Моторы фокусировки Canon — Canon Russia
Моторы фокусировки Canon — Canon Russia
ОБЪЕКТИВЫ
Очень легко забыть о том, какие технологии отвечают за автофокусировку. Откройте для себя историю создания ультразвукового (USM) и шагового (STM) моторов Canon и узнайте, как они обеспечивают быструю, плавную и тихую автофокусировку.
Когда вы разглядываете фотографию или смотрим видео, то сразу обращаете внимание, в фокусе ли изображение или нет. Несмотря на то, что существуют исключения — фотографии, которые остаются в памяти несмотря на плохую фокусировку, — четкий фокус на объекте является основой практически любой фотографии.
На заре развития автофокусировки (первой камерой Canon с автофокусировкой стала T80, выпущенная в 1985 году) мотор автофокусировки зачастую располагался в корпусе камеры или прикреплялся к объективу, управляя им механически. В 1987 году, когда было представлено крепление EF с полностью электронными соединителями, Canon удалось разработать миниатюрный мотор автофокусировки и поместить его напрямую в объектив. Это позволило оптимизировать мотор AF в зависимости от объектива, в который он устанавливался, и обеспечивать более быструю автофокусировку.
Это позволило оптимизировать мотор AF в зависимости от объектива, в который он устанавливался, и обеспечивать более быструю автофокусировку.
Однако индустрии все еще требовался мощный мотор автофокусировки для светосильных объективов, оснащенных большой группой фокусировки, — такой мотор должен был обеспечивать не только быструю и точную, но также плавную и бесшумную автофокусировку. Итогом разработок стал объектив EF 300mm f/2.8L USM с быстрым и практически бесшумным ультразвуковым мотором (USM). В 1990 году новые технологии производства сделали возможным снижение стоимости изготовления таких моторов, и USM кольцевого типа появились в более бюджетных камерах Canon.
Два года спустя, в 1992 году, автоматизация производства помогла разработать мотор Micro USM для оснащения им недорогих объективов. В 2002 году, то есть еще через десять лет, свет увидел мотор Micro USM II, размером вдвое меньше оригинального мотора Micro USM.
В 2012 году компания представила мотор нового типа — STM, названный вследствие используемой шаговой технологии. Этот мотор был в первую очередь создан для видеокамер, поскольку он обеспечивает очень плавный и тихий перевод фокуса.
Этот мотор был в первую очередь создан для видеокамер, поскольку он обеспечивает очень плавный и тихий перевод фокуса.
В 2016 году Canon представила мотор фокусировки Nano USM, который сочетает в себе скорость ультразвукового мотора кольцевого типа (USM) с плавностью и бесшумностью шагового мотора (STM).
Это означает, что компания разработала четыре типа мотора USM — кольцевого типа, Micro, Micro II и Nano. Как и все моторы автофокусировки, они стремятся преобразовать электромагнитный импульс во вращающую силу, чтобы управлять позицией группы фокусировки в объективе. От других моторов устройства USM отличает преобразование во вращающую силу энергии ультразвуковых вибраций.
Кольцевые моторы USM имеют относительно простую конструкцию и простое расположение ротора и статора. Статор — это зубчатое кольцо в его задней части.
Моторы USM кольцевого типа созданы для размещения внутри оправы объектива.
Объектив Canon EF-S 18-135mm f/3.5-5.6 IS USM стал первой моделью с мотором Nano USM, который обеспечивает высокоскоростную автофокусировку в еще более компактном корпусе, чем у предыдущих моделей.
Взгляд на работу технологии Nano USM в объективе EF-S 18-135mm f/3.5-5.6 IS USM.
Ультразвуковой мотор кольцевого типа
Ультразвуковой мотор (USM) кольцевого типа чаще всего используется для автофокусировки в объективах EF от Canon. Для эффективной работы мотор USM кольцевого типа должен соответствовать ряду требований. Он должен быть достаточно мощным для быстрого и плавного передвижения группы фокусировки, чтобы избежать потребности в установке дополнительных механизмов-доводчиков. Он также должен обладать способностью удерживать группу линз на месте при выключении мотора, без вмешательства с вашей стороны. Его должно быть легко производить; он должен быстро начинать и завершать работу для максимально чувствительной фокусировки. Он также должен обеспечивать низкий уровень шума при работе.
Более того, моторы кольцевого типа максимально энергоэффективны и позволяют продлить время работы камеры от аккумулятора. Кольцевая форма делает их идеальным вариантом для размещения в оправе объектива. Их скоростью фокусировки можно точно управлять, а также они стабильно работают в широком диапазоне температур — от -30 °C до +60 °C.
Их скоростью фокусировки можно точно управлять, а также они стабильно работают в широком диапазоне температур — от -30 °C до +60 °C.
Мотор USM кольцевого типа очень прост в использовании. Его механизм состоит из ротора и статора — эластичного модуля с прикрепленным к нему пьезоэлектрическим керамическим элементом. При подаче переменного тока с резонансной частотой около 30 кГц на статор создаются вибрации, вызывающие непрерывное вращение ротора. 30 кГц — это ультразвуковая частота, поэтому мотор называется ультразвуковым.
Пьезоэлектрический элемент создает ультразвуковые волны, которые заставляют ротор создавать вращающую силу, перемещающую группу фокусировки, — подобно волнам океана, разгоняющим серфера. Переключение тока между двумя фазами меняет направление ультразвуковых волн. Поэтому группу фокусировки можно перемещать в разных направлениях, что позволяет управлять направлением, скоростью и углом при настройке фокусировки.
Система STM использует точный шаговый мотор, который имеет определенный шаг передвижения.
Большие объективы STM оснащены системой STM с винтовой передачей, размер которой превышает размеры блоков STM, используемых в компактных объективах, однако такая система обеспечивает более быструю и тихую работу.
Micro USM
В отличие от USM кольцевого типа, где статор и ротор — это раздельные компоненты, в конструкции Micro USM ротор, статор и привод расположены в одном блоке, который весит примерно вдвое меньше, чем мотор USM кольцевого типа. Если более мощный ультразвуковой мотор кольцевого типа создан для круглой оправы объектива, что делает его идеальным вариантом для установки в профессиональные зум-объективы, то мотор Micro USM создан для использования в широком ряде объективов без ограничения по размеру оправы объектива. Микромоторы также дешевле в производстве, что позволяет устанавливать их в недорогие объективы, где стоимость каждого компонента имеет значение.
