Частота асинхронного генератора. Формулы. Расчёт. Теория
Разница между частотой вращения магнитного поля и ротора в асинхронных генераторах определяется коэффициентом s, называемым скольжением, который выражается соотношением:
s = (n — nr )/n .
Здесь:
n — частота вращения магнитного поля.
nr — частота вращения ротора.
Связь между угловой частотой вращения магнитного поля ω и угловой частотой вращения ротора ωr асинхронной машины можно выразить следующим образом:
ω = ωr /(1 — s) ,
что следует из определения скольжения.
В общем случае угловая частота вращения магнитного поля
ω = 2πn .
Так как частота генерируемых колебаний
f = pn ,
где р — число пар полюсов, то
ω = 2πf/p .
Аналогично угловая частота вращения ротора
ωr = 2πnr или ωr = 2πfr /p ,
где fr = pnr — электрическая частота вращения ротора.
Электрическая угловая частота вращения ротора
ωr p = 2πfr
В режиме автономного асинхронного генератора частота вращения магнитного поля, определяющая частоту генерируемых колебаний, зависит от частоты вращения ротора и от нагрузки, характеризуемой скольжением. Если нагрузка отсутствует, а включенная емкость и частота вращения ротора остаются постоянными, т.е. C = cоnst и ωr = cоnst, то частоту генерируемых колебаний можно выразить через параметры колебательного контура, который образуется собственной индуктивностью статорной обмотки и емкостью конденсатора.
При отмеченных условиях уравнение электрического равновесия, выраженное через мгновенные значения напряжений на синхронном индуктивном сопротивлении XL = ωL и на конденсаторе XC = ωC, принимает вид:
uL + uC = 0 .
После подстановок:
uL = Ldi/dt и di/dt = C d 2u/dt 2
где
i = C duC /dt ,
и преобразований, уравнение примет вид
d 2uC /dt 2 + uC /LC = 0
Примем, что напряжение на конденсаторе изменяется по синусоидальному закону:
uC = UC sinωt ,
тогда
d 2uC /dt 2 = -ω 2UC sinωt ,
С учетом последних соотношений из дифференциального уравнения находим:
ω = 1/√LC ,
откуда
f = 1/2π√LC
Таким образом, частота генерируемых колебаний при холостом ходе автономного асинхронного генератора определяется из условия резонанса емкости конденсатора и собственной индуктивности обмотки статора.
Если принять, что при холостом ходе скольжение s = 0, то получим
ω ≈ ωr
Тогда
f ≈ pnr = fr
Последнее выражение можно представить в виде
fr ≈ 1/2π√LC
Следовательно, при холостом ходе асинхронного самовозбуждающегося генератора параметры колебательного контура автоматически
настраиваются на частоту, равную электрической частоте вращения ротора.
Изменение значения включенной емкости при ωr = cоnst или частоты вращения ротора при С = cоnst не нарушает вышеописанных равенств, если генератор остается в области устойчивой работы. В первом случае мы имеем одну характеристику намагничивания машины, соответствующую данному значению частоты вращения и семейство вольтамперных характеристик возбуждающей емкости, причем каждая из характеристик составляет с положительным направлением оси абсцисс угол
αk = arctg(1/ωCk ) ,
где k = 1, 2, 3 . ..
..
Произведение собственных индуктивностей статорной обмотки и емкости конденсаторов остается практически постоянным, т.е.
LkCk = cоnst ,
так как вследствие нелинейности кривой намагничивания происходит соответствующее изменение индуктивности. Так с увеличением емкости ток холостого хода и степень насыщения магнитной цепи возрастают, а индуктивность уменьшается. Значение установившегося напряжения определяется точкой пересечения кривой намагничивания и вольтамперной характеристики конденсаторов.
Во втором случае, т.е. при переходе к новым значениям установившихся частот вращения с емкостью С = cоnst, мы имеем семейство кривых намагничивания и семейство вольтамперных характеристик возбуждающей емкости. Углы наклона последних к положительному направлению оси абсцисс находятся теперь по соотношению
αk = arctg(1/ωC) ,
Значение установившегося напряжения в каждом случае определяется точкой пересечения кривой намагничивания и вольтампер ной характеристики конденсаторов для данной угловой частоты ωk .
Получим теперь выражение для частоты генерируемых колебаний при нагрузке, полагая, что емкость конденсаторов и частота вращения ротора не изменяются. Выполнив необходимые преобразования из вышеописанных формул, получим:
f = fr /(1 — s ) ,
или
f = pnr /(1 — s ) ,
Заметим, что частота вращения ротора в большинстве случаев выражается в об/мин а не в сек/мин, тогда запишем
f = pnr /60(1 — s ) ,
Частота генерируемых колебаний при постоянной частоте вращения ротора и возрастающей нагрузке несколько уменьшается, так как на устойчивой части механической характеристики асинхронной машины скольжение пропорционально нагрузке.
С другой стороны, уменьшение частоты f при С = cоnst объясняется увеличением собственной индуктивности фазы статора вследствие возрастания коэффициента взаимоиндукции. Последнее вызывается размагничивающим действием тока ротора.
Последнее вызывается размагничивающим действием тока ротора.
Продолжение следует.
Ещё статьи для ознакомления:
Синхронный и асинхронный генератор. Отличия.
Асинхронный генератор. Характеристики.
Дизель-генераторы.
Замечания и предложения принимаются и приветствуются!
Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Поиск на сайте DPVA Поставщики оборудования Полезные ссылки О проекте Обратная связь Ответы на вопросы. Оглавление
| Адрес этой страницы (вложенность) в справочнике dpva. Поделиться:
Поиск в инженерном справочнике DPVA. Введите свой запрос: | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Коды баннеров проекта DPVA.ru Консультации и техническая | Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса.Free xml sitemap generator | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ru: главная страница / / Техническая информация/ / Оборудование/ / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
ru: главная страница / / Техническая информация/ / Оборудование/ / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
Частота
— взаимосвязь частот асинхронного двигателя
Во-первых, я знаю, что это очень старый пост, но ответ с самым высоким рейтингом на этот вопрос немного сбивает с толку. Хотя механическая частота, которую они получают в герцах, технически является правильной механической частотой, если бы мы выразили ее в герцах, мы могли бы добавить немного больше пояснений к тому, как мы к ней пришли.
Основы электрического машиностроения, Пятое издание, Стивен Дж. Чепмен прекрасно объясняет функционирование асинхронных двигателей, и я настоятельно рекомендую всем, кто изучает двигатели в целом, попробовать эту книгу.
Вот то, что, как мне кажется, представляет собой лучшее объяснение:
Скольжение можно получить, используя следующее уравнение:
$$s = \frac{n\tiny{sync}\normalsize{-n}\tiny{m }}{n\tiny{sync}}*(100)$$
где,
$$n\tiny{m}\normalsize{\text{= скорость ротора (вала) двигателя}}$$
$$n\tiny{sync}\normalsize{\text{=скорость магнитных полей}}$$
Это дает вам процент скольжения, который представляет собой процентную разницу между вращением0007 механическая скорость ротора и частота вращения магнитного поля в статоре .
По отношению к вращению магнитного поля механическая частота вала меньше скорости вращения магнитного поля на процент скольжения, рассчитанный нами выше.
$$n\tiny{m}\normalsize{\text{= скорость ротора (вала) двигателя}}$$
$$n\tiny{sync}\normalsize{\text{=скорость магнитных полей}}$$
Для расчета частоты магнитного поля в роторе используем уравнение:
$$f\tiny{r}\normalsize{=f\tiny{s}\normalsize{*s}}$$
куда,
$$f\tiny{s}\normalsize{\text{= частота магнитного поля в статоре}}$$
$$f\tiny{r}\normalsize{\text{= частота магнитного поля в роторе}}$$
$$s=скольжение$$
Частота магнитного поля, создаваемого током, индуцированным на роторе, прямо пропорциональна разности скоростей вращения между полем статора и механическим вращением ротора.
Итак, если мы хотим перейти от частоты статора к механической частоте, мы можем использовать:
$$f\tiny{m}\normalsize{= f}\tiny{s}\normalsize{*(1- s)}$$
где,
$$f\tiny{m}\normalsize{\text{= механическая частота ротора в герцах}}$$
Мы также можем сделать следующее:
Чтобы найти механическую частоту ротора, мы можем только реорганизовать исходное уравнение:
$$s = \frac{n\tiny{sync}\normalsize{-n}\tiny{m}}{n\tiny{sync}}$$
к
$$n\tiny{m}\normalsize{= n}\tiny{sync}\normalsize{-(s*n}\tiny{sync}\normalsize{)}$$
или
$$n\tiny{m}\normalsize{= n}\tiny{sync}\normalsize{(1-s)}$$
Если мы хотим изменить это на герцы, мы можем сделать это, переконфигурировав уравнение, которое мы используйте, чтобы найти скорость вращения магнитного поля в статоре:
$$n\tiny{sync} = \frac{\normalsize{120*f}\tiny{s}}{\normalsize{P}}$$
до
$$n\tiny{m} = \frac{\normalsize{120*f}\tiny{m}}{\normalsize{P}}$$
и, наконец:
$$f\tiny{m} = \frac{\normalsize{P*n }\tiny{m}}{\normalsize{120}}$$
Где:
$$P{\text{= количество полюсов в двигателе}}$$
$$f\tiny{m }\normalsize{\text{= механическая частота ротора в герцах}}$$
Надеюсь, это поможет будущим студентам, которые наткнутся на эту тему!
Как рассчитать число оборотов двигателя
При эксплуатации, контроле, ремонте или замене двигателя важно понимать его технические характеристики. Одним из важных измерений является число оборотов в минуту или RPM, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать число оборотов двигателя и почему это так важно.
Одним из важных измерений является число оборотов в минуту или RPM, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать число оборотов двигателя и почему это так важно.
Что такое число оборотов двигателя?
Об/мин — это единица измерения, используемая для описания скорости двигателя. Он обозначает количество оборотов в минуту и описывает скорость, с которой вращается ротор, то есть количество раз, которое вал ротора совершает полный оборот в минуту. Его можно использовать для измерения скорости двигателей, турбин, центрифуг, конвейеров и другого оборудования.
