Классификация и устройство машин переменного тока
- Подробности
- Категория: Электрические машины
- электродвигатель
Основные виды машин переменного тока
Машины переменного тока по количеству фаз делятся на много фазные и однофазные. Наиболее часто машины выполняются трехфазными в соответствии с применяемой в энергетических установках системой трехфазного тока. Для автоматических устройств и для бытовых электроприборов применяются двухфазные машины и иногда однофазные. В основе работы многофазных машин и некоторых однофазных лежит образование вращающегося магнитного поля.
Каждая машина переменного тока, так же как машина постоянного тока, состоит из статора и ротора. По способу образования магнитного поля статора и ротора машины переменного тока делятся на две группы: асинхронные и синхронные.
А. Асинхронная машина. Асинхронной машиной называется машина переменного тока, у которой скорость вращения ротора зависит от нагрузки. Магнитное поле в асинхронной машине создается переменным током обмоток статора и ротора. Скорость вращения ротора отличается от скорости вращения поля.
Магнитное поле в асинхронной машине создается переменным током обмоток статора и ротора. Скорость вращения ротора отличается от скорости вращения поля.
Асинхронные машины делятся на бесколлекторные и коллекторные. Бесколлекторные асинхронные машины являются наиболее распространенными электрическими машинами в народном хозяйстве и применяются главным образом в качестве двигателей. Коллекторные асинхронные машины имеют большее разнообразие характеристик по сравнению с бесколлекторными, используются также в качестве двигателей, но имеют ограниченное применение.
Основным типом асинхронной бесколлекторной машины является трехфазный двигатель в двух главных исполнениях: двигатель с фазной обмоткой ротора (рис. 1,а) и двигатель с короткозамкнутой обмоткой ротора (рис. 1,6). Конструктивные схемы этих машин показаны на рис. 1, где 1 — сердечник статора, собранный из листовой электротехнической стали, 2 — трехфазная обмотка статора, включаемая в сеть переменного тока, 3 — сердечник ротора, 4 — фазная обмотка ротора, 5 — контактные кольца для соединения с пусковым или регулировочным реостатом, 6 — короткозамкнутая обмотка ротора.
Рис. 1. Конструктивная схема трехфазного асинхронного двигателя: а — с фазной обмоткой ротора, б — с короткозамкнутой обмоткой ротора
Б Синхронная машина. Синхронной машиной называется такая машина переменного тока, скорость вращения ротора которой равна скорости вращения первой гармоники поля статора и определяется
Рис. 2. Конструктивная схема трехфазного синхронного генератора
частотой / переменного тока в обмотке статора и количеством пар полюсов машины
(1)
Как правило, магнитное поле в синхронной машине создается обмоткой постоянного тока ротора и обмоткой переменного тока статора. В синхронных машинах малой мощности вместо обмотки постоянного тока на роторе используются постоянные магниты (магни-
тоэлектрические синхронные машины) или же магнитное поле создается только переменным током обмотки статора (реактивные синхронные машины). Синхронные машины широко применяются в качестве генераторов трехфазного переменного тока на электростанциях и используются также в качестве электродвигателей.
На рис. 2 изображена конструктивная схема трехфазной синхронной машины. Здесь 1 — сердечник статора, 2 — трехфазная обмотка статора, 3 — полюсы ротора с обмоткой постоянного тока, 4 — кольца для соединения обмотки ротора с источником постоянного тока, 5 — вентиляторы.
Рис. 3. Основные типы синхронных машин: а — с явнополюсным ротором, б — с неявнополюсным ротором
По устройству ротора различают два типа синхронной машины: машина с явнополюсным ротором, в которой катушки обмотки постоянного тока размещены на выступающих полюсах (рис. 3,а) и машина с неявнополюсным ротором, в котором распределенная обмотка постоянного тока уложена в пазы ротора (рис. 3,6).
Явнополюсная синхронная машина изготовляется для скорости вращения до 1500 об /мин и используется в качестве генератора или двигателя. Наиболее крупные синхронные машины устанавливаются на гидроэлектростанциях и приводятся во вращение водяными турбинами со скоростью до 300 об/мин.
Неявнополюсная синхронная машина используется в основном как генератор на тепловых электростанциях и приводится во вращение паровой турбиной со скоростью обычно 3000 об/мин (при частоте 50 Гц).
Общие элементы устройства и теории машин переменного тока
Обмотки статора обычно присоединяются к сети переменного тока и создают вращающееся магнитное поле, поэтому устройство этой части асинхронных и синхронных машин получается одинаковым. Сердечник статора изготовляется из листовой электротехнической
стали толщиной 0,5 мм.
На внутренней поверхности статора имеются пазы, в которые уложена обмотка. Форма паза зависит главным образом от мощности машины.
