Схемы обмоток фазных роторов | Обмотчик электрических машин
Страница 35 из 84
ГЛАВА VIII
СТЕРЖНЕВЫЕ ОБМОТКИ РОТОРОВ АСИНХРОННЫХ ДВИГАТЕЛЕМ
§ 35. СХЕМЫ ОБМОТОК ФАЗНЫХ РОТОРОВ
Обмотки фазных роторов асинхронных двигателей мощностью более 70—80 кВт, как правило, выполняют стержневыми.
В фазных роторах современных асинхронных двигателей почти всегда применяют двухслойные волновые обмотки, так как в двухслойных обмотках лобовые части изгибаются меньше, чем в однослойных, а в волновых обмотках меньше межгрупповых соединений, чем в петлевых той же полюсности.
Закономерность соединения схемы стержневых волновых обмоток рассмотрим на конкретном примере. Составим схему волновой стержневой обмотки трехфазного ротора с Z2= 24 и 2р= 4. На рис. 101, а показаны 24 пары линии пазов, в которых располагаются стержни верхнего (сплошные линии) и нижнего (пунктирные линии) слоев обмотки. Разметим пазы так же, как в схемах двухслойных обмоток статора, т. е. распределим все пазы по полюсным делениям и обозначим фазы обмотки. Полюсное деление ротора содержит
е. распределим все пазы по полюсным делениям и обозначим фазы обмотки. Полюсное деление ротора содержит
Z2/(2p) = 24/4 = 6 пазовых делений.
Рис. 101. Построение схемы стержневой волновой обмотки фазного ротора:
а —распределение пазов по фазам, б — соединение стержней первой половины фазы, в — последовательность соединения стержней
Число пазов на полюс и фазу q2 = Z2/2pm = 24/(4-3) = 2. Для всех стержней фазы А отметим стрелками направление мгновенных значений токов. Оно меняется при переходе от одного полюсного деления к другому. Построение схемы обмотки начнем, приняв за начало фазы А верхний стержень, лежащий в первом пазу (рис. 101,6). Одновременно с вычерчиванием схемы обмотки будем заполнять таблицу соединений с указанием номеров пазов и последовательности шагов, как показано на рис. 101, в. Обмотку выполняют с диаметральным шагом (для нашей схемы у=τ2=6 пазовым делением). Обмотка двухслойная, поэтому верхний стержень, лежащий в первом пазу, должен быть соединен с нижним стержнем, лежащим в (1 + у) = (1 + 6) = 7 пазу. Следующим шагом нижний стержень 7-го паза соединяется с верхним стержнем, лежащим в (7+6) = 13 пазу. Проделав таким образом 2р — 1 = 4 — 1 = 3 шага из 1в в 7н, из 7н в 13 в, из 13в в 19н, убедимся, что при следующем таком же шаге стержень, лежащий в нижнем слое 19-го паза, должен быть соединен со стержнем, взятым за начало фазы, лежащим в верхнем слое 1-го паза, т. е. обмотка замкнется сама на себя. Чтобы этого не произошло, следующий шаг изменяют на одно зубцовое деление — укорачивают или удлиняют, т. е. делают его равным (у + 1) или (у — 1). Чаще применяют укороченный шаг, так как он приводит к некоторой экономии меди.
Обмотка двухслойная, поэтому верхний стержень, лежащий в первом пазу, должен быть соединен с нижним стержнем, лежащим в (1 + у) = (1 + 6) = 7 пазу. Следующим шагом нижний стержень 7-го паза соединяется с верхним стержнем, лежащим в (7+6) = 13 пазу. Проделав таким образом 2р — 1 = 4 — 1 = 3 шага из 1в в 7н, из 7н в 13 в, из 13в в 19н, убедимся, что при следующем таком же шаге стержень, лежащий в нижнем слое 19-го паза, должен быть соединен со стержнем, взятым за начало фазы, лежащим в верхнем слое 1-го паза, т. е. обмотка замкнется сама на себя. Чтобы этого не произошло, следующий шаг изменяют на одно зубцовое деление — укорачивают или удлиняют, т. е. делают его равным (у + 1) или (у — 1). Чаще применяют укороченный шаг, так как он приводит к некоторой экономии меди.
Первый обход обмотки по всей окружности ротора завершается укороченным (или удлиненным) шагом, после чего соединение продолжают в той же последовательности с диаметральными шагами, изменяя их в конце каждого из обходов. После 2 таких обходов (в нашем случае после двух обходов, так как q2 = 2) укорачивать последний шаг уже нельзя, так как это приведет к соединению обмотки фазы А со стержнями соседней фазы (18н + 6 — 1 = 23в — принадлежит фазе В). К этому моменту уже соединена половина всех стержней фазы А ив каждом пазу этой фазы находится только по одному стержню: верхнему или нижнему (см. рис. 101, б). Для заполнения оставшихся после первых q2 обходов половин пазов фазы последний стержень, на котором закончился обход (на нашей схеме — нижний стержень 18-го паза), соединяют перемычкой со стержнем, занимающим такое же положение в пазу на расстоянии шага в направлении обхода. В нашем примере нижний стержень 18-го паза соединяется с нижним стержнем 24-го (18 + 6) паза. Дальнейшие соединения продолжают в той же последовательности, но в направлении, обратном принятому первоначально. После обходов в обратном направлении построение схемы одной фазы обмотки заканчивается.
