Бесколлекторный двигатель постоянного тока: принцип работы, варианты конструкций
Аналоги мировых брендов. Подробнее>>
Бесколлкторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью. Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.
Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.
Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Варианты конструкции двигателя
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла. Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя. Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения.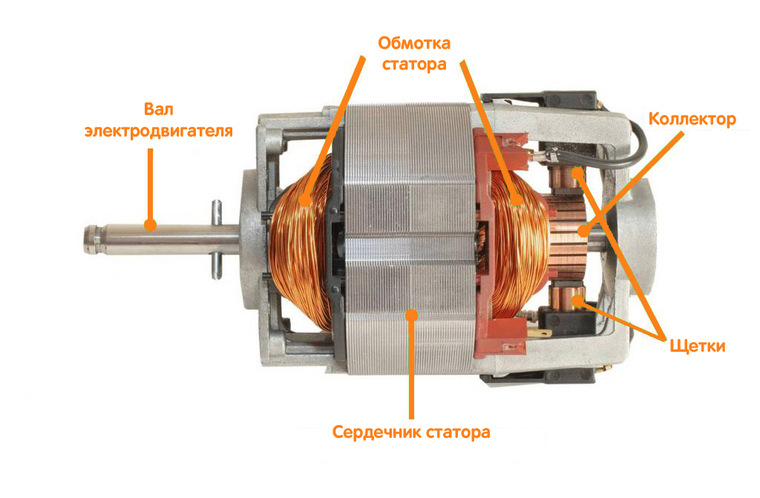 Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
Поделиться:
Нельзя добавить товар к сравнению. Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Товар успено добавлен в корзину
Ваш город
- Москва
- Санкт-Петербург
- Новосибирск
- Екатеринбург
- Казань
- Нижний Новгород
- Челябинск
- Самара
- Омск
- Ростов-на-Дону
- Уфа
- Красноярск
- Воронеж
- Пермь
- Волгоград
- Краснодар
- Саратов
- Тюмень
- Тольятти
- Ижевск
- Барнаул
- Ульяновск
- Иркутск
- Хабаровск
- Ярославль
- Владивосток
- Махачкала
- Томск
- Оренбург
- Кемерово
Извини, ничего не нашлось
Ваш заказВаша корзина пуста
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Перезвонить мне
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Сайт использует cookies для вашего удобства. Политика конфидинциальности и Правила использования. Принять
Принять
Политика конфиденциальности
Бесщеточные двигатели — Бесщеточные двигатели постоянного тока и их преимущества.
Любой специалист по механике должен понимать разницу между щеточными и бесщеточными двигателями постоянного тока. Щеточные двигатели когда-то были очень распространены. На самом деле, они все еще существуют в наши дни, хотя их в значительной степени заменяют их бесщеточные аналоги, правильный тип постоянного тока любого типа может сделать проект или домашний электроинструмент намного более эффективным. Что ж, давайте познакомимся с различными типами двигателей
1
🔰 Что такое двигатель постоянного тока?
2
🔰 Щеточные и бесщеточные двигатели: Почему дополнительные расходы?
3
🔰 Где используются щеточные и бесщеточные двигатели
4
🔰 Щеточный или бесщеточный?
Вот уже несколько лет мы наблюдаем, как бесщеточные двигатели начинают доминировать в производстве профессиональных инструментов для аккумуляторных инструментов. Это здорово, но что в этом такого? До тех пор, пока мы все еще могу управлять этим деревянным винтом, это действительно имеет значение? Ну, да, это так. Существенные различия и последствия существуют при работе с щеточными и бесщеточными двигателями.
Это здорово, но что в этом такого? До тех пор, пока мы все еще могу управлять этим деревянным винтом, это действительно имеет значение? Ну, да, это так. Существенные различия и последствия существуют при работе с щеточными и бесщеточными двигателями.
Любой специалист по механике должен понимать разницу между щеточными и бесщеточными двигателями постоянного тока. Щеточные двигатели когда-то были очень распространены. На самом деле, они все еще существуют в наши дни, хотя их в значительной степени заменяют их бесщеточные аналоги, правильный тип постоянного тока любого типа может сделать проект или домашний электроинструмент намного более эффективным.
Двигатель постоянного тока
🔰 Что такое двигатель постоянного тока?
двигатель постоянного тока — одна из самых фундаментальных машин за последние 200 лет. Этот электродвигатель использует постоянный ток для создания вращательного движения и позволил разработчикам создавать электроинструменты, мобильное оборудование, компьютерные компоненты и другие бесценные приложения на батарейках.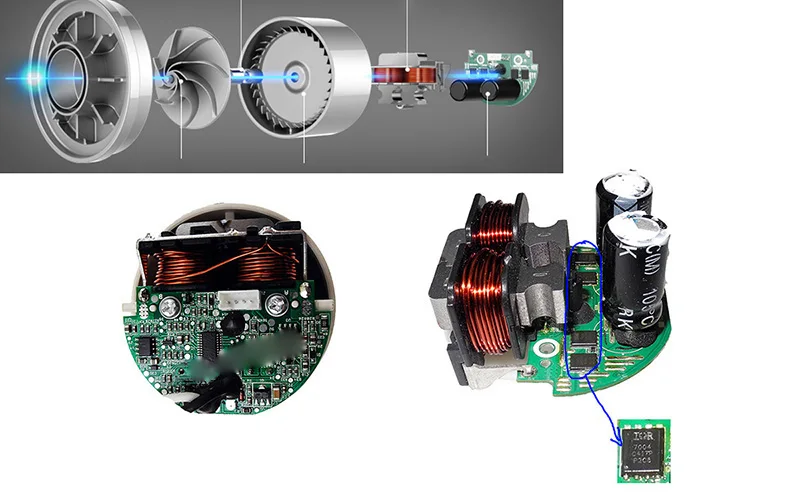 Они представляют собой класс, отличный от двигателей переменного тока, которые столь же продуктивны, но обеспечивают различные преимущества. Класс двигателей постоянного тока в целом разделен на двигатели постоянного тока с щеткой и бесщеточные двигатели постоянного тока, и эта статья поможет тем, кто хочет понять, что отличает один двигатель постоянного тока от другого. Основные принципы, лежащие в основе обоих типов двигателей постоянного тока, будут объяснены, а затем сравнены, чтобы показать, где каждая машина работает лучше всего в промышленности.
Они представляют собой класс, отличный от двигателей переменного тока, которые столь же продуктивны, но обеспечивают различные преимущества. Класс двигателей постоянного тока в целом разделен на двигатели постоянного тока с щеткой и бесщеточные двигатели постоянного тока, и эта статья поможет тем, кто хочет понять, что отличает один двигатель постоянного тока от другого. Основные принципы, лежащие в основе обоих типов двигателей постоянного тока, будут объяснены, а затем сравнены, чтобы показать, где каждая машина работает лучше всего в промышленности.
Щеточный двигатель
🔸 Щеточные Двигатели
Почищенные Щеткой Двигатели постоянного тока (часто называемые просто “щеточными двигателями”) являются одними из старейших электродвигателей и используют постоянный ток с механической коммутацией для выработки механической энергии.
Эти двигатели, как следует из их названия, используют щетки для подключения источника постоянного тока к роторному узлу, который является компонентом двигателя, содержащим якорь, коллекторные кольца и выходной вал.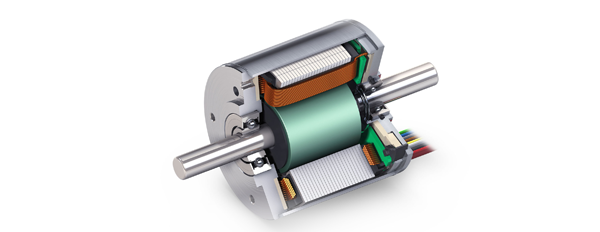 Статор или внешний корпус двигателя содержит поле постоянного магнита, создаваемое либо постоянным магнитом, либо какой-либо неподвижной катушкой электромагнита. Постоянное магнитное поле имеет полюса (магнитные пары север — юг), и их линии магнитного поля непрерывно проходят через весь узел ротора. Этот узел питается, когда щетки зажимают кольца коллектора, который направляет ток через якорь и его обмотки. Когда ток проходит через эти катушки, якорь становится собственным электромагнитом и взаимодействует с постоянными полюсами поля статора. Поскольку узел ротора может свободно вращаться, создаваемое якорем поле, следовательно, будет отталкивать поле статора, вызывая вращение вала. Это вращение пропорционально токам возбуждения якоря и статора, и изменение этих токов приведет к различным выходным характеристикам.
