Рабочие характеристики асинхронного двигателя | мтомд.инфо
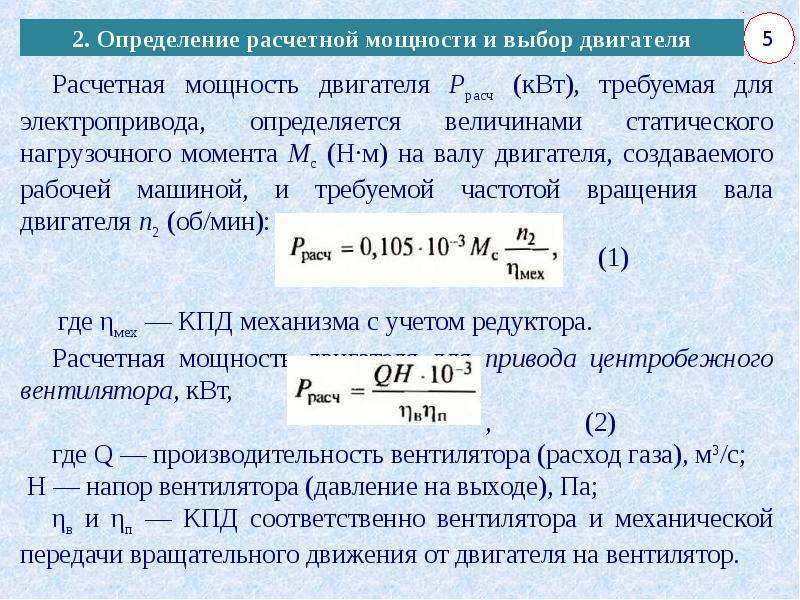
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД асинхронного двигателя η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Расчет рабочих характеристик асинхронного двигателя
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, то есть скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n2 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Рабочие характеристики асинхронного двигателя
Зависимость М2 = f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ω2 = 60 P2/(2πn2) = 9,55Р2/n2, где Р2 — полезная мощность, Вт; ω2 = 2πf2/60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 = f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 = f (P2) имеет криволинейный вид.
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°.
В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
§79. Характеристики асинхронных двигателей | Электротехника
Характеристики асинхронных двигателей.
Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика.
Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %).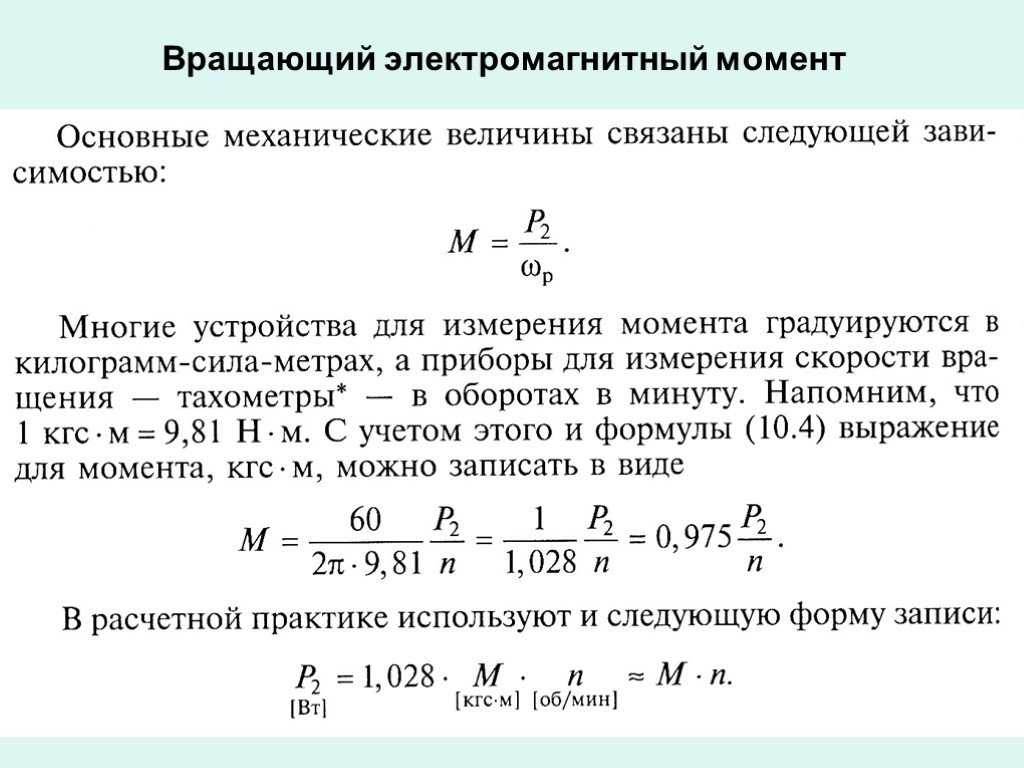 Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора.
Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора.
Как показывает кривая на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некотором скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В).
Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В).
Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками.
Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рабочие характеристики.
Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия η и cosφ1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264).
Рис. 264. Рабочие характеристики асинхронного двигателя
Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0.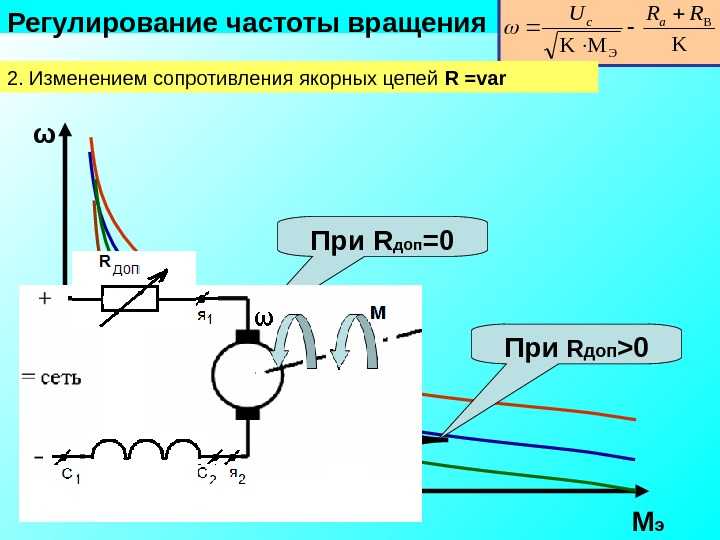 К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cosφ1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9.
Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.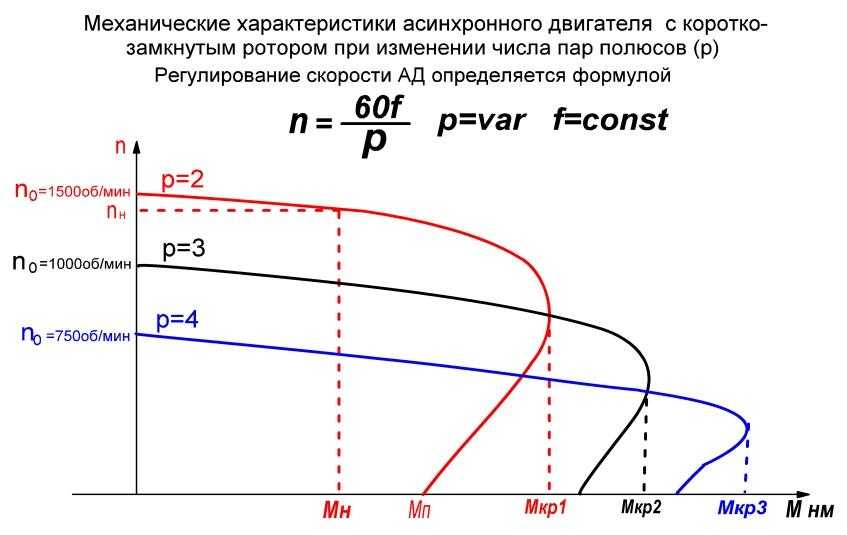
Работа при пониженном напряжении и обрыве одной из фаз.
