Motor Driver Speed Control with an Arduino
В этом примере мы будем управлять скоростью линейного привода с помощью Arduino и драйвера двигателя.
Примечание. Это руководство предполагает наличие предварительных знаний об основных электронных принципах, аппаратном и программном обеспечении Arduino. Если вы впервые используете Arduino, мы предлагаем изучить основы одного из многих замечательных руководств для начинающих, доступных через поиск в Google и на YouTube. Имейте в виду, что у нас нет ресурсов для оказания технической поддержки для пользовательских приложений, и мы не будем отлаживать, редактировать, предоставлять код или схемы соединений за пределами этих общедоступных руководств.
Компоненты
- Линейный привод 12 В
- Блок питания 12 В
- Ардуино
- Драйвер двигателя
- Потенциометр (опция)
- Электрические провода для подключения и обжимного инструмента или паяльника
Проводка
Обзор оборудования и программного обеспечения
Двигатели постоянного тока в линейных приводах требуют высокого тока (до 5 А), если бы мы подключили линейный привод непосредственно к Arduino, такое высокое потребление тока разрушило бы цифровые выводы Arduino, поскольку они рассчитаны только на 40 мА каждый. Поэтому мы используем драйвер двигателя, который может принимать слаботочный ШИМ-сигнал (широтно-импульсная модуляция) с платы Arduino и выводить сильноточный ШИМ-сигнал на линейный привод.
Поэтому мы используем драйвер двигателя, который может принимать слаботочный ШИМ-сигнал (широтно-импульсная модуляция) с платы Arduino и выводить сильноточный ШИМ-сигнал на линейный привод.
Драйвер двигателя подключен к двум цифровым выводам ШИМ (выводы 10 и 11 на Arduino Uno). Установив один из этих выводов в НИЗКИЙ, а другой в ВЫСОКИЙ (см. Строки 18 и 19 в коде ниже), мы можем выдвинуть привод на максимальной скорости. Чтобы остановить привод, мы устанавливаем оба контакта в положение LOW (см. Строки 21 и 22 в коде ниже), а чтобы изменить направление движения, мы можем изменить порядок контактов HIGH и LOW (см. Строки 24 и 25 в коде ниже). Мы также можем регулировать скорость, изменяя переменную «Speed» на любое значение в диапазоне [0, 255]; см. строку 17 в коде ниже.
Код
https://gist.github.com/Will-Firgelli/c0ef0871dc1946d75257e0c29dccae2a
Регулировка скорости с помощью потенциометра
В приведенном выше примере мы вручную установили скорость в строке 17 кода. Однако могут возникнуть ситуации, когда мы хотим изменять скорость привода во времени. Самый простой способ добиться этого — использовать потенциометр. А потенциометртрехконтактный переменный резистор, который может действовать как делитель напряжения. Вращая ручку потенциометра, выходное напряжение будет изменяться, и мы можем подключить его к аналоговому выводу на Arduino, чтобы установить переменную скорость.
Однако могут возникнуть ситуации, когда мы хотим изменять скорость привода во времени. Самый простой способ добиться этого — использовать потенциометр. А потенциометртрехконтактный переменный резистор, который может действовать как делитель напряжения. Вращая ручку потенциометра, выходное напряжение будет изменяться, и мы можем подключить его к аналоговому выводу на Arduino, чтобы установить переменную скорость.
Проводка
Обзор оборудования и программного обеспечения
Как упоминалось выше, потенциометр — это поворотное устройство, которое изменяет сопротивление при повороте ручки. При подключении двух внешних выводов потенциометра к 5V и GND, а средний вывод к аналоговому выводу Arduino, A0, создается делитель напряжения. При вращении ручки Arduino будет считывать аналоговые показания в диапазоне от [0, 1023].
Для значений в диапазоне [512, 1023] мы хотим, чтобы привод выдвигался, а для значений [0, 511] мы хотим, чтобы привод втягивался, этого можно достичь с помощью простого оператора if () / else в строках 22 и 28 в код ниже.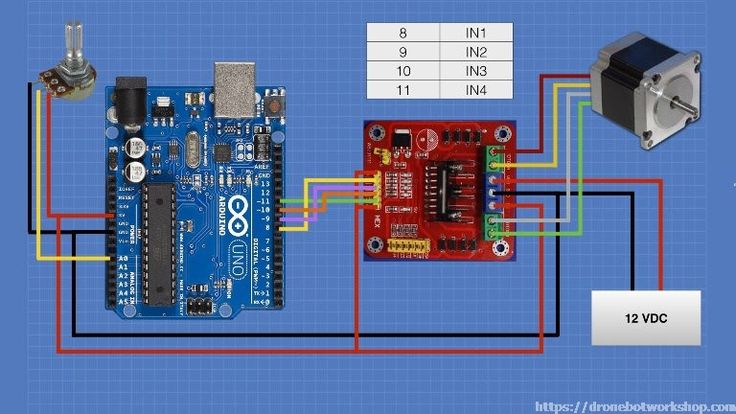 Затем, используя функцию map () (строки 23 и 29 в приведенном ниже коде), мы можем преобразовать это в сигнал ШИМ, который будет управлять скоростью и направлением привода.