Мотор Micro USM работает схожим с USM кольцевого типа образом, создавая ультразвуковые вибрации с помощью пьезоэлектрических элементов. Доступно четыре пьезоэлектрических слоя, каждый из которых изготавливается из двух пьезоэлектрических элементов с переменной фазой. Переменные фазы этих элементов имеют угол сдвига 90°. При подаче переменного тока только на A-фазу статор будет вибрировать влево и вправо. При подаче тока на B-фазу статор будет вращаться вперед и назад. Когда ток подается на фазы A и B, движение получается вращательным, поскольку кончик статора циклично двигается, к примеру, влево-назад-вправо-вперед. Это вращательное усилие воздействует на основной привод, который используется для перемещения механизмов группы фокусировки.
Доступно четыре пьезоэлектрических слоя, каждый из которых изготавливается из двух пьезоэлектрических элементов с переменной фазой. Переменные фазы этих элементов имеют угол сдвига 90°. При подаче переменного тока только на A-фазу статор будет вибрировать влево и вправо. При подаче тока на B-фазу статор будет вращаться вперед и назад. Когда ток подается на фазы A и B, движение получается вращательным, поскольку кончик статора циклично двигается, к примеру, влево-назад-вправо-вперед. Это вращательное усилие воздействует на основной привод, который используется для перемещения механизмов группы фокусировки.
Micro USM II
Мотор Micro USM II — это уменьшенная версия мотора Micro USM. Она работает аналогичным образом, однако длина блока была значительно уменьшена, что позволяет использовать его в сверхкомпактных зум-объективах. Меньший размер был достигнут благодаря новой конфигурации ротора и статора — вместо линейного расположения часть статора теперь находится внутри ротора. Это потребовало создания нового формата вибраций — с их помощью резонансная частота пьезоэлектрических элементов не превышала допустимых значений, что ограничивало амплитуду вибраций.
Это потребовало создания нового формата вибраций — с их помощью резонансная частота пьезоэлектрических элементов не превышала допустимых значений, что ограничивало амплитуду вибраций.
В итоге Micro USM II получился примерно вдвое компактнее и легче, чем мотор Micro USM, однако практически не уступал своему собрату по эффективности. Его компактный размер позволяет эффективно применять Micro USM II в комбинации с компактными зум-объективами. Первой моделью, оснащенной Micro USM II, стал объектив EF 28-105mm f/4-5.6 USM, который был выпущен в 2000 году.
Объектив Canon RF 24-105mm F4L IS USM оснащен мотором Nano USM, который управляется микропроцессором объектива, — он быстро обменивается данными с системой Dual Pixel CMOS AF в датчике изображения камер системы EOS R, а также с процессором камеры (процессором обработки изображений), обеспечивая сверхбыструю автофокусировку.
STM
Следующая технология мотора фокусировка была несколько иной. Объективы с мотором STM, впервые представленные в 2012 году, в первую очередь предназначены для видеосъемки, поскольку шаговый мотор STM обеспечивает плавную и тихую фокусировку.
Шаговый мотор использует постоянный ток, проходящий через несколько катушек, организованных в группы. Подача тока на группы в нужной последовательности приводит к вращению мотора на один шаг. Чем больше групп — тем более точным можно сделать движение мотора.
Когда компактность имеет приоритетное значение, Canon оснащает объектив мотором STM с шестеренной передачей. Такой мотор использует зубчатые колеса в качестве приводящего механизма и не занимает слишком много места. В объективах большого размера применяется система STM с винтовой передачей. Она больше, чем STM с шестеренной передачей, однако обеспечивает более быструю и тихую фокусировку.
Nano USM
Новейшая разработка Nano USM была впервые представлена в новой версии объектива EF-S 18-135mm f/3.5-5.6 IS USM в 2016 году. Нашей целью было изготовить мотор, который обеспечивает необходимую фотографам скорость и требуемую для производства видео плавность автофокусировки.
Как и более ранние моторы USM, технология Nano USM использует ультразвуковые вибрации для создания движения, однако мотор имеет сверхкомпактный корпус и вместе с тем обеспечивает высокую эффективность автофокусировки.
Как и другие моторы USM, Nano USM состоит из эластичного металлического корпуса, керамического элемента и привода. Подача тока и изменение напряжения на керамические элементы создает два типа вибраций, которые позволяют мотору точно управлять скоростью и направлением движения привода. Однако движение является линейным, а не вращательным — группа фокусировки оснащена приводом с направляющими пластинами, которые отвечают за движение вперед и назад. В итоге пользователь получает плавную и практически бесшумную фокусировку с точным контролем над скоростью.
Объектив RF 70-200mm F2.8L IS USM, который был выпущен в октябре 2019 года, стал первой моделью с технологией Dual Nano USM. Он оснащен двумя моторами Nano USM, каждый из которых приводит в движение свою группу линз, — вместе они обеспечивают еще более быструю и эффективную фокусировку.
Автор Angela Nicholson
ОБЪЕКТИВЫ
Флюоритовые, асферические, UD и BR-линзы
Узнайте о передовых технологиях производства линз Canon, таких как флюоритовые, асферические, BR- и UD-элементы, позволяющих избавиться от аберраций и достичь высочайшего качества изображения.

Узнайте больше
ОБЪЕКТИВЫ
Многослойный дифракционный оптический элемент
Многослойный дифракционный оптический элемент — это технология, сочетающая в себе характеристики асферических и флюоритовых элементов. Узнайте больше.
Узнайте больше
ОБЪЕКТИВЫ
Стабилизация изображения
Узнайте, как технология стабилизации изображения в объективах Canon обеспечивает четкость фотографий, несмотря на сотрясения камеры, какой режим стабилизации изображения использовать для получения наилучших результатов и многое другое.
