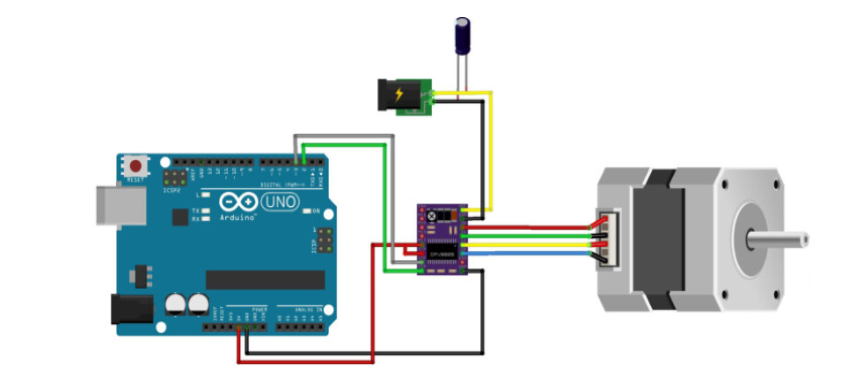
Этот продукт поставляется в индивидуальной упаковке с 0,1-дюймовыми контактными штырьками, которые входят в комплект, но не припаяны; у нас также есть версия с уже впаянными контактными штырями. Для клиентов, заинтересованных в больших объемах при более низкой удельной стоимости, мы предлагаем версию в упаковке без штырей и версию с установленными штырями.
У нас также есть множество других вариантов драйверов шаговых двигателей в том же форм-факторе с различными рабочими профилями и функциями.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Держатель драйвера шагового двигателя A4988 поставляется с одним 1×16-контактным отрывным разъемом 0,1 дюйма. Разъемы можно впаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами.)
Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами.)
Использование драйвера
Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя A4988 (полношаговый режим). |
|---|
Силовые соединения
Драйверу требуется, чтобы напряжение питания логики (от 3 В до 5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) было подключено к контактам VMOT и GND. . Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться A4988, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как A4988 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
. Микрошаговый драйвер, такой как A4988 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбрать одно из пяти ступенчатых разрешений в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние подтягивающие резисторы на 100 кОм, а MS2 имеет внутренний подтягивающий резистор на 50 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму. Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.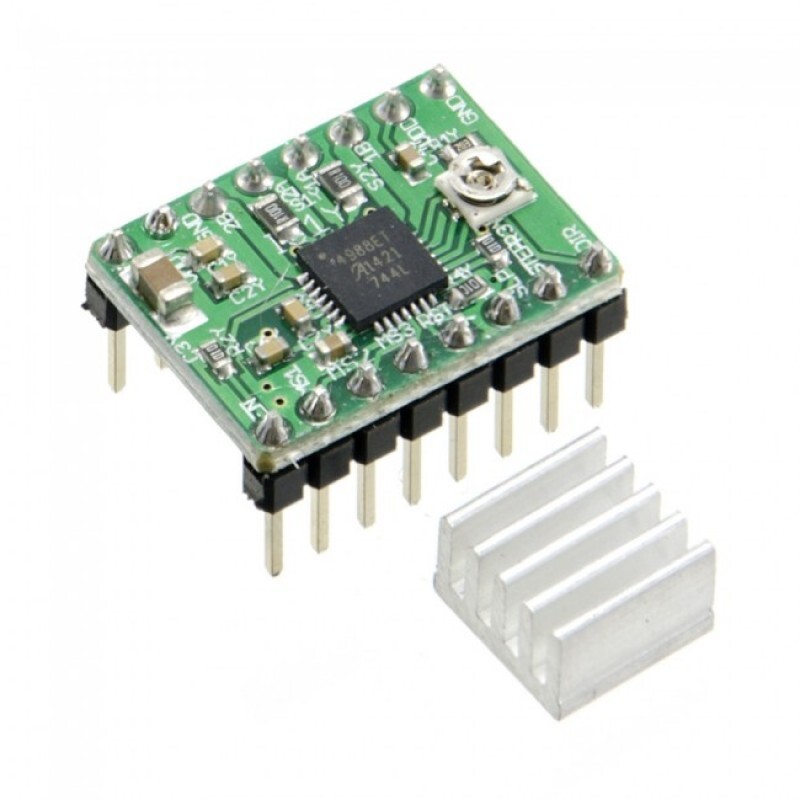
| MS1 | МС2 | МС3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | Четверть шага |
| Высокий | Высокий | Низкий | Восьмой шаг |