Затем, используя функцию map () (строки 23 и 29 в приведенном ниже коде), мы можем преобразовать это в сигнал ШИМ, который будет управлять скоростью и направлением привода.
Код
https://gist.github.com/Will-Firgelli/d2cdf69edc829974885984b3fb8e4856
L298N подключение к Ардуино — RadioRadar
L298N подключение к Ардуино — RadioRadarНет так давно мы рассматривали алгоритм сборки ЧПУ своими руками, где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке.
Конечно, шаговые двигатели (ШД) используются не только в ЧПУ и 3D-принтерах, им есть масса и других применений. Например, вкупе с популярным «конструктором для взрослых», Arduino, на базе которого можно создать всё что угодно. Однако, связка «Ардуино – шаговый двигатель» требует дополнительный элемент – драйвер.
Из-за того, что двигатель требует повышенного напряжения и силы тока, непосредственное подключение его к микроконтроллеру невозможно, напряжения логического нуля в +5В и силы тока в 40 мА не хватит для работы любого шагового двигателя.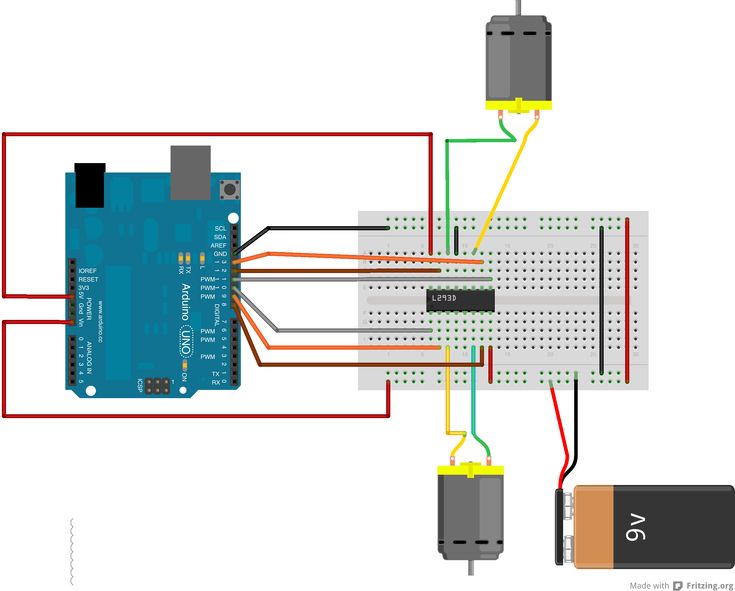 Функцию усилителя/переключателя берет на себя драйвер.
Функцию усилителя/переключателя берет на себя драйвер.
О нём мы и поговорим подробнее ниже.
L298N описание
Модуль L298N выполняет роль Н-моста (напряжение, прикладываемое к двигателю постоянного тока, может менять полярность для того, чтобы изменить направление вращения в противоположную сторону) и универсального драйвера для независимого управления сразу двумя двигателями постоянного тока или для одного шагового двигателя.
Модуль собирается на основе одноименной микросхемы (L298N).
К L298N можно подключить двигатели, питающиеся напряжением от 5 до 35 вольт. Управление может быть реализовано в активном или пассивном режимах.
1.Активный – доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
2.Пассивный – контроллер будет понимать только логику «включить/выключить двигатель». Управление уровнем выходного напряжения будет недоступно.