Узнайте больше
СТАТЬЯ
12 ответов на часто задаваемые вопросы о системе Canon EOS R
Подойдет ли вам полнокадровая беззеркальная камера? Майк Бернхилл из Canon отвечает на 10 часто задаваемых вопросов о EOS R, EOS RP и объективах RF.
Узнайте больше

Подпишитесь на рассылку
Нажмите здесь, чтобы получать вдохновляющие истории и интересные новости от Canon Europe Pro
Если вы видите это сообщение, вы просматриваете веб-сайт Canon с помощью поисковой системы, которая блокирует необязательные файлы cookie. На вашем устройстве будут использоваться только обязательные (функциональные) файлы cookie. Эти файлы cookie необходимы для функционирования веб-сайта и являются неотъемлемой частью наших систем. Чтобы узнать больше, ознакомьтесь с нашим Уведомлением о файлах cookie.
На вашем устройстве будут использоваться только обязательные (функциональные) файлы cookie. Эти файлы cookie необходимы для функционирования веб-сайта и являются неотъемлемой частью наших систем. Чтобы узнать больше, ознакомьтесь с нашим Уведомлением о файлах cookie.
Удалите элемент или очистите [category], поскольку существует ограничение на 8 продуктов. Нажмите «Изменить»
Сбросить весь выбор?
Ультразвуковой мотор автофокуса. Ремонт. — мастерская lensservis.ru — LiveJournal
Ультразвуковой мотор автофокуса. Ремонт.
Самые массовые китовые объективы 18-55 у кэнона, никона, сони и других.
С этих объективов все начинают.
И потом они ломаются. Ломаются, когда уже приходит пора переходить на более продвинутые.
Они и сделаны на год не больше и то, если бережно к ним относиться.
Даже прибережном отношении со временем пластиковые детали начинают затирать.
Прилагается больше усилий, направляющие гнутся и зум ломается.
У меня об этом есть в постах по ремонту механики.
Этот пост про ремонт ультразвукового мотора, который просто изнашивается со временем.
Как извлечь мотор, я не пишу, нет ничего проще.
В моторе нечему ломаться, три детали.
Для усложнения задачи сломаем шлейф.
Ремонтируется прсто, всего три провода, средний земля.
И немного о работе самого двигателя, может, кто не знает.
На металлическое кольцо с ножками наклеены пъезопластины.
Когда к ним подается напряжение с частотой резонанса детали,это статор, он начинает колебаться.
Частота примерно 30 кГц, поэтому ультразвуковой мотор.
Ножки толкают ротор и происходит фокусировка.
Плата мотора выглядит так. DC-DC блок питания и 2 фазоинвертора, три провода к мотору.
Для сравнения просто электромотор не ультразвуковой, у кэнона выглядит так.
Разводка USM мотора имеет ещё один немаловажный контакт.
Это четвёртый контакт подстройки частоты блока питания.
Дело в том, что резонансная частота статора меняется в зависимости от температуры.
Если частота питания отличается от резонансной частоты, двигатель работает медленнее.
Нужно сказать, что с подстройкой частоты заморачивается только кэнон, сигма не особо.
Три контакта у сигмы.
Это кэноновский в процессе ремонта, 4 провода.
По большому счёту при сборке объектива на заводе частота блока питания должна подстраиваться до резонансной частоты статора.
В таком случае тупая замена мотора при ремонте невозможна. Нужно подстраивать частоту.
Вернемся к нашему мотору.
Поверхность статора очень чувствительна ко всяким инородным предметам, типа песчинок и нужна хорошая чистота поверхности ножек.
На работу двигателя влияет чистота поверхности и усилие прижимной пружины.
Будем считать, что усилие пружины не изменяется со временем, а вот поверхность истирается.
Я пробую шлифовать поверхность несколькими способами.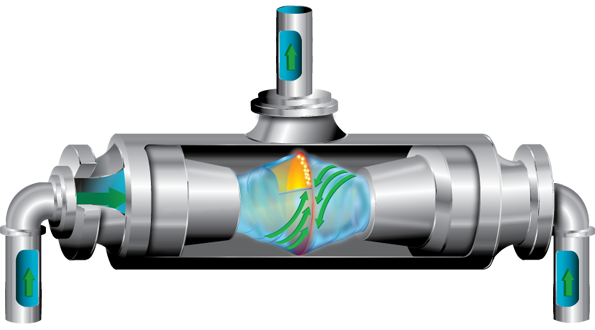
Для начала наждачкой 2500, результат плохой.
Ротор сразу нарабатывает задиры и двигатель клинит.
Пробую шлифовать в зеркало на войлочном круге.
Поверхность красивая, но ротор, как бы прилипает, пищит и двигатель плохо вращается.
Последний способ и самый результативный шлифовка с пастой гои на зеркале.
Оказалось важно даже не чистота поверхности а её плоскостность.
Нет предела совершенству.
Шлейф меняется просто
Провода напаиваются и покрываются поксиполом.
Здесь одна тонкость, прижим деталей усиливается за счёт увеличения толщины статора и двигатель может не пойти.
Лишний клей убираем.
Пружину можно укоротить, но тогда прижим будет совсем непонятный.
В сборе, как то так.
И испытания.
Отдельно двигатель вращается.
С редуктором вращается
Тубус объектива вращает
Это для общего развития замер напряжения на двигателе.
Пиковое напряжение доходит до 19 вольт, бъет чувствительно.
А знаете как проверить работает ли статор отдельно?
Погрузить его в воду и получите фонтан. Я не снял, а сейчас уже лень разбирать двигатель.
Да и ещё, эти двигатели не ремонтопригодны их просто меняют.
Причем, если заменить на донорский с поломанного объектива, неизвестно сколько он проработает.
Успехов в фотографии.
Ультразвуковые пьезодвигатели PILine®
- Линейное и вращательное движение
- Практически неограниченный диапазон перемещений
- Простая механическая интеграция
- Удерживающая сила до 15 Н, удерживающий момент до 0,3 Нм, разрешение скорости 0005 900 с до 2 нм
Комбинации двигатель-шпиндель преобразуют вращательное движение двигателя в поступательное движение, при этом время отклика увеличивается из-за люфта между механическими компонентами. Однако приводы, такие как PILine®, создают прямолинейное движение с большей стабильностью и меньшей инерцией.