| Высокий | Высокий | Высокий | Шестнадцатый шаг |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Ограничение тока
Одним из способов максимизировать производительность шагового двигателя является использование максимально возможного для вашего приложения напряжения. В частности, увеличение напряжения обычно позволяет увеличить скорость шага и вращающий момент шага, поскольку ток в катушках может изменяться быстрее после каждого шага. Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен активно ограничиваться, чтобы не допустить превышения номинального тока двигателя.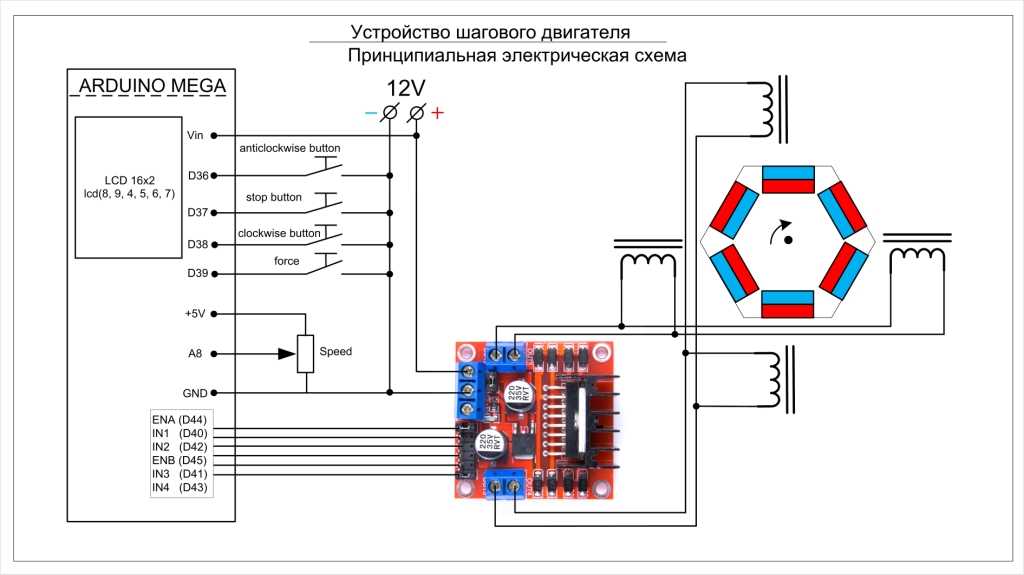
A4988 поддерживает такое активное ограничение тока, и подстроечный потенциометр на плате можно использовать для установки ограничения тока. Одним из способов установки ограничения тока является перевод драйвера в полношаговый режим и измерение тока, протекающего через одну катушку двигателя, при регулировке потенциометра ограничения тока. Это должно быть сделано с двигателем, удерживающим фиксированное положение (т. е. без тактирования входа STEP). Обратите внимание, , что измеряемый ток составляет всего 70% от фактической настройки ограничения тока , так как обе катушки всегда включены и ограничены этим значением в полношаговом режиме, поэтому, если вы позже включите микрошаговые режимы, ток через катушки сможет превысить этот измеренный полношаговый ток на 40% (1/0,7 ) на определенных шагах; пожалуйста, примите это во внимание при использовании этого метода для установки ограничения тока. Кроме того, обратите внимание, что вам нужно будет выполнить эту регулировку снова, если вы когда-либо изменяли логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Другой способ установить ограничение тока — рассчитать опорное напряжение, соответствующее желаемому ограничению тока, а затем отрегулировать потенциометр ограничения тока до тех пор, пока вы не измерите это напряжение на VREF пин. Напряжение на выводе VREF доступно через переходное отверстие, обведенное кружком в нижней части печатной платы. Ограничение по току, I MAX , относится к эталонному напряжению следующим образом: для VREF:
