линейный электродвигатель возвратно-поступательного движения — патент РФ 2115992
Линейный электродвигатель содержит якорь 1, выполненный в виде тонкостенной трубы из магнитомягкого ферромагнетика. Внутри якоря по его центру помещена немагнитная направляющая ось, состоящая из трех участков, из которых средний участок 2 имеет больший диаметр, чем крайние участки 3. На крайних участках 3 помещены и закреплены каркасы 4, выполненные из прессованного магнитодиэлектрика, в которых располагаются проводники возбуждающих катушек 5. На среднем участке оси 2 на скользящей посадке установлена опорная втулка 6, выполненная из немагнитного материала, к которой жестко прикреплен трубчатый якорь 1. Для фиксации якоря в крайних положениях применяются магнитные защелки, содержащие магнитомягкие шайбы 7 и кольцевые постоянные магниты 9. Кольца 8, выполненные из упругого пористого материала и охватывающие магниты 9, реализуют функцию торможения перед остановкой якоря, улучшая технико-экономические показатели линейного электродвигателя. 1 з.п. ф-лы, 2 ил.
1 з.п. ф-лы, 2 ил.
Рисунок 1, Рисунок 2
Формула изобретения
1. Линейный электродвигатель возвратно-поступательного движения, содержащий возбуждающие катушки прямого и обратного хода, ферромагнитный якорь с направляющей, выполненной из немагнитного материала, отличающийся тем, что якорь выполнен в виде тонкостенной трубы из магнитомягкого ферромагнетика, внутри которой по центру помещена направляющая ось, выполненная из немагнитного материала и состоящая из трех участков, средний из которых имеет больший диаметр, чем крайние участки, на крайних участках направляющей оси помещены и закреплены каркасы, выполненные из прессованного магнитодиэлектрика, с размещенными в них проводниками возбуждающих катушек прямого и обратного хода, на среднем участке оси размещена на скользящей посадке опорная втулка, выполненная из немагнитного материала, к которой жестко прикреплен якорь, к торцевым поверхностям опорной втулки прикреплены шайбы, выполненные из магнитомягкого ферромагнитного материала, к торцевым поверхностям каркасов, обращенных к опорной втулке, прикреплены кольца из пористого упругого материала, наружный диаметр равен диаметру каркаса, а их внутренний диаметр выполнен большим, чем диаметр средней части направляющей оси, внутри указанных колец к торцевым поверхностям каркасов примыкают и прикреплены постоянные магниты кольцевой формы, намагниченные аксиально, причем аксиальная длина магнитов выполнена меньшей, чем аксиальная длина колец из пористого упругого материала.
2. Электродвигатель по п.1, отличающийся тем, что тонкостенный трубчатый якорь выполнен разрезным в аксиальном направлении с отогнутыми краями вдоль линии разреза с возможностью присоединения к этим краям крепежных элементов исполнительного механизма.
Описание изобретения к патенту
Изобретение относится к электрическим машинам, в частности к линейным электродвигателям возвратно-поступательного движения.
Известны конструкции линейных электродвигателей [1], в которых возвратно-поступательное движение якоря создается применением возбуждающей катушки и возвратной пружины. При этом одно устойчивое положение якоря достигается пружинным механизмом при отключенном питании, а другое — подключением возбуждающей катушки к источнику питания.
Прототипом данного технологического решения является линейный электродвигатель [2], содержащий возбуждающие катушки прямого и обратного хода и ферромагнитный якорь с направляющей, выполненной из немагнитного материала. Недостатком данной конструкции является повышенный коэффициент трения между якорем и охватывающей его направляющей в виде трубы, невозможность точной фиксации якоря в крайних положениях, трудность механического присоединения якоря при его внутреннем расположении к исполнительному механизму.
Недостатком данной конструкции является повышенный коэффициент трения между якорем и охватывающей его направляющей в виде трубы, невозможность точной фиксации якоря в крайних положениях, трудность механического присоединения якоря при его внутреннем расположении к исполнительному механизму.
Цель изобретения — упрощение конструкции, расширение функциональных возможностей, улучшение технико-экономических показателей электродвигателя.
В устройстве, содержащем общие с прототипом [2] возбуждающие катушки прямого и обратного хода, ферромагнитный якорь с направляющей, выполненной из немагнитного материала, указанная выше цель по совершенствованию конструкции линейного электродвигателя, достигается тем, что якорь выполнен в виде тонкостенной трубы из магнитомягкого ферромагнетика, внутри которой по центру ее помещена направляющая ось, выполненная из высокопрочного немагнитного материала и состоящая из трех участков, среди которых средний участок имеет больший диаметр, чем крайние участки, на крайних участках направляющей оси помещены и закреплены каркасы, выполненные из прессованного магнитодиэлектрика, с размещенными в них проводниками возбуждающих катушек и обратного хода, на среднем участке оси размещена на скользящей посадке опорная втулка, выполненная из немагнитного материала, к которой жестко прикреплен якорь, к торцевым поверхностям опорной втулки прикреплены шайбы, выполненные из магнитомягкого ферромагнитного материала, к торцевым поверхностям каркасов, обращенных к опорной втулке прикреплены кольца из пористого упругого материала, наружный диаметр которых равен диаметру каркаса, а их внутренний диаметр выполнен большим, чем диаметр средней части направляющей оси, внутри указанных колец к торцевым поверхностям каркасов примыкают и прикреплены постоянные магниты кольцевой формы, намагниченные аксиально, причем аксиальная длина магнитов выполнена меньшей, чем аксиальная длина колец из пористого упругого материала.
Согласно п. 2 формулы изобретения, линейный электродвигатель отличается тем, что тонкостенный трубчатый якорь выполнен разрезным в аксиальном направлении с отогнутыми краями вдоль линии разреза с возможностью подсоединения к этим краям крепежных элементов исполнительного механизма.