Статор или внешний корпус двигателя содержит поле постоянного магнита, создаваемое либо постоянным магнитом, либо какой-либо неподвижной катушкой электромагнита. Постоянное магнитное поле имеет полюса (магнитные пары север — юг), и их линии магнитного поля непрерывно проходят через весь узел ротора. Этот узел питается, когда щетки зажимают кольца коллектора, который направляет ток через якорь и его обмотки. Когда ток проходит через эти катушки, якорь становится собственным электромагнитом и взаимодействует с постоянными полюсами поля статора. Поскольку узел ротора может свободно вращаться, создаваемое якорем поле, следовательно, будет отталкивать поле статора, вызывая вращение вала. Это вращение пропорционально токам возбуждения якоря и статора, и изменение этих токов приведет к различным выходным характеристикам.
Бесщеточный двигатель
❌ Недостатки щеточных двигателей
🔴 Принцип работы бесщеточных двигателей такой же, как у двигателей со щетками (управление переключением с использованием обратной связи по положению внутреннего вала), но их общая конструкция отличается. Конструкция бесщеточных блоков снижает внутреннее сопротивление и помогает рассеивать тепло, выделяемое в катушках статора. Таким образом, эффективность повышается, поскольку тепло катушек может рассеиваться более эффективно благодаря гораздо большему корпусу стационарного двигателя.
Конструкция бесщеточных блоков снижает внутреннее сопротивление и помогает рассеивать тепло, выделяемое в катушках статора. Таким образом, эффективность повышается, поскольку тепло катушек может рассеиваться более эффективно благодаря гораздо большему корпусу стационарного двигателя.
🔴 Хотя щеточные двигатели недороги, надежны и имеют высокий крутящий момент или коэффициент инерции, они также имеют ряд недостатков.
Эти компоненты со временем изнашиваются, образуя пыль. Этот тип двигателя требует регулярного технического обслуживания для очистки или замены щеток.
Они также обладают низкой теплоотдачей из-за ограничений ротора, высокой инерции ротора, низкой максимальной скорости и электромагнитных помех (EMI) из-за образования дуги на щетках.
🔴 В отличие от щеточного двигателя, постоянный магнит на бесщеточном блоке установлен на роторе. Статор выполнен из рифленой прокатанной стали и содержит обмотки катушки. С другой стороны, щеточные устройства требуют небольшого количества внешних компонентов или вообще не требуют их, и поэтому хорошо работают в ограничительных условиях.
✔️ Плюсы щеточных двигателей
🟢 Щеточные двигатели также легко настраиваются. Вы можете изменить их, чтобы получить точную скорость, которую вы хотите, с помощью используемого напряжения.
🟢 По сравнению с бесщеточными двигателями, щеточный двигатель отлично подходит для начинающих, так как их цены значительно более доступны.
Бесщеточный двигатель в аккумуляторном инструменте
🔸 Бесщеточные двигатели
Бесщеточный двигатель использует постоянный магнит в качестве ротора. Он использует трехфазные приводные катушки и специализированный датчик, который отслеживает положение ротора. И когда датчик отслеживает положение ротора, он посылает опорные сигналы контроллеру. Контроллер, в свою очередь, активирует катушки упорядоченным образом – по одной фазе за раз. Главное отличие состоит в том, что здесь нет коммутатора и – что удивительно – нет щеток. Вместо этого бесщеточный двигатель имеет ротор, прикрепленный неодимовыми магнитами, и стальной корпус с обмотками и набором подшипников. Датчики встроены для изменения выходного сигнала – правильно установленный он будет поддерживать высокую точность и производительность нашего устройства.
Датчики встроены для изменения выходного сигнала – правильно установленный он будет поддерживать высокую точность и производительность нашего устройства.
❌ Недостатки бесщеточных двигателей
Как и во всех других устройствах, бесщеточные двигатели постоянного тока также имеют несколько недостатков по сравнению с другими двигателями. Поскольку бесщеточный двигатель постоянного тока во многих случаях превосходит щеточный двигатель постоянного тока, однако бесщеточный двигатель постоянного тока также имеет несколько недостатков, которые
обсуждаются ниже:
🔴 Стоимость бесщеточного двигателя постоянного тока сравнительно выше по сравнению с щеточным двигателем постоянного тока, а электронный контроллер также увеличивает стоимость общей настройки, так как в традиционном двигателе используется недорогая механическая коммутационная установка с использованием щеток.
🔴 Когда бесщеточный двигатель постоянного тока работает на низкой скорости, во время вращения на низкой скорости возникают небольшие вибрации.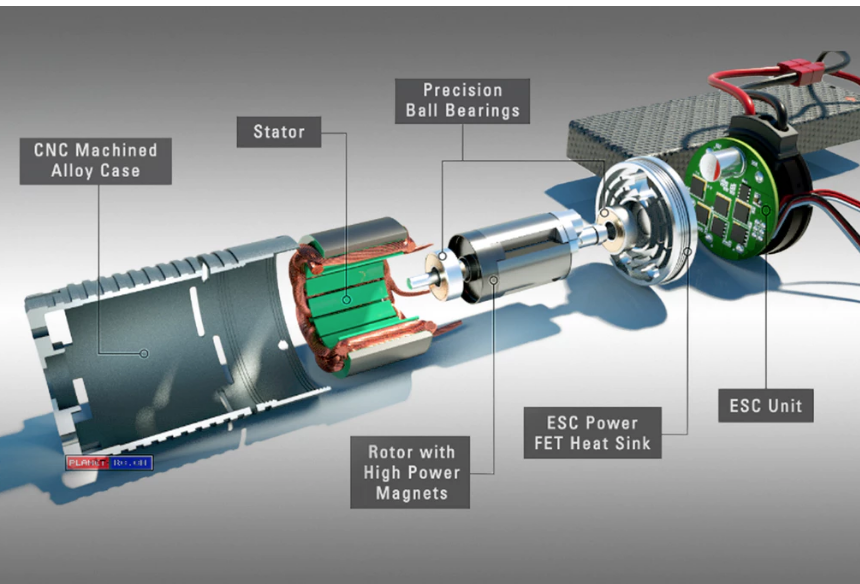 Однако вибрации уменьшаются на высокой скорости.
Однако вибрации уменьшаются на высокой скорости.
🔴 Короче говоря, бесщеточный двигатель постоянного тока имеет много преимуществ перед традиционными щеточными двигателями постоянного тока, такими как низкие затраты на техническое обслуживание и менее частые требования к техническому обслуживанию. Они также
✔️ Плюсы бесщеточных двигателей
🟢 Бесщеточные двигатели быстро не изнашиваются, и они прослужат долго, часто дольше, чем другие части радиоуправляемого автомобиля. У них нет щеток внутри, и именно поэтому они имеют гораздо больший срок службы. Кроме того, поскольку у них нет щеток, бесщеточный двигатель потребует меньшего обслуживания, будет иметь меньше проблем и в долгосрочной перспективе обойдется вам дешевле.
🟢 В бесщеточном двигателе нет щеток для чистки или замены, поэтому вам нужно только поддерживать подшипник, который нуждается в периодической смазке для контроля.
🟢 Бесщеточные двигатели часто могут работать в течение пяти-шести лет без каких-либо проблем! Это намного больше, чем вы могли бы ожидать от щеточного двигателя.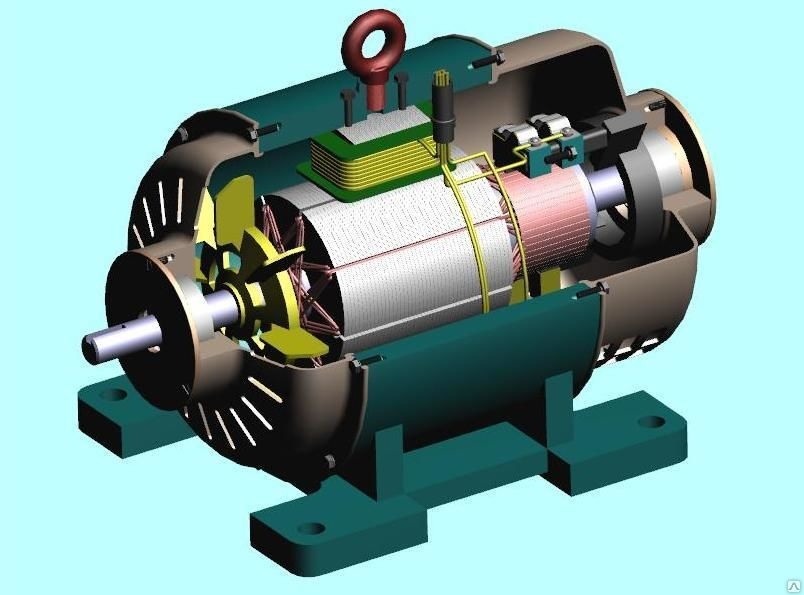 Вес и размеры двигателя относительно меньше и легче
Вес и размеры двигателя относительно меньше и легче
. Это не является бременем для вашего автомобиля, поэтому оно также может значительно повысить вашу скорость и управляемость.