Рис. 4. Частично открытый паз
При мощности до 100 кет и напряжении до 500 в применяются частично открытие пазы (рис. 4). Изоляция обмотки от сердечника обычно трехслойная: два слоя электрокартона и между ними слой лакоткани или синтетической пленки. Общая толщина изоляции 0,3—0,7 мм. Стороны 1 мягких катушек из круглого провода укладывают через открытие 3 паза по одному или по нескольку проводников, затем края изоляции загибают и, таким образом, закрывают каждый паз. Стороны катушки в пазу удерживаются клином 2 из дерева или слоистого пластика.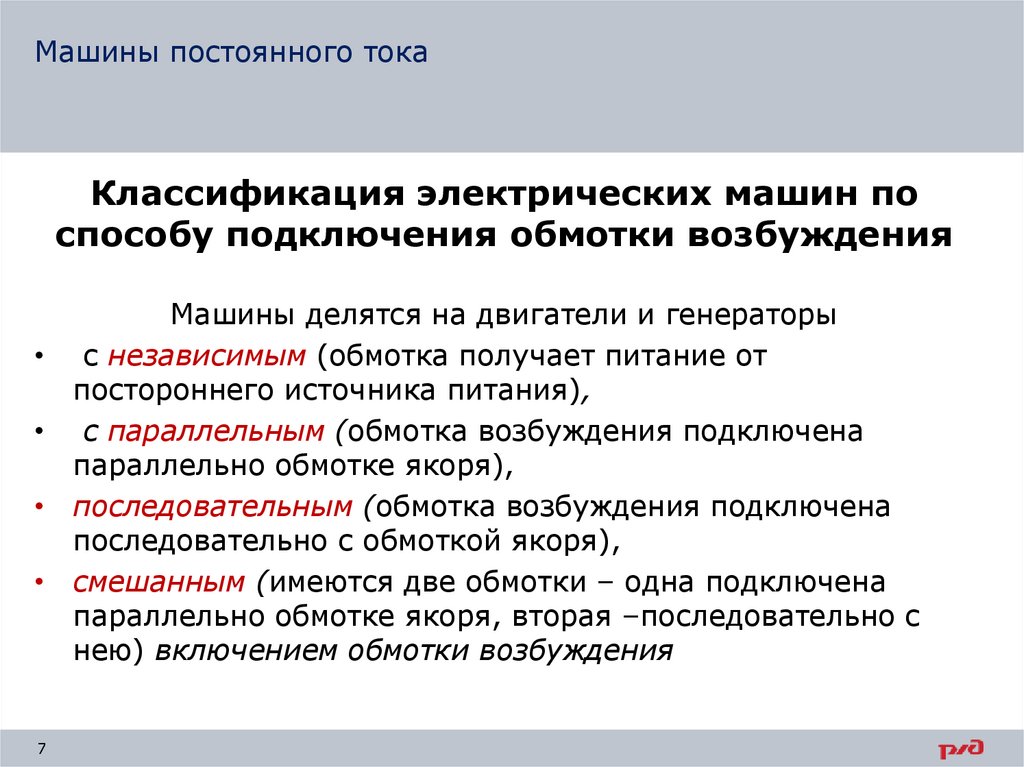
Рис. 5. Частично закрытый паз и изоляция обмотки
1 — прокладка из электрокартона пропитанного, толщиной 0,2 мм,
2 — лента миткалевая впритык, толщиной 0,15 лык, 3 — прокладка из электрокартона, толщиной 0,5 мм, 4— электрокартон пропитанный, толщиной 0,20 мм в 1 слой, 5 — лакоткань черная толщиной 0,3 мм в 1 слой, в — электрокартон пропитанный, толщиной 0,10 мм
впритык, 7 — прокладка из электрокартона толщиной 0,2 мм
Рис. 6. Открытый паз и изоляция обмотки
1 — прокладка из электрокартона (толщиной 0,5 лик), 2 — прокладка из миканита (толщиной 0,2 лык), 3 — микафолий (9 слоев толщиной 0,25 лш), 4 — электрокартон (1 слой толщиной 0.15 лык), 5 — прокладка из электрокартона толщиной 1,7 лык
Частично закрытые пазы (рис. 5) применяются для машин мощностью до 400 кет и напряжением до 500 в. В этом случае каждая катушка состоит из двух полукатушек, намотанных прямоугольным проводом. Полукатушкам придают окончательную форму на специальных шаблонах до укладки в пазы.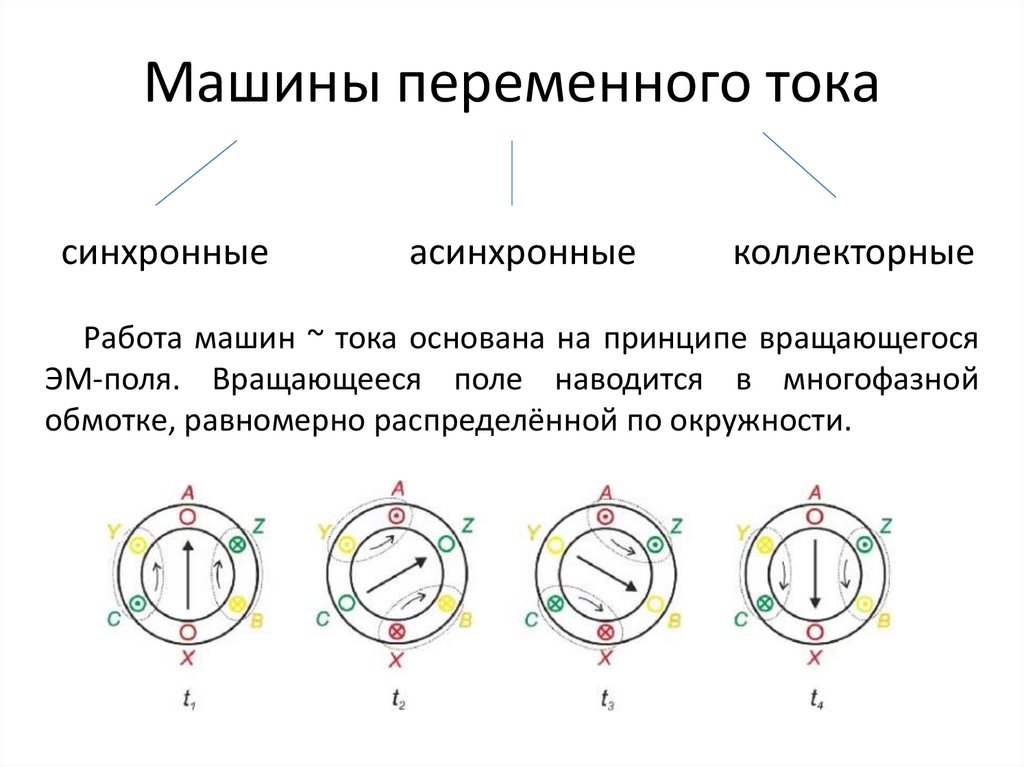
В машинах большой мощности и при напряжении выше 500 в катушки изготовляются из прямоугольного провода и изолируются до укладки в прямоугольные пазы (рис. 6).