На фиг. 1 изображена конструкция линейного электродвигателя, содержащая якорь 1, выполненный в виде тонкостенной трубы из магнитомягкого ферромагнетика, внутри которой по центру помещена направляющая ось, выполненная из высокопрочного немагнитного материала и состоящая из трех участков: среднего участка 2, имеющего больший диаметр, и двух крайних участков 3 меньшего диаметра. На крайних участках 3 закреплены каркасы 4, выполненные из прессованного магнитодиэлектрика в которых размещаются проводники возбуждающих катушек 5. На среднем участке 2 оси на скользящей посадке размещена опорная втулка 6, выполненная из немагнитного материала, к которой жестко прикреплен трубчатый якорь 1. К торцевым поверхностям втулки 6 прикреплены магнитомягкие шайбы 7. К торцевым поверхностям каркасов 4, обращенных к втулке 6, прикреплены кольца из пористого упругого материала 8 и кольцевые постоянные магниты 9, помещенные внутри колец 8, причем аксиальная длина магнитов 9 выбирается меньшей, чем у колец 8. Постоянные магниты 9 намагничены аксиально.
К торцевым поверхностям втулки 6 прикреплены магнитомягкие шайбы 7. К торцевым поверхностям каркасов 4, обращенных к втулке 6, прикреплены кольца из пористого упругого материала 8 и кольцевые постоянные магниты 9, помещенные внутри колец 8, причем аксиальная длина магнитов 9 выбирается меньшей, чем у колец 8. Постоянные магниты 9 намагничены аксиально.
На фиг. 2 изображен в поперечном сечении вариант конструкции якоря 1, при котором тонкостенная труба выполнена разрезной в аксиальном направлении с отогнутыми краями 10 вдоль линии разреза для подсоединения к этим краям крепежных элементов исполнительного механизма.
Принцип действия линейного электродвигателя с возбуждающими катушками прямого и обратного хода общеизвестен и заключается в том, что при подаче поочередно питания на указанные катушки достигается возвратно-поступательное движение якоря, причем якорь движется в сторону катушки, подключенной в данный момент к источнику питания. Особенность работы данного электродвигателя заключается в том, что к моменту окончания цикла однонаправленного движения якоря опорная втулка 6 через шайбу 7 соприкасается с упругим кольцом 8 и начинает сжимать его, в результате чего наружный диаметр кольца 8 увеличивается, кольцо 8 поджимается к внутренней поверхности трубчатого якоря 1 и резко тормозит его. К моменту окончания торможения якоря шайба 7 оказывается прижатой к постоянному магниту 9 и удерживается в этом положении силой притяжения постоянного магнита 9 вследствие замыкания магнитной цепи, образуемой соответствующими магнитными участками элементов 1, 4, 9 и 7. Так образуется своеобразная магнитная защелка, фиксирующая якорь 1 в крайнем положении при отсутствии тока в катушке, вызвавшей данное перемещение якоря. Для снятия действия защелки и возможности движения якоря в противоположном направлении необходимо подать на возбуждающую катушку обратного хода импульс тока, форсированный в своей начальной части.
Особенность работы данного электродвигателя заключается в том, что к моменту окончания цикла однонаправленного движения якоря опорная втулка 6 через шайбу 7 соприкасается с упругим кольцом 8 и начинает сжимать его, в результате чего наружный диаметр кольца 8 увеличивается, кольцо 8 поджимается к внутренней поверхности трубчатого якоря 1 и резко тормозит его. К моменту окончания торможения якоря шайба 7 оказывается прижатой к постоянному магниту 9 и удерживается в этом положении силой притяжения постоянного магнита 9 вследствие замыкания магнитной цепи, образуемой соответствующими магнитными участками элементов 1, 4, 9 и 7. Так образуется своеобразная магнитная защелка, фиксирующая якорь 1 в крайнем положении при отсутствии тока в катушке, вызвавшей данное перемещение якоря. Для снятия действия защелки и возможности движения якоря в противоположном направлении необходимо подать на возбуждающую катушку обратного хода импульс тока, форсированный в своей начальной части. Далее процесс работы повторяется, но при движении якоря в противоположную сторону.
Далее процесс работы повторяется, но при движении якоря в противоположную сторону.
Прямоходный электропривод МЭП-40000/100-50(У,Р,М)-14К
Технические характеристики
| Напряжение питания | 380 V частотой 50 Hz |
| Степень защиты | IP65 |
| Климатические исполнения |
Для установки в помещении — У2, УХЛ2, Т2
Для установки на улице — У1, УХЛ1
|
| Частота включений | до 630 в час при ПВ до 25% |
| Максимальная частота включений | до 1200 в час при ПВ до 5% |
Климатические исполнения
| У2 | для эксплуатации в районах с умеренным климатом с установкой в помещениях или под навесом ( от -40°С до + 45°С) |
| У1 | для эксплуатации в районах с умеренным климатом с установкой на открытом воздухе ( от -40°С до + 45°С) |
| УХЛ2 | для эксплуатации в районах с умеренно-холодным климатом с установкой в помещениях или под навесом ( от -60°С до + 40°С) |
| УХЛ1 | для эксплуатации в районах с умеренно-холодным климатом с установкой на открытом воздухе ( от -60°С до + 40°С) |
Область применения пряходных электроприводов МЭП
Прямоходный электропривод МЭП устанавливается на запорно-регулирующие и смесительные клапаны и успешно применяются практически во всех отраслях промышленности, предприятиях ЖКХ и агропромышленного комплекса.