🔰 Щеточные и бесщеточные двигатели: Почему дополнительные расходы?
Благодаря бесщеточной технологии ротор состоит из магнитов и статора катушек, которые попеременно заряжаются положительно или отрицательно.Таким образом, полюса притягиваются и отталкиваются, позволяя двигателю вращаться. Преимущество заключается в том, что между ротором и статором отсутствует физический контакт. Энергия передается от одного к другому через магнетизм между электромагнитами.
В обычном электродвигателе ротор (вращающаяся часть машины) приводится в движение внутри статора (неподвижная часть). Оба соединены электрическим соединением: коллектором или коллектором, который контактирует с небольшими угольными щетками.
Приводимый в действие постоянным током, двигатель работает с переменным током, вырабатываемым электронной картой, которая преобразует постоянный ток в трехфазную переменную частоту.
Таким образом, катушки подаются попеременно для создания вращающегося поля и, следовательно, вращения.
Электронный модуль, встроенный в двигатель или в корпус, непрерывно регулирует ток, чтобы двигатель работал с максимальной эффективностью.
Это повышает общую производительность и, таким образом, обеспечивает реальное соотношение цены и качества.
Товары из категорий🛠
🔰 Где используются щеточные и бесщеточные двигатели
Как мы уже говорили ранее, бесщеточный двигатель набирает популярность по сравнению с щеточным двигателем. Оба двигателя могут быть найдены в широком спектре применений. Щеточные двигатели постоянного тока по-прежнему часто используются в бытовой технике и автомобилях. Они также сохраняют сильную промышленную нишу благодаря своей способности изменять соотношение крутящего момента к скорости — уникальное свойство для них.
Щеточный или бесщеточный электродвигатель?
При такой популярности это неудивительно.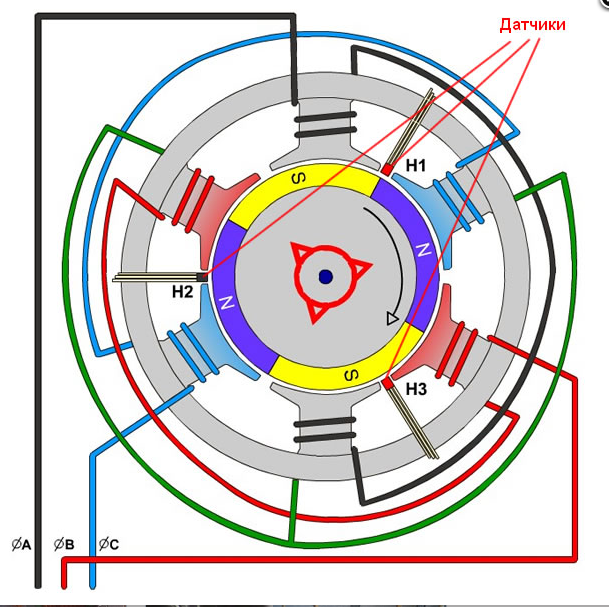 Бесщеточный двигатель работает дольше и потребляет меньше электроэнергии. Он ломается реже – щеток нет, поэтому они не изнашиваются. И это самая распространенная причина повреждения электроинструментов. Он меньше и легче, чем коллекторные, а также более мощный. Из-за этого он обеспечивает лучший крутящий момент. Если инструмент оснащен двигателем такого типа, обычно легко найти информацию о нем, а в случае щеточных двигателей многие производители просто опускают это упоминание.
Бесщеточный двигатель работает дольше и потребляет меньше электроэнергии. Он ломается реже – щеток нет, поэтому они не изнашиваются. И это самая распространенная причина повреждения электроинструментов. Он меньше и легче, чем коллекторные, а также более мощный. Из-за этого он обеспечивает лучший крутящий момент. Если инструмент оснащен двигателем такого типа, обычно легко найти информацию о нем, а в случае щеточных двигателей многие производители просто опускают это упоминание.
Благодаря такой надежности и долговечности бесщеточные двигатели постоянного тока нашли множество применений: производство, вычислительная техника и многое другое. Они используются в электромобилях нового поколения и все большем количестве электроинструментов нового поколения – отверток, дрелей, перфораторов. Они также встречаются в роботах, дронах и радиоуправляемых автомобилях, как игрушечных, любительских, так и профессиональных.
🔰 Щеточный или бесщеточный?
Таким образом, бесщеточные двигатели могут быть более мощными, чем ваши традиционные аккумуляторные инструменты с щеткой. Беспроводные приборы, использующие бесщеточный электронный двигатель, более эффективны и интеллектуальны в том, как двигатель регулирует расход энергии аккумулятора. Этот уровень интеллекта и эффективности приводит к:
Беспроводные приборы, использующие бесщеточный электронный двигатель, более эффективны и интеллектуальны в том, как двигатель регулирует расход энергии аккумулятора. Этот уровень интеллекта и эффективности приводит к:
- Меньший объем технического обслуживания и более длительный срок службы — благодаря отсутствию угольных щеток
- Больше мощности — меньше ограничений в двигателе, который расходует энергию
- Более длительное время работы и меньшая зарядка аккумулятора — благодаря эффективному использованию энергии.
💥 Вам понравилась эта запись в блоге? Почему бы не показать нам немного любви и не поделиться ею! Или прочитайте другие наши записи в блоге, которые полны интересной и информативной информации.
FAQ❓
🔘 Используется ли бесщеточный двигатель в аккумуляторной дрели?
Да, у этого типа дрели меньший вес
🔘 Бесщеточный двигатель чаще встречается в аккумуляторных инструментах?
В настоящее время они более распространены
🔘 Бесщеточный мотор дороже щеточного?
Да бесщеточный мотор дороже
Заключение🧾
бесщеточные двигатели могут быть более мощными, чем ваши традиционные аккумуляторные инструменты с щеткой.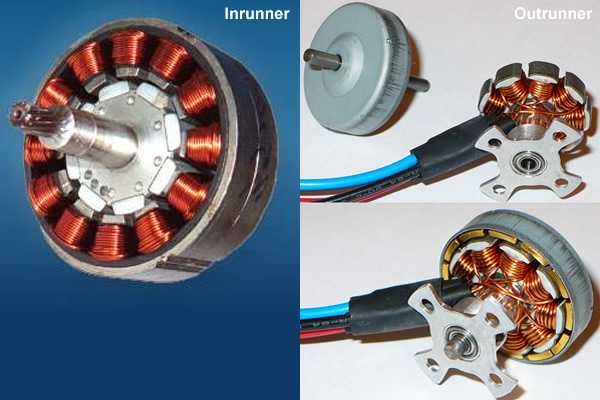 Беспроводные приборы, использующие бесщеточный электронный двигатель, более эффективны и интеллектуальны в том, как двигатель регулирует расход энергии аккумулятора.
Беспроводные приборы, использующие бесщеточный электронный двигатель, более эффективны и интеллектуальны в том, как двигатель регулирует расход энергии аккумулятора.
Бесщеточные двигатели | Корпорация Nidec
Технические возможности Nidec
Бесщеточные двигатели постоянного тока
отличаются сниженным энергопотреблением, длительным сроком службы, низким уровнем шума, компактными размерами и малым весом.
Nidec является мировым лидером в разработке и производстве этих высокопроизводительных двигателей.
Щёточные двигатели постоянного тока обладают различными преимуществами, такими как высокая эффективность, возможность уменьшения габаритов, возможность работы от электроэнергии и низкие производственные затраты. Однако эти двигатели имеют ряд недостатков, таких как шум из-за трения щеток, образование искр и электрических помех, а также ограниченный срок службы из-за износа щеток. Разработка бесщеточного двигателя постоянного тока решила все эти проблемы.