L298N – это облегчённая версия платы L293D. По сравнению с последней на L298N отсутствуют защитные диоды (их можно установить самостоятельно при необходимости защиты от скачков тока в процессе пуска двигателей).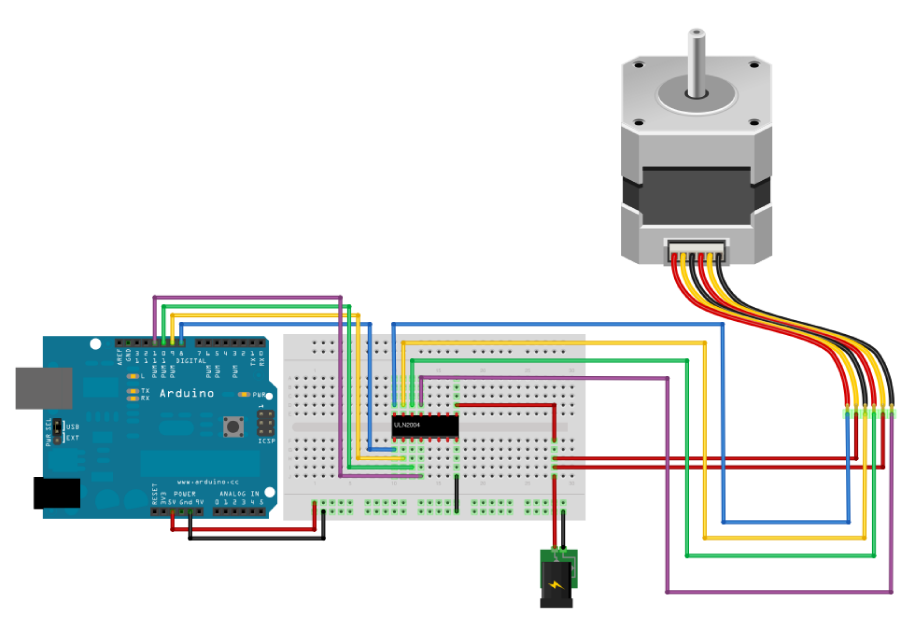
Подключение
Чтобы логика управления была понятнее, сначала разберёмся с джамперами и клеммами на плате.
Рис. 1. Джамперы и клеммы на плате
К клеммникам 1 и 2 подключаются двигатели, логика подключения зависит от моделей двигателей и логики их работы.
Блок клемм 3 отвечает за подключение питания двигателей. Первый контакт — +12. На него подаётся питание от 5 до 12 вольт, если джампер 3 одет, и от 12 до 35 воль, если джампер 3 снят.
При питании до +12В встроенный стабилизатор сам генерирует питание для логической части схемы, поэтому контакт +5В можно не использовать.
Если джампер 3 снят, то контакт +5В требуется запитать отдельно.
Управляющие сигналы от Ардуино или с другого микроконтроллера должны подаваться на контакты IN1-IN4, ENA, ENB. В зависимости от логических уровней и конфигурации джамперов 1,2 будет подаваться питание на двигатели/двигатель.
Джамперы 1 и 2 отвечают за переключение между активным и пассивным режимами работы драйвера. Если джампер одет, то реализуется логика «пассивного» управления.
Если джампер одет, то реализуется логика «пассивного» управления.
Теперь для наглядности рассмотрим пару реальных схем подключения.
Управление двумя двигателями постоянного тока
Схема соединения будет выглядеть следующим образом.
Рис. 2. Схема соединения
Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Стоит особое внимание уделить пинам на Ардуино с ШИМ-модуляцией (рядом с цифровым значением есть специальный символ «~»). Они необходимы для управления скоростью вращения вала (чем выше уровень напряжения, тем выше скорость).
Теперь о логике, на примере левого двигателя (см. изображение выше).
Таблица
Логический уровень на контакте ENA | Логический уровень на контакте IN1 | Логический уровень на контакте IN2 | Результат работы двигателя |
1 | 1 | 0 | Вращается по часовой стрелке |
1 | 0 | 1 | Вращается против часовой |
0 | 1 | 0 | Не вращается |
0 | 0 | 1 | Не вращается |
Логический уровень на контакте ENAЛогический уровень на контакте IN1Логический уровень на контакте IN2Результат работы двигателя
Получается, что контакт ENA отвечает за разрешение работы двигателя. А от комбинации на входах IN1, IN2 зависит направление вращения.
А от комбинации на входах IN1, IN2 зависит направление вращения.
Если на контакт ENA подать не логическую единицу, а заданный уровень напряжения из доступного диапазона (0-255), то изменится скорость вращения.
Управление шаговым двигателем
Соединение схемы управления, включающей в себя драйвер, двигатель Nema17 и Arduino Nano, выглядит следующим образом.
Рис. 3. Соединение схемы управления,
Назначение контактов A+, A-, B+ и B- может отличаться на вашей модели привода, поэтому необходимо изучить документацию для определения правильного назначения.
Ввиду того, что логика работы данной схемы предполагает наличие на выходах только логических нулей и единиц, то джамперами 1 и 2 модуль L298N переключается в пассивный режим.
Скетч для работы с шаговым двигателем есть во встроенной библиотеке IDE для Ардуино (называется Stepper Library, найти её можно так — File -> Examples -> Stepper).
Константа stepsPerRevolution отвечает за количество шагов в одном обороте, по умолчанию установлено значение 200. Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Метод myStepper.setSpeed() отвечает за настройку скорости вращения, по умолчанию в скетче указан показатель 60, его можно изменить под свои требования.
Вызов функции, инициализирующей вращение, осуществляется через метод step с параметром stepsPerRevolution, при отрицательном параметре вращение осуществляется в обратную сторону.
Пример с использованием этой библиотеки можно найти ниже во вложениях. Полную документацию по API можно найти на официальном сайте проекта.
Скетчи двигателей постоянного тока и шаговых двигателей можно найти здесь.