- Назад
- Вперёд
- Вы здесь:
- Главная
- Оборудование
- Эл. машины
- Круговой огонь на электрической машине
Еще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
Классификация электрических машин
Автор: admin Генераторы постоянного тока, Двигатели постоянного тока, Машины переменного тока, Машины постоянного тока, Электрические машины
Электрической машиной называется электромеханический преобразователь энергии, предназначенный для преобразования либо электрической энергии в механическую, либо механической энергии в электрическую.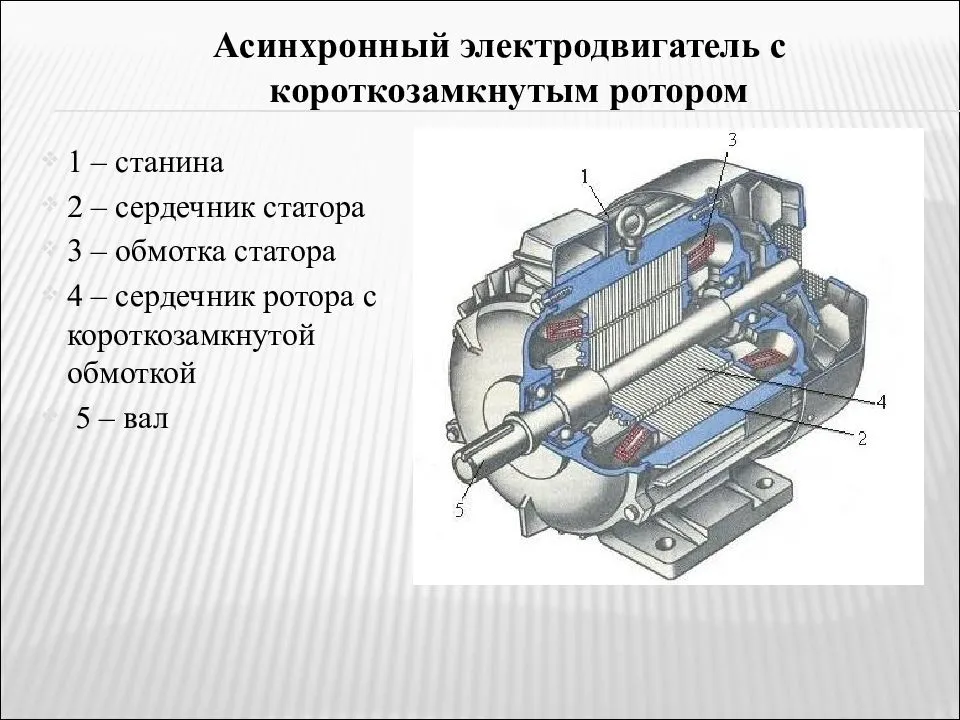
Если электрическая машина преобразует механическую энергию в электрическую, она называется генератором. Электрическая машина, которая преобразует электрическую энергию в механическую, называется двигатель.
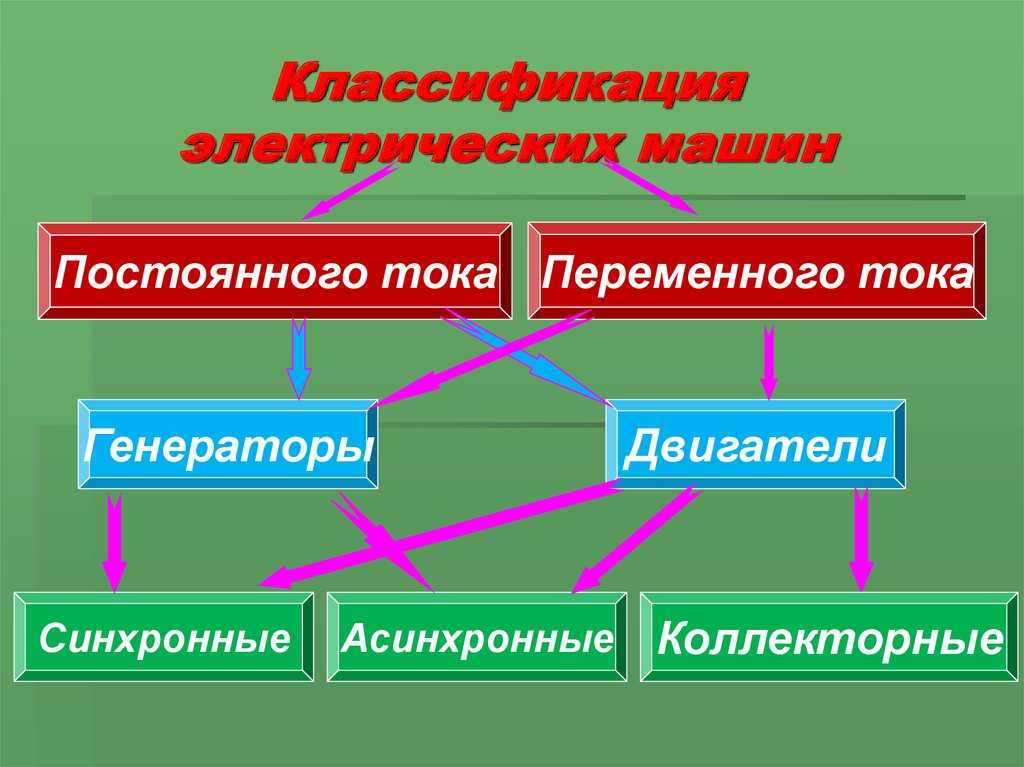
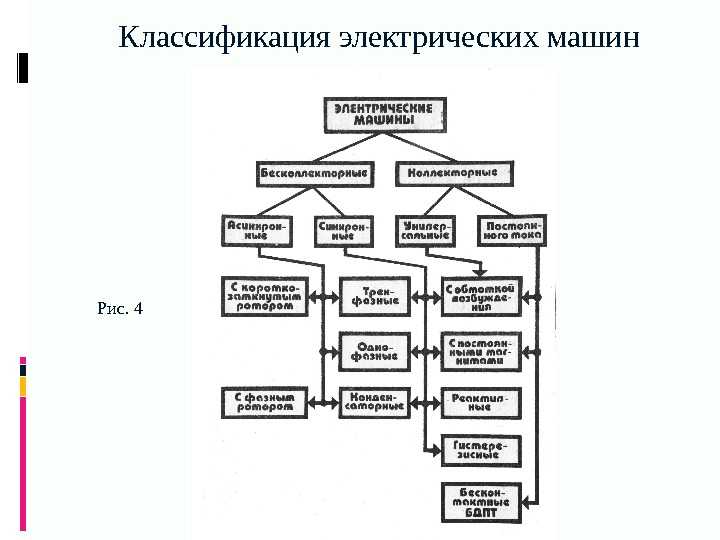
Существует много различных признаков, по которым электромашины делятся на группы. Основным из них является род тока. По роду тока электромашины делятся на 2-е большие группы: машины постоянного тока и машины переменного тока.