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы).
Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении.
п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении.
Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз.
При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении.
Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты.
Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения.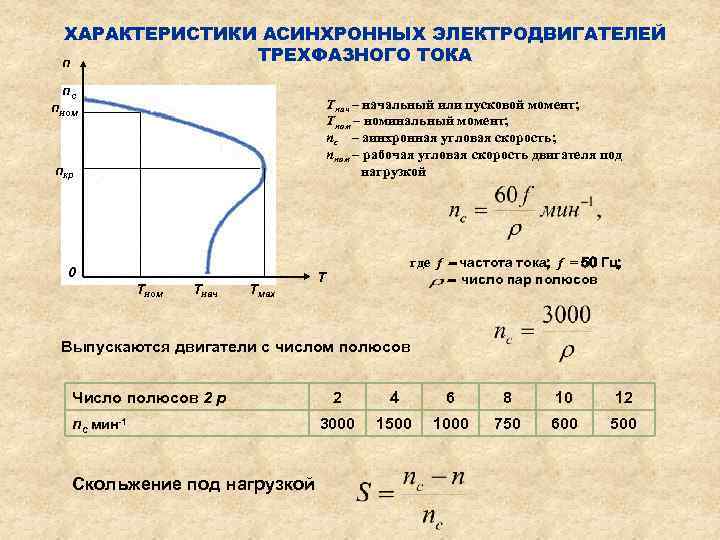 Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Что определяет скорость вращения двигателя?
- Дом
- Блог
- Что определяет скорость вращения двигателя?
Электродвигатели отличаются своим разнообразием и широким диапазоном типоразмеров. Существуют двигатели с дробной мощностью (л.с.) для небольших бытовых приборов и двигатели мощностью в тысячи л.с. для тяжелого промышленного использования. Другие характеристики, указанные на паспортных табличках двигателей, включают их входное напряжение, номинальный ток, энергоэффективность и скорость в об/мин.
Скорость вращения электродвигателя зависит от двух факторов: его физической конструкции и частоты (Гц) питающего напряжения. Инженеры-электрики выбирают скорость двигателя в зависимости от потребностей каждого приложения, подобно тому, как механическая нагрузка определяет требуемую мощность.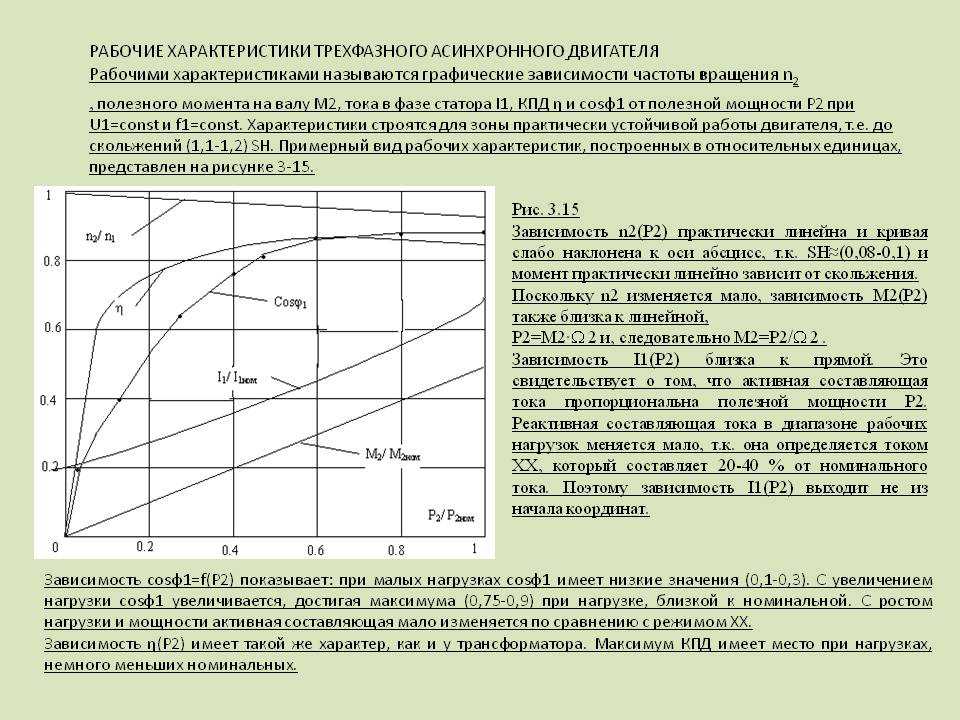
Убедитесь, что в вашем здании есть подходящий электродвигатель для каждого применения.