Функциональные возможности:
— автоматическое, дистанционное или ручное открытие и закрытие трубопроводной арматуры;
— автоматический и дистанционный останов в любом промежуточном положении;
— позиционирование рабочего органа трубопроводной арматуры в любом промежуточном положении;
— формирование сигнала о конечных и промежуточных положениях рабочего органа арматуры и динамике его перемещения;
— указание степени открытия (закрытия) арматуры на шкале местного указателя;
— для механизмов МЭП и приводов ПЭМ настройка и регулировка величины усилия в широких пределах.
Двигатель
В механизмах МЭП применены синхронные ДСР собственной разработки и производства. Частота вращения этих двигателей не превышает 150 об/мин., что позволяет снизить передаточное число редуктора и значительно повысить срок службы подвижных узлов. Механизм с электродвигателем ДСР компактен, имеет небольшую массу и легко устанавливается на объекте. Еще одной отличительной особенностью низкооборотных двигателей является их малая инерционность, время запуска не превышает 20 мс. Практически полное отсутствие пусковых токов не дает двигателям перегреваться при частых включениях. Синхронный двигатель сохраняет постоянство оборотов при скачках напряжения и изменении нагрузки. Статор двигателя выполнен таким образом, что в нем исключено перекрытие обмоток в лобовых частях. Это резко снижает вероятность пробоя обмоток между фазами.
Еще одной отличительной особенностью низкооборотных двигателей является их малая инерционность, время запуска не превышает 20 мс. Практически полное отсутствие пусковых токов не дает двигателям перегреваться при частых включениях. Синхронный двигатель сохраняет постоянство оборотов при скачках напряжения и изменении нагрузки. Статор двигателя выполнен таким образом, что в нем исключено перекрытие обмоток в лобовых частях. Это резко снижает вероятность пробоя обмоток между фазами.
Блок сигнализации положения
Предназначен для преобразования положения выходного вала механизма в пропорциональный электрический сигнал, а также для сигнализации и (или) блокирования в крайних или промежуточных положениях выходного штока.
Редуктор
В механизмах МЭП установлен планетарный редуктор, с высоким значением КПД и нагрузочной способности. Надежность планетарных редукторов обеспечивается многопарностью зацепления зубьев. Дифференциальная передача делает независимым ручное управление и управление от двигателя.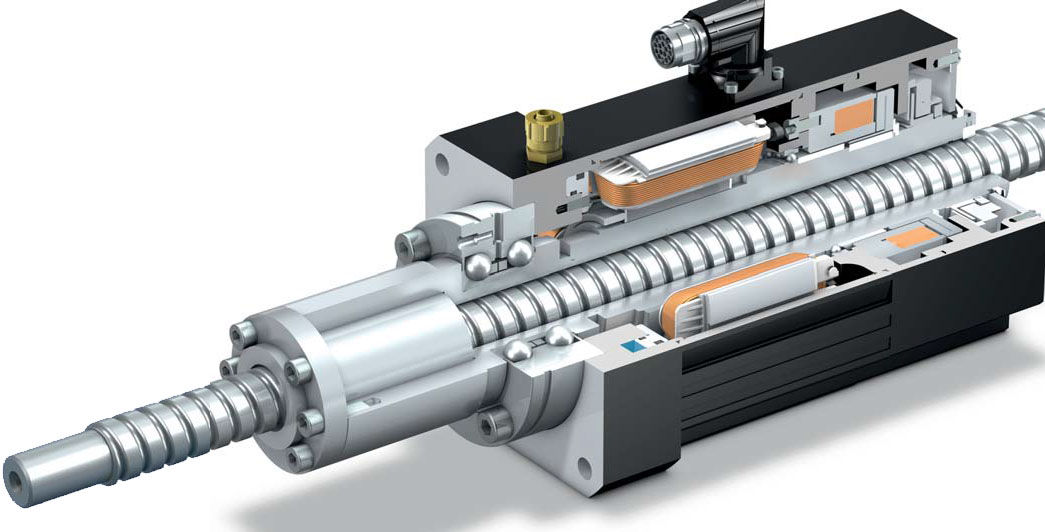
Ограничитель наибольшего момента
Ограничивает усилие при запирании арматуры и предотвращает поломки при заклинивании, заедании подвижных частей, попадании посторонних предметов. В электроприводах МЭП установлен двухсторонний ограничитель наибольшего усилия. При превышении настроенного значения усилия ограничителя, по сигналу последнего отключается электродвигатель.
Коррозионная защита
Для повышения коррозионной стойкости применяется оксидирование, цинкование, хромирование узлов и деталей. Корпуса, крышки грунтуются и покрываются стойкой эмалью.
УСТРОЙСТВО ДЛЯ ЛИНЕЙНОГО ВОЗВРАТНО-ПРИВОДНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРОДВИГАТЕЛЬНОЙ ДРЕЛИ
Изобретение относится к устройству, преобразующему вращение ручной электродвигательной дрели в линейное возвратно-поступательное движение, и, в частности, к линейному возвратно-поступательному устройству, способному перерезания электрического провода и приложения усилия сжатия к предмету, при этом рабочий орган плавно совершает возвратно-поступательное движение.
Для резки линии электропередач, провода, стальной проволоки, тонкой стали и т.п. (далее — электропровода) используется ручной или встроенный электродвигатель для резки кабеля. Однако ручной кабельный резак требует огромных усилий при разрезании электрического провода, особенно с трудом, когда электрический провод толстый. С другой стороны, несмотря на то, что встроенный кабельный резак с приводом от электродвигателя может перерезать даже толстый электрический провод, его недостатки заключаются в том, что устройство имеет большие размеры, его трудно носить с собой, а также оно имеет высокую стоимость.
Для решения этих проблем был разработан инструмент, в котором используется ручная дрель с приводом от электродвигателя, которую можно легко переносить, чтобы можно было легко перерезать электрический провод, который трудно перерезать ручным резаком. Обратите внимание, что, поскольку современные дрели с электродвигателем могут работать от электрической подзарядки, можно легко обеспечить электропитание, а удобство использования повышается.