Автор: RadioRadar
Основы электроники Arduino: управление двигателем
Основы электроники Arduino: управление двигателем Эта статья была переведена на английский язык и первоначально опубликована для deviceplus.jp.
В Device Plus было представлено множество приложений для Arduino и примеры деталей, но знание основ особенно важно, когда вы что-то создаете. Вот почему в сегодняшней статье мы рассмотрим ключевые основы Arduino. Обучать нас этому сегодня будет эксперт и автор книги «Введение в основы Arduino Electronic Crafts!» Казухиро Фукуда.
Обучать нас этому сегодня будет эксперт и автор книги «Введение в основы Arduino Electronic Crafts!» Казухиро Фукуда.
В этой статье я хотел бы рассказать о том, как можно управлять двигателями с большими электрическими токами.
Двигатели используются для запуска самых разных машин, таких как дроны и автомобили. Подключение двигателей к источнику питания позволяет электронным компонентам генерировать вращательное движение. Присоединение шин или пропеллеров к двигателю также увеличивает вращение и движение операций.
На Arduino можно управлять мотором. Как и в случае со светодиодом, вы можете управлять вращением или остановкой двигателя, включая и выключая питание, подаваемое на двигатель. В сочетании с другими датчиками можно настроить автоматическое управление, например, останов двигателя при приближении препятствия.
Двигатель вращается в противоположном направлении при изменении направления подключенного источника питания. Также возможно изменить скорость вращения, регулируя количество протекающего тока. В результате это дает возможность вращаться с высокой скоростью, когда двигатель движется, или медленно останавливаться в желаемом положении путем постепенного замедления при остановке. Даже если снаряд попадет в вентиляторы, двигатель может двигаться назад и двигаться в других направлениях. При этом сегодня мы рассмотрим способы управления двигателем на Arduino.
В результате это дает возможность вращаться с высокой скоростью, когда двигатель движется, или медленно останавливаться в желаемом положении путем постепенного замедления при остановке. Даже если снаряд попадет в вентиляторы, двигатель может двигаться назад и двигаться в других направлениях. При этом сегодня мы рассмотрим способы управления двигателем на Arduino.
[Содержание]
・ Работая двигатель требует водителя
・ Соединение двигателя с Arduino
・ Результат мотор на программе
・ Скоро двигатель
Для работы двигателя требуется драйвер
Для работы двигателя требуется драйвер На цифровом выходе Arduino вы можете переключаться между высоким и низким уровнем для управления световыми вспышками светодиода. Используя эту функцию, вы сможете подавать электроэнергию на двигатель. Однако, даже если вы на самом деле подключите двигатель напрямую к Arduino, он не будет работать.
Для того, чтобы двигатель двигался, требуется большое количество электрического тока.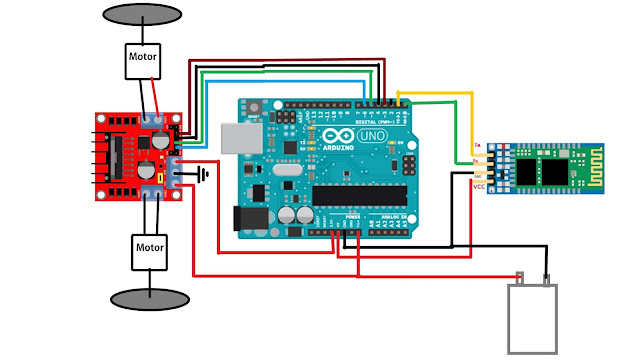 Например, для сегодняшнего [RE-280RA] вам потребуется более 1 А электрического тока, чтобы он двигался. Однако цифровой выходной разъем Arduino может протекать только до 20 мА. Протекание любого электрического тока через это потенциально может повредить Arduino. Для этого нам нужно подключить мотор к выходному разъему Arduino и управлять им.
Например, для сегодняшнего [RE-280RA] вам потребуется более 1 А электрического тока, чтобы он двигался. Однако цифровой выходной разъем Arduino может протекать только до 20 мА. Протекание любого электрического тока через это потенциально может повредить Arduino. Для этого нам нужно подключить мотор к выходному разъему Arduino и управлять им.
Здесь будет использоваться「Драйвер двигателя」. Драйвер двигателя — это электрический компонент, используемый для управления двигателем. Подготовьте цепь, которая соединяет двигатель с источником питания для работы двигателя, и вставьте драйвер двигателя внутрь. Драйвер двигателя может подключать и отключать цепь управления двигателем с помощью внешнего сигнала, а также управлять вращением и остановкой двигателя. Так как в управляющий сигнал почти не поступает ток, то даже при подключении Arduino управлять мотором можно будет без проблем.