Как частота напряжения связана со скоростью двигателя
В зависимости от страны источник питания будет иметь частоту 60 Гц или 50 Гц. Хотя трехфазный двигатель будет вращаться с обоими источниками питания, могут возникнуть проблемы с производительностью, если двигатель указан для одной частоты, а используется для другой.
Поскольку источник питания с частотой 60 Гц переключает полярность на 20 % быстрее, чем источник питания с частотой 50 Гц, двигатель, рассчитанный на 50 Гц, будет вращаться с частотой вращения на 20 % выше. Крутящий момент двигателя остается относительно постоянным, а более высокая скорость приводит к более высокой мощности на валу. Двигатель также выделяет больше тепла, но охлаждающий вентилятор также ускоряется вместе с валом, помогая отводить лишнее тепло. Двигатель также имеет тенденцию потреблять больше реактивного тока, что снижает его коэффициент мощности.
Подключение двигателя 60 Гц к источнику питания 50 Гц — более деликатный вопрос. Снижение скорости при том же напряжении может привести к насыщению магнитопровода двигателя, увеличению тока и перегреву устройства. Самый простой способ предотвратить насыщение — снизить входное напряжение, и в идеале отношение В/Гц должно оставаться постоянным:
.
- Двигатель с частотой 60 Гц, работающий на частоте 50 Гц, работает на частоте 83,3 % от номинальной.
- Чтобы сохранить постоянное отношение В/Гц, входное напряжение также должно быть снижено до 83,3%.
- Если электродвигатель нормально работает при 240 В и 60 Гц, входное напряжение при 50 Гц должно быть 200 В, чтобы сохранить соотношение 4 В/Гц.
Электропроводка двигателя и количество полюсов
Постоянный магнит имеет два полюса, но двигатели могут быть подключены таким образом, чтобы их магнитное поле имело большее количество полюсов. Двухполюсный двигатель совершает полный оборот с одной сменой полярности, в то время как четырехполюсный двигатель поворачивается только на 180° с одним переключателем полярности. Чем больше полюсов, тем ниже скорость двигателя: если все остальные факторы равны, 4-полюсный двигатель будет вращаться с половиной скорости 2-полюсного двигателя.
Чем больше полюсов, тем ниже скорость двигателя: если все остальные факторы равны, 4-полюсный двигатель будет вращаться с половиной скорости 2-полюсного двигателя.
- Источник питания частотой 60 Гц меняет полярность 60 раз в секунду, а двухполюсный двигатель будет вращаться со скоростью 3600 об/мин при подключении к этому источнику. Четырехполюсный двигатель будет вращаться только со скоростью 1800 об/мин.
- Для двигателей 50 Гц скорость составляет 3000 об/мин с 2 полюсами и 1500 об/мин с 4 полюсами.
Концепцию можно обобщить следующим уравнением:
Используя это уравнение, 4-полюсный двигатель с частотой 60 Гц имеет скорость 1800 об/мин, а 6-полюсный двигатель с частотой 50 Гц имеет скорость 1000 об/мин. Однако на самом деле это скорость магнитного поля, называемая синхронной скоростью, которая не всегда равна скорости вращения вала.
- В синхронном двигателе , ротор использует постоянный магнит или электромагнит для вращения с расчетной скоростью.