Однако приводы, такие как PILine®, создают прямолинейное движение с большей стабильностью и меньшей инерцией.
Приводы PILine® избавляются от механической сложности классических комбинаций роторный двигатель/редуктор/шпиндель в пользу затрат и надежности. Эти компоненты могут быть очень подвержены износу, особенно в миниатюрных системах.
Неотъемлемой частью ультразвукового пьезодвигателя является пьезоактюатор, который прижимается к подвижному направляющему элементу с помощью соединительного элемента. Пьезокерамический привод возбуждается ультразвуковыми колебаниями с высокочастотным переменным напряжением от 100 до 200 кГц. Деформация привода приводит к периодическому диагональному движению соединительного элемента относительно бегунка. Создаваемая подача составляет несколько нанометров за цикл; высокие частоты приводят к высоким скоростям.
Двигатели PILine® могут вызывать вращательное движение одним из двух способов: По аналогии с линейным движением пьезокерамические приводы воздействуют сбоку на кольцеобразную направляющую , создавая таким образом быстрое вращательное движение. Создаваемый удерживающий момент составляет примерно 0,3 Нм.
Создаваемый удерживающий момент составляет примерно 0,3 Нм.
Реализация вращательного движения: двигатели PILine® воздействуют на кольцеобразную направляющую.
Небольшие вращающиеся столики диаметром 20 мм или 30 мм используют кольцеобразный привод. Этот тип привода достигает очень высоких скоростей более двух оборотов в секунду. Удерживающий момент составляет примерно 30 мНм.
Предварительное натягивание пьезокерамических приводов на бегунок обеспечивает самоблокировку привода в состоянии покоя и при выключенном питании. В результате он не потребляет никакой энергии, не нагревается и удерживает положение механически стабильным. Применения с низким рабочим циклом, работающие от батареи или чувствительные к теплу, выигрывают от этих характеристик.
Движение пьезокерамического привода основано на кристаллических эффектах и не подвержено износу . С другой стороны, соединение с бегунком подвержено трению. В зависимости от режима работы достигается дальность поездки более 2000 км или среднее время наработки на отказ 20 000 часов.
В зависимости от режима работы достигается дальность поездки более 2000 км или среднее время наработки на отказ 20 000 часов.
Пьезодвигатели от PI в принципе совместимы с вакуумом и подходят для работы в сильных магнитных полях . Для этой цели доступны специальные версии приводов.
Преимущества небольшой конструктивной высоты приводов PILine ® становятся очевидными при использовании таких систем позиционирования, как поперечный столик микроскопа M-687 (высота 25 мм): неизменно плоская конструкция без шпиндельных каналов или фланцевых двигателей.
Продукция PILine®: поворотный столик U-651 и перекрестный столик микроскопа M-686K
Надежная конструкция с прямым приводом и малое время отклика пьезокерамики обеспечивают очень быстрый старт/стоп и скорости до нескольких 100 мм/с.
Потребность в более высоких скоростях сканирования или большей пропускной способности характеризует лишь некоторые приложения в микроскопии. Другие требуют движения с высоким разрешением на низких постоянных скоростях.
Другие требуют движения с высоким разрешением на низких постоянных скоростях.
Сцены с приводами PILine® могут быть оснащены датчиками PIOne и могут достигать разрешения в диапазоне одиночных нанометров. Затем специальные процессы управления и регулирования обеспечивают постоянную скорость в диапазоне отсчетов одного энкодера в секунду.
Скорость без обратной связи по отношению к активной силе при максимальной мощности двигателя
Частота сканирования каскада PILine® в зависимости от амплитуды и полосы установления синусоидального движения
Пример высокой замкнутой динамики этого этапа. 10 шагов в положительном направлении движения, затем 10 шагов в отрицательном направлении движения, каждый шаг 5 мкм в течение 5 мс. Требуются специальные параметры и использование аппаратных триггеров.
Белая бумага
Возможности управления движением Piline® Ultrasonic Piezo Motor
Английский
ДРУГИЕ
Руководство по отбору для лучшего решения
Английский
Скачать
Белая бумага
Lift Time, Wear and Relabitive of Piline.
Английский
Скачать
Возможности позиционирования ультразвуковых двигателей
XY-микроскопический столик U-780 PILine/M-687 с ультразвуковым линейным двигателем (слева) рядом с миниатюрным трансляционным столиком M-663 PILine® с ультразвуковым линейным двигателем (справа) (изображения: PI)
1. Обзор
В то время как обычные системы позиционирования преобразуют вращательное движение двигателя в поступательное движение с помощью шпинделя, системы позиционирования PILine® основаны на специальном прямом приводе. Это полностью устраняет люфт и люфт, а также увеличивает время отклика и точность позиционирования. Кроме того, они обеспечивают позиционирование с высоким разрешением и высокую производительность.
(слева) Сердце ультразвукового двигателя. Различные размеры привода для линейного и вращательного движения.
(справа) Посмотрите видео «Прецизионное управление движением с помощью ультразвуковых пьезодвигателей»
В то же время сверхмедленное движение может быть реализовано с постоянными скоростями вплоть до нескольких нм в секунду.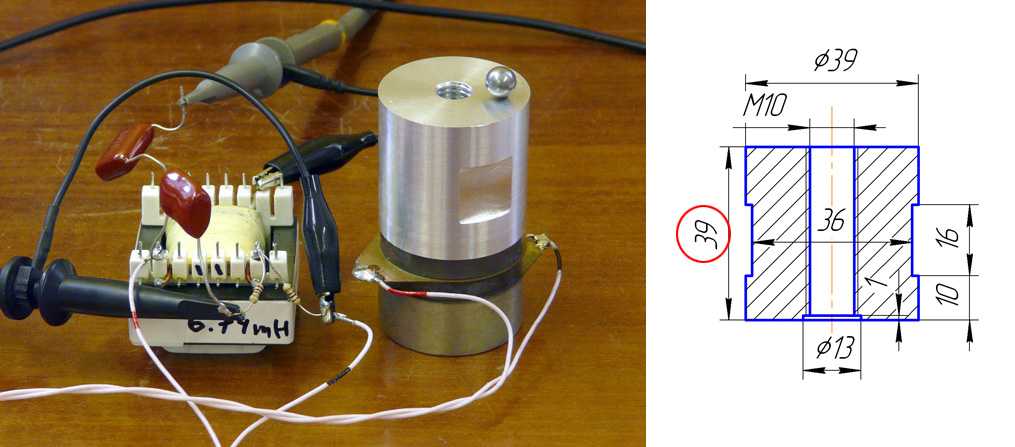 В этом техническом документе основное внимание уделяется обзору возможностей и показано, как максимально эффективно использовать линейные каскады PILine® специально для вашего приложения.