В зависимости от привода двигателя направление вращения может переключаться управляющим сигналом. Оснащенный двумя разъемами управления, когда для одной стороны установлено значение «Высокий», он будет вращаться нормально, а для другой стороны, для которого установлено значение «Высокий», будет вращаться в обратном направлении. Это позволяет осуществлять управление вперед, назад и остановку.
Оснащенный двумя разъемами управления, когда для одной стороны установлено значение «Высокий», он будет вращаться нормально, а для другой стороны, для которого установлено значение «Высокий», будет вращаться в обратном направлении. Это позволяет осуществлять управление вперед, назад и остановку.
Подключение мотора к Arduino
Подключение мотора к Arduino Теперь попробуем управлять мотором с Arduino. Для этой части будет использоваться следующая электроника, поэтому, пожалуйста, убедитесь, что вы подготовили ее.
Двигатель постоянного тока
Это корпус двигателя. Эти типы двигателей, в которых используются сухие батареи, называются «двигателями постоянного тока». В этой статье мы будем использовать「RE-280RA」. Аккумулятор RE-280RA может поддерживать электрическое напряжение до 4,5 В.
Драйвер двигателя
Мы будем использовать это для управления двигателем. Следуя сигналам от Arduino, можно управлять подачей электроэнергии на двигатель и направлением вращения.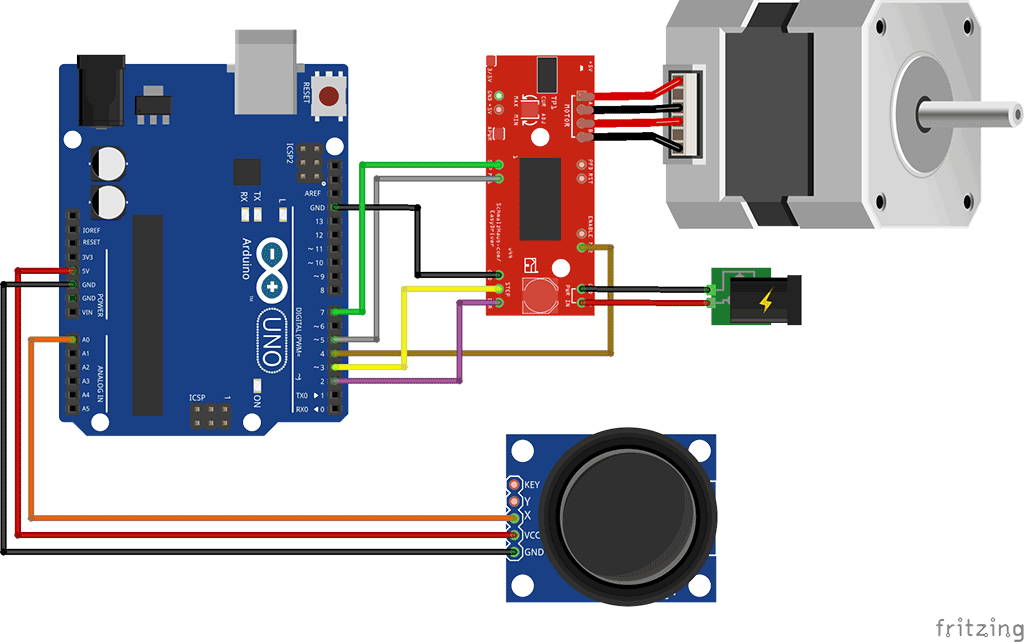 Мы будем использовать「BA6956AN」из ROHM. От разъема с вырезами (слева на картинке) они считаются как разъем 1 и разъем 2.
Мы будем использовать「BA6956AN」из ROHM. От разъема с вырезами (слева на картинке) они считаются как разъем 1 и разъем 2.
Конденсатор 0,1 мкФ
Конденсатор — это электрический компонент, который может накапливать небольшое количество электроэнергии. Когда он работает на моторе, он начинает шуметь. Этот шум может оказывать негативное воздействие на другие работающие электрические детали. Поэтому подключите конденсатор к обоим разъемам, чтобы уменьшить шум.
Резистор 10 кОм (1/4 Вт)
Чтобы предотвратить поломку электронных компонентов из-за внезапного протекания большого электрического тока, ток можно подавить с помощью резистора. На этот раз, чтобы указать напряжение, подаваемое на двигатель, разъем Arduino 3.3V подключен к драйверу двигателя. Обычно ток почти не течет, но в некоторых случаях может течь большой ток, поэтому подключите резистор 10 кОм, чтобы предотвратить протекание больших токов. На резисторе 10 кОм напечатано «Коричневый Черный Оранжевый Золотой» вместе с цветовым кодом.
Батарея
Защелка батареи
Батареи используются в качестве источника питания для вращения двигателя. Здесь будет использоваться 006P, который может подавать напряжение до 9 В. Он также использует батарейные защелки для подключения батарей к макетной плате.