В бесщеточном двигателе постоянного тока ротор, сделанный из постоянного магнита, приводится в движение магнитной силой цепи обмотки статора. В то время как щеточный двигатель постоянного тока использует щетку и коммутатор для переключения тока, бесщеточный двигатель постоянного тока использует датчик и электронную схему для переключения тока. Разработка этого двигателя стала возможной благодаря развитию технологий полупроводников и периферийных устройств. Этот двигатель имеет выгодные характеристики двигателей постоянного тока (ток и напряжение соответственно пропорциональны крутящему моменту и скорости вращения) и двигателей переменного тока (бесщеточная конструкция). Особенности бесщеточного двигателя постоянного тока включают компактный размер, высокую мощность, длительный срок службы и отсутствие искр и шума, и он используется в широком диапазоне приложений от ПК до бытовой техники.
Характеристики и классификация бесщеточных двигателей постоянного тока
Бесщеточный двигатель постоянного тока «вращает свой магнит».
Ротор, сделанный из магнита, вращается магнитными полями, которые создаются током, протекающим через обмотки статора. Ток переключается датчиком и электронной схемой.
Тип внешнего ротора (ротор снаружи статора)
- Преимущества
- Легко получить большой крутящий момент.
- Скорость стабильна при постоянном вращении.
- Недостатки
- Ротор большой (движение медленное).
- Внешний ротор требует соответствующих мер безопасности.
Тип внутреннего ротора (ротор находится внутри статора)
- Преимущества
- Ротор маленький и может быстро реагировать.
- Змеевик расположен снаружи и уровень отвода тепла высокий.
- Недостатки
- Трудно получить большой крутящий момент.
- Магниты могут быть повреждены центробежной силой.
Таблица сравнения типов двигателей
Бесщеточные двигатели постоянного тока
имеют много преимуществ (в частности, в области эффективности).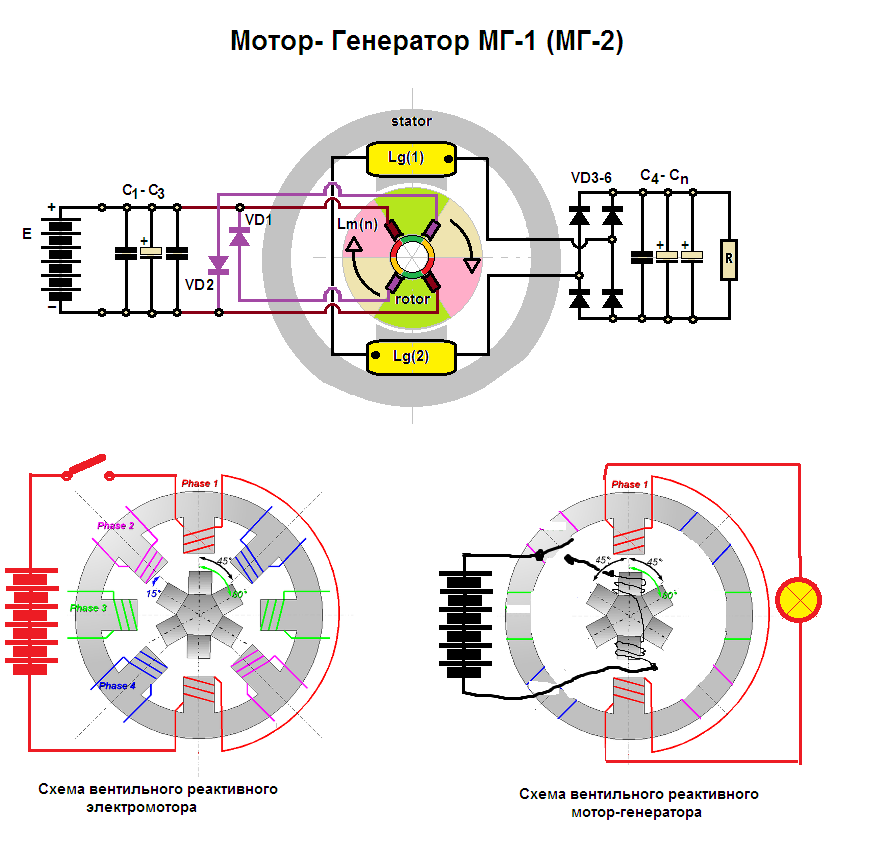
По сравнению с другими типами двигателей, бесщеточный двигатель постоянного тока имеет много преимуществ, таких как компактный размер, высокая мощность, низкий уровень вибрации, низкий уровень шума и длительный срок службы.
| Двигатель переменного тока | Универсальный двигатель | Щеточные двигатели постоянного тока | Бесщеточный двигатель постоянного тока | Шаговый двигатель | Серводвигатель | ||||
|---|---|---|---|---|---|---|---|---|---|
| Однофазный | Трехфазный (индукционный) | Трехфазный (синхронный) | Сервер переменного тока | Сервопривод постоянного тока | |||||
| Тип питания | АС | AC/DC | DC | DC (включая драйвер)/драйвер | Драйверы | Драйверы | Драйверы | ||
| Эффективность | 40-60% | 60-70% | 70-80% | 50-60% | 60-80% | 80%- | 60-70% | 50-80% | 60-80% |
| Размер (тот же выход) | Большой | Средний или большой | Большой | Маленький | Маленький | Промежуточный уровень | Маленький или средний | Маленький | |
| Шум | Маленький | Большой | Большой | Маленький | Промежуточный уровень | Маленький | Большой | ||
| Диапазон скоростей | Узкий | Широкий | Промежуточный уровень | Широкий | Широкий | Широкий | Промежуточный уровень | Узкий | |
| Ответ | Медленный | Медленный | Промежуточный уровень | Промежуточный уровень | Промежуточный уровень | Быстро | |||
| Срок службы | Длинный | Короткий | Короткий | Длинный | Длинный | Короткий | |||
| Цена | Низкий | Промежуточный уровень | Низкий | Низкий | Средний или высокий уровень | Промежуточный уровень | Высокий | ||
| Приложения | Стиральные машины Воздуходувки Пылесосы Насосы | Краны Конвейеры Кондиционеры Промышленное оборудование | Компрессоры Посудомоечные машины Стиральные машины | Пылесосы Электроинструменты Соковыжималки | Электрические игрушки Электрические инструменты Автомобильные электрические компоненты Мелкая бытовая техника | Кондиционеры Посудомоечные машины Стиральные машины Мелкая бытовая техника | Роботы Мелкая бытовая техника Оборудование для кондиционирования воздуха | Конвейеры Роботы Станки | Принтеры Плоттеры Рабочие машины |
| Решение | Ориентированная на стоимость | Универсальность | Ориентированная на стоимость | Ориентированная на стоимость | Эффективность Универсальность | Универсальность | Ориентирован на производительность | ||
Компания Nidec имеет значительный опыт в области малых бесщеточных двигателей постоянного тока. Компании принадлежит 80 % мирового рынка шпиндельных двигателей жестких дисков, 60 % мирового рынка двигателей DVD и других оптических приводов и 40 % мирового рынка двигателей вентиляторов. Nidec работает в области малогабаритных прецизионных двигателей, в которой произошел самый быстрый переход на бесщеточные двигатели. Нам удалось наладить массовое производство бесколлекторных двигателей постоянного тока раньше, чем у наших конкурентов, и занять лидирующие позиции на рынке. Кроме того, мы удерживаем позицию № 1 в мире, постоянно внедряя новые технологии, такие как первое в отрасли применение FDB (гидродинамических подшипников), которые удовлетворяют потребности все более точных жестких дисков, а также собственное производство инструментов проектирования и моделирования.
Компании принадлежит 80 % мирового рынка шпиндельных двигателей жестких дисков, 60 % мирового рынка двигателей DVD и других оптических приводов и 40 % мирового рынка двигателей вентиляторов. Nidec работает в области малогабаритных прецизионных двигателей, в которой произошел самый быстрый переход на бесщеточные двигатели. Нам удалось наладить массовое производство бесколлекторных двигателей постоянного тока раньше, чем у наших конкурентов, и занять лидирующие позиции на рынке. Кроме того, мы удерживаем позицию № 1 в мире, постоянно внедряя новые технологии, такие как первое в отрасли применение FDB (гидродинамических подшипников), которые удовлетворяют потребности все более точных жестких дисков, а также собственное производство инструментов проектирования и моделирования.