После 2 таких обходов (в нашем случае после двух обходов, так как q2 = 2) укорачивать последний шаг уже нельзя, так как это приведет к соединению обмотки фазы А со стержнями соседней фазы (18н + 6 — 1 = 23в — принадлежит фазе В). К этому моменту уже соединена половина всех стержней фазы А ив каждом пазу этой фазы находится только по одному стержню: верхнему или нижнему (см. рис. 101, б). Для заполнения оставшихся после первых q2 обходов половин пазов фазы последний стержень, на котором закончился обход (на нашей схеме — нижний стержень 18-го паза), соединяют перемычкой со стержнем, занимающим такое же положение в пазу на расстоянии шага в направлении обхода. В нашем примере нижний стержень 18-го паза соединяется с нижним стержнем 24-го (18 + 6) паза. Дальнейшие соединения продолжают в той же последовательности, но в направлении, обратном принятому первоначально. После обходов в обратном направлении построение схемы одной фазы обмотки заканчивается. Схема соединения фазы А изображена на рис. 102, а всех фаз обмотки ротора — на рис. 103. По схеме рис. 103 можно проследить основные закономерности, характерные для стержневых волновых обмоток роторов. Начала фаз располагаются в 1, 9 и 17-м пазах, т. е. через 2q2p = 2x2x2 = 8 зубцовых делений. Такое расстояние между началами фаз обеспечивает и электрическую и геометрическую симметрии обмотки.
Схема соединения фазы А изображена на рис. 102, а всех фаз обмотки ротора — на рис. 103. По схеме рис. 103 можно проследить основные закономерности, характерные для стержневых волновых обмоток роторов. Начала фаз располагаются в 1, 9 и 17-м пазах, т. е. через 2q2p = 2x2x2 = 8 зубцовых делений. Такое расстояние между началами фаз обеспечивает и электрическую и геометрическую симметрии обмотки.
Рис. 102. Схема соединения стержней одной фазы волновой обмотки ротора (а) и последовательность их соединения (б)
Электрический угол между началами фаз кратен 120° (он равен 2р-60° = 2х2х60 = 240 эл. град), а геометрический угол равен 120°, т. е. начала фаз расположены симметрично по окружности ротора.
Каждая фаза обмотки имеет только одну перемычку между катушечными группами независимо от числа полюсов машины. Напомним, что в петлевых обмотках таких перемычек будет (2р — 1) в каждой фазе (см., например, рис. 28). В этом ясно видно преимущество волновых обмоток, особенно для многополюсных машин. Так, например, в каждой фазе петлевой обмотки с 2р = 12 будет по 11 перемычек между катушечными группами, а в фазе стержневой волновой — только одна.
Так, например, в каждой фазе петлевой обмотки с 2р = 12 будет по 11 перемычек между катушечными группами, а в фазе стержневой волновой — только одна.
При симметрично выбранных началах фаз обмотки также симметрично по окружности ротора располагаются концы фаз (Р4 — в 7-м, Р5 — в 15-м, Р6 — в 23-м пазах) и перемычки между катушечными группами, что облегчает балансировку ротора после укладки обмотки. В большинстве случаев обмотка ротора соединяется в звезду. Начала фаз обмотки ротора (Р1, Р2, Р3) соединяются с контактными кольцами, а концы фаз (Р4, Р5, Р6) — между собой кольцевой перемычкой.
Рис. 103. Схема стержневой волновой обмотки ротора с укороченными переходами с Z= 24, 2р=4
Как мы уже знаем, обмотка может быть выполнена и с удлиненными шагами в конце каждого обхода. Ее схема строится так же, как и схема на рис. 103, но в конце обхода выполняется удлиненный шаг, равный (у+1). Из-за увеличения шага несколько удлиняются лобовые части стержней, соединенных с перемычками, а у выводных стержней возникают дополнительные перекрещивания в лобовых частях.
Иногда стержневую волновую обмотку ротора делают с различными переходными шагами: при обходе первой ветви до перемычки с удлиненными, а после перемычки — с укороченными.
Рис. 104. Схема фазы стержневой волновой обмотки ротора с переходным стержнем с Z=36, 2р= 4 (а) и последовательность соединений стержней (б)
Встречаются также схемы обмоток фазных роторов, выполненные без перемычек (рис. 104). В таких обмотках на месте последнего при прямом обходе стержня, который в обычных схемах соединяется с перемычкой, устанавливают изогнутый переходный стержень (паз 26 на рис. 104). Половина этого стержня 1 (рис. 105) располагается в нижней, а другая половина — в верхней части паза. Обе лобовые части переходного стержня отгибаются в одну и ту же сторону, и направление обхода соединения обмоток после переходного стержня меняется на обратное, так же как и после перемычки. В таких схемах выводные концы последних стержней всех фаз располагаются на противоположной от начал фаз стороне ротора.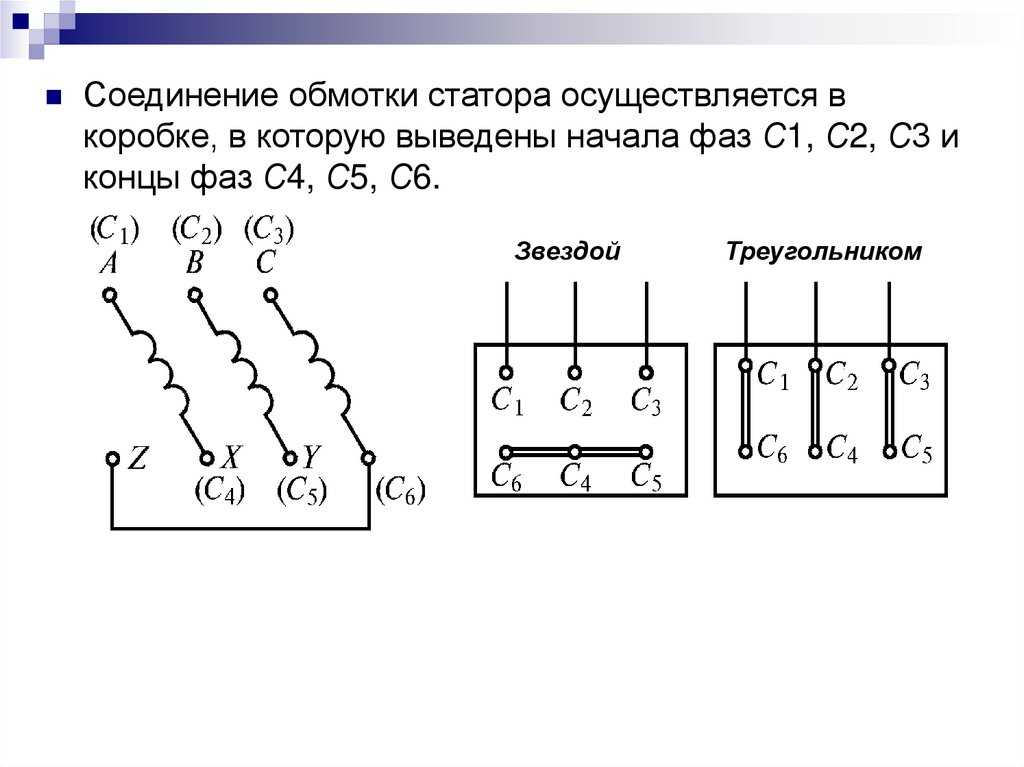 Соединение стержней в них более удобно, чем в схемах с перемычками, однако обмоточные работы усложняются в связи с необходимостью добавочного закрепления переходных стержней. Свободные части пазов, в которых расположены переходные стержни, заполняются либо текстолитовыми прокладками 2, либо отрезками изолированной медной шины того же размера, что и стержни обмотки, как показано на рис. 105.