Внутри каждой из этих групп имеется также деление по различным признакам. Так, например, машины постоянного тока подразделяют по способу возбуждения:
1. Независимое возбуждение. При нем обмотка возбуждения не имеет электрической связи с обмоткой якоря.
2. Параллельное возбуждение. При нем обмотка возбуждения подключается параллельно обмотке якоря и имеет с ним электрическую связь.
3. Последовательное возбуждение: обмотка возбуждения соединяется с обмоткой якоря последовательно.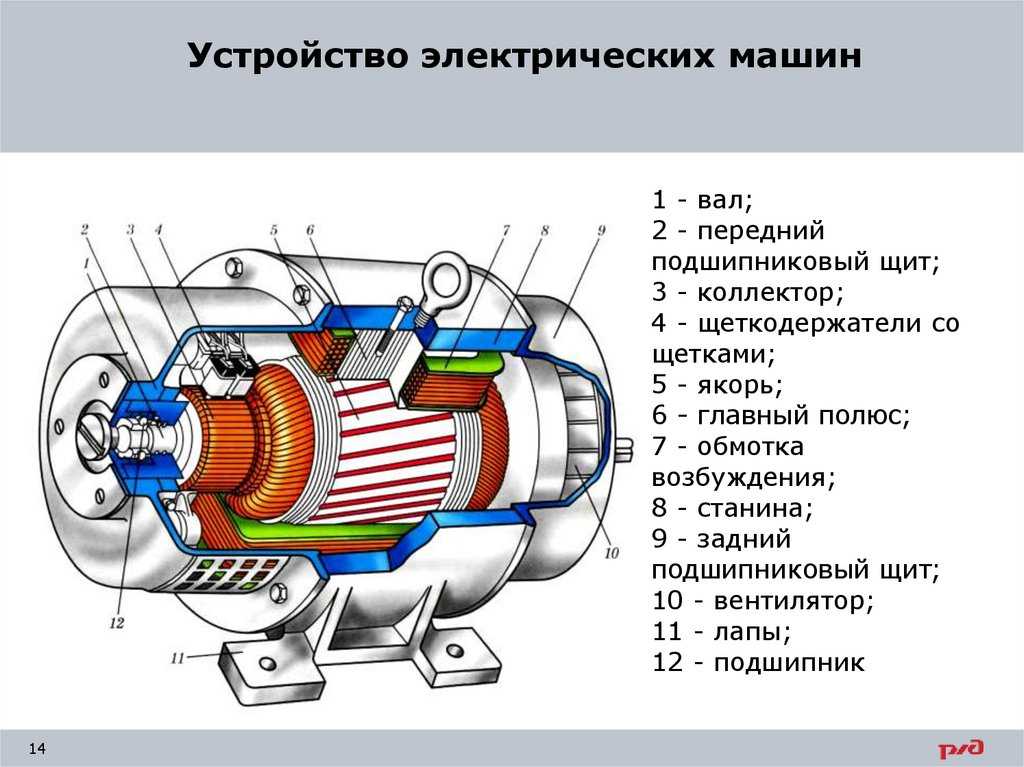
4. Смешанное возбуждение: обе обмотки возбуждения имеют электрическую связь с обмоткой якоря.
От способа возбуждения зависят характеристики машины постоянного тока. Причем все 4 способа возбуждения могут быть и у генераторов постоянного тока и у двигателей постоянного тока.
Машины переменного тока по принципу действия подразделяют на синхронные и асинхронные.
Синхронной машиной переменного тока называется машина, у которой скорость вращения вала равна скорости вращения магнитного поля статора.
Асинхронной машиной называется машина, у которой скорость вращения вала не равна скорости вращения магнитного поля статора.
Машины переменного тока подразделяются по конструкции ротора в зависимости от типа машины. Асинхронные делятся на машины с короткозамкнутым ротором и машины с фазным ротором.
Синхронные машины по конструкции ротора делятся на машины с явновыраженными полюсами и машины с неявновыраженными полюсами.
Кроме того, все электромашины независимо от рода тока подразделяются по мощности на:
1. микромашины мощностью до 1 кВт;
2. малой мощности от 1 до 10 кВт;
3. средней мощности 50-70 кВт;
4. крупные машины 100 кВт и выше.
По напряжению электромашины делятся на низковольтные (до 1000 В) и высоковольтные (свыше 1000 В). Машины постоянного тока обычно изготавливаются на напряжение 220 В или 440 В. Машины переменного тока (в основном асинхронные) изготавливаются на напряжение 380 В или 660 В. Синхронные машины чаще всего изготавливаются на напряжение 6 кВ и 13 кВ.
Электромашины независимо от рода тока подразделяются на группы по области применения, причем в зависимости от области применения изменяется их конструкция.
Синхронные машины в зависимости от того, с каким источником механической энергии они соединяются, подразделяются на гидрогенераторы и турбогенераторы (если соединяются с тепловой турбиной), а также дизельгенераторы. Синхронные двигатели, как правило, изготавливаются мощностью до 500 кВт с явновыраженными полюсами, а мощностью свыше 500 кВт с неявновыраженными полюсами.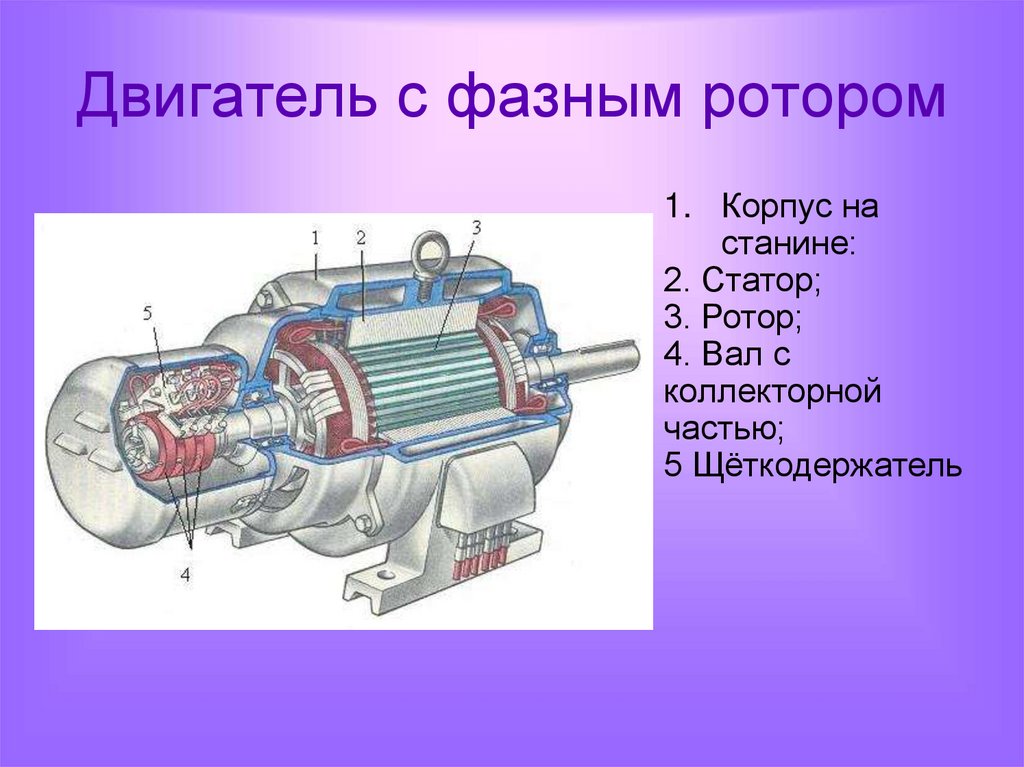 Вообще у синхронного двигателя конструкция ротора определяется скоростью вращения.