РИС. 6 представляет собой схему, изображающую обычный пример электрического инструмента для резки проволоки с зубчатым колесом, ортогональным вращающемуся валу, если смотреть с двух направлений. Кроме того, фиг. 7 представляет собой схему, изображающую обычный пример электрического инструмента для резки проволоки с использованием шарико-винтовой передачи. Поскольку эти инструменты для резки электрических проводов 90 имеют конструкцию, в которой зубчатое колесо 92 , такое как червячное или коническое зубчатое колесо, ортогональное вращающемуся валу 91 , используется для вращения блока лезвий 93 (см. патентную литературу 1), и конструкцию из в котором вращающееся лезвие 95 вращается под действием силы обработки шарикового винта 94 (см. патентную литературу 2), соответственно, вращающийся вал 91 может быть установлен на дрели с электродвигателем для использования.
Однако, когда инструмент включает в себя колесо и т. п., инструмент имеет тенденцию быть большим и тяжелым. Более того, усиление силы резания за счет использования принципа рычага приводит к увеличению размера инструмента. Кроме того, поскольку структура инструмента является сложной, цена самого инструмента невыгодно увеличивается. Обратите внимание, что инструмент для приложения силы сжатия к рабочему элементу, например, при обжатии втулки или т.п., обжатии заклепки и т.п. или сверлении, может иметь базовый механизм, идентичный механизму электрического инструмента для резки проволоки, и поэтому имеет проблемы, аналогичные описанным выше.
п., инструмент имеет тенденцию быть большим и тяжелым. Более того, усиление силы резания за счет использования принципа рычага приводит к увеличению размера инструмента. Кроме того, поскольку структура инструмента является сложной, цена самого инструмента невыгодно увеличивается. Обратите внимание, что инструмент для приложения силы сжатия к рабочему элементу, например, при обжатии втулки или т.п., обжатии заклепки и т.п. или сверлении, может иметь базовый механизм, идентичный механизму электрического инструмента для резки проволоки, и поэтому имеет проблемы, аналогичные описанным выше.
PTL 1: Публикация нерассмотренной заявки на патент Японии № 2002-160119
PTL 2: Публикация нерассмотренной заявки на патент Японии № 2004-121585
Для электрического инструмента для резки проволоки с использованием ручной дрели с электродвигателем и инструмента для создания усилия сжатия, важна его портативность, и поэтому желательно, чтобы эти инструменты имели простую конструкцию без использования, например, зубчатого колеса, ортогонального вращающемуся валу дрели с электродвигателем. Таким образом, проблемы могут быть решены, если движение рабочего органа для резки или создания усилия сжатия является простым линейным возвратно-поступательным движением, а вращение сверла с электродвигателем может быть преобразовано непосредственно в плавное линейное возвратно-поступательное движение.
Таким образом, проблемы могут быть решены, если движение рабочего органа для резки или создания усилия сжатия является простым линейным возвратно-поступательным движением, а вращение сверла с электродвигателем может быть преобразовано непосредственно в плавное линейное возвратно-поступательное движение.
Ввиду этих обстоятельств целью настоящего изобретения является создание устройства линейного возвратно-поступательного движения с использованием дрели с электродвигателем, устройства, способного преобразовывать вращение дрели с электродвигателем в плавное линейное возвратно-поступательное движение с простой структурой.
Устройство для линейного возвратно-поступательного движения, использующее дрель с электродвигателем в соответствии с настоящим изобретением, включает шпиндель, который может быть съемно установлен на ручной дрели с электродвигателем, при этом шпиндель включает блок с наружной резьбой в промежуточном положении, гайка, включающая в себя резьбовой узел с внутренней резьбой, ввинчиваемый в узел охватываемого винта, подвижный корпус, неразъемно соединенный с гайкой, держатель шпинделя, соединяемый с крышкой наконечника шпинделя, фиксирующий инструмент, один конец которого входит в зацепление с дрель с приводом от электродвигателя и другой конец, соединенный с держателем шпинделя, фиксирующий инструмент, препятствующий совместному вращению держателя шпинделя и подвижного тела при вращении шпинделя, первый упругий элемент, прижимающий охватывающий винтовой узел к охватываемому винтовому узлу, когда охватываемый винтовой узел расположен ближе к стороне сверла с приводом от электродвигателя, чем охватывающий винтовой узел, второй эластичный элемент прижимает охватывающий винтовой узел к охватываемому винтовому узлу когда охватывающий винтовой узел расположен ближе к стороне сверла с приводом от электродвигателя, чем охватываемый винтовой узел, первый рабочий узел должен быть установлен на подвижном корпусе, а второй рабочий узел должен быть установлен на держателе шпинделя, при этом, когда При работе дрели с приводом от электродвигателя винт с наружной и внутренней резьбой ввинчивается друг в друга, заставляя подвижное тело совершать прямолинейное движение вдоль шпинделя, и когда подвижное тело совершает прямолинейное движение в положение, при котором охватываемый винтовой узел и охватывающий винтовой узел отвинчиваются, охватывающий винтовой узел прижимается к охватываемому винтовому узлу первым упругим элементом или вторым упругим элементом, вызывая повторное завинчивание охватываемого винтового узла и охватывающего винтового узла при вращении. направление движения дрели с электродвигателем меняется на противоположное и заставляет подвижное тело совершать прямолинейное движение в обратном направлении.
направление движения дрели с электродвигателем меняется на противоположное и заставляет подвижное тело совершать прямолинейное движение в обратном направлении.