Соединение стержней в них более удобно, чем в схемах с перемычками, однако обмоточные работы усложняются в связи с необходимостью добавочного закрепления переходных стержней. Свободные части пазов, в которых расположены переходные стержни, заполняются либо текстолитовыми прокладками 2, либо отрезками изолированной медной шины того же размера, что и стержни обмотки, как показано на рис. 105.
Стержневую волновую обмотку делают с одной или реже с двумя параллельными ветвями. Выполнение большего числа параллельных ветвей из-за дополнительных соединений в лобовых частях технологически трудно и в практике применяется редко. Для получения двух параллельных ветвей перемычку между половинами фаз убирают и каждую половину обмотки соединяют с начальными и конечными выводами фаз (рис. 106).
Рис. 105. Переходной стержень в пазу ротора
Рис. 106. Соединение фаз обмотки ротора в две параллельные ветви
Чтобы начала фаз в обмотке ротора располагались по окружности ротора симметрично, между ними должно заключаться 2q2p пазов. Такое симметричное расположение возможно во всех роторах, число полюсов которых не кратно трем. В двигателях с числом, кратным трем (2р=6, 12 и т. д.), симметричное положение выводов приходится нарушать, так как через 2q2p пазов в них располагаются стержни одной и той же фазы. Начала фаз в обмотках роторов таких машин выбирают через 2q2(p — 1) пазовых делений.
Такое симметричное расположение возможно во всех роторах, число полюсов которых не кратно трем. В двигателях с числом, кратным трем (2р=6, 12 и т. д.), симметричное положение выводов приходится нарушать, так как через 2q2p пазов в них располагаются стержни одной и той же фазы. Начала фаз в обмотках роторов таких машин выбирают через 2q2(p — 1) пазовых делений.
- Назад
- Вперёд
1) В чем особенность устройства асинхронных двигателей с фазным ротором?
Асинхронный
двигатель с фазным ротором – это
двигатель, который можно регулировать
с помощью добавления в цепь ротора
добавочных сопротивлений.
Обычно такие двигатели применяются при
пуске с нагрузкой на валу, так как
увеличение сопротивления в цепи ротора,
позволяет повысить пусковой момент и
уменьшить пусковые токи.
Другая
разновидность трехфазных асинхронных
двигателей — двигатели с фазным ротором
— конструктивно отличается от рассмотренного
двигателя главным образом устройством
ротора (рис.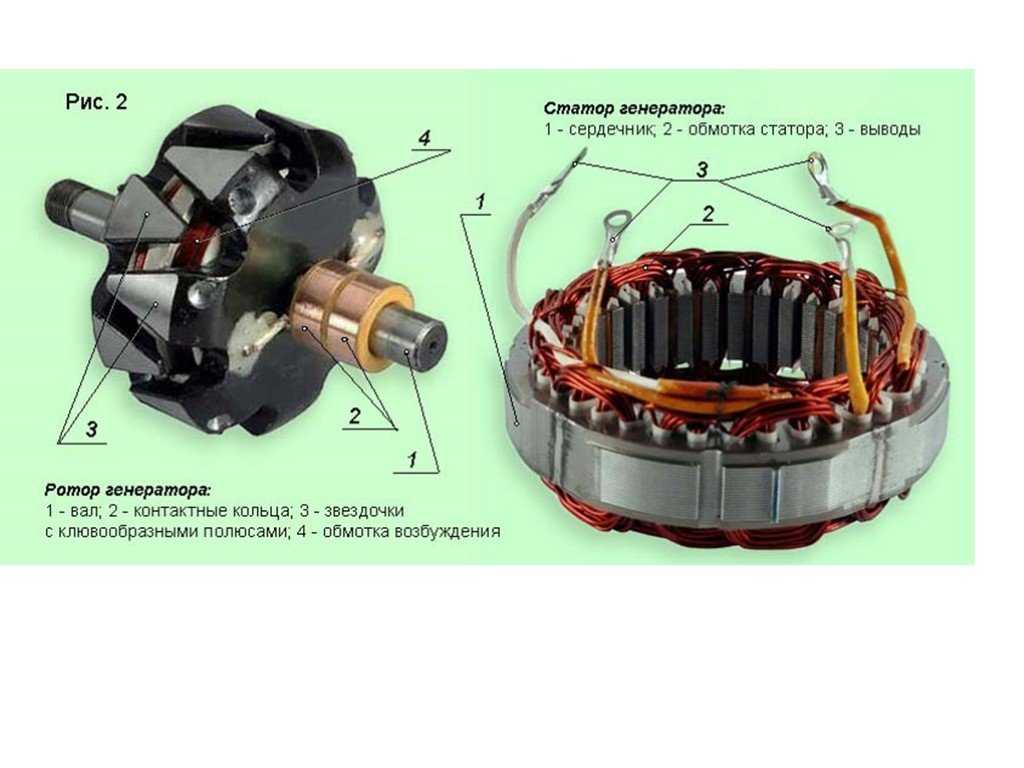 5). Статор этого двигателя
5). Статор этого двигателя
также состоит из корпуса 3 и сердечника
4 с трехфазной обмоткой. У него имеются
подшипниковые щиты 2 и 6 с подшипниками
качения 1 и 7. К корпусу 3 прикреплены
лапы 10 и коробка выводов 9. Однако ротор
имеет более сложную конструкцию. На
валу 8 закреплен шихтованный сердечник
5с трехфазной обмоткой, выполненной
аналогично обмотке статора. Эту обмотку
соединяют звездой, а ее концы присоединяют
к трем контактным кольцам 11, расположенным
на валу и изолированным друг от друга
и от вала. Для осуществления электрического
контакта с обмоткой вращающегося ротора
на каждое контактное кольцо 1 (рис.6)
накладывают обычно две щетки 2,
располагаемые в щеткодержателях 3.