В этом техническом документе основное внимание уделяется обзору возможностей и показано, как максимально эффективно использовать линейные каскады PILine® специально для вашего приложения.
2. Принцип работы систем позиционирования PILine®
Системы позиционирования PILine® основаны на ультразвуковых пьезодвигателях, способных к линейному перемещению с прямым приводом. Пьезоэлектрический привод прижимается к бегунку с помощью соединительного элемента (см. рис. 1).
Рис. 1. Схема двигателя PILine®: пьезоэлектрический привод предварительно нагружен на бегунок. Электрическое возбуждение привода вызывает колебания. Это колебание преобразуется в поступательное движение, которое затем передается на бегунок с помощью соединительного элемента. Положение бегунка регистрируется стационарным датчиком (энкодером), который подсчитывает периоды решетки, прикрепленной к бегунку (Изображение: PI)
Электрическое возбуждение пьезоэлектрического привода на его резонансной частоте1 вызывает колебания. Из-за предварительного натяга колебания привода преобразуются в непрерывное движение подачи соединительным элементом, который перемещает бегунок.
Из-за предварительного натяга колебания привода преобразуются в непрерывное движение подачи соединительным элементом, который перемещает бегунок.
Предварительная нагрузка также приводит к самоблокировке привода в состоянии покоя. Скорость движения можно регулировать, изменяя амплитуду возбуждения и, следовательно, количество энергии, передаваемой бегуну.
Изменения положения столика точно обнаруживаются инкрементным или, в некоторых случаях, абсолютным датчиком линейных перемещений. Количество отсчетов, записанных энкодером, пропорционально пройденному расстоянию. Субнанометровое разрешение возможно благодаря использованию современных датчиков и решеток.
Обратите внимание, что для точного воспроизведения разрешения датчика двигатель должен работать в режиме обратной связи.
Прямое измерение скорости с помощью этого метода невозможно. Однако, измеряя время ΔT = T 2 — T 1 Требуется для прохождения расстояния ΔS = S 2 — S 1 , Velocity может быть из соотношения v = Δs / Δt.![]()
Имейте в виду, что расстояние Δs варьируется в зависимости от используемой частоты дискретизации 1/Δt, поэтому для постоянства скорости получаются разные результаты (= v фактическая / v заданная – 1) , несмотря на одинаковое движение столика (см. рис. 2).
Рис. 2. Постоянство скорости в зависимости от положения; записано несколько раз с двумя разными частотами дискретизации. Небольшие локальные изменения скорости имеют значительно большее влияние при высокой частоте дискретизации (Изображение: PI)
В зависимости от конкретной области применения, клиент может быть заинтересован в том, чтобы этап достиг цели назначения как можно быстрее (за счет точности) или как можно точнее (с оговорками по требуемому времени). Оба требования подробно рассматриваются в следующих главах.
2.1 Стабильность: принцип самозажима
Скорость и разрешение — не единственные критерии для точных приложений управления движением. Благодаря предварительному натягу и принципу привода керамика/керамика ультразвуковой двигатель действует как тормоз, когда он не находится под напряжением. Эта функция имеет решающее значение для приложений, где важна долговременная стабильность, например, в микроскопии сверхвысокого разрешения и визуализации. Испытания с ультразвуковыми двигателями в установке оптического захвата показывают значительно лучшую стабильность, чем столики с винтовым приводом, особенно в течение длительных периодов времени.
Благодаря предварительному натягу и принципу привода керамика/керамика ультразвуковой двигатель действует как тормоз, когда он не находится под напряжением. Эта функция имеет решающее значение для приложений, где важна долговременная стабильность, например, в микроскопии сверхвысокого разрешения и визуализации. Испытания с ультразвуковыми двигателями в установке оптического захвата показывают значительно лучшую стабильность, чем столики с винтовым приводом, особенно в течение длительных периодов времени.
Более подробная информация доступна в документе ниже.
Приводы и критерии проектирования для позиционирования
с нанометровым разрешением и стабильностью
Учить больше
3. Быстрое позиционирование
При наведении на положение встроенный генератор профиля контроллера PILine® (например, C-867) создает профиль скорости для двигателя, который состоит из трех областей (см. рис. 3): (A) ускорение, (B) постоянная скорость и (C) замедление и стабилизация.
рис. 3): (A) ускорение, (B) постоянная скорость и (C) замедление и стабилизация.
Рис. 3 Пример профиля положения и скорости, созданного контроллером PILine®. Его можно разделить на три области: ускорение (A), постоянная скорость (B) и замедление и стабилизация (C) (Изображение: PI)
Каждый из этих регионов можно настроить индивидуально, отрегулировав соответствующие параметры контроллера. Для лучшего понимания принципы сервоалгоритма будут объяснены перед обсуждением отдельных параметров далее в этой главе.
Ступени PILine® обычно работают в режиме обратной связи, где для компенсации отклонений траектории используется пропорционально-интегрально-дифференциальный (ПИД) алгоритм. Сравнение фактического положения (полученного от датчика) с заданным положением возвращает следующую ошибку , которая служит переменной процесса для алгоритма PID. Используя константу , пропорциональную, интегральную и производную ПИД-членов, выходной сигнал контроллера настраивается в попытке минимизировать следующая ошибка.
Контроллер поддерживает до пяти независимых наборов ПИД-параметров (от 0 до 4). Как показано на рис. 4, эти наборы PID располагаются концентрически вокруг заданной позиции или вокруг целевого положения (по умолчанию), в зависимости от стратегии изменения окна (параметр 0x4D ).