Вообще у синхронного двигателя конструкция ротора определяется скоростью вращения.
Асинхронные машины и машины постоянного тока по области применения делятся на крановые, шахтные (взрывобезопасные), общепромышленного применения, тяговые для привода транспортных средств и т.д.
Основы двигателей переменного тока и их применение
Двумя основными типами двигателей переменного тока являются асинхронные двигатели и синхронные двигатели. Асинхронный двигатель (или асинхронный двигатель) всегда зависит от небольшой разницы в скорости между вращающимся магнитным полем статора. Скорость вала ротора называется скольжением, чтобы индуцировать ток ротора в обмотке переменного тока ротора. В результате асинхронный двигатель не может создавать крутящий момент вблизи синхронной скорости, когда индукция (или скольжение) недоступна.
Синхронный двигатель, напротив, не зависит от индукции скольжения. В нем используются постоянные магниты, выступающие магнитные полюса (обычно сделанные из стальных пластин и называемые явно выраженными полюсами) или обмотка ротора с независимым возбуждением. Синхронный двигатель развивает свой номинальный крутящий момент точно на синхронной скорости.
Синхронный двигатель развивает свой номинальный крутящий момент точно на синхронной скорости.
Общая классификация двигателей. Двумя основными классификациями двигателей переменного тока являются синхронные и асинхронные (также называемые индукционными). (Изображение: Monolithic Power Systems)
Асинхронные двигатели
Наиболее распространенные однофазные двигатели переменного тока используют короткозамкнутый ротор, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока. Двигатель получил свое название от формы «обмоток» его ротора — кольца на обоих концах ротора с стержнями, соединяющими кольца по всей длине ротора. Обычно это литой алюминий или медь, залитая между металлическими пластинами ротора, и обычно видны только торцевые кольца. Большая часть тока ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Для стержней и торцевых колец типичны очень низкие напряжения при очень высоких токах; В высокоэффективных двигателях часто используется литая медь для уменьшения сопротивления ротора.
Простые индукционные машины напрямую подключаются к сети. Типичная характеристика скорости вращения при постоянной частоте статора и напряжении на клеммах показана на рисунке ниже. Синхронная скорость соответствует скорости вращения магнитного поля статора. Машина не создает крутящего момента на синхронной скорости, потому что в обмотках ротора не индуцируется ток. Если ротор вращается с меньшей скоростью, чем поле статора, машина работает в моторном режиме. В противном случае машина работает в режиме генератора. Максимальный крутящий момент, который может быть получен на валу двигателя, называется крутящим моментом. Номинальный крутящий момент определяется как половина крутящего момента на отрыв. Эти машины обычно работают в линейной области между положительным и отрицательным номинальным крутящим моментом, отмеченной зеленой линией на рисунке ниже.
Зависимость между крутящим моментом, скоростью вращения ротора и скольжением в простой асинхронной машине. (Изображение: Infineon Technologies)
Альтернативная конструкция, называемая фазным ротором, используется, когда требуется переменная скорость. В этом случае ротор имеет такое же количество полюсов, как и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки соединяют токосъемные кольца с контроллером, таким как переменный резистор, который позволяет изменять коэффициент скольжения двигателя. В некоторых мощных приводах с фазным ротором с регулируемой скоростью энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор. При двунаправленном управлении мощностью ротор с обмоткой становится активным участником процесса преобразования энергии, при этом конфигурация с двойным питанием от ротора с обмоткой обеспечивает удвоенную плотность мощности.
В этом случае ротор имеет такое же количество полюсов, как и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки соединяют токосъемные кольца с контроллером, таким как переменный резистор, который позволяет изменять коэффициент скольжения двигателя. В некоторых мощных приводах с фазным ротором с регулируемой скоростью энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор. При двунаправленном управлении мощностью ротор с обмоткой становится активным участником процесса преобразования энергии, при этом конфигурация с двойным питанием от ротора с обмоткой обеспечивает удвоенную плотность мощности.
По сравнению с роторами с короткозамкнутым ротором двигатели с фазным ротором дороже и требуют обслуживания контактных колец и щеток. Они все еще были стандартной формой для управления переменной скоростью до появления компактных электронных устройств. Твердотельные инверторы с частотно-регулируемым приводом теперь могут использоваться для управления скоростью, а двигатели с фазным ротором становятся все менее распространенными.
Асинхронные двигатели с большим фазным ротором (WRIM) — это хорошо зарекомендовавшая себя технология для промышленного применения. В цементной и горнодобывающей промышленности WRIM высокой мощности используются на крупных мельницах, где они имеют преимущество контролируемых пусковых характеристик и возможности регулировки скорости. Эти двигатели также используются на больших насосах в сфере водоснабжения и очистки сточных вод.
WRIM имеет трехфазный статор, который обычно подключается непосредственно к системе питания. Ротор имеет трехфазную обмотку с тремя выводами, подключенными к отдельным токосъемным кольцам, которые традиционно подключались к реостату или блоку резисторов. Реостат использовался для запуска и мог быть отключен, как только двигатель набрал скорость. Изменяя сопротивление ротора с помощью реостата, можно изменить скорость двигателя. Твердотельные накопители все чаще заменяют реостаты для управления двигателем в этих приложениях.