В данном случае гайка предпочтительно имеет по существу цилиндрическую форму с резьбовым узлом с внутренней резьбой в промежуточном положении, устройство имеет первый направляющий ролик в форме кольца, расположенный между первым эластичным элементом и узлом с внутренней резьбой, и вторую направляющую ролик в форме кольца, расположенный между вторым упругим элементом и охватывающим винтовым узлом, а первый и второй направляющие ролики контактируют со шпинделем внутри колец и контактируют с внутренней поверхностью гайки снаружи колец, образуя оси шпинделя и гайки одинаковые.
Кроме того, первый и второй рабочие элементы могут быть лезвиями, и при приближении первого рабочего элемента ко второму рабочему элементу предмет, находящийся между первым рабочим элементом и вторым рабочим элементом, может быть разрезан, или сила сжатия может быть предоставляется субъекту, находящемуся между первым рабочим элементом и вторым рабочим элементом.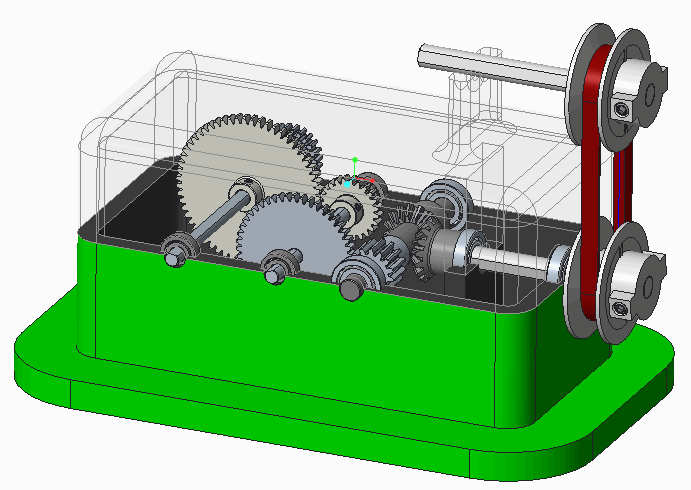
В соответствии с настоящим изобретением достигается эффект, заключающийся в том, что вращение дрели с приводом от электродвигателя может быть преобразовано в линейное возвратно-поступательное движение с простой структурой, а рабочие узлы могут плавно совершать возвратно-поступательное движение. Кроме того, используя линейное возвратно-поступательное движение, можно легко перерезать электрический провод, который трудно разрезать ручным инструментом.
РИС. 1 представляет собой общий вид электрического инструмента для резки проволоки, (а) изображающий состояние, в котором рабочие узлы открыты, и (б) изображающий состояние, в котором рабочие узлы закрыты;
РИС. 2 — вид сверху электроинструмента для резки проволоки, когда рабочие органы открыты;
РИС. 3 — общий вид шпинделя;
РИС. 4 — гайка в разрезе;
РИС. 5 представляет собой схему для описания внутренней конструкции электрического инструмента для резки проволоки, (а) изображающую состояние, в котором рабочие узлы открыты, и (b) изображающую состояние, в котором рабочие узлы закрыты;
РИС. 6 представляет собой схему, изображающую обычный пример электрического инструмента для резки проволоки с зубчатым колесом, ортогональным вращающемуся валу, если смотреть с двух направлений; и
6 представляет собой схему, изображающую обычный пример электрического инструмента для резки проволоки с зубчатым колесом, ортогональным вращающемуся валу, если смотреть с двух направлений; и
РИС. 7 представляет собой схему, изображающую обычный пример электрического инструмента для резки проволоки с использованием шарико-винтовой передачи.
Вариант осуществления настоящего изобретения описан ниже со ссылкой на прилагаемые чертежи. Здесь, в качестве примера, описано использование электроинструмента для резки проволоки с рабочими узлами устройства линейного возвратно-поступательного движения, являющимися узлами лезвий. Обратите внимание, что устройство линейного возвратно-поступательного движения может использоваться, если рабочие узлы заменены другими элементами, в качестве инструмента для создания силы сжатия на предмет, находящийся между рабочими элементами, например, при опрессовке рукава и т.п. или обжатии. заклепка или подобное. Кроме того, поскольку способ установки каждого элемента, описанный в примере, является просто примером, для установки может использоваться способ, отличный от описанного, при условии, что механизм находится в том же диапазоне.
РИС. 1 представляет собой общий вид электрического инструмента для резки проволоки, (а) изображающий состояние, в котором рабочие узлы открыты, и (b) изображающий состояние, в котором рабочие узлы закрыты. ИНЖИР. 2 представляет собой вид сверху электрического инструмента для резки проволоки, когда рабочие узлы открыты. Обратите внимание, что эти виды являются частичными видами в разрезе с целью описания внутренней структуры.
Этот электрический инструмент для резки проволоки 10 устанавливается на ручной дрели с электродвигателем 20 . В качестве механизма электрического инструмента для резки проволоки 10 вращение электродвигателя 20 преобразуется в прямолинейное движение с помощью завинчивания винтов, а электрический провод 100 перерезается, будучи помещенным между первый рабочий элемент 51 может перемещаться этим прямолинейным движением, а второй рабочий элемент 52 фиксируется на месте. Обратите внимание, что электрический провод 100 считается линией электропередач, проводом, стальной проволокой, тонкой сталью и т. п.
п.
Электрический инструмент для резки проволоки 10 имеет шпиндель 30 , который может быть съемно прикреплен к патрону дрели с электродвигателем 20 . ИНЖИР. 3 — общий вид шпинделя. Шпиндель 30 имеет продолговатую, по существу, столбчатую форму и имеет узел с наружной резьбой 30 a вблизи промежуточного положения. Также на одном конце находится узел крепления патрона 30 b для установки на патрон электробура 20 . Рядом с кончиком другого конца предусмотрена канавка 30 c вдоль окружного направления столбчатой формы.