Каждый щеткодержатель снабжен пружинами,
обеспечивающими прижатие щеток к
контактному кольцу с определенным
усилием.
Асинхронные
двигатели с фазным ротором имеют более
сложную конструкцию и менее надежны,
но они обладают лучшими регулировочными
и пусковыми свойствами, чем двигатели
с короткозамкнутым ротором. Принципиальная
Принципиальная
схема включения в трехфазную сеть
асинхронного двигателя с фазным ротором
показана на рис.4, б. Обмотка ротора этого
двигателя соединена с пусковым
реостатомПР,
создающим в цепи ротора добавочное
сопротивление Rдоб.
Рис.5.
Устройство трехфазного асинхронного
двигателя с фазным ротором:
1,
7 — подшипники; 2, 6 – подшипниковые щиты;
3 — корпус; 4 – сердечник статора с
обмоткой; 5 – сердечник ротора; 8 — вал;
9 – коробка выводов; 10 — лапы; 11 – контактные
кольца
Рис.6
Расположение щеткодержателей
Конструктивно
фазный ротор представляет из себя
трехфазную обмотку (аналогичную обмотки
статора) уложенную в пазы сердечника
фазного ротора. Концы фаз такой обмотки
ротора обычно соединяются в «звезду»,
а начала подключают к контактным кольцам,
изолированным друг от друга и от вала.
Через щетки к контактным кольцам обычно
присоединяется трехфазный пусковой
или регулировочный реостат. Асинхронные
Асинхронные
двигатели с фазным ротором имеют более
сложную конструкцию, чем у двигателей
с короткозамкнутым ротором, однако
обладают лучшими пусковыми и регулировочными
свойствами.
3)
Начертить графики механических
характеристик при пуске АД при наличии
в цепи ротора пускового реостата rд=var.
Пояснить пуск АД в данном случае.
Наличие
контактных колец у двигателей с фазным
ротором позволяет подключить к
обмотке ротора пусковой реостат (ПР).
При этом активное сопротивление цепи
ротора увеличивается до значения
R2 =
r2‘
+ rд‘,
где rд‘
— электрическое сопротивление пускового
реостата,
Рис.
15.1. Зависимость пускового момента от
активного
сопротивления цепи ротора приведенное
к обмотке статора.
Влияние
возросшего значения активного
сопротивления на пусковой момент
двигателя Мп следует
из
.
Это влияние графически показано на рис.
15. 1, из которого видно, что если при
1, из которого видно, что если при
отсутствии ПР, т. е. при активном
сопротивлении цепи ротора R2 =
r2,
пусковой момент Мп =
Мпо,
то при введении в цепь ротора добавочного
активного сопротивления rдоб ,
когда R/2 =
r2‘
+ rдоб‘
, пусковой момент возрастает и при R//2 =
r2‘
+ rдоб‘
= х1 +
х’2 достигает
наибольшего значения Мп.наиб.
При R/2 >
х1 +
х’2 пусковой
момент уменьшается.
Введение
добавочного активного сопротивления
увеличивает полное сопротивление
роторной цепи, в результате чего
уменьшается пусковой ток и увеличивается
роторной цепи, вследствие чего
увеличивается активная составляющая
тока ротора и, следовательно, пусковой
момент двигателя.
На
рис. 15.2, а показана схема включения ПР
в цепь фазного ротора. В процессе
пуска двигателя ступени ПР переключают
таким образом, чтобы ток ротора оставался
приблизительно неизменным, а среднее
значение пускового момента было близко
к наибольшему. На рис. 15.2, б представлен
На рис. 15.2, б представлен
график изменения пускового момента
асинхронного двигателя при четырех
ступенях пускового реостата. Так, в
начальный момент пуска (первая ступень
реостата) пусковой момент равен
Мп.maх. По
мере разгона двигателя его момент
уменьшается по кривой 1. Как
только значение момента уменьшится до
значения Мп.min рычаг
реостата переводят на вторую ступень
и сопротивление реостата
Рис.
15.2. Схема включения пускового реостата
(а) и построение графика пускового
момента (б) асинхронного двигателя с
фазным ротором
уменьшается.
Теперь зависимость М = f(s)
выражается кривой 2 и
пусковой момент двигателя вновь
достигает Мп.mах. Затем
ПР переключают на третью и на четвертую
ступени (кривые 3 и 4).После того как
электромагнитный момент двигателя
уменьшится до значения, равного значению
противодействующего момента на валу
двигателя, частота вращения ротора
достигнет установившегося значения и
процесс пуска двигателя будет закончен.