Наиболее плодотворным рынком с точки зрения применения бесколлекторных двигателей постоянного тока становится рынок автомобильных двигателей. Как свидетельствует система гидроусилителя руля, уровень расхода топлива которой можно улучшить на 3-5%, если заменить гидравлическую систему на электрическую, эффект энергосбережения за счет использования электроэнергетических систем очень высок. В различных местах все больше и больше гидравлических систем заменяются двигателями. В частности, бесщеточный двигатель постоянного тока играет ведущую роль в замене функций, где требуется управляемость, а также в местах, где часто используются детали и, следовательно, требуются детали с длительным сроком службы. Основная область применения после ГУР – компрессорные двигатели кондиционеров. Кроме того, тяговые двигатели для электромобилей (EV) являются перспективной областью для бесщеточных двигателей постоянного тока. Поскольку система работает от батареи с ограниченной мощностью, двигатель должен быть высокоэффективным и компактным, чтобы его можно было установить в ограниченном пространстве. Благодаря опыту, который мы накопили в области малых прецизионных двигателей, мы стремимся стать компанией № 1 в мире, работающей в области автомобильных двигателей.
В различных местах все больше и больше гидравлических систем заменяются двигателями. В частности, бесщеточный двигатель постоянного тока играет ведущую роль в замене функций, где требуется управляемость, а также в местах, где часто используются детали и, следовательно, требуются детали с длительным сроком службы. Основная область применения после ГУР – компрессорные двигатели кондиционеров. Кроме того, тяговые двигатели для электромобилей (EV) являются перспективной областью для бесщеточных двигателей постоянного тока. Поскольку система работает от батареи с ограниченной мощностью, двигатель должен быть высокоэффективным и компактным, чтобы его можно было установить в ограниченном пространстве. Благодаря опыту, который мы накопили в области малых прецизионных двигателей, мы стремимся стать компанией № 1 в мире, работающей в области автомобильных двигателей.
Рынок автомобильных компонентов значительно расширяется как область применения бесщеточных двигателей постоянного тока.
Статьи и колонки, связанные с этим продуктом
- Технологии и практические примеры Технические возможности Nidec Решения, основанные на бесколлекторных двигателях постоянного тока
Обзор бесколлекторных двигателей постоянного тока
для ракетных исполнительных систем следующего поколения Краткое описание
по
Чарльз Фрик
Скачать PDF
Системы боеприпасов быстро становятся такими же ограниченными по стоимости, как и другие области техники, поскольку затраты растут, а клиенты требуют продуктов меньшего размера и большей дальности. Чтобы эффективно управлять этими боеприпасами в полете, небольшая система управления (CAS) выполняет небольшие точные регулировки для размещения стабилизаторов и регулировки воздушного потока над корпусом. Традиционно эти системы были пневматическими или приводились в действие щеточным двигателем постоянного тока с редуктором, но современные достижения в области электроприводов, включая бесщеточные двигатели постоянного тока (BLDC), позволили создать меньшие, легкие, дешевые и более эффективные конструкции CAS. Однако это происходит за счет дополнительной сложности системы для управления тремя фазами BLDC.
Чтобы эффективно управлять этими боеприпасами в полете, небольшая система управления (CAS) выполняет небольшие точные регулировки для размещения стабилизаторов и регулировки воздушного потока над корпусом. Традиционно эти системы были пневматическими или приводились в действие щеточным двигателем постоянного тока с редуктором, но современные достижения в области электроприводов, включая бесщеточные двигатели постоянного тока (BLDC), позволили создать меньшие, легкие, дешевые и более эффективные конструкции CAS. Однако это происходит за счет дополнительной сложности системы для управления тремя фазами BLDC.
Дополнительная сложность возникает из ряда источников. Во-первых, в то время как для традиционного коллекторного двигателя постоянного тока требуется только один H-мост, для BLDC требуются три отдельные пары полевых МОП-транзисторов для управления фазами. Это добавляет небольшую стоимость и требует дополнительной площади земли на печатной плате. При управлении этими полевыми МОП-транзисторами необходимо соблюдать осторожность, чтобы избежать протекания тока, который может вывести из строя полевые МОП-транзисторы, если одновременно активируются верхние и нижние транзисторы. Особое внимание следует уделить мертвому времени, вставляемому между верхней и нижней линиями возбуждения для широтно-импульсной модуляции (ШИМ).
Особое внимание следует уделить мертвому времени, вставляемому между верхней и нижней линиями возбуждения для широтно-импульсной модуляции (ШИМ).
С точки зрения программного обеспечения, обычным коллекторным двигателем можно управлять с помощью простого контура ПИД-регулятора, в то время как для BLDC потребуются более сложные контуры и стратегии коммутации, обычно измеряющие токи обмотки, фазные напряжения, угол ротора и скорость.
Строительство BLDC
BLDC представляет собой набор электромагнитов на статоре с постоянными магнитами, прикрепленными к подвижному ротору. Двигатель может быть либо инраннерным (магниты внутри катушек), либо аутраннерным (магниты снаружи катушек). На рисунке 1 показаны инраннер и аутраннер BLDC. В обоих случаях три фазы проводов (U, V, W или A, B, C) наматываются на зубья статора. Эти обмотки последовательно запитываются, чтобы притягивать и отталкивать постоянные магниты (красный/синий).
Рисунок 1. Inrunner против Outrunner.
Стандартный микропроцессор или DSP не имеют силы тока привода для адекватного питания катушек напрямую, поэтому каскад инвертора мощности, состоящий из полевых МОП-транзисторов (по два на фазу), обычно используется для преобразования привода ШИМ из интерфейса управления в требуемое высокое напряжение. привод для мотора.
Обычно в трехфазном инверторе используется шесть N-канальных МОП-транзисторов (см. верхнюю часть рис. 2), которые создают состояния переключения, показанные в нижней части рис. 2. Несколько состояний переключения не показаны: 001, 010. , 011 и 101. 1 означает, что один из трех верхних МОП-транзисторов включен. Эти состояния отображаются в пространстве состояний, как показано шестью секторами на рис. 3. При включении и выключении переключателей напряжение, подаваемое на обмотки, может достигать максимума 2/3 × В ДК . Естественным расширением этой стратегии является применение ШИМ к каждой паре МОП-транзисторов. Изменяя скважность сигналов ШИМ, генерируемое напряжение в обмотках может создавать широкий диапазон напряжений в зависимости от разрешения системы генерации ШИМ.
Рис. 2. Трехфазный инвертор и состояния переключения.
Рисунок 3. Переключение представлений в пространстве состояний и разделение на Сектор I по Сектор VI.
Без ШИМ вполне естественной стратегией коммутации является просто последовательное питание каждой пары обмоток (то есть блочная коммутация или шестиступенчатая коммутация). Для этой стратегии одна или две фазы подключаются к высокому уровню, а остальные обмотки — к низкому. При последовательном включении фаз магниты на роторе притягиваются к каждой фазе, и ротор начинает вращаться. Чтобы определить, на какие фазы подавать питание, три датчика Холла обычно устанавливаются на статоре с разницей в 60 электрических градусов друг от друга. Датчики Холла обнаруживают каждый из магнитов ротора и генерируют 3-битную цифровую последовательность, которая используется для определения следующей области коммутации. Хотя эта стратегия хорошо работает для недорогих систем управления двигателем, она страдает от пульсаций крутящего момента на низких скоростях.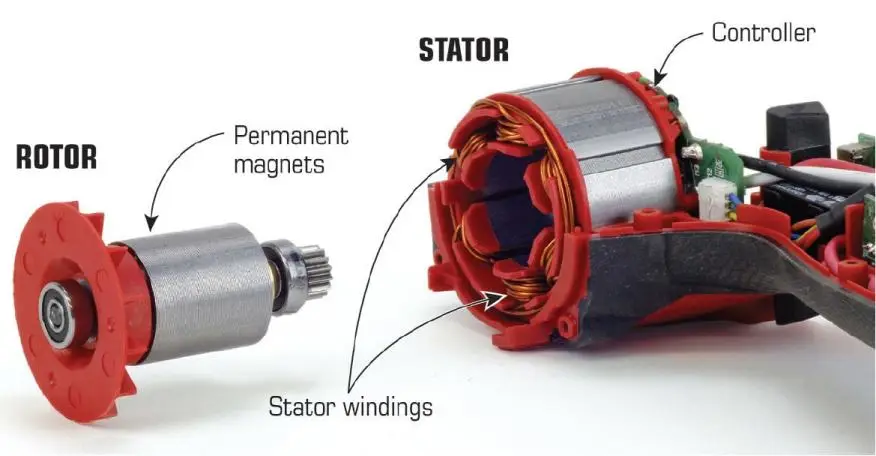 Кроме того, эта пульсация крутящего момента вызывает акустический шум и вносит ошибку позиционирования, если двигатель используется для позиционирования/сервоприводов. 1
Кроме того, эта пульсация крутящего момента вызывает акустический шум и вносит ошибку позиционирования, если двигатель используется для позиционирования/сервоприводов. 1
Синусоидальная коммутация работает по принципу выравнивания токов статора с потоком статора в BLDC. BLDC движется за счет трапециевидного тока через обмотки. Каждый из этих токов должен быть сдвинут по фазе на 120°. Синхронный двигатель с постоянными магнитами (PMSM) похож на BLDC, но требует синусоидальных токов для привода. Блок-схема привода СДПМ представлена на рис. 4. Простое управление скоростью достигается с помощью датчика скорости или оценки на основе датчика положения вала и параметров двигателя. Синусоидальный привод особенно хорошо работает на низких скоростях, но выходит из строя на более высоких скоростях, поскольку электрическая частота необходимой синусоидальной волны также должна увеличиваться со скоростью. На более высоких скоростях двигателю требуются более высокие крутящие моменты, что приводит к отставанию фазных токов. 2 Для надлежащего управления на более высоких скоростях обычно необходимо вводить фазовое опережение, чтобы поддерживать правильное выравнивание векторов крутящего момента и магнитного потока.