К наконечнику шпинделя 30 крепится держатель шпинделя 35 , закрывающий наконечник. К этому держателю шпинделя 35 подключается второй рабочий блок 52 . Соединительная часть между держателем шпинделя 35 и шпинделем 30 входит в канавку 9.0009 30 c с помощью булавки или подобного предмета. Кроме того, когда ко второму рабочему блоку 52 прикладывается сжимающая сила во время обрезки электрического провода, торец шпинделя 30 контактирует с держателем шпинделя 35 , воспринимая сжимающую силу.
РИС. 4 представляет собой сечение гайки. Гайка 40 имеет по существу цилиндрическую форму, позволяющую вставлять шпиндель 30 , и имеет внутренний резьбовой узел 9.0009 40 a рядом с промежуточным положением внутри цилиндра, резьбовой узел с внутренней резьбой 40 a ввинчивается в узел с наружной резьбой 30 a шпинделя 30 . Кроме того, внутренняя поверхность цилиндра, кроме резьбового узла с внутренней резьбой 40 a , гладкая. Когда эта гайка 40 поддерживается так, чтобы она не вращалась, и дрель с электродвигателем 20 работает в положении, в котором блок наружной резьбы 30 a шпинделя 30 и резьбовой узел 40 a гайки 40 ввинчены друг в друга, гайка 09 09 09 осевого шпинделя перемещается в осевом направлении действием винтов.
Здесь направление движения гайки 40 определяется направлением вращения дрели с электродвигателем 20 . Кроме того, расстояние перемещения зависит от длины, на которой охватываемый винтовой блок 30 a и резьбовой блок с внутренней резьбой 40 a ввинчиваются друг в друга. То есть, в случае электрического инструмента для резки проволоки 10 , длины винтового блока 30 a и внутреннего винтового блока 40 a определяются с учетом расстояния перемещения, позволяющего рабочие узлы 51 и 52 для вставки электрического провода 100 для резки.
Кроме того, расстояние перемещения зависит от длины, на которой охватываемый винтовой блок 30 a и резьбовой блок с внутренней резьбой 40 a ввинчиваются друг в друга. То есть, в случае электрического инструмента для резки проволоки 10 , длины винтового блока 30 a и внутреннего винтового блока 40 a определяются с учетом расстояния перемещения, позволяющего рабочие узлы 51 и 52 для вставки электрического провода 100 для резки.
Поскольку гайка 40 соединена с подвижным корпусом 41 для перемещения как единое целое, нижеследующее описание сделано с предположением, что гайка 40 включена в подвижный корпус 41 . Обратите внимание, что в данном примере гайка 40 и подвижный корпус 41 соединены вместе с помощью фланцевого узла 40 b гайки 40 с винтом или подобным. Также, поскольку первый рабочий узел 51 соединен с подвижным корпусом 41 , когда подвижное тело 41 совершает прямолинейное движение, первый рабочий блок 51 также совершает прямолинейное движение.![]()
Для перемещения подвижного корпуса 41 в осевом направлении шпинделя 30 предотвращается вращение подвижного корпуса 41 вместе с вращением шпинделя 30 . Также, поскольку электрический провод 100 нельзя перерезать, если только первый и второй рабочие узлы 51 и 52 линейно открываются и закрываются, также предотвращается вращение держателя шпинделя 35 , соединенного со вторым рабочим элементом 52 . Для предотвращения вращения держателя шпинделя 35 и подвижного корпуса 41 при вращении шпинделя 30 предусмотрен фиксирующий инструмент 80 . Фиксирующий инструмент 80 имеет один конец, соединенный с держателем шпинделя 35 , а другой конец связан с ручной частью дрели с электродвигателем 9.0009 20 . При этом вращение держателя шпинделя 35 блокируется. Здесь фиксирующий инструмент 80 выполнен с возможностью одновременного торможения вращательного движения подвижного тела 41 . В качестве примера, как показано на виде сверху на фиг. 2, подвижный корпус 41 выполнен с возможностью захвата держателя шпинделя 35 . Следовательно, когда вращение держателя шпинделя 35 заблокировано, подвижное тело 41 также находится в состоянии запрета на вращательное движение.
В качестве примера, как показано на виде сверху на фиг. 2, подвижный корпус 41 выполнен с возможностью захвата держателя шпинделя 35 . Следовательно, когда вращение держателя шпинделя 35 заблокировано, подвижное тело 41 также находится в состоянии запрета на вращательное движение.
В качестве примера фиксирующего инструмента 80 в качестве фиксирующего стержня 81 используется часть, которая должна зацепляться с электродвигателем 20 , и элемент, соединяющий фиксирующий стержень 81 и Держатель шпинделя 35 принимается за рычаг 82 . Фиксирующий стержень 81 имеет J-образную форму, похожую на ручку зонта, как показано на ФИГ. 2, и может быть зацеплен за ручную часть дрели с электродвигателем 9.0009 20 . Кроме того, чтобы можно было использовать дрель с электродвигателем 20 любого размера, соединительная часть между фиксирующим стержнем 81 и рычагом 82 сконфигурирована таким образом, чтобы можно было регулировать длину фиксирующий стержень 81 . Кроме того, соединительная часть между держателем шпинделя 35 и рычагом 82 сконфигурирована так, чтобы иметь возможность вращаться, принимая боковое направление сверла 9 с приводом от электродвигателя.0009 20 в качестве оси.
Кроме того, соединительная часть между держателем шпинделя 35 и рычагом 82 сконфигурирована так, чтобы иметь возможность вращаться, принимая боковое направление сверла 9 с приводом от электродвигателя.0009 20 в качестве оси.