Таким образом, в течение всего процесса
пуска значение пускового момента
остается приблизительно постоянным,
равным Мп.ср.
Следует иметь в виду, что при слишком
быстром переключении ступеней реостата
пусковой ток может достигнуть недопустимо
больших значений.
Рис.
262. Механические характеристики
асинхронного двигателя: а — естественная;
б — при включении пускового реостата
При
включении в цепь обмоток ротора пускового
реостата получаем семейство механических
характеристик (рис. 262,б). Характеристика
1 при работе двигателя без пускового
реостата называется естественной.
Характеристики 2, 3 и 4, получаемые при
подключении к обмотке ротора двигателя
реостата с сопротивлениями R1п (кривая
2), R2п (кривая
3) и R3п (кривая
4), называют реостатными механическими
характеристиками. При включении пускового
реостата механическая характеристика
становится более мягкой (более
крутопадающей), так как увеличивается
активное сопротивление цепи ротора
R2 и
возрастает sкp.
При этом уменьшается пусковой ток.
Пусковой момент Мп также
зависит от R2.
Можно так подобрать сопротивление
реостата, чтобы пусковой момент Мп был
равен наибольшему Мmax.
Что такое двигатель с фазным ротором и как он работает?
Электрические двигатели — машины, преобразующие электричество в механическую энергию — широко распространены в инженерном мире. Они являются краеугольным камнем инженерных достижений, таких как лифты, насосы и даже электромобили, благодаря способности использовать эффект электромагнитной индукции. Эти так называемые асинхронные двигатели используют переменный ток и электромагнетизм для создания вращательного движения и бывают разных конфигураций. Особое внимание в этой статье будет уделено асинхронному двигателю переменного тока особого типа, известному как двигатель с фазным ротором. Хотя эти двигатели используются только в особых сценариях, они имеют явное преимущество перед другими популярными вариантами (беличьей клеткой, синхронными двигателями и т. д.) благодаря своим уникальным характеристикам. Будут изучены устройство и работа этих двигателей, а также конкретные характеристики, которые делают их столь важными для приложений, где другие, более популярные асинхронные двигатели не могут быть реализованы.
д.) благодаря своим уникальным характеристикам. Будут изучены устройство и работа этих двигателей, а также конкретные характеристики, которые делают их столь важными для приложений, где другие, более популярные асинхронные двигатели не могут быть реализованы.
Что такое двигатели с фазным ротором?
Двигатели с фазным ротором представляют собой особый тип двигателей переменного тока и работают почти так же, как и другие асинхронные двигатели. Они состоят из двух основных компонентов: внешнего статора и внутреннего ротора, разделенных небольшим воздушным зазором. Статор, как правило, одинаков для всех асинхронных двигателей и состоит из металлических пластин, которые удерживают на месте обмотки из медного или алюминиевого провода. В статоре есть три отдельные катушки, на которые подается трехфазный переменный ток, что просто означает, что каждая из них питается от отдельного переменного тока. Это не всегда так: некоторые двигатели являются однофазными, но двигатели с фазным ротором, как правило, всегда трехфазные. Тем не менее, эти три фазы генерируют магнитное поле, которое смещается вместе с переменными токами. Это создает вращающееся магнитное поле (RMF), которое действует на ротор. В двигателях с фазным ротором ротор «обмотан» проводом, как и статор, причем их концевые концы соединены с 3 контактными кольцами на выходном валу. Эти контактные кольца прикреплены к щеткам и блокам резисторов переменной мощности, где операторы могут изменять скорость двигателя, изменяя сопротивление катушек ротора. Эти контактные кольца позволяют регулировать скорость и крутящий момент и являются отличительной чертой двигателей с фазным ротором (именно поэтому эти двигатели часто называют двигателями с контактными кольцами).
Тем не менее, эти три фазы генерируют магнитное поле, которое смещается вместе с переменными токами. Это создает вращающееся магнитное поле (RMF), которое действует на ротор. В двигателях с фазным ротором ротор «обмотан» проводом, как и статор, причем их концевые концы соединены с 3 контактными кольцами на выходном валу. Эти контактные кольца прикреплены к щеткам и блокам резисторов переменной мощности, где операторы могут изменять скорость двигателя, изменяя сопротивление катушек ротора. Эти контактные кольца позволяют регулировать скорость и крутящий момент и являются отличительной чертой двигателей с фазным ротором (именно поэтому эти двигатели часто называют двигателями с контактными кольцами).
Как работают двигатели с фазным ротором?
Мы рекомендуем прочитать нашу статью об асинхронных двигателях, чтобы понять основные законы, общие для всех асинхронных машин, но в этой статье мы кратко объясним науку, лежащую в основе работы двигателя с фазным ротором.
Эти двигатели классифицируются как асинхронные двигатели, в которых существует несоответствие (известное как «скольжение») между скоростью RMF статора (синхронная скорость) и выходной скоростью (номинальная скорость). При создании необходимого тока, напряжения и магнитной силы в обмотках ротора двигатель всегда будет испытывать проскальзывание между вращающимся полем и ротором. Не стесняйтесь посетить нашу статью о типах двигателей переменного тока, чтобы узнать больше.
При создании необходимого тока, напряжения и магнитной силы в обмотках ротора двигатель всегда будет испытывать проскальзывание между вращающимся полем и ротором. Не стесняйтесь посетить нашу статью о типах двигателей переменного тока, чтобы узнать больше.