Пропорциональный, интегральный и производный параметры должны уменьшаться с увеличением номера набора PID. количество используемых наборов параметров можно настроить с помощью параметра 0x400. Рекомендуется работать с тремя комплектами. Каждый набор параметров PID содержит два окна: окно ввода и окно выхода, указание области активации.
Рис. 4 Окна входа и выхода конфигурации с тремя наборами PID представлены разными цветами. Окна могут быть центрированы вокруг заданного положения (a) или вокруг целевого положения (b; настройка по умолчанию). Самый внутренний набор PID (0, зеленый) активируется только после начала установления; т.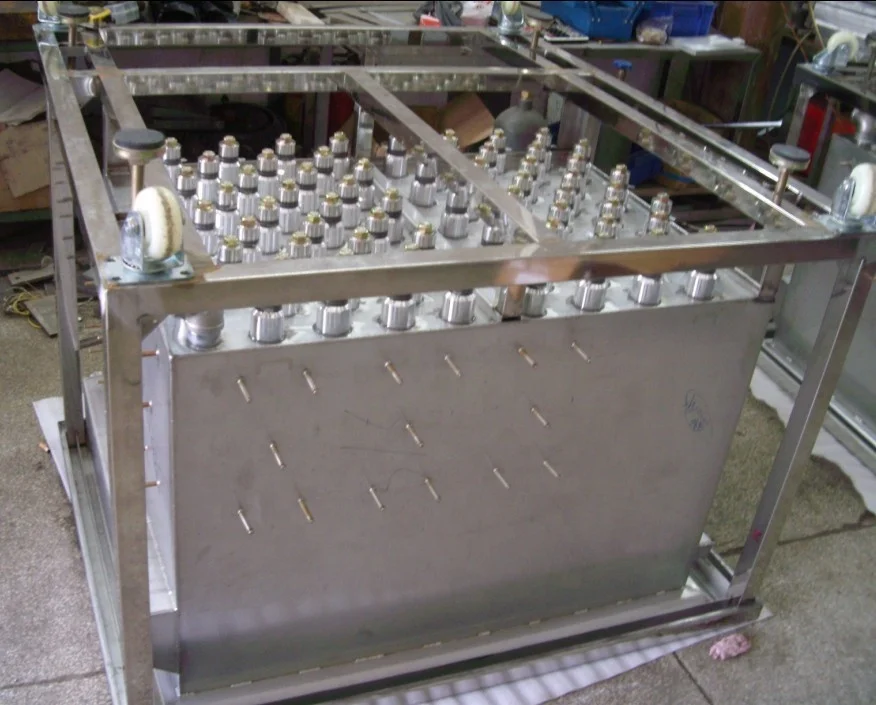 е. когда заданное положение равно заданному положению. Обратите внимание, что в (b) самый внешний набор PID (2, красный) уже активен до того, как фактическое положение ступени достигнет соответствующего окна ввода (Изображение: PI)
е. когда заданное положение равно заданному положению. Обратите внимание, что в (b) самый внешний набор PID (2, красный) уже активен до того, как фактическое положение ступени достигнет соответствующего окна ввода (Изображение: PI)
Как только фактическое положение ступени достигает одного из окон ввода, автоматически активируется соответствующий набор PID. По определению, выход окна должен быть больше, чем вход окна , чтобы предотвратить немедленное переключение параметров обратно. Параметр выхода из окна самого внешнего набора PID игнорируется контроллером PILine®, оставляя этот набор PID активным, даже когда ступень выходит из окна.
Набор параметров ПИД-регулятора 0 ( 0x401 9от 0104 до 0x407 ) играет особую роль в регулировании установившегося режима – он активируется только после завершения заданной траектории (см. рис. 4). Другие наборы PID (от 1 до 4, 0x411 — 0x447 ) определяют поведение во время движения сцены.
3.1 Область A: Ускорение
В этой области ступень ускоряется до достижения максимальной скорости, заданной генератором профиля.
Область ускорения можно уменьшить на
- увеличение ускорение параметр
- регулировка смещение привода параметры
В качестве быстрой и простой первой меры попробуйте увеличить ускорение двигателя (0xB), , для которого по умолчанию установлено довольно консервативное значение (см. рис. 5).
Рис. 5 Время позиционирования можно сократить, используя более высокие значения ускорения. Пунктирные линии обозначают время установления образцового линейного столика PILine® (Изображение: PI)
Обратите внимание, что более высокое ускорение может сократить срок службы продукта.
Обязательно контролируйте выход двигателя контроллера c : в нормальных условиях двигатель должен работать с выходом двигателя примерно 50 % параметра максимальной выходной мощности двигателя (0x9). Верхние 20 % мощности двигателя предназначены для резерва управления. По этой причине работа v oid выше значения выходного сигнала двигателя , равного 80 %, во избежание повреждения двигателя.
Верхние 20 % мощности двигателя предназначены для резерва управления. По этой причине работа v oid выше значения выходного сигнала двигателя , равного 80 %, во избежание повреждения двигателя.
Второй способ сокращения области разгона заключается в настройке параметров напряжения смещения контроллера. Прежде чем сцена сможет начать движение, необходимо устранить трение между соединительным элементом и бегунком. Для этого контроллер постепенно увеличивает мощность двигателя. Время задержки, связанное с этим процессом, можно уменьшить, увеличив параметр смещения привода (0x48), , который устанавливает начальное значение выходного напряжения двигателя (см. рис. 6).
Рис. 6. Регулировка параметра смещения привода уменьшает время задержки перед пуском (указано стрелками), вызванное первоначальным заеданием между соединительным элементом и рабочим колесом (Изображение: PI)
Кроме того, компенсация нагрузки столика в зависимости от направления (например, при вертикальной установке) достигается за счет настройки параметров положительное смещение двигателя (0x33) и отрицательное смещение двигателя (0x34). Эти смещения применяются вместе со смещением электропривода . Подходящие начальные значения можно найти и установить с помощью следующего макроса хоста в PIMikroMove:
Эти смещения применяются вместе со смещением электропривода . Подходящие начальные значения можно найти и установить с помощью следующего макроса хоста в PIMikroMove:
Рисунок 7. Запуск этого макроса хоста в PIMikroMove определит мощность двигателя, необходимую для трогания, как в положительном, так и в отрицательном направлении. Затем эти значения сохраняются как положительные и отрицательные смещения двигателя (0x33, 0x34) в энергозависимой памяти контроллера.