Электрические зажимы Линии перемычек
Для двигателя необходима проводка для разъемов до макетной платы. Обычно проводник припаивается к разъему. Однако, если вы используете перемычку с электрическим зажимом, вы можете просто подключить его, вставив зажим в разъем двигателя, что устраняет необходимость пайки.
Подготовив каждый из компонентов, соедините их, как показано ниже.
Подсоедините двигатель к разъемам 2 и 4 привода двигателя, зажав разъем электрическим зажимом. Имейте в виду, что во время работы двигателя может возникать шум, который может повлиять на другие устройства. Таким образом, подключение конденсаторов к обоим разъемам двигателя уменьшит уровень шума.
Таким образом, подключение конденсаторов к обоим разъемам двигателя уменьшит уровень шума.
Двигатель может питаться от отдельно подготовленного аккумулятора. Следовательно, питание можно подавать от аккумулятора, подключив аккумулятор к пятому и третьему разъемам драйвера двигателя.
Кроме того, двигатель, использованный на этот раз, имеет диапазон питания до 4,5 В. По этой причине напряжение может быть слишком высоким с батареей 9 В, поэтому существует вероятность повреждения двигателя. Поэтому укажите максимальное выходное напряжение, подаваемое на двигатель, на разъеме 1 драйвера двигателя. На этот раз мы сможем подать на двигатель до 3,3 В. Подключите блок питания Arduino 3,3 В к разъему 1 и укажите максимальное напряжение. Вращением двигателя можно управлять с помощью седьмого и девятого разъемов драйвера двигателя. Это означает, что подключение к разъемам 5 и 6 Arduino позволяет вам управлять двигателем через выход Arduino.
Управление двигателем по программе
Управление двигателем по программе После подключения попробуем управлять двигателем с помощью кода программирования. Вращением двигателя можно управлять с помощью выходных сигналов разъемов 5 и 6 Arduino. Вращением, остановкой и направлением вращения можно управлять, изменяя высокий или низкий уровень на этих двух разъемах. В случае с BA6956AN им можно управлять следующим образом.
Вращением двигателя можно управлять с помощью выходных сигналов разъемов 5 и 6 Arduino. Вращением, остановкой и направлением вращения можно управлять, изменяя высокий или низкий уровень на этих двух разъемах. В случае с BA6956AN им можно управлять следующим образом.
При нормальном вращении выход разъема 5 устанавливается на высокий уровень, а выход разъема 6 — на низкий. Запись приведенного ниже кода программирования в Arduino должна запустить нормальное вращение двигателей.
В десятой строке выход должен быть установлен на высокий уровень, а на разъеме 6 в шестой строке выход должен быть установлен на низкий уровень.
Если вы хотите, чтобы двигатель вращался в противоположном направлении, выход разъема 5 должен быть установлен на низкий уровень, а выход разъема 6 — на высокий уровень.
Программный код должен выглядеть следующим образом:
В десятой строке выход разъема 5 должен быть установлен на низкий уровень, а в одиннадцатой строке разъем 6 должен быть установлен на высокий уровень. Если вы хотите остановить двигатель, оба выхода для разъемов 5 и 6 должны быть установлены на низкий уровень.
Если вы хотите остановить двигатель, оба выхода для разъемов 5 и 6 должны быть установлены на низкий уровень.
Программный код должен выглядеть следующим образом:
Кроме того, установка обоих выходов на высокий уровень приведет к включению выключателя. Установка любого из них на низкий уровень приведет к его остановке через короткий промежуток времени.
Изменение скорости вращения двигателя
Изменение скорости вращения двигателя В прошлый раз мы смогли изменить яркость с помощью метода вывода светодиодов, называемого ШИМ. Даже на двигателе скорость вращения можно изменить, управляя двигателем с помощью ШИМ. Переключаясь между высоким и низким за короткий промежуток времени, двигатель попеременно переключается между вращением и остановкой, при этом скорость вращения фактически ниже, чем обычно. Чем дольше High time, тем быстрее будет скорость вращения, и наоборот.
Для двигателя выведите разъем управления в том направлении, в котором вы хотите вращать ШИМ, и всегда держите другой разъем на низком уровне. Для нормального вращения выведите разъем 5 на ШИМ и оставьте разъем 6 на низком уровне. Для обратного вращения выведите разъем 6 на ШИМ и оставьте разъем 5 на низком уровне. Программный код для управления скоростью нормального вращения приведен ниже.
Для нормального вращения выведите разъем 5 на ШИМ и оставьте разъем 6 на низком уровне. Для обратного вращения выведите разъем 6 на ШИМ и оставьте разъем 5 на низком уровне. Программный код для управления скоростью нормального вращения приведен ниже.