Двигатели с фазным ротором отличаются тем, как их ротор взаимодействует со статором. Обмотки ротора подключены к вторичной цепи, содержащей токосъемные кольца, щетки и внешние резисторы, и питаются от отдельного трехфазного переменного тока. При пуске внешнее сопротивление этой вторичной цепи приводит к тому, что ток ротора снижает силу RMF статора (он протекает более «в фазе» с RMF статора). Это означает, что скорость вращения можно контролировать, изменяя сопротивление, когда двигатель достигает 100% скорости, что позволяет операторам выбирать пусковой момент и рабочие характеристики. Это приводит к плавному пуску, высокому начальному крутящему моменту, низкому начальному току и возможности регулировать скорость вращения, чего нельзя достичь в более простых конструкциях, таких как двигатели с короткозамкнутым ротором (более подробную информацию об этой конструкции можно найти в нашей статье). на двигателях с короткозамкнутым ротором).
на двигателях с короткозамкнутым ротором).
Технические характеристики двигателя с фазным ротором
Спецификации для двигателя с фазным ротором включают в себя понимание спецификаций для всех асинхронных двигателей, которые можно просмотреть в нашей статье, посвященной асинхронным двигателям. В этой статье будут освещены важные концепции для двигателей с фазным ротором, которые необходимо понять перед покупкой одного из них, но знайте, что это не все включено.
Пусковой ток
RMF статора вращается на полной скорости при запуске трехфазного асинхронного двигателя, в то время как ротор изначально находится в состоянии покоя. Ротор испытывает наведенный ток, когда через него проходит среднеквадратичное магнитное поле статора, и единственным ограничивающим фактором для этого тока является сопротивление обмоток ротора (ток = напряжение/сопротивление). Это приводит к большему току в роторе, что увеличивает потребность в токе в статоре и, следовательно, вызывает «бросок» пускового тока в двигатель. Этот ток может в два-семь раз превышать номинальный ток, указанный на паспортной табличке, и может вызвать серьезные проблемы в сценариях с высоким напряжением. Когда двигатель достигает номинальной скорости, ротор создает «противоЭДС» в статоре, которая снижает ток статора до номинального уровня. Пусковой ток — это то, что минимизируется в двигателях с фазным ротором за счет увеличения сопротивления в обмотках ротора (I=V/R, где R увеличивается), и поэтому они имеют такие плавные пусковые характеристики.
Этот ток может в два-семь раз превышать номинальный ток, указанный на паспортной табличке, и может вызвать серьезные проблемы в сценариях с высоким напряжением. Когда двигатель достигает номинальной скорости, ротор создает «противоЭДС» в статоре, которая снижает ток статора до номинального уровня. Пусковой ток — это то, что минимизируется в двигателях с фазным ротором за счет увеличения сопротивления в обмотках ротора (I=V/R, где R увеличивается), и поэтому они имеют такие плавные пусковые характеристики.
Момент двигателя и кривая момент-скорость
Наиболее важной характеристикой двигателей с фазным ротором является то, как они работают после подачи питания, и это визуализируется с помощью графиков крутящий момент-скорость. Асинхронные двигатели могут значительно превышать номинальный крутящий момент и ток, когда скорость не равна 100%; кривые крутящего момента и скорости отображают это переходное поведение, а на рисунке 1 показана общая кривая крутящего момента для асинхронных двигателей с обозначенными важными точками.
Рис. 1: Кривая крутящий момент-скорость для асинхронных двигателей.
Пусковой крутящий момент — это крутящий момент, создаваемый начальным пусковым током, который всегда выше номинального крутящего момента. Момент отрыва — это максимальный крутящий момент, достигаемый перед установившимся режимом, а номинальный крутящий момент — это то, что обеспечивается, когда двигатель достигает скорости 100 %. Эта связанная скорость не совсем равна синхронной скорости RMF, и это проскальзывание показано на рисунке 1.
Двигатели
, использующие популярные конструкции с короткозамкнутым ротором, имеют ограниченный контроль над своими кривыми крутящий момент-скорость (узнайте больше в нашей статье о двигателях с короткозамкнутым ротором). Стержни ротора с короткозамкнутым ротором закорочены; это приводит к невозможности изменить сопротивление ротора, а это означает, что единственный способ повлиять на скорость вращения — это изменить напряжение (I=V/R, где R постоянно). Это может вызвать проблемы в больших двигателях, где необходимый входной ток может стать опасно высоким. Двигатели с фазным ротором решают эту проблему, изменяя сопротивление ротора с помощью вторичной цепи, присоединенной к блоку сопротивления переменной мощности и токосъемным кольцам. Увеличивая сопротивление в роторе через контактные кольца, крутящий момент может быть достигнут на гораздо более низких скоростях, что обеспечивает более высокий начальный крутящий момент и более низкий пусковой ток. При достижении синхронной скорости сопротивление ротора также может быть закорочено, в результате чего двигатель с фазным ротором будет вести себя так, как если бы это был двигатель с короткозамкнутым ротором. На рис. 2 показано влияние увеличения сопротивления ротора на выходной крутящий момент.
Это может вызвать проблемы в больших двигателях, где необходимый входной ток может стать опасно высоким. Двигатели с фазным ротором решают эту проблему, изменяя сопротивление ротора с помощью вторичной цепи, присоединенной к блоку сопротивления переменной мощности и токосъемным кольцам. Увеличивая сопротивление в роторе через контактные кольца, крутящий момент может быть достигнут на гораздо более низких скоростях, что обеспечивает более высокий начальный крутящий момент и более низкий пусковой ток. При достижении синхронной скорости сопротивление ротора также может быть закорочено, в результате чего двигатель с фазным ротором будет вести себя так, как если бы это был двигатель с короткозамкнутым ротором. На рис. 2 показано влияние увеличения сопротивления ротора на выходной крутящий момент.
Рис. 2. Влияние изменения сопротивления ротора на пусковой момент и пусковой момент.