«V_(REF) = 8 * I_(MAX) * R_(CS)«
R CS сопротивление измерения тока; В оригинальных версиях этой платы использовались резисторы 0,050 Ом , но мы переключились на использование 9 резисторов. 0072 0,068 Ом токоизмерительных резистора в январе 2017 г., что делает более полезным диапазон регулировки потенциометра. На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
0072 0,068 Ом токоизмерительных резистора в январе 2017 г., что делает более полезным диапазон регулировки потенциометра. На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
Идентификация оригинальных чувствительных резисторов 50 мОм (слева) и 68 мОм (справа), представленных в январе 2017 г. |
|---|
Так, например, если вы хотите установить ограничение тока на 1 А и у вас есть плата с чувствительными резисторами 68 мОм, вы должны установить VREF на 540 мВ. Это гарантирует, что, даже если ток через каждую катушку меняется от шага к шагу, величина вектора тока в шаговом двигателе остается постоянной на уровне 1 А: 92) = I_(MAX) = 1 text (A)«
Если вместо этого вы хотите, чтобы ток через через каждую катушку составлял 1 А в полношаговом режиме, вам нужно установить ограничение тока на 40 %. выше, или 1,4 А, поскольку катушки ограничены примерно 70 % от установленного предельного тока в полношаговом режиме (приведенное выше уравнение показывает, почему это так).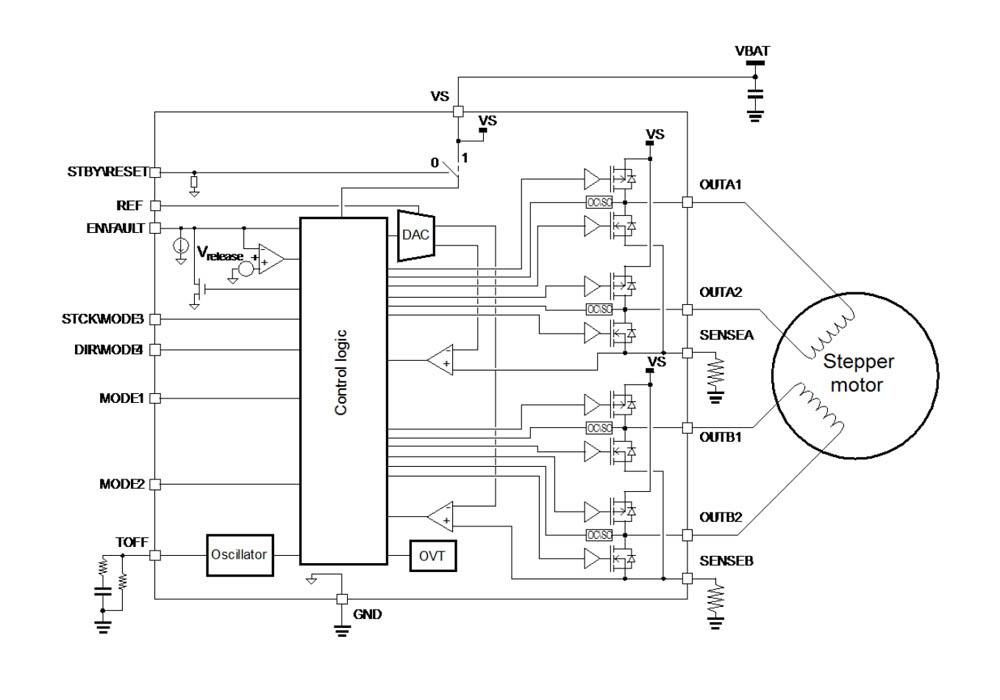 Чтобы сделать это с платой с чувствительными резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Чтобы сделать это с платой с чувствительными резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Соображения по рассеиваемой мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что вы можете обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания).