Адаптивное управление | это… Что такое Адаптивное управление?
См. также: Адаптивная система
Адаптивное управление — совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют возможность изменять параметры регулятора или структуру регулятора в зависимости от изменения параметров объекта управления или внешних возмущений, действующих на объект управления. Подобные системы управления называются адаптивными. Адаптивное управление широко используется во многих приложениях теории управления.
Содержание
|
Классификация адаптивных систем
По характеру изменений в управляющем устройстве адаптивные системы делят на две большие группы:
- самонастраивающиеся (изменяются только значения параметров регулятора)
- самоорганизующиеся (изменяется структура самого регулятора).

По способу изучения объекта системы делятся на
- поисковые
- беспоисковые.
В первой группе особенно известны экстремальные системы, целью управления которых является поддержание системы в точке экстремума статических характеристик объекта. В таких системах для определения управляющих воздействий, обеспечивающих движение к экстремуму, к управляющему сигналу добавляется поисковый сигнал. Беспоисковые адаптивные системы управления по способу получения информации для подстройки параметров регулятора делятся на
- системы с эталонной моделью (ЭМ)
- системы с идентификатором, в литературе иногда называют, как системы с настраиваемой моделью (НМ).
Адаптивные системы с ЭМ содержат динамическую модель системы, обладающую требуемым качеством. Адаптивные системы с идентификатором делятся по способу управления на
- прямой
- косвенный(непрямой).
При косвенном адаптивном управлении сначала делается оценка параметров объекта, после чего на основании полученных оценок определяются требуемые значения параметров регулятора и производится их подстройка. При прямом адаптивном управлении благодаря учёту взаимосвязи параметров объекта и регулятора производится непосредственная оценка и подстройка параметров регулятора, чем исключается этап идентификации параметров объекта. По способу достижения эффекта самонастройки системы с моделью делятся на
При прямом адаптивном управлении благодаря учёту взаимосвязи параметров объекта и регулятора производится непосредственная оценка и подстройка параметров регулятора, чем исключается этап идентификации параметров объекта. По способу достижения эффекта самонастройки системы с моделью делятся на
- системы с сигнальной (пассивной)
- системы с параметрической (активной) адаптацией.
В системах с сигнальной адаптацией эффект самонастройки достигается без изменения параметров управляющего устройства с помощью компенсирующих сигналов. Системы, сочетающие в себе оба вида адаптации называют
- комбинированными.
Применение
Применяется для управления нелинейной системой, и или системой с переменными параметрами. К примерам таких систем относят, например, асинхронные машины, транспортные средства на магнитной подушке, магнитные подшипники и т.п. Среди механических систем можно назвать инверсный маятник, подъемно транспортные машины, роботы, шагающие машины, подводные аппараты, самолеты, ракеты, многие виды управляемого высокоточного оружия и т. п.
п.
См. также
- Гомеостат
- Адаптация (биология)
- Адаптивная система
- Модель жизнеспособной системы
- Интеллектуальное управление
- Искусственный интеллект
Литература
- Ефимов Д. В., Робастное и адаптивное управление нелинейными колебаниями. — СПб.: Наука, 2005. — 314с. ISBN 5-02-025093-7
- Евланов Л. Г., Самонастраивающаяся система с поиском градиента методом вспомогательного оператора. Изв. АН СССР, ОТН, «Техническая кибернетика», 1963, № 1.
- Тюкин И. Ю., Терехов В. А., Адаптация в нелинейных динамических системах, (Серия: Синергетика: от прошлого к будущему), Санкт-Петербург: ЛКИ, 2008. — 384 с. ISBN 978-5-382-00487-7
- K. J. Astrom and B. Wittenmark, Adaptive Control, Addison-Wesley, 1989, 2d ed. 1994.
- Юревич Е. И. Теория автоматического управления. — СПб.: БXB-Петербург, 2007. — 560с.
Ссылки
- Задача адаптации. Virtual Laboratory Wiki. Архивировано из первоисточника 19 февраля 2012. Проверено 17 мая 2009.
- Dumont, Huzmezan: Concepts, methods and techniques in adaptive control (2002) (англ.)
- Shankar Sastry and Marc Bodson, Adaptive Control: Stability, Convergence, and Robustness, Prentice-Hall, 1989-1994 (англ.)
 Архивировано из первоисточника 19 февраля 2012. Проверено 17 мая 2009.
Архивировано из первоисточника 19 февраля 2012. Проверено 17 мая 2009.Адаптивное управление — Энциклопедия по экономике
Таким образом, модели данного вида применяются тогда, когда первоначальная информация недостаточна, а в результате ее дополнительного сбора точность оценок повышается. Как ошибка в оценках, так и отсрочка принятия решения приводят к потерям. Задача состоит в том, чтобы найти в этих условиях оптимальное решение. Процесс последовательного принятия решения является по своей природе адаптивным (см. Адаптивное управление, Адаптивные стратегии).
[c.270]
Адаптивное управление — управление на основе экстренных решений. Используется при условии частично предсказуемых сигналов из внешней среды, а также в условиях неожиданных событий. [c.58]
[c.58]
Наиболее интересны следующие разновидности адаптивного управления [c.58]
Чтобы справиться с быстро меняющимися задачами, организации стали использовать принцип своевременных решений, или так называемое адаптивное управление путем ранжирования стратегических задач. [c.60]
Лекции/семинары Управление по целям. Адаптивное управление 4 [c.211]
КОМБИНИРОВАНИЕ РОБАСТНОГО и АДАПТИВНОГО УПРАВЛЕНИЯ [c.59]
Рассмотренные выше свойства робастного и адаптивного управления приводят к заключению, что в процессе функционирования системы в одних случаях выгодно использовать робастное управление, в других — адаптивное, т.е. иметь возможность комбинировать управление в зависимости от состояния внешней среды. [c.63]
По истечении некоторого времени робастное управление имеет смысл переключить на адаптивное. Адаптивное управление позволяет более точно отследить входной сигнал при наличии информации о помехе. Адаптивное управление требовательно к богатству спектра входного сигнала, и, например, при медленно меняющихся сигналах возможны срывы процессов адаптации или сильное их замедление. В такой ситуации необходимо снова переходить на робастное управление, гарантирующее устойчивость работы системы.
[c.64]
В такой ситуации необходимо снова переходить на робастное управление, гарантирующее устойчивость работы системы.
[c.64]
Фрадков А.В. Адаптивное управление сложными системами. — М. Наука, 1990. [c.337]
Появление микропроцессоров дало возможность передать функции непосредственного цифрового управления от вычислительных машин регуляторам на основе микропроцессоров. ЭВМ в этом случае получает широкую возможность реализовывать функции оптимизации процесса и адаптивного управления. Применение таких систем резко сокращает количество кабелей и проводов, идущих к пункту управления. Не следует вместе с тем считать, что микропроцессоры призваны заменить существующие системы управления. Они открывают дополнительные возможности в повышении надежности системы и улучшении условий обслуживания. [c.243]
Рафаэль [33] предложил объединить под названием искусственный интеллект такое направление исследований, которое занимается поиском путей решения задач, в настоящее время не поддающихся решению на ЭВМ. Как только в определенной области достигаются значительные успехи, она с молчаливого согласия переводится в соответствующую категорию вычислительной науки — информационный поиск, теорию адаптивного управления, языки программирования, распознавание оптической информации и т. д. Единственное достоинство, которое я бы признал за этой точкой зрения, — это то, что она позволяет исследователю в области искусственного интеллекта рассматривать как свою профессиональную территорию все поле исследований, относящихся к вычислительной науке, поскольку само понятие исследования , по определению, относится лишь к тем областям, в которых еще не достигнуто значительных успехов, однако я отнюдь не уверен, будет ли это воспринято всеми специалистами в области вычислительной техники именно как достоинство.
[c.378]
Как только в определенной области достигаются значительные успехи, она с молчаливого согласия переводится в соответствующую категорию вычислительной науки — информационный поиск, теорию адаптивного управления, языки программирования, распознавание оптической информации и т. д. Единственное достоинство, которое я бы признал за этой точкой зрения, — это то, что она позволяет исследователю в области искусственного интеллекта рассматривать как свою профессиональную территорию все поле исследований, относящихся к вычислительной науке, поскольку само понятие исследования , по определению, относится лишь к тем областям, в которых еще не достигнуто значительных успехов, однако я отнюдь не уверен, будет ли это воспринято всеми специалистами в области вычислительной техники именно как достоинство.
[c.378]
Адаптивное управление также является управлением с обратной связью и отличается от последнего наличием специального адаптивного (приспособительного) механизма, накапливающего и анализирующего информацию о прошлых управленческих ситуациях, вырабатывающего новое поведение на основе прошлого опыта в соответствии с заложенными целями и критериями.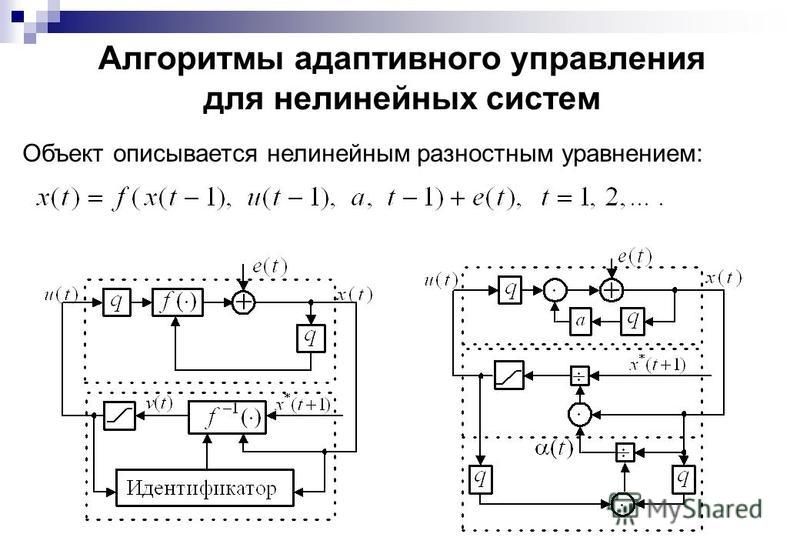 [c.33]
[c.33]
Адаптивное управление присуще сложным системам, которым в процессе функционирования приходится изменять программы и стратегии поведения путем обучения. Теория адаптивного управления пока не получила большого развития, как, например, теория систем с обратной связью, вследствие чрезвычайной сложности формирования принципов обучения. [c.33]
Какие существуют типы управления системами Что такое адаптивное управление [c.44]
Принцип адаптивности управления. В процессе развития финансового кризиса генерирующие его факторы характеризуются обычно высокой динамикой. Это предопределяет необходимость высокого уровня гибкости антикризисного финансового управления, его быстрой адаптации к меняющимся условиям внешней и внутренней финансовой среды. [c.225]
В этом параграфе будет рассмотрен ряд схем управления, так или иначе основанных на использовании идеи адаптации по результатам функционирования системы. В одних случаях целью адаптации является восстановление (идентификация) неизвестных центру параметров путем наблюдения и обработки результатов функционирования системы.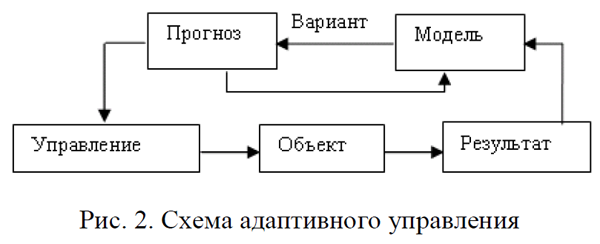 Это соответствует использованию центром адаптивных процедур формирования данных. В других случаях с учетом результатов прошлых периодов функционирования адаптивно формируются планы системы. Это соответствует адаптивному планированию. Возможны также различные комбинации адаптивных схем управления с ранее рассмотренными. Наличие в механизме функционирования той или иной схемы адаптивного управления приводит к появлению зависимости между отдельными периодами функционирования системы и, как следствие, к необходимости учета дальновидности элементов нижнего уровня. Подробное рассмотрение методов исследования функционирования систем с адаптивными схемами управления мы здесь приводить не будем. Это обусловливается тем, что сама методика построения принципов выбора рациональных стратегий и решений игры дальновидных элементов близка по духу к аналогичной методике, рассмотренной в предыдущем параграфе. В то же время результатов исследования таких механизмов функционирования в настоящее время получено сравнительно мало.
Это соответствует использованию центром адаптивных процедур формирования данных. В других случаях с учетом результатов прошлых периодов функционирования адаптивно формируются планы системы. Это соответствует адаптивному планированию. Возможны также различные комбинации адаптивных схем управления с ранее рассмотренными. Наличие в механизме функционирования той или иной схемы адаптивного управления приводит к появлению зависимости между отдельными периодами функционирования системы и, как следствие, к необходимости учета дальновидности элементов нижнего уровня. Подробное рассмотрение методов исследования функционирования систем с адаптивными схемами управления мы здесь приводить не будем. Это обусловливается тем, что сама методика построения принципов выбора рациональных стратегий и решений игры дальновидных элементов близка по духу к аналогичной методике, рассмотренной в предыдущем параграфе. В то же время результатов исследования таких механизмов функционирования в настоящее время получено сравнительно мало. Поэтому основной задачей этого параграфа является краткий обзор описаний ряда механизмов функционирования, включающих адаптивные схемы, с целью привлечения внимания к их исследованию.
[c.295]
Поэтому основной задачей этого параграфа является краткий обзор описаний ряда механизмов функционирования, включающих адаптивные схемы, с целью привлечения внимания к их исследованию.
[c.295]
Материал 6.1 подготовлен на основе [33]. В свою очередь эта работа является развитием более ранних публикаций по теории активных систем [37, 77, 97], где на модельных примерах проводилось рассмотрение ряда эффектов, связанных с появлением у активных элементов дальновидности. Определенный интерес, на наш взгляд, представляют описанные в этих работах механизмы адаптивного управления и результаты их рассмотрения. Достаточно общее рассмотрение схемы рационального поведения дальновидных элементов при адаптивном способе формирования данных было проведено авторами и опубликовано в [164]. Развитие этой схемы на случай комбинированного способа формирования данных есть в [10]. Материал 6.2, 6.3 подготовлен на основе этих работ. [c.312]
Молодцов Д. А. Адаптивное управление в повторяющихся играх. — Журнал вычислительной математики и математической физики, 1978, т. 18, № 1.
[c.377]
— Журнал вычислительной математики и математической физики, 1978, т. 18, № 1.
[c.377]
IV) программную и техническую реализацию адаптивного управления. [c.150]
Но выигрыш за все перечисленные трудности и затраты тоже немалый. Применение адаптивных технологий управления рисками позволяет смело вторгаться в ранее не изведанные сферы предпринимательства, поскольку появляются возможности, позволяющие своевременно выявлять и идентифицировать новые спектры деловых рисков, а также компоненты базового набора новых управленческих действий и новых реакций, которые будут наиболее эффективно воздействовать на факторы доходности и роста. После того как динамическая концепция принята, а вся технология адаптивного управления рисками налажена, задача риск-менеджеров сведется к творческому процессу, суть которого будет состоять в том, чтобы на основе базового набора реакций на риски наилучшим образом сформировать конкретные управленческие реакции (действия) в каждый момент управляемого процесса. Для решения творческой задачи синтеза риск-решений на основе базового набора риск-менеджеру потребуется четко ответить на два главных вопроса [c.173]
Для решения творческой задачи синтеза риск-решений на основе базового набора риск-менеджеру потребуется четко ответить на два главных вопроса [c.173]
Без учета этих факторов невозможно планировать стратегию развития. Поэтому успех любого предприятия или организации и возможность их выживания зависят от способности быстро адаптироваться к внешним изменениям. В постоянном стремлении поддерживать соответствие организации условиям внешней среды заключается принцип адаптивного управления. Он проявляется в динамичном освоении новой продукции, современной техники и технологии применении прогрессивных форм организации труда, производства и управления, непрерывном совершенствовании кадрового потенциала. [c.3]
Адаптивное управление промышленной фирмой [c.176]
Все это дает основание приравнивать адаптивное управление кризисной промышленной фирмой к антикризисному менеджменту, имеющему следующие особенности [c.180]
В качестве основной методологической задачи представленного учебного пособия выступает формирование у студентов глобального видения концепции инновационного менеджмента и понимания необходимости повышения гибкости и адаптивности управления компанией в условиях постоянно меняющейся внешней среды.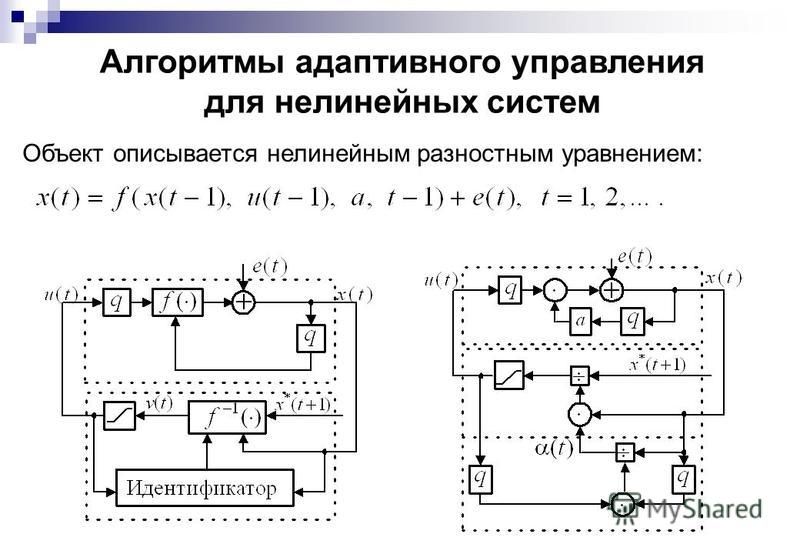 [c.8]
[c.8]
Предпринимательское управление характеризуется адаптивностью управления в условиях высокой неопределенности, более широким применением поведенческого и ситуационного подходов [c.155]
В адаптивных системах, которые должна непрерывно определять и отслеживать характеристики объекта управления, обязательно использование обратной связи. Адаптивное управление [c.29]
Адаптивное управление требует наличия падежной автоматизированной [c.50]
Адаптивное управление. Инвестиционно-строительный комплекс относится к классу систем, информация об условиях функционирования и развития которых никогда не бывает полной. Основными каналами, по которым неопределенность проникает в систему управления инвестиционным процессам, являются неточности в прогнозных оценках условий функционирования управляемого объекта запаздывания и искажения информации, поступающей в систему управления ограниченность управленческих ресурсов (дефицит времени на подготовку решений, недостаточная квалификация персонала и т. п=) непредсказуемые действия конкурентов и др.
[c.15]
п=) непредсказуемые действия конкурентов и др.
[c.15]
В условиях неполноты и неопределенности информации оптимальным может быть только адаптивное управление, обеспечивающее приспособление управляемого объекта к изменениям внешних условий за счет преобразования его структуры и методов управления. [c.15]
Двойственность обратных связей в адаптивном управлении находит свое отражение и в двойственности выходного результата инвестиционного процесса с одной стороны, это качество производимой продукции, освоение новых рынков, уровень сервисного обслуживания и т.п., — словом, все то, что определяет потребительскую удовлетворенность, а с другой, уровень технико-технологического потенциала инвестиционно-строительного комплекса и организационной культуры персонала, уровень управленческого потенциала и т.п. [c.18]
| Рис.3. Структура связей при адаптивном управлении инвестиционным процессом |
Адаптивная система управления — это, как правило, система управления с обучением, поскольку при этом имеет место целенаправленное изменение поведенческой активности на основе опыта. При адаптивном управлении процесс обучения осуществляется как бы «естественным» образом — посредством постоянного сравнения ожидаемых и фактических результатов с выявлением и анализом причин расхождений. Эти процедуры тесно взаимосвязаны и составляют единое целое, которое можно рассматривать как «знание», обеспечивающее принятие оптимальных решений.
[c.21]
При адаптивном управлении процесс обучения осуществляется как бы «естественным» образом — посредством постоянного сравнения ожидаемых и фактических результатов с выявлением и анализом причин расхождений. Эти процедуры тесно взаимосвязаны и составляют единое целое, которое можно рассматривать как «знание», обеспечивающее принятие оптимальных решений.
[c.21]
Следовательно при адаптивным управлении инвестиционным процессом инвестиционно-строительный комплекс можно рассматривать как обучающуюся систему, способности которой должны развиваться в соответствии с количеством и качеством новых знаний, накапливаемых в системе управления комплексом. Генерирование новой информации становится одной из наиболее важных функций обучающейся системы, поскольку новые знания через технические, технологические, организационные и др. изменения ведут в конечном счете к добавочному экономическому эффекту. В этой связи можно полностью согласиться с мнением, что главное, что мы приобретаем в ходе реализации инвестиционных проектов, — это прирост информированности [16].
[c.21]
Сегодняшний нейрокомпьютинг проходит «обкатку», в основном, в программном продукте для задач ассоциативной обработки данных, редко используя при этом свой «параллельный» потенциал. Такие приложения как раз и являются основной темой данной книги. Эпоха истинного — параллельного — нейрокомпьютинга начнется с выходом на рынок широкого ассортимента аппаратных средств — специализированных нейрочипов для обработки изображений, речи и прочей сенсорной информации. Можно представить себе, например, дверные замки, распознающие хозяина по виду, голосу, и быть может, запаху в совокупности. Системы жизнеобеспечения жилищ станут адаптивными и обучаемыми. Все бытовые приборы поумнеют и приобретут способность угадывать, что от них требуется именно в данный момент. Провозвестником таких изменений можно считать нейросетевой блок адаптивного управления в недавно появившемся пылесосе фирмы Samsung. [c.17]
В дополнение к экономии топлива модель Mondeo с передними ведущими колесами включает новейшие разработки в области динамики, безопасности и надежности и, кроме того, удовлетворяет самым высоким экологическим требованиям. По утверждениям руководства компании Ford, эта модель будет первым автомобилем в своем классе, который обладает следующими свойствами электронным управлением тягой, позволяющим устранить пробуксовку колес, адаптивным управлением подвеской для улучшения характеристик езды и управления. Воздушные подушки включены в стандартный набор вместе с противоугонной системой ABS. Во избежание краж на всех моделях были предусмотрены замки безопасности, сигнализация и устройство для блокировки запуска двигателя.
[c.579]
АДАПТИВНОЕ УПРАВЛЕНИЕ [adaptive ontrol] —такое управление, когда желательное состояние системы определяется на основе предшествующего процесса управления (т. е. на основе накопления опыта). В том же смысле употребляется термин «обучение». [c.13]
Несколько лет назад наиболее популярной ветвью теории управления была теория адаптивного управления. Она развивалась как для детерминированной, так и для вероятностной постановки задачи. Существует громадная библиография в этой области. Однако в последние годы интерес к этой теории стал заметно уменьшаться. Причина этого не только в сложности развитой теории, но и в сложности реализации предлагаемых алгоритмов. Алгоритмы адаптивного управления (прямого и непрямого) оказались негрубыми к неучтенным внешним и параметрическим возмущениям, причем алгоритмы беспоисковой самонастройки ляпуновского типа — особенно чувствительными. В восьмидесятые годы предприняты попытки строить грубые адаптивные регуляторы однако эти алгоритмы были сложны в реализации и по сути являлись подправленными алгоритмами ляпуновского типа.
[c.60]
Особенности адаптивных систем управления. Подобно робастной адаптивная система управления строится для объектов, информация о которых или о воздействиях на которые недоступна в начале функционирования системы. Чаще всего, свойство адаптации достигается посредством формирования в явном или неявном виде математической модели объекта или входного воздействия. Этим отличается как поисковое адаптивное управление, в основе которого поиск и удержание экстремума показателя качества управления, так и беспоисковое, в основе которого компенсация отклонения фактических изменений управляемых координат от желаемых изменений, соответствующих требуемому уровню показателя качества. Далее по уточненной модели происходит подстройка адаптивного регулятора.
[c.62]
Рассмотрим сначала, какую информацию можно использовать для работы интеллектуального блока системы. Как известно, SISO-системы хорошо описываются в частотной области. Поэтому естественно использовать частотные характеристики для организации процесса принятия решений при выборе типа управления. Как указывалось выше, частотная характеристика системы с робастным управлением соответствует наихудшему сочетанию параметров в области неопределенности. Поэтому робастное управление можно принять за одну из границ выбираемого управления. Другая граница определяется возможностями исследуемой системы (быстродействие привода, энерговооруженность и т.д.). Между этими двумя границами находится область, где разумно использовать адаптивное управление. [c.64]
Методы робастного, нейро-нечеткого и адаптивного управления / Под ред. Н.Д. Егупова. Из цикла учебников и учебных пособий Методы теории автоматического управления под ред. К.А. Пупкова. — М. Изд-во МГТУ им. Н.Э. Баумана, 2001. — 744 с.
[c.345]
В числе работ, идеи и результаты которых в этом плане мы пытались учесть, в первую очередь следует указать на работы по оптимальному планированию в народном хозяйстве, оптимальному функционированию социалистической экономики, исследованию структур организационных систем, программно-целевому планированию, итерационному планированию и управлению, моделированию и оптимальному управлению в экономических системах, информационной теории иерархических систем, теории координации в иерархических системах, функционированию децентрализованной экономики, теории игр с непротивоположными интересами, динамике коллективного поведения, идентификации и адаптивному управлению. Большое влияние на взгляды авторов и представляемую книгу оказали работы видных советских ученых в области теории организационного управления А. Г. Аганбегяна, В. Г. Афанасьева, Д. М. Гвишиани, С. В. Емельянова, Л. В. Канторовича, Н. Н. Моисеева, В. С. Немчинова, Г. X. Попова, Г. С. Поспелова, В. А. Трапезникова.
[c.11]
Важнейшей особенностью адаптивного управления является то, что общий алгоритм управления имеет двухуровневую структуру [13]. Алгоритм первого уровня (алгоритм регулирования) функционирует главным образом в режиме рутинизированных процедур и обеспечивает достижение целей управления в рамках «заданных» условий. Алгоритм второго уровня (алгоритм адаптации) определяет правила изменения параметров, структуры и методов управления на основе текущей информации, с тем чтобы обеспечить достижение целей управления, несмотря на дестабилизирующие воздействия среды на управляемый объект (рис.3). [c.18]
Что такое адаптивное управление? — Прямые и косвенные системы
Система может быть адаптирована при изменении поведения в соответствии с новыми обстоятельствами или изменениями в окружающей среде.
Адаптивный контроллер — это своего рода контроллер, который может изменять свое поведение в ответ на изменения в динамике системы и возмущения процесса.
Концепция адаптивного управления
Существует много определений адаптивного управления, одно из наиболее общепринятых состоит в том, что это тип нелинейной специальной системы управления, в которой состояние процесса может быть разделено на двух временных шкалах, которые развиваются на разных скоростях.
Существует множество типов контроллеров, обеспечивающих хорошие характеристики регулирования при изменении параметров системы. Но в соответствии с приведенным выше определением они не являются действительно адаптивными, поскольку адаптация выполняется в разомкнутом цикле .
На приведенном ниже рисунке показана общая схема адаптивного контроллера. В конструкцию современного контроллера входят три этапа. Моделирование системы, идентификация параметров модели и, наконец, проектирование контроллера.
Адаптивные системы , как правило, позволяют автоматизировать последние два этапа, хотя контроллеры, используемые в адаптивных системах, могут быть линейными.
Например, ПИД-регуляторы, с минимальной дисперсией, с прогнозированием и т. д., в сочетании с законами настройки параметров, вся система становится нелинейной системой. Следовательно, все анализы стабильности должны выполняться методами, применимыми к нелинейным системам.
Адаптивное управление относится к процедуре управления и используется контроллером, который должен адаптироваться к управляемой системе с отклоняющимися или неопределенными параметрами.
Адаптивная система управления обнаруживает изменения в производительности процесса и автоматически регулирует параметры управления. Это необходимо для компенсации изменяющихся условий процесса. Наконец, его работа заключается в оптимизации отклика контура.
Что такое адаптивное управление?
В частности, адаптивное управление представляет собой набор методов, которые позволяют регулировать значение параметров управления в режиме реального времени, обеспечивая хороший мониторинг контролируемых переменных, даже если параметры объекта неизвестны или изменяются с течением времени.
Это управление является особым типом нелинейного управления, и процесс может быть разделен на две шкалы времени: быстрое время (контур обратной связи) и медленное время (изменение параметров управления, влияющее на автоматизмы).
Адаптивное управление и его применение в промышленности – Структура адаптивного управления
Почему адаптивное управление, а не обычное?
Обычные контроллеры предназначены для настройки линейных и стационарных (LTI) систем. Это приближение верно для фиксированных точек работы с малыми возмущениями.
Когда это приближение больше не соответствует действительности, производительность обычных контроллеров становится неудовлетворительной. Адаптивное управление, с другой стороны, способно адаптироваться, изменяя свои параметры управления, поддерживая и продолжая хорошее управление процессом.
Адаптивное управление — это метод, при котором реакция контроллера изменяется автоматически в зависимости от изменений условий внутри процесса.
Адаптивный контроллер содержит небольшой компьютер, запрограммированный на изменение реакции контроллера в случае неправильной ошибки. Адаптивное управление получило свое название от способности контроллера приспосабливаться к изменяющимся условиям.
Адаптивное управление обычно используется в ситуациях, когда усиление процесса нелинейно, например, при регулировании pH.
Адаптивное управление — это такое управление, которое адаптируется к динамическим изменениям на предприятии с течением времени. Существуют различные методы применения этого типа управления, которые можно разделить на две большие группы:
Классификация адаптивных систем управления
Доступны два типа адаптивных систем управления. Это
- Косвенное адаптивное управление
- Прямое адаптивное управление
Косвенное адаптивное управление
Механизм настройки параметров применяется для получения оценки параметров модели системы.
Исходя из предположения, что параметры процесса хорошие, параметры контроллера получаются как решение проблемы проектирования с использованием оцененных параметров.
В этом случае можно выделить механизм оценки параметров объекта.
Прямое адаптивное управление
Механизм настройки параметров прямо указывает, в какой форме должны быть установлены параметры контроллера. Это означает, что параметры контроллера должны быть параметризованы в терминах параметров модели системы.
Следует отметить, что прямые адаптивные схемы требуют определенных свойств объекта, к которому они должны быть применены, тогда как косвенные схемы более широко применимы, что могут применяться различные методы идентификации и на основе полученных параметров проектировать конкретный контроллер .
Исторически сложилось так, что косвенных методов считаются соответствующими самонастраивающимся регуляторам (Self Tuning Regulator), а прямые схемы — регуляторам с эталонной моделью (Model Reference Adaptive Control). В настоящее время это разделение не такое резкое. Другая терминология, используемая для этого разделения, — это явные (косвенные) и неявные (прямые) адаптивные контроллеры.
Будьте первыми, кто получит эксклюзивный контент прямо на вашу электронную почту.
Обещаем не спамить. Вы можете отписаться в любое время.
Недействительный адрес электронной почты
Теория и приложения адаптивного управления
На этой странице
Авторские праваСтатьи по теме
Адаптивное управление является активной областью в разработке систем управления для работы с неопределенностями. Ключевое различие между адаптивными контроллерами и линейными контроллерами заключается в способности адаптивного контроллера приспосабливаться к неизвестным неопределенностям модели. Адаптивное управление можно условно разделить на две категории: прямое и косвенное. Косвенные методы оценивают параметры объекта и дополнительно используют предполагаемую информацию о модели для настройки контроллера. Прямые методы — это те, в которых оцениваемые параметры напрямую используются в адаптивном контроллере.
В последнее время много усилий было направлено на адаптивное управление как в теории, так и в приложениях. С теоретической точки зрения введены новые методы проектирования контроллеров для обработки нелинейных и изменяющихся во времени неопределенностей. Эти разработки могут охватывать более широкие системы с большими нелинейными неопределенностями. В результате адаптивное управление находит применение в различных реальных приложениях. На этом специальном заседании обобщаются некоторые из последних результатов адаптивного управления как в теории, так и в приложениях. После тщательного рассмотрения было отобрано 8 работ. Документы в этом специальном разделе включают следующее.
Бумага под названием «Адаптивное управление для нелинейных систем с изменяющимся во времени усилением управления» by A. Rincon и F. Angulo , схема для нелинейных объектов с изменяющимися во времени усилениями управления и изменяющимися во времени коэффициентами объекта предложена и применена к модели объекта, состоящей из модели типа Бруновского с полиномами в качестве аппроксиматоров. Методология была применена к управлению скоростью синхронного двигателя с постоянными магнитами (СДПМ), и были достигнуты надлежащие результаты отслеживания.
В документе, озаглавленном «Адаптивное управление импедансом для улучшения навыков человека в системе тактильного интерфейса », написанном С. Сузуки и К. Фурута , предлагается адаптивное вспомогательное управление для системы тактильного интерфейса. Адаптивный механизм, полученный из функции-кандидата Ляпунова, используется для настройки импеданса виртуальной модели тактильного устройства в соответствии с идентифицированными характеристиками оператора для повышения производительности. Было проверено, что характеристики оператора могут быть оценены и дополнительно улучшены.
Документ, озаглавленный «Подавление колебаний, вызванных пилотом, с помощью адаптивного управления L1» авторства C. Wang и C. Cao , где колебания, вызванные пилотом (PIO) — это явление, которое происходит как при летных испытаниях, так и действующие самолеты. В этой статье адаптивный контроллер L 1 был введен для подавления PIO, что вызвано ограничением скорости и чистой временной задержкой. Благодаря своей архитектуре адаптивный контроллер L 1 обеспечивает желаемую реакцию с быстрой адаптацией. Результаты моделирования показывают, что L 1 Адаптивное управление эффективно решает такие задачи.
В статье, озаглавленной «Адаптивное управление для класса нелинейных систем с перераспределенными моделями » Х. Ке и Дж. Ли, , новый адаптивный контроллер с несколькими моделями для класса нелинейных систем в параметрах предлагается форма строгой обратной связи. Это не только значительно улучшает переходные характеристики, но и гарантирует стабильность всех состояний замкнутой системы. Предлагается пример моделирования, иллюстрирующий эффективность разработанного многомодельного адаптивного регулятора.
В документе, озаглавленном «Адаптивное распределение управления при наличии отказов исполнительных механизмов» , авторы Y. Liu и L. G. Crespo предлагается структура распределения управления, в которой адаптивный сигнал обратной связи предназначен для группы резервных исполнительных механизмов и затем адаптивно распределяется между всеми членами группы. В структуре распределения адаптивного управления совместные исполнительные механизмы сгруппированы и рассматриваются как эквивалентный эффектор управления. Разработаны два адаптивных алгоритма распределения управления.
Реализация и эффективность предложенных стратегий подробно демонстрируется на нескольких примерах.
В работе X. Li и Z. Han под названием «Общая форма безмодельного закона управления и анализ сходимости » вводится общая форма модельного закона свободного управления и анализируется его сходимость. Во-первых, объясняется необходимость усовершенствования базовой формы безмодельного закона управления и представляется метод функциональной комбинации как подход к совершенствованию. Затем дается ряд достаточных условий, необходимых для сходимости. Анализ показывает, что эти условия легко выполняются в инженерной практике.
В статье под названием «Адаптивное управление системой электромагнитных клапанов на основе нелинейной динамической модели », написанной Д. Ли , П. Насерадинмусави и К. Натарадж , адаптивное управление на основе нелинейной модели подход предложен для системы соленоид-клапан. Проблема заключается в том, что соленоиды и дисковые затворы имеют неопределенности в нескольких параметрах модели, что затрудняет адаптацию системы к окружающей среде. Эти типы клапанов имеют различные физические характеристики, такие как ход, размер и вес; неопределенные параметры, включая коэффициенты инерции, демпфирования и крутящего момента; и различные виды рабочих параметров, таких как диаметр трубы и скорость потока. Эти неопределенности еще более усложняются из-за нелинейных динамических моделей соленоида и дроссельной заслонки. Основным вкладом этого исследования является применение теории адаптивного управления и подхода устойчивости по Ляпунову для проектирования контроллера для динамической модели системы электромагнитный клапан при наличии этих неопределенностей.