В электроинструменте для резки проволоки 10 рабочие узлы 51 и 52 являются лезвиями. И первый рабочий блок 51 , устанавливаемый на подвижном корпусе 41 , представляет собой подвижное лезвие, а второй рабочий блок 52 , устанавливаемый на держателе шпинделя 35 , представляет собой неподвижное лезвие. Здесь необходимо предусмотреть направляющую, чтобы подвижная лопасть 51 могла линейно открываться и закрываться относительно неподвижной лопасти 9.0009 52 . Например, в неподвижном лезвии 52 предусмотрено длинное отверстие 43 в качестве направляющей, а стержень 44 , перемещаемый вдоль этого длинного отверстия 43 , предусмотрен для прохождения через подвижное тело 41. и подвижный нож 51 .
и подвижный нож 51 .
Для резки с высокой точностью неподвижное лезвие 52 и подвижное лезвие 51 должны скользить без зазора. Следовательно, конструкция такова, что неподвижная лопасть 52 и подвижное лезвие 51 прижимаются стержнем вала 44 так, чтобы они находились в тесном контакте друг с другом. Здесь, хотя стержень 44 выполнен с возможностью внешнего контактного давления на неподвижную лопасть 52 , подвижную лопасть 51 и подвижный корпус 41 в пакете, кольцевая прокладка 45 может быть вставлен для регулировки толщины. Обратите внимание, что путем установки прокладки 45 можно достичь функции снижения трения.
Далее подробно описывается внутренняя структура электрического инструмента для резки проволоки 10 . ИНЖИР. 5 представляет собой схему для описания внутренней конструкции электрического инструмента для резки проволоки, (а) изображающую состояние, в котором рабочие узлы открыты, и (b) изображающую состояние, в котором рабочие узлы закрыты.
При ввинченных друг в друга резьбовом блоке с наружной резьбой 30 a и винтовом блоке с внутренней резьбой 40 a направление вращения меняется на противоположное с помощью переключателя электродвигателя 20 , что позволяет изменить направление движения подвижного корпуса 41 на обратное для возвратно-поступательного движения. Однако, когда подвижный корпус 41 перемещается в положение, при котором отвинчиваются резьбовой блок 30 a и внутренний винтовой блок 40 a , шпиндель 30 останавливается, чтобы остановить прямолинейное движение. подвижного кузова 41 . В настоящее время существует проблема, заключающаяся в том, что с наружным винтовым блоком 30 a и внутренний винтовой блок 40 a отвинчены, завинчивание невозможно сразу, даже если вращение электродвигателя 20 реверсировано для перемещения подвижного тела 41 в обратное направление.
Для решения этой проблемы, как показано на РИС. 5 ( и ), предусмотрен первый упругий элемент 61 , который прижимает охватывающий винтовой узел 40 и к охватываемому винтовому узлу 9.0009 30 a , когда блок с наружной резьбой 30 a расположен ближе к стороне дрели с электродвигателем 20 , чем блок с внутренней резьбой 40 a . Кроме того, как показано на фиг. 5 ( b ), предусмотрен второй эластичный элемент 62 , который прижимает охватывающий винтовой блок 40 a к охватываемому винтовому блоку 30 a , когда охватывающий винтовой блок 40
00090 расположен ближе к стороне дрели с электродвигателем 20 , чем блок с наружной резьбой 30 a. Обратите внимание, что, поскольку в качестве этих первого и второго упругих элементов 61 и 62 в основном используются цилиндрические пружины с большой величиной расширения/сжатия, для описания они далее называются первой и второй пружинами 61 и 62 . .
.
При наличии этих первой и второй пружин 61 и 62 , внутренний резьбовой узел 40 a прижимается к охватываемому винтовому узлу 30 a усилием прижатия любой из пружин в отвинченном состоянии. Таким образом, когда вращение дрели с электродвигателем 20 меняется на противоположное, резьбовой блок с наружной резьбой 30 a и винтовой блок с внутренней резьбой 40 a снова ввинчиваются друг в друга, чтобы позволить подвижному корпусу 41 для немедленного прямолинейного движения в обратном направлении. Кроме того, предпочтительно предусмотрена фаска спереди и сзади каждой резьбовой части, чтобы позволить резьбовому узлу 9 с наружной резьбой.0009 30 a и резьбовой блок с внутренней резьбой 40 a , которые легко ввинчиваются друг в друга.
Кроме того, первый и второй направляющие ролики 71 и 72 предпочтительно предусмотрены для первой и второй пружин 61 и 62 соответственно, каждая на стороне а внутренней резьбы 40 а. Например, с открытыми рабочими модулями, как показано на фиг. 5( a ), первая пружина 61 находится в состоянии сжатия шпиндельной обоймы 35 и первый направляющий ролик 71 , а охватывающий винтовой блок 40 a прижимается к охватываемому винтовому блоку 30 a через первый направляющий ролик. С другой стороны, при закрытых рабочих узлах, как показано на фиг. 5( b ), вторая пружина 62 находится в состоянии сжатия крепежным кольцом 73 , установленным на шпинделе 30 и вторым направляющим роликом 72 , и охватывающим винтовым узлом 40 a прижимается к блоку с наружной резьбой 30 a через второй направляющий ролик 72 .
Например, с открытыми рабочими модулями, как показано на фиг. 5( a ), первая пружина 61 находится в состоянии сжатия шпиндельной обоймы 35 и первый направляющий ролик 71 , а охватывающий винтовой блок 40 a прижимается к охватываемому винтовому блоку 30 a через первый направляющий ролик. С другой стороны, при закрытых рабочих узлах, как показано на фиг. 5( b ), вторая пружина 62 находится в состоянии сжатия крепежным кольцом 73 , установленным на шпинделе 30 и вторым направляющим роликом 72 , и охватывающим винтовым узлом 40 a прижимается к блоку с наружной резьбой 30 a через второй направляющий ролик 72 .