- С другой стороны, асинхронный двигатель будет работать немного ниже расчетной скорости вращения. Так работает электромагнитная индукция, и это не следует рассматривать как неисправность.
Если электродвигатель имеет паспортную скорость 1800 об/мин, можно сделать вывод, что агрегат представляет собой 4-х полюсный синхронный двигатель, рассчитанный на 60 Гц. С другой стороны, если скорость, указанная на паспортной табличке, меньше, например 1760 об/мин, агрегат является асинхронным двигателем.
Преобразователь частоты может управлять скоростью двигателя, регулируя входную частоту, как следует из его названия. ЧРП также может модулировать напряжение, чтобы поддерживать соотношение В/Гц ниже точки насыщения магнитного сердечника. Благодаря этой функции частотно-регулируемый привод не повреждает двигатель, даже если скорость снижается ниже значения, указанного на паспортной табличке. Основным недостатком частотно-регулируемых приводов является возникновение гармонических искажений, поскольку они являются нелинейными нагрузками, но это можно компенсировать с помощью фильтров гармоник.
Электрическая конструкция делает ваше здание более безопасным и снижает расходы на электроэнергию. Компания NY Engineers реализовала более 1000 проектов, и вы можете отправить электронное письмо по адресу info@ny-engineers.com или позвонить по телефону 646-877-0767212-575-5300.
Метки
Электротехника
Выбор двигателя
Электродвигатель
ЧРП
Присоединяйтесь к более чем 15 000 коллегам-архитекторам и подрядчикам
Получайте советы экспертов по инженерным вопросам прямо на свой почтовый ящик. Подпишитесь на блог инженеров Нью-Йорка ниже.
© 2022 Nearby Engineers New York Engineers. Все права защищены. Правовая информация | Товарные знаки
Электрические асинхронные двигатели — синхронная скорость
Синхронная скорость асинхронного электродвигателя определяется
- источник питания частота и
- количество полюсов в обмотке двигателя.

Синхронная скорость может быть рассчитана как:
n = F (2 / P) 60 (1)
, где
N = Скорость поворота шарика (revent revint. об/мин)
f = частота электропитания (Гц, циклов/сек, 1/сек)
p = количество полюсов
Примечание — асинхронный двигатель никогда не достигнет своей синхронной скорости. Если бы это было так, то ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между полем статора и ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничивается скоростью ниже синхронной скорости, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример — Синхронная скорость электродвигателя с двумя полюсами
На двигатель с двумя полюсами подается питание с частотой 50 Гц (1/с) . Скорость вращения можно рассчитать как
Скорость вращения можно рассчитать как
n = (50 1/с) (2 / 2) (60 с/мин)
= 3000 об/мин (1/мин)
скорость вращения при разных частотах и числе полюсов
| Скорость вращения вала — n — (rev/min, rpm) | ||||||
|---|---|---|---|---|---|---|
| Frequency — f — (Hz) | Number of poles — p — | |||||
| 2 | 4 | 6 | 8 | 10 | 12 | |
| 10 | 600 | 300 | 200 | 150 | 120 | 100 |
| 20 | 1200 | 600 | 400 | 300 | 240 | 200 |
| 30 | 1800 | 900 | 600 | 450 | 360 | 300 |
| 40 | 2400 | 1200 | 800 | 600 | 480 | 400 |
| 50 1) | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 60 2) | 3600 | 1800 | 1200 | 900 | 720 | 600 |
| 70 | 4200 | 2100 | 1400 | 1050 | 840 | 700 |
| 80 | 4800 | 2400 | 1600 | 1200 | 960 | 800 |
| 0202 2700 | 1800 | 1350 | 1080 | 900 | ||
| 100 | 6000 | 3000 | 2000 | 1500 | 1200 | 1000 |
- Motors designed for 50 Hz наиболее распространены за пределами США
- Двигатели, рассчитанные на 60 Гц, наиболее распространены в США.