2 Для надлежащего управления на более высоких скоростях обычно необходимо вводить фазовое опережение, чтобы поддерживать правильное выравнивание векторов крутящего момента и магнитного потока.
Рис. 4. Синусоидальный привод СДПМ.
Для преодоления этой проблемы может быть реализована более совершенная схема управления, называемая полевым управлением (FOC). Как и в случае с другими стратегиями коммутации, FOC может быть реализован без датчика с оценкой положения и скорости на основе противо-ЭДС, генерируемой обмотками, или с датчиками положения и тока. В основе ВОК лежит управление векторами крутящего момента и потока, поступающими в обмотки двигателя. Генерация этих векторов исходит из желаемой скорости, подаваемой на двигатель.
Используя электрические и механические константы двигателя (момент инерции, коэффициент трения, индуктивность и сопротивление обмоток статора и постоянная противо-ЭДС), контуры ПИ на рис. 5 преобразуют желаемую скорость в величины постоянного тока. Для управления электрическим циклом двигателя эти величины необходимо преобразовать в систему отсчета ротора (рис. 6) для получения V α и V β с помощью преобразования Парка. Следующим шагом в FOC является преобразование V α и V β в значения ШИМ, отправляемые на блок инвертора ШИМ. Обычно для этого процесса используется либо схема синусоидальной модуляции (SPWM), либо схема модуляции пространственного вектора (SVPWM или SVM).
Для управления электрическим циклом двигателя эти величины необходимо преобразовать в систему отсчета ротора (рис. 6) для получения V α и V β с помощью преобразования Парка. Следующим шагом в FOC является преобразование V α и V β в значения ШИМ, отправляемые на блок инвертора ШИМ. Обычно для этого процесса используется либо схема синусоидальной модуляции (SPWM), либо схема модуляции пространственного вектора (SVPWM или SVM).
Рис. 5. Блок-схема ВОК.
Рис. 6. Преобразование параметров управления в ВОК.
Как упоминалось ранее, управляя переключением МОП-транзисторов внутри силового инвертора, можно создать представление пространственного вектора, как на рис. 3. Пространство между соседними единичными векторами кодируется для создания сектора от 1 до 6, соответствующего шесть коммутационных секторов электрического цикла коммутации. Крупный план сектора 1 с рисунка 3 показан на рисунке 7. Вектор напряжения V REF состоит из векторов напряжения V α и V β , а угол θ представляет собой арктангенс V d , деленный на V q . 3 На рисунке 7 показано, что V REF может быть получен с использованием двух смежных единичных векторов (V 1 и V 2 ) и пребывания в каждом состоянии определенного времени (соответствующего рабочему циклу). Этот рабочий цикл можно рассчитать с помощью уравнений, аналогичных тем, которые получены из векторной математики (см. рис. 8).
3 На рисунке 7 показано, что V REF может быть получен с использованием двух смежных единичных векторов (V 1 и V 2 ) и пребывания в каждом состоянии определенного времени (соответствующего рабочему циклу). Этот рабочий цикл можно рассчитать с помощью уравнений, аналогичных тем, которые получены из векторной математики (см. рис. 8).
Рис. 7. Сектор 1 пространства состояний.
Расчет U, V, W по векторному уравнению
Рисунок 8. Время секторов из опорных векторов.
Из уравнений на рис. 7 время ШИМ можно найти, используя нормализованное время 1,0 (равное полному 100% рабочему циклу) и вычитая T n и T n+1 . Сектор можно определить с помощью дополнительных расчетов, как показано на рисунке 9.
Рисунок 9. Определение сектора.
После того, как рабочие циклы рассчитаны и отправлены в модуль PWM контроллера, достигается управление без обратной связи с использованием FOC.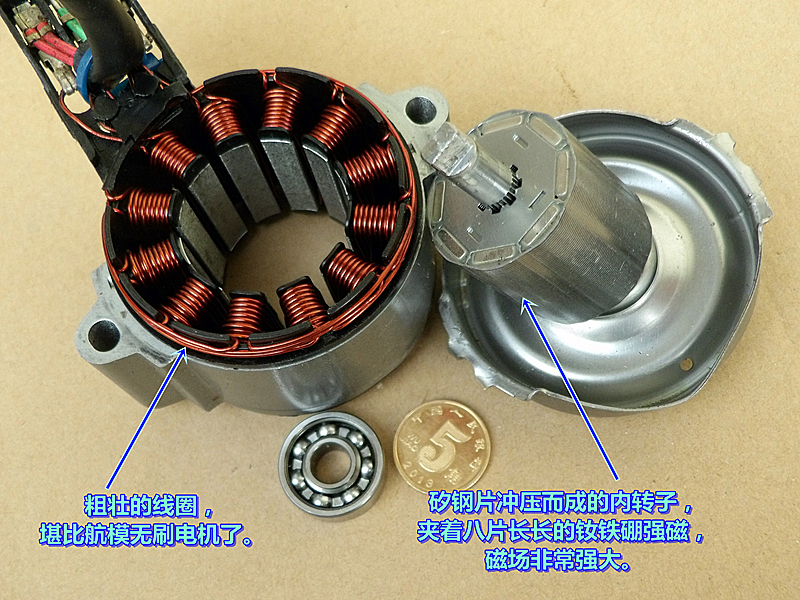 Теперь необходимо интегрировать обратную связь, чтобы обеспечить управление с обратной связью. Как показано на рис. 4, токи трех обмоток измеряются и преобразуются с использованием обратных преобразований Кларка и обратного преобразования Парка. Для измерения этих токов можно использовать несколько различных стратегий: шунтирование в соответствии с каждой фазной обмоткой, одиночный шунт нижнего конца между тремя нижними МОП-транзисторами и землей, фазовые шунты под каждым МОП-транзистором на землю или шунты на стороне высокого напряжения между каждым из них. верхний МОП-транзистор и V ДК . Если конструкция ограничена по стоимости, метод с использованием двух шунтов на одной линии с обмотками обеспечивает хорошее измерение, поскольку это обеспечивает прямой способ измерения тока двух обмоток напрямую. Третий ток можно рассчитать, используя закон тока Кирхгофа и сумму 0. Дополнительным преимуществом является то, что ток можно измерить в любой момент, а не только при включенных нижних или верхних полевых МОП-транзисторах.
Теперь необходимо интегрировать обратную связь, чтобы обеспечить управление с обратной связью. Как показано на рис. 4, токи трех обмоток измеряются и преобразуются с использованием обратных преобразований Кларка и обратного преобразования Парка. Для измерения этих токов можно использовать несколько различных стратегий: шунтирование в соответствии с каждой фазной обмоткой, одиночный шунт нижнего конца между тремя нижними МОП-транзисторами и землей, фазовые шунты под каждым МОП-транзистором на землю или шунты на стороне высокого напряжения между каждым из них. верхний МОП-транзистор и V ДК . Если конструкция ограничена по стоимости, метод с использованием двух шунтов на одной линии с обмотками обеспечивает хорошее измерение, поскольку это обеспечивает прямой способ измерения тока двух обмоток напрямую. Третий ток можно рассчитать, используя закон тока Кирхгофа и сумму 0. Дополнительным преимуществом является то, что ток можно измерить в любой момент, а не только при включенных нижних или верхних полевых МОП-транзисторах. После измерения этих токов их следует нормализовать в диапазоне [–1, +1], используя максимальный ток, измеряемый шунтирующей системой.
После измерения этих токов их следует нормализовать в диапазоне [–1, +1], используя максимальный ток, измеряемый шунтирующей системой.