Синхронные двигатели
Существует несколько вариантов конструкции синхронных двигателей, включая синусоидальные, реактивные, шаговые и гистерезисные. Общим знаменателем является то, что вращение вала синхронизировано с частотой питающего тока; период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, вращающееся в такт колебаниям линейного тока. Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и обеспечивает второе синхронизированное вращающееся магнитное поле двигателя переменного тока. Асинхронный двигатель называется двигателем с двойным питанием, если он оснащен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Общим знаменателем является то, что вращение вала синхронизировано с частотой питающего тока; период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, вращающееся в такт колебаниям линейного тока. Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и обеспечивает второе синхронизированное вращающееся магнитное поле двигателя переменного тока. Асинхронный двигатель называется двигателем с двойным питанием, если он оснащен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Небольшие синусоидальные синхронные двигатели обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время. В более мощных промышленных установках синхронный двигатель выполняет две важные функции: Это высокоэффективное средство преобразования энергии переменного тока в работу.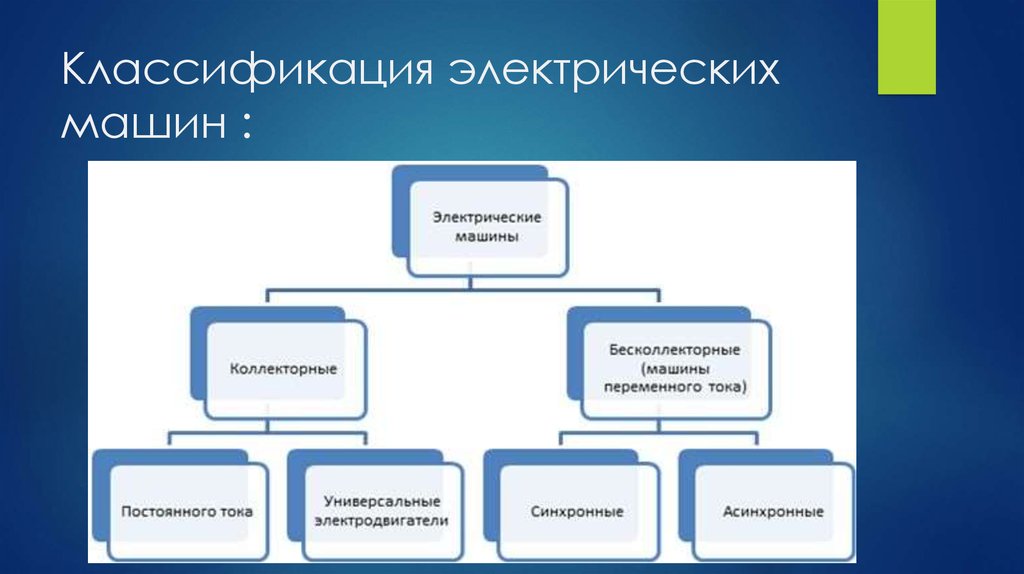 И он может работать с опережающим или единичным коэффициентом мощности и, таким образом, обеспечивать коррекцию коэффициента мощности.
И он может работать с опережающим или единичным коэффициентом мощности и, таким образом, обеспечивать коррекцию коэффициента мощности.
Реактивный двигатель представляет собой тип электродвигателя, который индуцирует непостоянные магнитные полюса на ферромагнитном роторе. Ротор не имеет обмоток. Он генерирует крутящий момент за счет магнитного сопротивления. Подтипы реактивных двигателей включают синхронные, переменные, переключаемые и переменные шаговые. Реактивные двигатели могут обеспечивать высокую удельную мощность при низкой стоимости, что делает их привлекательными для многих приложений. К недостаткам относятся высокая пульсация крутящего момента (разница между максимальным и минимальным крутящим моментом за один оборот) при работе на низкой скорости и шум из-за пульсаций крутящего момента. Импульсные реактивные двигатели могут использоваться как очень большие шаговые двигатели с уменьшенным числом полюсов и, как правило, коммутируются по замкнутому контуру. Обычные шаговые двигатели представляют собой разновидность бесщеточных двигателей постоянного тока (BLDC).
Гистерезисные двигатели имеют сплошной гладкий цилиндрический ротор, отлитый из магнито-твердой кобальтовой стали с высокой коэрцитивной силой. Этот материал имеет широкую петлю гистерезиса (высокую коэрцитивную силу), что означает, что после намагничивания в заданном направлении требуется большое обратное магнитное поле для изменения намагниченности. Вращающееся поле статора заставляет каждый небольшой объем ротора испытывать реверсивное магнитное поле. Из-за гистерезиса фаза намагниченности отстает от фазы приложенного поля. Результатом этого является то, что ось магнитного поля, индуцированного в роторе, отстает от оси поля статора на постоянный угол δ, создавая крутящий момент, когда ротор пытается «догнать» поле статора.
Преимущество гистерезисного двигателя заключается в том, что, поскольку угол запаздывания δ не зависит от скорости, он развивает постоянный крутящий момент от запуска до синхронной скорости. Следовательно, он самозапускающийся и для его запуска не требуется индукционная обмотка.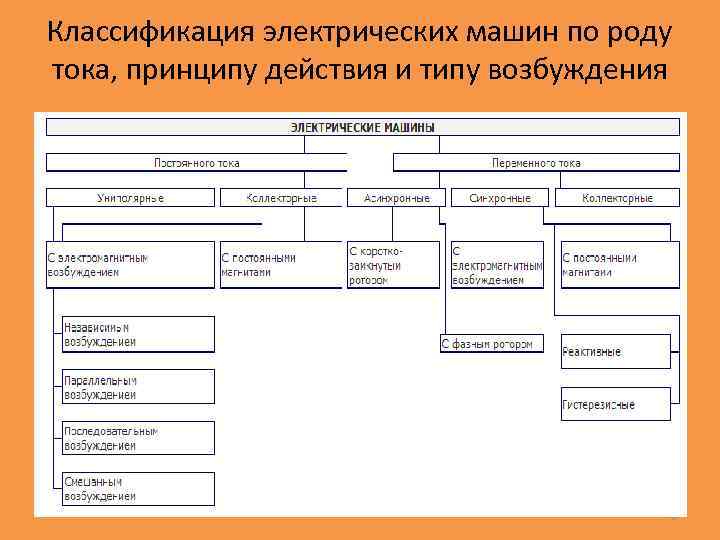 Двигатели с гистерезисом производятся с номинальной мощностью долей лошадиных сил, в основном в качестве серводвигателей и синхронизирующих двигателей. Более дорогие, чем реактивные, гистерезисные двигатели используются там, где требуется точная постоянная скорость.