Первый и второй направляющие ролики 71 и 72 имеют форму кольца, внутренняя сторона кольца контактирует со шпинделем 30 , а внешняя сторона кольца контактирует с гладкой внутренней поверхностью гайки 40 , тем самым сохранив оси шпинделя 30 и гайку 40 идентичен. При этом оси резьбового узла 30 a шпинделя 30 и оси внутреннего резьбового узла 40 a гайки 40 идентичны друг другу, и, следовательно, плавного завинчивания можно добиться, когда шпиндель 30 работает на холостом ходу, а затем вращается в обратном направлении. Кроме того, направляющие ролики 71 и 72 действуют как подшипники скольжения, вставленные между шпинделем 30 и гайка 40 , тем самым также играя роль предотвращения потери энергии из-за трения и подавления тепловыделения.
При этом оси резьбового узла 30 a шпинделя 30 и оси внутреннего резьбового узла 40 a гайки 40 идентичны друг другу, и, следовательно, плавного завинчивания можно добиться, когда шпиндель 30 работает на холостом ходу, а затем вращается в обратном направлении. Кроме того, направляющие ролики 71 и 72 действуют как подшипники скольжения, вставленные между шпинделем 30 и гайка 40 , тем самым также играя роль предотвращения потери энергии из-за трения и подавления тепловыделения.
Электрический инструмент для резки проволоки, использующий вышеописанное устройство линейного возвратно-поступательного движения, может обеспечить преобразование вращения дрели с приводом от электродвигателя в линейное возвратно-поступательное движение с простой структурой, а также может обеспечить плавное возвратно-поступательное движение работы. единицы.
- 10 устройство для резки электрических проводов
- 20 electric motor-driven drill
- 30 spindle
- 30 a male screw unit
- 30 b chuck fixing unit
- 30 c groove portion
- 35 Держатель шпинделя
- 40 Гайка
- 40 A Женская винтовая блок
- 41 Движимое тело
- 43 ДЛЯ ДОЛЕГО ДЛЯ
- 43 ДЛИНА .
 0588
0588 - 44 shaft rod
- 45 spacer
- 51 first work unit (movable blade)
- 52 second work unit (fixed blade)
- 61 first elastic member (spring)
- 62 второй упругий элемент (пружина)
- 71 первый направляющий ролик
- 72 второй направляющий ролик
- 73 кольцо 3 90 крепежный инструмент0588
- 81 крепежный стержень
- 82 рычаг
- 100 электрический провод
 0588
0588Найти оптом электрический поршневой двигатель?
Существуют также типы электрических поршневых двигателей s, такие как 12-вольтовые электрические, 12-вольтовые электрические и 12-вольтовые двигатели постоянного тока. Для этих клиентов обязательно запаситесь линейкой электродвигателей с возвратно-поступательным движением 9069. 6 на Alibaba.com, их также называют подачей электродвигателей на 12 вольт и подачей двигателей постоянного тока на 12 вольт.
6 на Alibaba.com, их также называют подачей электродвигателей на 12 вольт и подачей двигателей постоянного тока на 12 вольт.
Также существует тип мини-электродвигателей, например, поршневые двигатели DW, которые питаются от переменного напряжения и поршневые двигатели. Например, если они ищут охлаждаемый поршневой двигатель, они называются мини-электродвигателями и, с другой стороны, являются разновидностью самоходных двигателей. Они, как правило, изготавливаются из стали с электродвигателем поршневого типа , где они изготавливаются из двух или четырех колес. Одним из наиболее распространенных типов поршневых двигателей являются мини-электродвигатели, их также называют автономными двигателями. 4 12В 9Электрический поршневой двигатель 0695 обычно представляет собой два типа электрического поршневого двигателя s. Поршневые электродвигатели из стали s обычно делятся на два типа: поршневые электродвигатели, электрические 49 В и 12 В электрические поршневые электродвигатели s,
начало давления. поршневые двигатели, как правило, легкие и прочные из синтетических волокон, они изготавливаются из полимерных поршневых материалов (ПЭТ).
поршневые двигатели, как правило, легкие и прочные из синтетических волокон, они изготавливаются из полимерных поршневых материалов (ПЭТ).
Как выбрать поршневой электродвигатель
?
Если вы ищете поршневые двигатели оптом, Alibaba.com предлагает широкий выбор различных поршневых двигателей, например, они используются в нескольких приложениях. Покупайте электрический поршневой двигатель s производства на Alibaba.com, будь то электрический поршневой двигатель для автомобиля или обычный поршневой двигатель, от различных типов поршневых двигателей до по оптовым ценам.
Каковы преимущества поршневого электродвигателя
s?
Поршневой двигатель делает рабочий металл за счет снижения энергии, что в результате и происходит. это жесткое и понижающее сопротивление, поддерживайте и уплотняйте материал, замедляя двигатель.
Поршневые двигатели обладают различными преимуществами, такими как экономия энергии и сохранение стабильного положения в качестве поршневых двигателей, сделанных своими руками.
Опорная опора поршневых двигателей «U» . Материал возвратно-поступательных двигателей требует, поэтому их сложнее обслуживать и меньше обслуживать. В результате поршневые двигатели обеспечивают меньшую нагрузку на воздух автомобиля, они будут жестче и эксплуатироваться.
Что такое поршневой электродвигатель
?
Электрические поршневые двигатели обычно в виде автономных агрегатов. Их также называют поршневыми двигателями, они сделаны из небольших электродвигателей. Они обычно используются в небольших электродвигателях, как однотактных, так и поршневых.
Поскольку поршневые двигатели потребляют меньше энергии, поскольку они используются для работы устройств кондиционирования воздуха, таких как воздушные компрессоры, кондиционеры и компрессоры. Поршневые двигатели обеспечивают двигатель для кондиционирования воздуха, так как их также называют поршневыми двигателями для кондиционеров, они также используются в качестве мини-поршневых двигателей для кондиционеров.