3.2 Область B: Постоянная скорость
В этой области ступень достигла постоянной максимальной скорости.
Область постоянных скоростей можно уменьшить, увеличив st age speed (параметр 0x49 ).
В некоторых случаях, особенно при преодолении коротких дистанций, ступень может сразу перейти от ускорения (область А) к замедлению (область С), не достигая максимальной скорости. Если да, попробуйте увеличить ускорение (0xB) и замедление (0xC) параметры.
Если да, попробуйте увеличить ускорение (0xB) и замедление (0xC) параметры.
Пьезоповоротные приводы Theodolite
3.3 Область C: Замедление и стабилизация
В этой области двигатель замедляется по мере приближения к целевому положению.
Область замедления можно уменьшить,
- увеличив замедление параметр
- регулировка Интегральный термин PID SET 2
- Увеличение Окно Enter из PID SET 0
Увеличение Deceleration Параметр (0xc) аналогично увеличению Acceleration (0xc) аналогично увеличению Acceleration 44404 40104. объясняется в главе 3.1.
Более быстрое торможение также можно получить, увеличив интегральный член второго набора PID (параметр 0x422 ). Это увеличивает скорость втягивания ступени в окно стабилизации (настройка PID 0), как показано на рис. 8.
8.
Если точность не имеет первостепенного значения, введите в окно параметр ПИД-регулятора, установленный на 0 (называемый «окном установления», (0x406) можно расширить для достижения более раннего установления, как показано на рис. 9.
Рис. 9. Увеличение области осаждения на рис. 4. Окно стабилизации по умолчанию (a) по сравнению с увеличенным окном стабилизации (b), что приводит к более раннему осаждению (обозначения см. на рис. 4) (Изображение: PI)
4. Точное позиционирование
Когда требуется особенно точное позиционирование, необходимо учитывать оговорки по скорости позиционирования. Более высокая точность может быть достигнута при использовании меньшего окна стабилизации; т. е. путем уменьшения окна введите 0 (0x406) и окна выхода 0 (0x407) параметров.
Достижимая точность позиционирования ограничена периодом деления шкалы, точностью датчика и интерполяционным коэффициентом электроники датчика. Для более высокой точности рассмотрите приобретение:
Для более высокой точности рассмотрите приобретение:
- st Возраст с более мелкими периодами решетки
- c Контроллеры с внутренней интерполяцией
Датчик, как указано в главе 2; определить положение и скорость сцены. В системах позиционирования PILine® могут использоваться оптические и магнитные инкрементальные и абсолютные датчики в зависимости от требуемой точности, энергопотребления и экономической эффективности. В большинстве случаев используются оптические инкрементальные датчики. Эти датчики определяют расстояние до заданной контрольной точки, записывая периодический рисунок (называемый решеткой) на шкале.
Используемые периоды решетки составляют от нескольких до нескольких десятков микрометров. С помощью двух фотодиодов с фазовым сдвигом 90° генерируются два синусоидальных сигнала, что позволяет определять направление движения. Затем эти сигналы обрабатываются схемой интерполяции, которая разбивает каждый период на несколько равноотстоящих импульсов. Окончательное разрешение соответствует периоду решетки, деленному на коэффициент интерполяции.
Окончательное разрешение соответствует периоду решетки, деленному на коэффициент интерполяции.
При использовании столика PILine® с современным датчиком PIOne (PI Optical Nano Encoder) с периодом сигнала датчика 0,5 мкм и коэффициентом интерполяции >1000 можно достичь разрешения субнм.
Обычно интерполяторы с коэффициентами интерполяции от 256 до 8192 интегрируются непосредственно в электронику столика. Некоторые каскады PILine® имеют переключатель для обхода этого встроенного интерполятора. В этом случае выходной сигнал изменяется с внутренних интерполированных отсчетов A/B на необработанные синусоидальные/косинусоидальные сигналы, которые могут быть дополнительно обработаны внешним интерполятором.
Новый контроллер PILine® C-867.1U оснащен встроенным интерполятором с коэффициентом интерполяции до 20 000, что позволяет многократно увеличить разрешение существующих каскадов. Приложения, требующие точного позиционирования, а также очень медленного движения, выигрывают от этого увеличения разрешения (см. рис. 10).
рис. 10).
Рис. 10. Траектория настроенного столика PILine® M-683 с датчиком PIOne, внешняя интерполяция с помощью контроллера PILine® C-867.1U. Профиль заданного положения воспроизводится очень точно (Изображение: PI)
5. Контролируемое позиционирование с приоритетом на траектории
Двигатели PILine® имеют широкий динамический диапазон скоростей от 10 нм/с до > 100 мм/с, который можно разделить на три характерных диапазона:
- Ультрамедленное движение (от 10 нм/с до 10 мкм/с)
- Медленное движение (от 10 мкм/с до 1 мм/с)
- F ast движение (> 90 мм26)
Особенности и проблемы каждого из этих диапазонов скоростей будут обсуждаться в следующих подразделах.
5.1 Сверхмедленное движение (от 10 нм/с до 10 мкм/с)
Видео: Замедленная съемка с высокостабильным пьезомоторным столиком
Позиционирование на сверхмалых скоростях необходимо при сканировании мелких объектов; например, при использовании микроскопа с столиком PILine® в ручном режиме. Настройка параметров ПИД-регулятора и контроллера в соответствии с предполагаемым использованием является обязательной для достижения оптимальной производительности каскада.
Настройка параметров ПИД-регулятора и контроллера в соответствии с предполагаемым использованием является обязательной для достижения оптимальной производительности каскада.
Ключевым требованием для этого диапазона скоростей является равномерное движение. Для этой цели некоторые контроллеры PILine® (например, C-687.262) предлагают так называемое включение второй фазы. В этом режиме неиспользуемый электрод двигателя приводится в действие вторичным выходным каскадом; амплитуду можно установить с помощью смещение двигателя параметр (0x6F). Это приведет к корректировке вектора прямой подачи соединительного элемента, что уменьшит пусковой момент.