Почему важно рассчитывать число оборотов в минуту
Расчет числа оборотов двигателя, а также другие параметры, такие как крутящий момент, напряжение и мощность, необходимы при выборе двигателя для конкретного применения. Расчет скорости двигателя может помочь вам выбрать правильный тип двигателя при замене компонентов и принять более взвешенные решения по ремонту.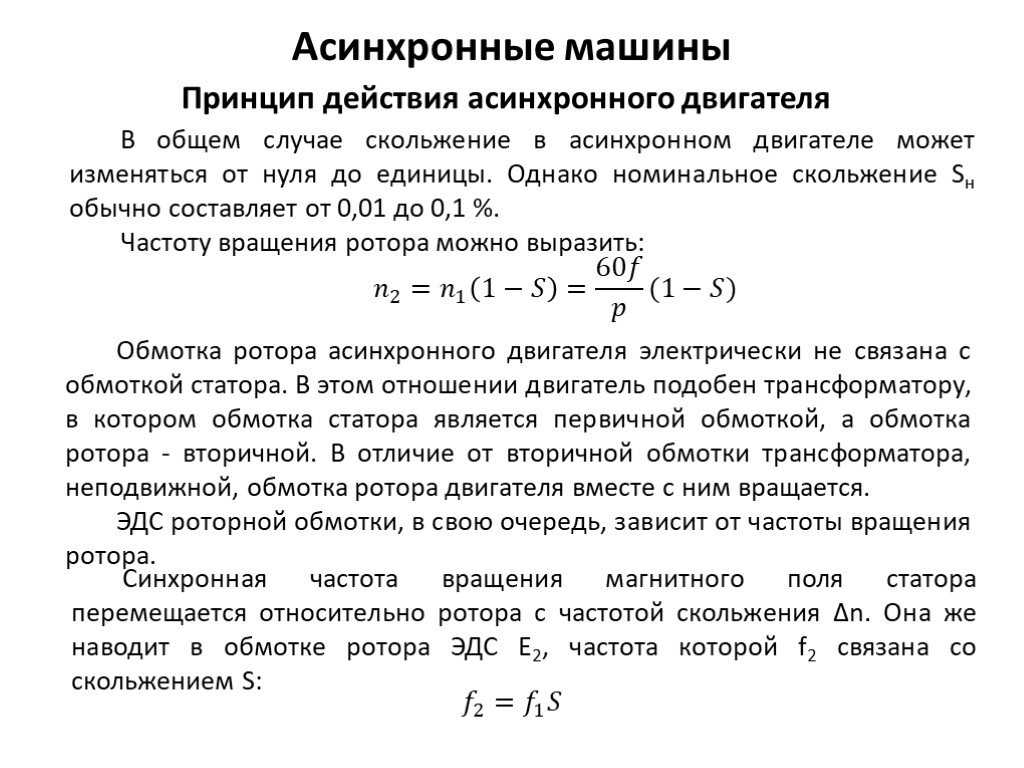 Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Запросить цену
Скорости асинхронного двигателя переменного тока
Двигатели переменного тока предназначены для работы на определенных скоростях. Эти скорости одинаковы даже для разных моделей и производителей. Скорость данного двигателя зависит от частоты сети источника питания, а не от напряжения, а также от количества полюсов, которые он имеет. Двигатели переменного тока часто имеют два или четыре полюса, но могут иметь и больше. Связь между полюсами и числом оборотов двигателя связана с магнитным полем, создаваемым полюсами статора. Это поле приводит к созданию магнитных полей в роторе, которые связаны с частотой поля в статоре.
Также необходимо учитывать скольжение, которое представляет собой разницу между синхронной скоростью статора и фактической рабочей скоростью. Ротор всегда вращается немного медленнее, чем магнитное поле статора, и всегда пытается «догнать» его, что создает крутящий момент, необходимый для запуска двигателя.
Чтобы отрегулировать скорость трехфазного двигателя переменного тока, вы можете отрегулировать частоту источника питания двигателя переменного тока с помощью элемента управления. Многие устройства управления переменным током также имеют однофазный вход, что позволяет запускать трехфазные двигатели, даже если у вас нет трехфазного питания. С другой стороны, большинство однофазных двигателей переменного тока не регулируются, поскольку они подключаются непосредственно к стандартной розетке и используют доступную частоту.