Для кода программирования установите выходной разъем 5 в строке 10 на половину коэффициента ШИМ (максимальное значение 255) и оставьте разъем 6 в строке 11 на низком уровне. Если вы измените число в строке 10, скорость также изменится. Однако двигатель не будет вращаться, если High меньше определенного процента. Если двигатель не вращается при малом значении, попробуйте указать большее значение. Вы можете постепенно изменять скорость, постепенно увеличивая или уменьшая значение, выводимое из разъема 5. В следующей программе скорость вращения будет постепенно увеличиваться из состояния остановки, и как только она достигнет максимума, скорость будет постепенно уменьшаться и останавливаться.
Сегодня мы рассмотрели различные способы управления электронными компонентами Arduino, такими как светодиоды или двигатели. В следующий раз мы поговорим о том, как посмотреть состояние переключателей на Arduino.
В следующий раз мы поговорим о том, как посмотреть состояние переключателей на Arduino.
Ознакомьтесь с нами в социальных сетях
Ознакомьтесь с нами в социальных сетях Управление двигателем постоянного тока с помощью ШИМ-сигналов — Arduino — Robo India || Учебники || Изучите Ардуино |
Управление двигателем постоянного тока с помощью ШИМ-сигналов — Arduino — Robo India || Учебники || Изучите Ардуино |
В этом руководстве Robo India объясняется, как управлять скоростью двигателя постоянного тока с помощью сигналов ШИМ.
1. Введение
Скорость двигателя постоянного тока в целом прямо пропорциональна напряжению питания, поэтому, если уменьшить напряжение с 9 вольт до 4,5 вольт, наша скорость станет вдвое меньше первоначальной. Но на практике для изменения скорости двигателя постоянного тока мы не можем все время изменять напряжение питания. ШИМ-регулятор скорости для двигателя постоянного тока работает путем изменения среднего напряжения, подаваемого на двигатель.
ШИМ-сигнал представляет собой прямоугольную волну высокой частоты (обычно более 1 кГц). Рабочий цикл этой прямоугольной волны варьируется для изменения мощности, подаваемой на нагрузку.
Рабочий цикл этой прямоугольной волны варьируется для изменения мощности, подаваемой на нагрузку.
Входные сигналы, подаваемые на ШИМ-контроллер, могут быть аналоговыми или цифровыми в зависимости от конструкции ШИМ-контроллера. ШИМ-контроллер принимает управляющий сигнал и регулирует рабочий цикл ШИМ-сигнала в соответствии с требованиями. На приведенной ниже диаграмме показаны формы сигналов, полученные на выходе при различных требованиях к напряжению.
В этих волнах частота одинакова, но время включения и выключения разное.
1.2 Необходимое оборудование
1.3 Распиновка микросхемы драйвера двигателя L293D
Драйвер двигателя представляет собой модуль для двигателей, который позволяет одновременно управлять рабочей скоростью и направлением двух двигателей. Этот драйвер двигателя разработан и разработан на основе микросхемы L293D.
L293D представляет собой 16-контактную микросхему с восемью выводами на каждой стороне для одновременного управления двумя двигателями постоянного тока. Для каждого двигателя имеется 4 контакта INPUT, 4 контакта OUTPUT и 2 контакта ENABLE.
Для каждого двигателя имеется 4 контакта INPUT, 4 контакта OUTPUT и 2 контакта ENABLE.
Контакт 1: Когда Enable1/2 имеет ВЫСОКИЙ уровень, левая часть микросхемы будет работать, т. е. двигатель, подключенный к контактам 3 и 6, будет вращаться.
Контакт 2: Вход 1, когда на этом контакте ВЫСОКИЙ уровень, ток будет течь через выход 1.
Контакт 3: Выход 1, этот контакт подключен к одной клемме двигателя.
Контакт 4/5: контакты заземления
Контакт 6: выход 2, этот контакт соединен с одной клеммой двигателя.
Контакт 7: Вход 2, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 2.
Контакт 8: VSS, этот контакт используется для подачи питания на подключенные двигатели от 5 В до 36 В максимум, в зависимости от подключенного двигателя.
Контакт 9: Когда Enable 3/4 имеет ВЫСОКОЕ значение, правая часть микросхемы будет работать, т. е. двигатель, подключенный к контактам 11 и 14, будет вращаться.
Контакт 10: Вход 4, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 4.
Контакт 11: Выход 4, этот контакт подключен к одной клемме двигателя.
Контакт 12/13: контакты заземления
Контакт 14: выход 3, этот контакт соединен с одной клеммой двигателя.
Контакт 15: Вход 3, когда на этом контакте ВЫСОКИЙ уровень, ток будет течь через выход 3.
Контакт 16: VCC, для подачи питания на микросхему, т. е. 5 В.
2. Соединения с Arduino
1. Модуль 5В (VCC) – Arduino 5В.
2. Заземление модуля — Заземление Arduino.
3. Модуль 1 – Arduino D8.
4. Модуль 2 – Arduino D9.
5. Модуль 3 – Arduino D10.
6. Модуль 4 – Arduino D11.
7. Модуль EN12 – Arduino D5.
8. Модуль EN34 – Arduino D6.
9. Модуль двигателя Винтовые клеммы – двигатели постоянного тока.
10. Модуль питания VSS Винтовой зажим- Внешний источник питания 9В.
Убедитесь, что убрана предустановка Jumper на контактах Enable модуля, чтобы мы могли подключить вход PWM к этому контакту и управлять скоростью двигателей. Если мы подключим эти контакты к земле, то двигатель отключится.
Если мы подключим эти контакты к земле, то двигатель отключится.
3. Программирование:
Вот код для запуска этой схемы.
Вы можете скачать этот код (Arduino Sketch) отсюда.
//Учебное пособие от RoboIndia по управлению двигателем с использованием ШИМ-сигналов
//Требуемое оборудование: драйвер двигателя (от RoboIndia и Arduino)
// Двигатель А
const int inputPin1 = 10; // Контакт 15 L293D ИС
const int inputPin2 = 11; // Контакт 10 микросхемы L293D
// Двигатель Б
const int inputPin3 = 9; // Контакт 7 микросхемы L293D
const int inputPin4 = 8; // Контакт 2 микросхемы L293D
инт EN1 = 5; // Контакт 1 микросхемы L293D
инт EN2 = 6; // Контакт 9 микросхемы L293D
недействительная установка ()
{
pinMode(EN1, ВЫХОД); // куда подключен двигатель
pinMode(EN2, ВЫХОД); // куда подключен двигатель
pinMode (входPin1, ВЫХОД);
pinMode(inputPin2, ВЫХОД);
pinMode(inputPin3, ВЫХОД);
pinMode(inputPin4, OUTPUT);
Серийный номер . begin(9600);
Серийный номер .println("Введите значения от 0 до 255");
}
пустой цикл ()
{
если ( серийный номер .доступно())
{
int скорость = Серийный номер .parseInt(); //Получить значение от последовательного монитора
Серийный номер .println(скорость)
аналоговая запись (EN1, скорость); //устанавливаем скорость моторов
аналоговая запись (EN2, скорость); //устанавливаем скорость моторов
цифровая запись (входной контакт 1, ВЫСОКИЙ);
цифровая запись (inputPin2, НИЗКИЙ);
цифровая запись (входной контакт 3, ВЫСОКИЙ);
цифровая запись (inputPin4, НИЗКИЙ);
}
}
begin(9600);
Серийный номер .println("Введите значения от 0 до 255");
}
пустой цикл ()
{
если ( серийный номер .доступно())
{
int скорость = Серийный номер .parseInt(); //Получить значение от последовательного монитора
Серийный номер .println(скорость)
аналоговая запись (EN1, скорость); //устанавливаем скорость моторов
аналоговая запись (EN2, скорость); //устанавливаем скорость моторов
цифровая запись (входной контакт 1, ВЫСОКИЙ);
цифровая запись (inputPin2, НИЗКИЙ);
цифровая запись (входной контакт 3, ВЫСОКИЙ);
цифровая запись (inputPin4, НИЗКИЙ);
}
}
 begin(9600);
Серийный номер .println("Введите значения от 0 до 255");
}
пустой цикл ()
{
если ( серийный номер .доступно())
{
int скорость = Серийный номер .parseInt(); //Получить значение от последовательного монитора
Серийный номер .println(скорость)
аналоговая запись (EN1, скорость); //устанавливаем скорость моторов
аналоговая запись (EN2, скорость); //устанавливаем скорость моторов
цифровая запись (входной контакт 1, ВЫСОКИЙ);
цифровая запись (inputPin2, НИЗКИЙ);
цифровая запись (входной контакт 3, ВЫСОКИЙ);
цифровая запись (inputPin4, НИЗКИЙ);
}
}
begin(9600);
Серийный номер .println("Введите значения от 0 до 255");
}
пустой цикл ()
{
если ( серийный номер .доступно())
{
int скорость = Серийный номер .parseInt(); //Получить значение от последовательного монитора
Серийный номер .println(скорость)
аналоговая запись (EN1, скорость); //устанавливаем скорость моторов
аналоговая запись (EN2, скорость); //устанавливаем скорость моторов
цифровая запись (входной контакт 1, ВЫСОКИЙ);
цифровая запись (inputPin2, НИЗКИЙ);
цифровая запись (входной контакт 3, ВЫСОКИЙ);
цифровая запись (inputPin4, НИЗКИЙ);
}
}
4. Выход
После подключения скопируйте и вставьте этот код в Arduino IDE, а затем загрузите код. Откройте Serial Monitor и отправьте входные значения в Arduino. Вы можете управлять скоростью двигателя постоянного тока, отправляя различные значения от 0 до 255.
Если у вас есть какие-либо вопросы, напишите нам по адресу support@roboindia.