Двигатели с гистерезисом производятся с номинальной мощностью долей лошадиных сил, в основном в качестве серводвигателей и синхронизирующих двигателей. Более дорогие, чем реактивные, гистерезисные двигатели используются там, где требуется точная постоянная скорость.
Синхронные двигатели с постоянными магнитами (PMSM) обеспечивают более высокий КПД по сравнению с асинхронными двигателями переменного тока и двигателями BLDC. (Изображение: Эмбител)
Синхронный двигатель с постоянными магнитами (СДПМ) использует постоянные магниты, встроенные в стальной ротор, для создания постоянного магнитного поля. Статор содержит обмотки, подключенные к источнику переменного тока для создания вращающегося магнитного поля (асинхронный двигатель). При синхронной скорости полюса ротора замыкаются на вращающемся магнитном поле. Синхронные двигатели с постоянными магнитами аналогичны двигателям BLDC.
PMSM в сравнении с производительностью BLDC
Двигатель PMSM можно рассматривать как аналог двигателя переменного тока BLDC. Как и BLDC, PMSM имеет ротор с постоянными магнитами и статор с обмоткой. Работа двигателя PMSM также очень похожа на двигатель BLDC. Однако разница заключается в форме волны обратной ЭДС, которая носит синусоидальный характер. Это связано с тем, что катушки намотаны на статоре синусоидально.
Как и BLDC, PMSM имеет ротор с постоянными магнитами и статор с обмоткой. Работа двигателя PMSM также очень похожа на двигатель BLDC. Однако разница заключается в форме волны обратной ЭДС, которая носит синусоидальный характер. Это связано с тем, что катушки намотаны на статоре синусоидально.
Двигатель PMSM генерирует синусоидальную противоЭДС, в то время как BLDC генерирует трапецеидальную волну противоЭДС. (Изображение: Texas Instruments)
PMSM требует питания переменного тока (синусоидального характера) для достижения наилучшей производительности. Этот тип управляющего тока также снижает шум, создаваемый двигателем. Преимущества двигателей PMSM:
- Более высокая эффективность, чем у бесщеточных двигателей постоянного тока
- Отсутствие пульсаций момента при коммутации двигателя
- Более высокий крутящий момент и лучшая производительность
- Более надежный и менее шумный, чем другие асинхронные двигатели
- Высокая производительность как при высокой, так и при низкой скорости работы
- Низкая инерция ротора облегчает управление
- Эффективное рассеивание тепла
- Уменьшенный размер двигателя
Стандарты эффективности двигателей переменного тока
Международный стандарт IEC/EN 60034-30 делит эффективность двигателей на пять классов: от IE1 до IE5.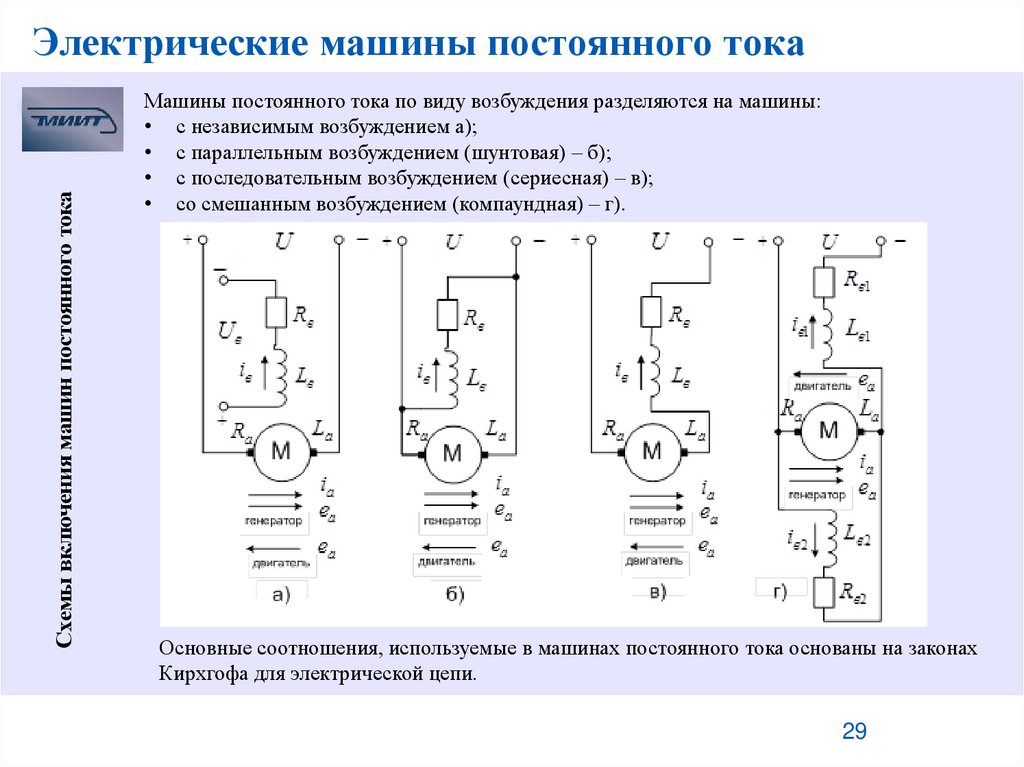 Национальная ассоциация производителей электрооборудования (NEMA) имеет соответствующую рейтинговую шкалу от «стандартной эффективности» до «ультра-премиальной» эффективности. Использование электронных приводов необходимо для соответствия более высоким стандартам эффективности. Простые асинхронные двигатели переменного тока с электронными приводами могут соответствовать требованиям IE3 и IE4, тогда как СДПМ необходимы для соответствия уровням эффективности IE5.