Для определения положения и скорости можно использовать энкодеры (относительные или абсолютные), датчики Холла, резольверы или магнитные угловые датчики. Однако в зависимости от разрешения датчика могут потребоваться дополнительные схемы оценки положения и скорости. Независимо от технологии, измеренный угол должен быть преобразован в электрический угол, чтобы синхронизировать коммутацию с фактическим положением ротора и включить преобразования ротора. Угловая скорость также должна быть известна, но обычно она хранится в механической области, чтобы соответствовать желаемой входной скорости.
Зная фактическое положение и скорость ротора, можно выполнить обратное/обратное преобразование Парка и Кларка для преобразования фазных токов из системы отсчета неподвижного статора во вращающуюся систему отсчета в системе отсчета d, q. Контуры PI для результирующих членов ошибок тока и скорости создают векторы ошибок, которые затем возвращаются обратно в прямые преобразования Парка и Кларка, и процесс управления может повторяться.
Как быстро должен повториться этот процесс? Ответ зависит от характеристик двигателя. Частота ШИМ обычно выбирается вне слышимого диапазона (от 15 кГц до 30 кГц), чтобы двигатель не резонировал на слух. Затем FOC и необходимые контуры управления реализуются в подпрограмме обслуживания прерывания PWM, так что новые значения для PWM доступны для следующего цикла PWM. Это налагает жесткие временные ограничения на процедуру FOC, поскольку любое время, затраченное на обслуживание прерывания PWM, является временем, не затраченным на обслуживание других аспектов управляющего процессора (таких как последовательные интерфейсы для программ на базе ПК). При частоте ШИМ 30 кГц каждая ISR ШИМ составляет всего 33,3 мкс. Так что каждая микросекунда имеет значение! Необходимо соблюдать осторожность, чтобы свести к минимуму вычислительные затраты для синуса и косинуса и других вычислений с плавающей запятой. Как правило, предпочтительно, чтобы подпрограмма FOC занимала менее 50% доступного времени PWM ISR, чтобы процессор мог обслуживать другие периферийные устройства, такие как UART, для обслуживания менее важных задач, таких как изменение желаемой скорости или установка нового положения.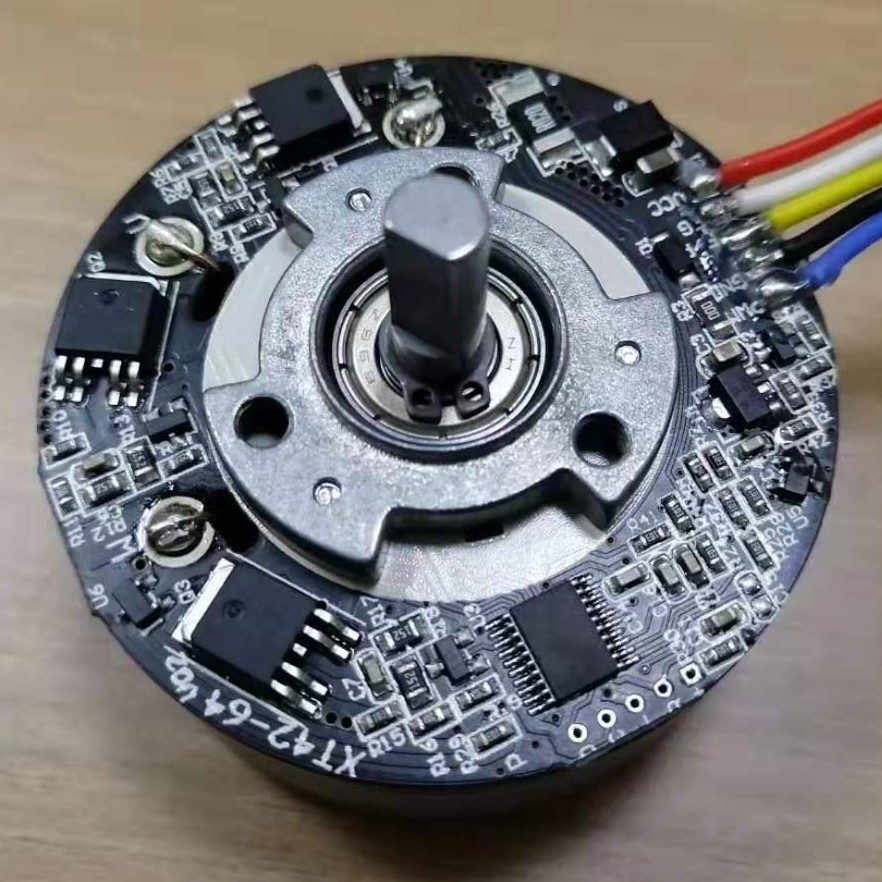
Отдельные компоненты
Учитывая и без того сложный характер реализации FOC, тщательный выбор компонентов может помочь свести к минимуму дополнительные проблемы системной интеграции. Analog Devices предлагает ряд компонентов для сигнальных цепей управления двигателем. Эти детали включают драйверы затворов, датчики абсолютного угла и эффекта Холла, датчики тока и изоляционные изделия.
Простую блок-схему компонентов сигнальной цепи управления двигателем можно увидеть на рисунке 10. На верхнем уровне положение и скорость вала BLDC определяются с помощью датчика угла ADA4571 AMR и преобразователя магнитного поля AD22151. Токи фазных обмоток измеряются с помощью встроенных шунтирующих резисторов, а усилители измерения тока AD8418 снимают синфазное напряжение ШИМ. 8-битный 18-разрядный АЦП LTC2345-18 преобразует 6-кратное аналоговое напряжение от датчиков в цифровую область для микроконтроллера. Микроконтроллер использует эти сигналы для расчета рабочего цикла ШИМ, который отправляется на аппаратные таймеры. Драйверы МОП-транзисторов LT1158 действуют как драйверы затворов для шести МОП-транзисторов силового инвертора.
Драйверы МОП-транзисторов LT1158 действуют как драйверы затворов для шести МОП-транзисторов силового инвертора.
Рис. 10. Блок-схема цепочки сигналов управления двигателем.
LT1158 — это интегрированный полумостовой N-канальный драйвер MOSFET. В то время как напряжение питания может варьироваться от 5 В до 30 В постоянного тока, логика формы входного сигнала ШИМ может принимать уровни ТТЛ или КМОП. Кроме того, один вход ШИМ преобразуется в высокий и низкий управляющие сигналы MOSFET, в то время как микросхема автоматически вставляет адаптивное мертвое время. Это означает, что частота ШИМ может изменяться динамически, а мертвое время автоматически вставляется для защиты полевых МОП-транзисторов от пробоя тока без необходимости внесения изменений в код или регистры таймера ШИМ.
Рис. 11. Драйвер двойного N-канального МОП-транзистора LT1158.
Встроенный анизотропный магниторезистивный (AMR) датчик ADA4571 способен измерять поворот на 180° с точностью до 0,5°. Этот датчик работает от одного источника питания от 2,7 В до 5 В и потребляет всего 7 мА с включенной температурной компенсацией. Выход этого датчика представляет собой две аналоговые синусоидальные волны (V SIN , V COS ) с центром около 2,5 В (питание 5 В). После оцифровки напряжений V SIN и V COS их можно преобразовать в угол по простой формуле:
Этот датчик работает от одного источника питания от 2,7 В до 5 В и потребляет всего 7 мА с включенной температурной компенсацией. Выход этого датчика представляет собой две аналоговые синусоидальные волны (V SIN , V COS ) с центром около 2,5 В (питание 5 В). После оцифровки напряжений V SIN и V COS их можно преобразовать в угол по простой формуле:
Рис. 12. Датчик ADA4571 AMR.