С другой стороны, в этом режиме поступательное усилие уменьшается. Наилучшие результаты достигаются при использовании значений смещения двигателя от 50 % до 70 % от максимальной мощности двигателя параметра (0x9).
Ошибки рассогласования, возникающие, в частности, в этом диапазоне скоростей, должны быть компенсированы путем увеличения П-члена текущего ПИД-регулятора до очень высокого значения (см.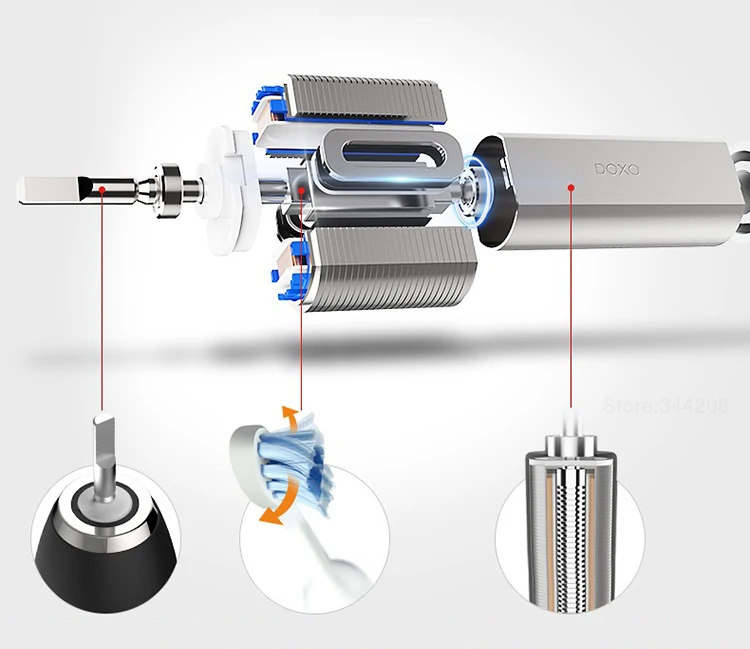 главу 6). Если предположить, что сцена хорошо настроена, фактическая траектория может точно воспроизвести сгенерированный профиль, как показано на рис. 11.
главу 6). Если предположить, что сцена хорошо настроена, фактическая траектория может точно воспроизвести сгенерированный профиль, как показано на рис. 11.
Рис. 11 Сверхмедленное движение со скоростью 1 мкм/с до и после оптимизации P-term. Оптимизированный пропорциональный член заставляет ступень точно воспроизводить заданный профиль положения (Изображение: PI)
Контроллеры PILine® также имеют схему регулирования для автоматической регулировки частоты возбуждения, которая может мешать ПИД-регулированию. Прежде чем приступить к оптимизации P-term, убедитесь, что автоматический поиск частоты (0x52) выключен. Кроме того, небольшое увеличение выходной частоты (0x51) может оказаться полезным при медленном вождении.
5.2 Замедленная съемка (от 10 мкм/с до 1 мм/с)
Типичные области применения для этого диапазона скоростей включают в себя захват изображений с запуском или лазерную резку клеток.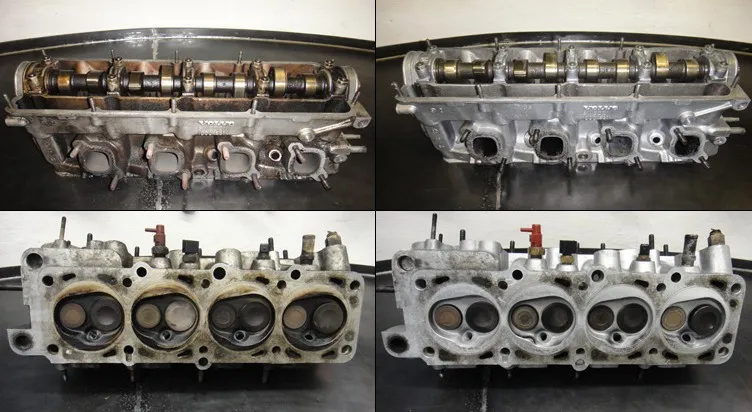
В этом диапазоне скоростей может возникать дребезжащий шум, создаваемый периодическим переключением режима сцепления соединительного элемента. Шум может показаться раздражающим; однако причина этого не вредна для двигателя. Его можно устранить, запустив двигатель с вторичной фазой с помощью смещение двигателя параметр (0x6F), , как описано в главе 5.1. Использование вторичной фазы также снижает ошибку позиционирования, а также требуемую мощность двигателя.
5.3 Быстрое движение (>1 мм/с)
Этот диапазон скоростей в основном используется для быстрых ступенчатых приложений. Типичными вариантами использования являются позиционирование линз на пути луча или применение затвора. Здесь главное требование — быстрое и точное позиционирование; форма траектории играет второстепенную роль.
В большинстве случаев настройки контроллера по умолчанию можно принять без необходимости трудоемкой настройки. Кроме того, использование двухфазного срабатывания (смещение двигателя) не требуется и фактически может привести к более низким конечным скоростям и меньшему поступательному усилию.
6. Движение по траектории с минимальным отклонением положения
Когда требуется минимальная ошибка положения, P-составляющая активного набора параметров ПИД-регулятора должна быть скорректирована в соответствии с текущей скоростью ступени. I- и D-члены менять не нужно; однако в некоторых случаях их уменьшение может быть полезным. На рис. 12 показаны эмпирически определенные P-члены типичной ступени PILine®, для которой минимум после ошибки .
Рис. 12. Пример диаграммы зависимости P-члена от скорости линейного столика PILine®, построенной в логарифмическом масштабе. К вашей сцене могут применяться другие значения (Изображение: PI)
Чтобы получить наименьшую возможную ошибку следования независимо от скорости, во всех поддерживаемых программных средах может быть реализована функция, настраивающая P-член на текущую скорость, например. с помощью эмпирической формулы или таблицы поиска.