Национальная ассоциация производителей электрооборудования (NEMA) имеет соответствующую рейтинговую шкалу от «стандартной эффективности» до «ультра-премиальной» эффективности. Использование электронных приводов необходимо для соответствия более высоким стандартам эффективности. Простые асинхронные двигатели переменного тока с электронными приводами могут соответствовать требованиям IE3 и IE4, тогда как СДПМ необходимы для соответствия уровням эффективности IE5.
Классы эффективности двигателей в соответствии с IEC/EN 60034-30 (от IE1 до IE5) и соответствующие рейтинги NEMA (от стандартной эффективности до сверхвысокой эффективности). (Изображение: Центр энергетических исследований Нидерландов)
Разница между классами эффективности IE больше для двигателей меньшего размера. Например, для двигателя мощностью 1 кВт увеличение эффективности между IE1 и IE3 составляет около 13%. Для двигателя мощностью 10 кВт повышение эффективности между IE1 и IE3 составляет всего около 6%
Как отмечалось выше, электронные приводы необходимы для соответствия более высоким стандартам эффективности. Приводы и контроллеры двигателей переменного тока будут в центре внимания четвертого и последнего часто задаваемых вопросов в этой серии.
Приводы и контроллеры двигателей переменного тока будут в центре внимания четвертого и последнего часто задаваемых вопросов в этой серии.
Справочные материалы
Бесколлекторный двигатель постоянного тока и СДПМ, Embitel
Руководство по двигателю, Infineon Technologies
Типы двигателей переменного тока. Классификация и использование двигателей переменного тока
Введение
Все мы знаем, что без электричества мы не можем выполнять свою работу. Если мы посмотрим на мир, в котором мы живем, основное развитие технологий и цивилизации произошло только после появления электричества и электрических устройств. Можем ли мы представить себе жизнь без кондиционеров/потолочных вентиляторов, освещения, компьютеров и устройств связи и многого другого.
Можем ли мы представить себе жизнь без кондиционеров/потолочных вентиляторов, освещения, компьютеров и устройств связи и многого другого.
Итак, совершенно очевидно, что электричество и электрооборудование играют жизненно важную роль в каждом сантиметре нашей жизни. Одним из таких устройств, которое совершило гигантский скачок в развитии человечества как в бытовом, так и в промышленном секторах, является «Мотор». Использование двигателей переменного тока гораздо более распространено, чем двигателей постоянного тока, по нескольким практическим причинам, о которых мы узнаем позже.
Двигатели переменного тока играют очень важную роль в повседневной жизни, начиная от перекачки воды в верхний резервуар и заканчивая маневренной рукой современного робота. Основным фактором, который привел к принятию и широкому использованию в различных областях, является его гибкость и огромное разнообразие, которые могут быть согласованы практически с любым спросом. Чтобы знать, какие существуют различные типы двигателей переменного тока, чтобы идеально соответствовать спросу, очень важно знать о различных классификациях двигателей переменного тока.
Типы двигателей переменного тока
- Классификация на основе Принцип работы :
(a) Синхронные двигатели.
1. Обычный
2. Супер
(b) Асинхронные двигатели.
1. Асинхронные двигатели:
(a) Беличья клетка
(b) Контактное кольцо (внешнее сопротивление).
- Коллекторные двигатели:
(a) Серия
(b) Компенсировано
(c) Шунт
(D) Отталкивание
(E) Индукция отталкивания
(F) Индукция
- . По типу тока:
1. Однофазный
2. Трехфазный
- Классификация на основе Скорость работы:
1.0002
2. Переменная скорость.
3. Регулируемая скорость.
- Классификация на основе Структурные особенности:
1. Open
Open
2. Закрытый
3. Полуполизованный
4. Вентиляция
5. Введите введите
6. Riveted Crame-
5. Глаза и т. Д.
Обзор A.C.Motors
1. Синхронные двигатели и его ИТ 0124 : У этих двигателей ротор (который подключен к нагрузке) вращается с той же скоростью, что и скорость вращения тока статора. Другими словами, мы можем сказать, что эти двигатели не имеют скольжения по отношению к току статора. Иногда они используются не для управления нагрузкой, а вместо этого действуют как «синхронный конденсатор» для улучшения коэффициента мощности местной сети, к которой он подключен. Такие двигатели используются даже в высокоточных устройствах позиционирования, таких как современные роботы. Они также могут работать как шаговые двигатели.
2. Асинхронные двигатели и их применение: Самый распространенный тип двигателя, который используется в повседневной жизни от перекачивания воды в верхний резервуар до питающих насосов котлов электростанции, этот тип двигателей является правилом. Эти двигатели очень универсальны в использовании и почти во всем соответствуют требованиям нагрузки. Наиболее широко используемые
Эти двигатели очень универсальны в использовании и почти во всем соответствуют требованиям нагрузки. Наиболее широко используемые
Асинхронные двигатели очень важны для многих отраслей промышленности благодаря своей несущей способности и гибкости. Эти двигатели, в отличие от синхронных двигателей, скользят по сравнению с полем тока статора. Обычно они используются для различных типов насосов, компрессоров и действуют как первичные двигатели для многих механизмов.
3. Однофазные и трехфазные двигатели и их применение: В зависимости от источника питания двигатели переменного тока могут использоваться в двух формах. Однофазные двигатели, как правило, находят свое применение в маломощных бытовых приборах, таких как потолочные вентиляторы, миксеры, переносные электроинструменты и т. д. Трехфазные двигатели обычно используются в устройствах с высокой мощностью, таких как силовые приводы для компрессоров, гидравлических насосов, кондиционеров. компрессоры, ирригационные насосы и многое другое.
компрессоры, ирригационные насосы и многое другое.
4. Двигатели с постоянной, переменной и регулируемой скоростью: Как уже было сказано, двигатели переменного тока очень гибкие во многих отношениях, включая регулирование скорости. Существуют двигатели, которые должны работать с постоянной скоростью для воздушных компрессоров. Некоторые насосы охлаждающей воды, приводимые в действие двигателями переменного тока, могут работать на двух или трех скоростях, просто переключая число используемых полюсов. При изменении количества полюсов изменяется и скорость. Они лучше всего подходят для насосов охлаждения морской водой в судовых машинных отделениях и на многих электростанциях. Скорость двигателей также может непрерывно изменяться с помощью некоторых электронных устройств, поэтому это может подходить для определенных приложений, таких как грузовой насос корабля, скорость нагнетания которого должна быть снижена в соответствии с требованиями терминалов.