На этом графике видно, что двигатель с фазным ротором гораздо лучше справляется с управлением током, крутящим моментом и скоростью, чем другие конструкции. Изменяя сопротивление, этим двигателям потребуется меньший начальный пусковой ток для компенсации, они будут иметь более высокий пусковой момент и могут максимизировать свой пусковой момент, также сделав его пусковым моментом (пример кривой R2 на рис. 2). Результатом такого подхода является регулируемый по скорости двигатель с высоким пусковым моментом и низким пусковым током, с возможностью изменения этих характеристик по желанию оператора.
Изменяя сопротивление, этим двигателям потребуется меньший начальный пусковой ток для компенсации, они будут иметь более высокий пусковой момент и могут максимизировать свой пусковой момент, также сделав его пусковым моментом (пример кривой R2 на рис. 2). Результатом такого подхода является регулируемый по скорости двигатель с высоким пусковым моментом и низким пусковым током, с возможностью изменения этих характеристик по желанию оператора.
Применение и критерии выбора
Двигатели с фазным ротором могут выполнять то, что другие асинхронные двигатели не могут, а именно управление скоростью, током и крутящим моментом. Возможность увеличения сопротивления ротора при пуске двигателя позволяет плавно разгонять большие нагрузки до номинальной скорости. Когда пусковой ток должен быть сведен к минимуму или ограничение пускового тока ниже, чем могут выдержать двигатели с короткозамкнутым ротором/синхронные двигатели, рассмотрите возможность использования двигателя с фазным ротором.
У двигателей с фазным ротором есть недостатки, и они являются следствием их сложной конструкции. Вторичная цепь создает больше возможностей для ошибок, а щетки с контактными кольцами могут представлять угрозу безопасности, если их не проверять регулярно (изношенные щетки могут искрить и увеличивать риск возгорания). Эти двигатели также дороги в обслуживании, что увеличивает их и без того высокую цену. Их сложность также снижает общий КПД двигателя, и двигатель с короткозамкнутым ротором следует выбирать, если эффективность является основной задачей или конструктивным ограничением.
Несмотря на то, что двигатель с фазным ротором дорог и менее эффективен, его регулируемые характеристики крутящего момента и скорости отлично подходят для привода больших шаровых мельниц, больших прессов, насосов с регулируемой скоростью, кранов, подъемников и других нагрузок с высокой инерцией. Они также отлично подходят для любого приложения, которое требует плавного запуска и возможности изменения скорости. Они охватывают основы, недоступные другим асинхронным двигателям, и бесценны для разработчиков, которым необходим абсолютный контроль над выходной скоростью и крутящим моментом.
Они охватывают основы, недоступные другим асинхронным двигателям, и бесценны для разработчиков, которым необходим абсолютный контроль над выходной скоростью и крутящим моментом.
Резюме
В этой статье представлено понимание того, что такое двигатели с фазным ротором, как они работают и каковы их основные характеристики, определяющие, когда их следует выбирать по сравнению со стандартными асинхронными двигателями. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://hyperphysics.phy-astr.gsu.edu/hbase/magnet/indmot.html
- http://www.egr.unlv.edu/~eebag/Induction%20Motors.pdf
- https://oaktrust.library.tamu.edu/bitstream/handle/1969.1/163595/T17123-130.pdf?sequence=1&isAllowed=y
- http://www.
 animations.physics.unsw.edu.au/jw/electricmotors.html
animations.physics.unsw.edu.au/jw/electricmotors.html - https://scholar.cu.edu.eg
 animations.physics.unsw.edu.au/jw/electricmotors.html
animations.physics.unsw.edu.au/jw/electricmotors.htmlДругие изделия для двигателей
- Все о бесщеточных двигателях постоянного тока — что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают
- Синхронные двигатели и асинхронные двигатели — в чем разница?
- и щеточные двигатели — в чем разница?
- Кто изобрел паровой двигатель? Урок промышленной истории
- Все о двигателях с электронным управлением — что это такое и как они работают
- и серводвигатели — в чем разница?
- и двигатели постоянного тока — в чем разница?
- Все о контроллерах серводвигателей — что это такое и как они работают
- Что такое трехфазный двигатель и как он работает?
- ECM Motors и PSC Motors — в чем разница?
- Все о устройствах плавного пуска двигателей: что это такое и как они работают
- Все о контроллерах двигателей постоянного тока — что это такое и как они работают
- Основы тестирования двигателя (и ротора)
- Что такое штамповка двигателя и как это работает?
- Все о двигателях с дробной мощностью
Шаговые двигатели
Бесщеточные двигатели
Двигатели постоянного тока
Шаговые двигатели
Другие товары от Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
электрогенератор | инструмент | Британика
электрогенератор
Смотреть все СМИ
- Ключевые люди:
- Чарльз Протеус Стейнмец
Рукс Эвелин Белл Кромптон
Джон Хопкинсон
Сильванус Филлипс Томпсон
Эдвард Уэстон
- Похожие темы:
- магнитогидродинамический генератор энергии
термоэмиссионный преобразователь энергии
генератор переменного тока
правило правой руки
уровень напряжения
Просмотреть весь связанный контент →
Резюме
Прочтите краткий обзор этой темы
электрический генератор , также называемый динамо-машиной , любая машина, которая преобразует механическую энергию в электричество для передачи и распределения по линиям электропередач бытовым, коммерческим и промышленным потребителям. Генераторы также производят электроэнергию, необходимую для автомобилей, самолетов, кораблей и поездов.
Генераторы также производят электроэнергию, необходимую для автомобилей, самолетов, кораблей и поездов.
Механическая мощность для электрического генератора обычно получается от вращающегося вала и равна крутящему моменту вала, умноженному на вращательную или угловую скорость. Механическая энергия может поступать из ряда источников: гидравлические турбины на плотинах или водопадах; Ветряные турбины; паровые турбины, использующие пар, полученный с использованием тепла от сжигания ископаемого топлива или ядерного деления; газовые турбины, сжигающие газ непосредственно в турбине; или бензиновые и дизельные двигатели. Конструкция и скорость генератора могут значительно различаться в зависимости от характеристик механического первичного двигателя.