Скорости двигателя постоянного тока
Как и асинхронные двигатели переменного тока, двигатели постоянного тока с постоянными магнитами также имеют полюса, но полюса не влияют на скорость, как у двигателей переменного тока. На скорость двигателей постоянного тока влияет несколько других факторов, в том числе рабочее напряжение двигателя, сила магнитов и количество витков провода в якоре. Двигатели постоянного тока могут работать только на скоростях, номинальных для доступного для них напряжения.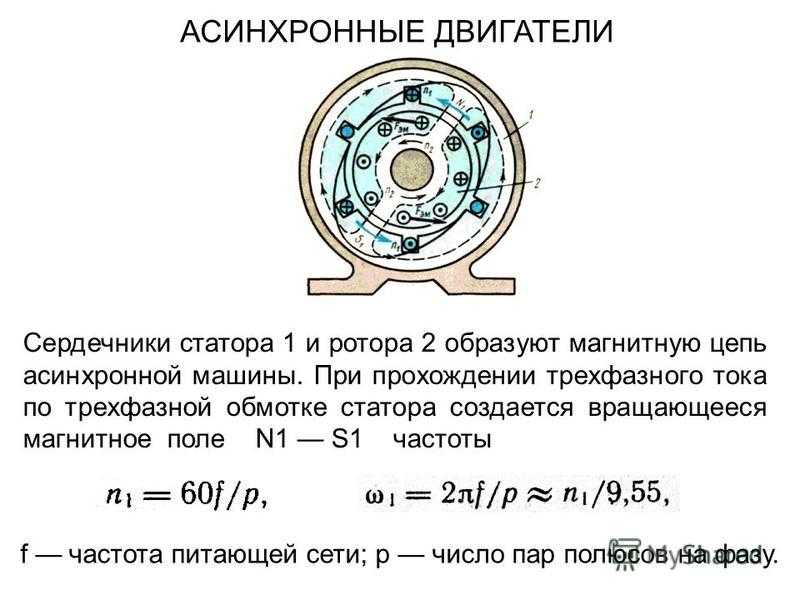
Если батарея, от которой работает двигатель, начинает разряжаться и подавать меньшее напряжение, скорость двигателя снижается. Если вы подключите двигатель к источнику питания, скорость увеличится, хотя это может вызвать дополнительный износ двигателя. Вы также можете использовать элементы управления для регулировки скорости двигателя постоянного тока, который работает путем изменения напряжения, доступного для двигателя.
Услуги по ремонту двигателей переменного/постоянного тока
Как рассчитать число оборотов двигателя
Чтобы рассчитать число оборотов асинхронного двигателя переменного тока, умножьте частоту в герцах (Гц) на 60 — — для количества секунд в минуте — на два для отрицательные и положительные импульсы в цикле. Затем вы делите на количество полюсов двигателя:
- (Гц x 60 x 2) / количество полюсов = об/мин без нагрузки
Вы также можете рассчитать коэффициент скольжения, вычитая номинальную скорость при полной нагрузке из синхронной скорости, разделив результат на синхронную скорость и умножив его на 100:
- ((синхронная скорость – номинальная скорость при полной нагрузке) / (синхронная скорость)) x 100 = рейтинг скольжения
Затем, чтобы найти число оборотов при полной нагрузке, вы конвертируете показатель скольжения в число оборотов в минуту, а затем вычитаете его из числа оборотов без нагрузки:
- Для расчета оборотов при полной нагрузке: об/мин – проскальзывание оборотов = обороты при полной нагрузке
Скорость вращения двигателя постоянного тока зависит от напряжения, подаваемого на двигатель. Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях. Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях. Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Примеры расчета оборотов двигателя по формуле
Рассмотрим несколько примеров расчета оборотов двигателя. Для двигателя переменного тока число полюсов и частота определяют число оборотов холостого хода. Для системы с частотой 60 Гц с четырьмя полюсами уравнение оборотов будет следующим:
- (Гц x 60 x 2) / количество полюсов = число оборотов без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 4 = 1 800 об/мин
Величина скольжения незначительно зависит от конструкции двигателя. Разумная скорость при полной нагрузке для четырехполюсного двигателя с частотой 60 Гц составляет 1725 об/мин. Скольжение – это разница между скоростью без нагрузки и скоростью с полной нагрузкой. В данном случае это будет:
- Обороты при полной нагрузке – Обороты без нагрузки = проскальзывание оборотов
- 1800 – 1725 = 75 об/мин
При частоте 60 Гц двухполюсный двигатель работает со скоростью 3600 об/мин без нагрузки и около 3450 об/мин с нагрузкой:
- (Гц x 60 x 2) / число полюсов = об/мин без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 2 = 3 600 об/мин
При частоте 60 Гц шестиполюсный двигатель будет работать со скоростью 1200 об/мин без нагрузки и примерно со скоростью 1175 об/мин с нагрузкой.