Почти все генераторы, используемые для питания электрических сетей, генерируют переменный ток, который меняет полярность с фиксированной частотой (обычно 50 или 60 циклов, или двойных перемен в секунду). Поскольку несколько генераторов подключены к электрической сети, они должны работать на одной частоте для одновременной генерации. Поэтому они известны как синхронные генераторы или, в некоторых случаях, генераторы переменного тока.
Поэтому они известны как синхронные генераторы или, в некоторых случаях, генераторы переменного тока.
Генераторы синхронные
Основной причиной выбора переменного тока для силовых сетей является то, что его постоянное изменение во времени позволяет использовать трансформаторы. Эти устройства преобразуют электроэнергию любого напряжения и силы тока в высокое напряжение и малый ток для передачи на большие расстояния, а затем преобразуют ее в низкое напряжение, подходящее для каждого отдельного потребителя (обычно 120 или 240 вольт для бытовых нужд). Конкретной используемой формой переменного тока является синусоида, которая имеет форму, показанную на рисунке 1. Она была выбрана потому, что это единственная повторяющаяся форма, для которой две волны, смещенные друг от друга во времени, могут быть сложены или вычтены и имеют такая же форма возникает в результате. В идеале тогда все напряжения и токи имеют синусоидальную форму. Синхронный генератор предназначен для воспроизведения этой формы настолько точно, насколько это практически возможно. Это станет очевидным, когда основные компоненты и характеристики такого генератора будут описаны ниже.
Это станет очевидным, когда основные компоненты и характеристики такого генератора будут описаны ниже.
Ротор
Простейший синхронный генератор показан в разрезе на рис. 2. Центральный вал ротора соединен с механическим первичным двигателем. Магнитное поле создается проводниками или катушками, намотанными в пазах, прорезанных на поверхности цилиндрического железного ротора. Этот набор катушек, соединенных последовательно, известен как обмотка возбуждения. Положение катушек возбуждения таково, что направленная наружу или радиальная составляющая магнитного поля, создаваемая в воздушном зазоре к статору, примерно синусоидально распределяется по периферии ротора. На рисунке 2 плотность поля в воздушном зазоре максимальна снаружи вверху, максимальна внутрь внизу и равна нулю с двух сторон, что приближает синусоидальное распределение.
Статор простейшего генератора на рис. 2 состоит из цилиндрического кольца из железа, обеспечивающего свободный путь для магнитного потока. В этом случае статор содержит только одну катушку, две стороны которой размещены в пазах в железе, а концы соединены вместе изогнутыми проводниками по периферии статора. Катушка обычно состоит из нескольких витков.
В этом случае статор содержит только одну катушку, две стороны которой размещены в пазах в железе, а концы соединены вместе изогнутыми проводниками по периферии статора. Катушка обычно состоит из нескольких витков.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подпишитесь сейчас
При вращении ротора в обмотке статора индуцируется напряжение. В любой момент величина напряжения пропорциональна скорости, с которой магнитное поле, окружаемое катушкой, меняется со временем, то есть скорости, с которой магнитное поле проходит две стороны катушки. Следовательно, напряжение будет максимальным в одном направлении, когда ротор повернется на 90° от положения, показанного на рисунке 2, и будет максимальным в противоположном направлении через 180° позже. Форма сигнала напряжения будет приблизительно синусоидальной, показанной на рисунке 1.9.0003
Конструкция ротора генератора на рис. 2 имеет два полюса, один для магнитного потока, направленного наружу, и соответствующий, для потока, направленного внутрь. В катушке статора индуцируется одна полная синусоида за каждый оборот ротора. Таким образом, частота электрической мощности, измеряемая в герцах (циклах в секунду), равна скорости вращения ротора в оборотах в секунду. Например, чтобы обеспечить подачу электроэнергии с частотой 60 герц, частота вращения первичного двигателя и ротора должна составлять 60 оборотов в секунду или 3600 оборотов в минуту. Это удобная скорость для многих паровых и газовых турбин. Для очень больших турбин такая скорость может быть избыточной по причинам механического напряжения. В этом случае ротор генератора выполнен с четырьмя полюсами, разнесенными с интервалом 90°. Напряжение, индуцируемое в катушке статора, расположенной под таким же углом в 90°, будет состоять из двух полных синусоид за один оборот. Требуемая скорость ротора для частоты 60 герц составляет тогда 1800 оборотов в минуту. Для более низких скоростей, используемых в большинстве водяных турбин, можно использовать большее количество пар полюсов. Возможные значения частоты вращения ротора в оборотах в минуту равны 120 f / p , где f — частота, а p — число полюсов.
В катушке статора индуцируется одна полная синусоида за каждый оборот ротора. Таким образом, частота электрической мощности, измеряемая в герцах (циклах в секунду), равна скорости вращения ротора в оборотах в секунду. Например, чтобы обеспечить подачу электроэнергии с частотой 60 герц, частота вращения первичного двигателя и ротора должна составлять 60 оборотов в секунду или 3600 оборотов в минуту. Это удобная скорость для многих паровых и газовых турбин. Для очень больших турбин такая скорость может быть избыточной по причинам механического напряжения. В этом случае ротор генератора выполнен с четырьмя полюсами, разнесенными с интервалом 90°. Напряжение, индуцируемое в катушке статора, расположенной под таким же углом в 90°, будет состоять из двух полных синусоид за один оборот. Требуемая скорость ротора для частоты 60 герц составляет тогда 1800 оборотов в минуту. Для более низких скоростей, используемых в большинстве водяных турбин, можно использовать большее количество пар полюсов. Возможные значения частоты вращения ротора в оборотах в минуту равны 120 f / p , где f — частота, а p — число полюсов.