Для измерения абсолютного вращения на 360° ADA4571 можно комбинировать с датчиком магнитного поля с линейным выходом (эффект Холла), таким как AD22151. AD22151 предназначен для работы от одного источника питания 5 В и выдает напряжение, линейно пропорциональное магнитному полю, приложенному перпендикулярно корпусу. Во время нормальной работы устройство потребляет максимум 10 мА и может обнаруживать биполярные или униполярные поля с различной степенью усиления. Преимуществом этого датчика является аналоговое выходное напряжение, которое можно легко добавить в систему, уже измеряющую аналоговые величины, такие как выходы датчика тока или дополнительные аналоговые датчики угла.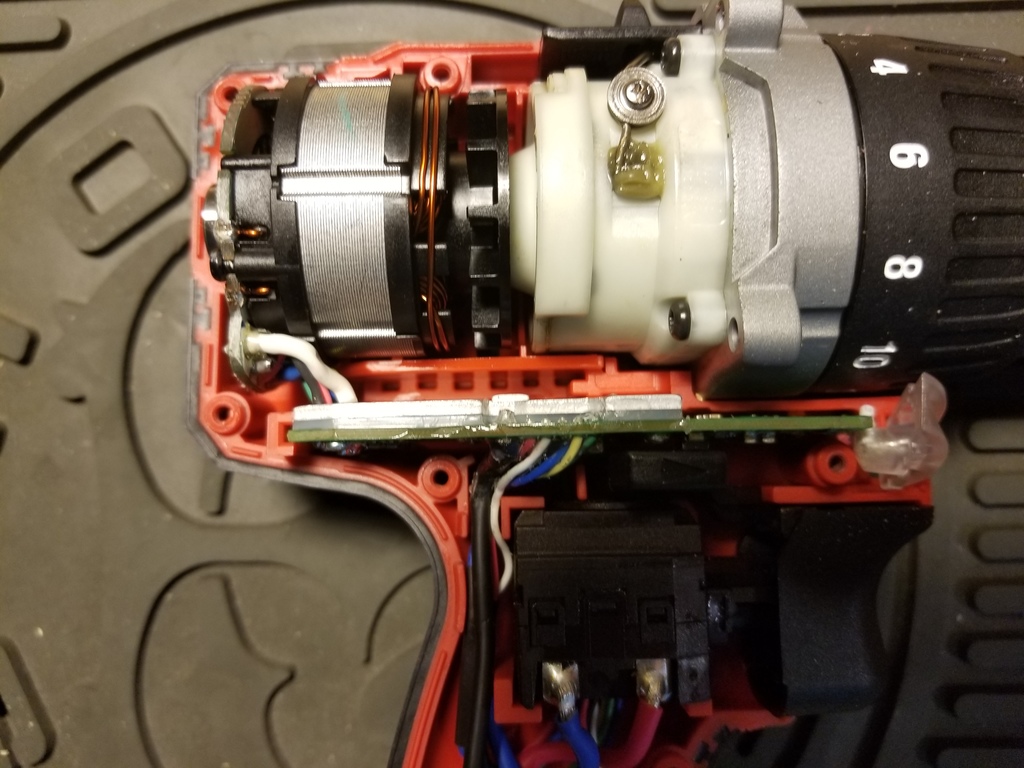 Поместив AD22151 перпендикулярно ADA4571, можно программно соединить выходные сигналы вместе, чтобы обеспечить определение 360-градусного движения диаметрального магнита, установленного на валу.
Поместив AD22151 перпендикулярно ADA4571, можно программно соединить выходные сигналы вместе, чтобы обеспечить определение 360-градусного движения диаметрального магнита, установленного на валу.
Наряду с датчиками угла, ВОК с датчиками требуют точного измерения фазных токов через BLDC. AD8418 — это двунаправленный усилитель для измерения тока с нулевым дрейфом, хорошо подходящий для этой задачи. Этот внешний шунтирующий усилитель работает с коэффициентом усиления 20 В/В по температуре с диапазоном подавления синфазного сигнала от –2 В до +70 В. Усилитель также воспринимает двунаправленные токи через шунт, что особенно полезно при измерении фазных токов для BLDC. Деталь рассчитана на работу с напряжением питания В S между 2,7 В и 5 В, с аналоговым выходным напряжением, сосредоточенным вокруг V S /2. Если питание выбрано для 5 В, выходное напряжение составляет около 2,5 В, как и в ADA4571.
Рисунок 13. Датчик тока AD8418.
Для датчиков с аналоговым выходом результаты должны быть преобразованы в цифровую форму. Несмотря на то, что существует множество АЦП, LTC2345 особенно подходит для управления двигателем благодаря 8 одновременным каналам дискретизации. Выборка синхронизируется с одним нарастающим фронтом на линии преобразования. Фазные токи и выходы датчика абсолютного угла затем могут быть синхронизированы с одним и тем же моментом времени во время ШИМ с выравниванием по центру. Работа с одним источником питания 5 В упрощает конструкцию источника питания, при этом потребляя менее 20 мА. Отдельное выходное напряжение цифровой логики позволяет LTC2345 взаимодействовать с микроконтроллерами, процессорами или FPGA с более низким напряжением. Благодаря гибкому характеру диапазонов аналоговых входов смещение 2,5 В датчиков положения и тока может быть автоматически удалено аппаратно с помощью аналоговых входных каналов (IN–). Данные могут выводиться из LTC2345 с использованием выходов SDO с различной тактовой частотой в зависимости от требуемой пропускной способности дискретизации.
Несмотря на то, что существует множество АЦП, LTC2345 особенно подходит для управления двигателем благодаря 8 одновременным каналам дискретизации. Выборка синхронизируется с одним нарастающим фронтом на линии преобразования. Фазные токи и выходы датчика абсолютного угла затем могут быть синхронизированы с одним и тем же моментом времени во время ШИМ с выравниванием по центру. Работа с одним источником питания 5 В упрощает конструкцию источника питания, при этом потребляя менее 20 мА. Отдельное выходное напряжение цифровой логики позволяет LTC2345 взаимодействовать с микроконтроллерами, процессорами или FPGA с более низким напряжением. Благодаря гибкому характеру диапазонов аналоговых входов смещение 2,5 В датчиков положения и тока может быть автоматически удалено аппаратно с помощью аналоговых входных каналов (IN–). Данные могут выводиться из LTC2345 с использованием выходов SDO с различной тактовой частотой в зависимости от требуемой пропускной способности дискретизации.
Рисунок 14.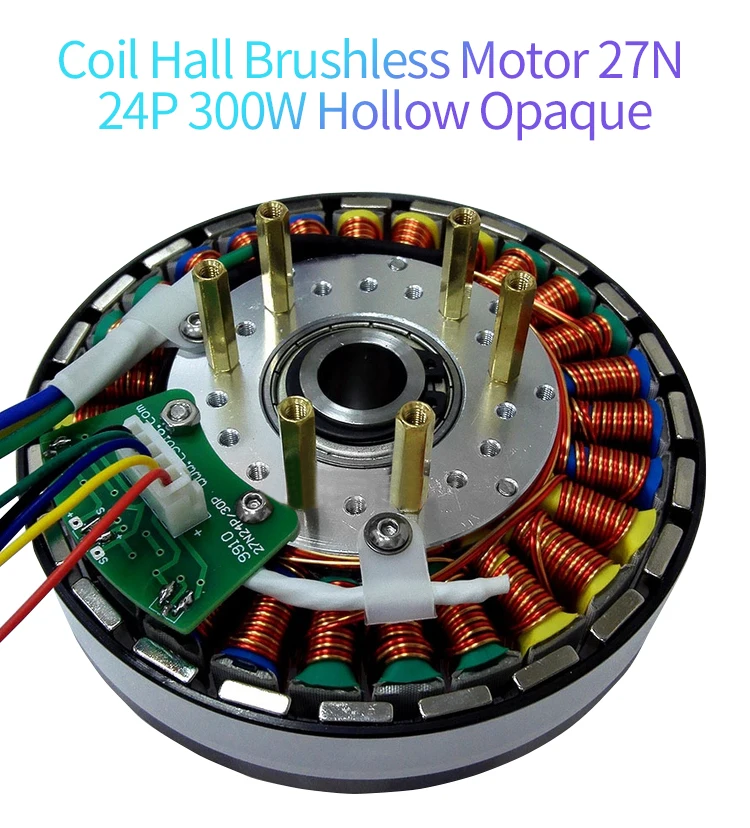 Блок-схема LTC2345.
Блок-схема LTC2345.
Выводы
С ростом распространенности BLDC в исполнительных системах управления требуются более совершенные алгоритмы, датчики и приводные схемы. Синусоидальная и FOC — две стратегии коммутации, которые обеспечивают точное управление BLDC. Обе стратегии требуют точного измерения угла ротора BLDC, что может быть затруднено без правильных компонентов. Однако ADA4571 и AD22151 упрощают это измерение. LT1158 упрощает линии возбуждения ШИМ для трех фаз для БКЭПТ за счет уменьшения количества линий ШИМ и исключения расчетов мертвого времени. AD8418 упрощает ток обмотки, а LTC2345 легко оцифровывает и синхронизирует выходы нескольких аналоговых датчиков. Эти компоненты составляют небольшую часть портфолио Analog Devices для приложений управления двигателями. Для получения дополнительной информации и помощи по проектированию посетите веб-сайт Analog Devices.
использованная литература
1 Шиён Ли.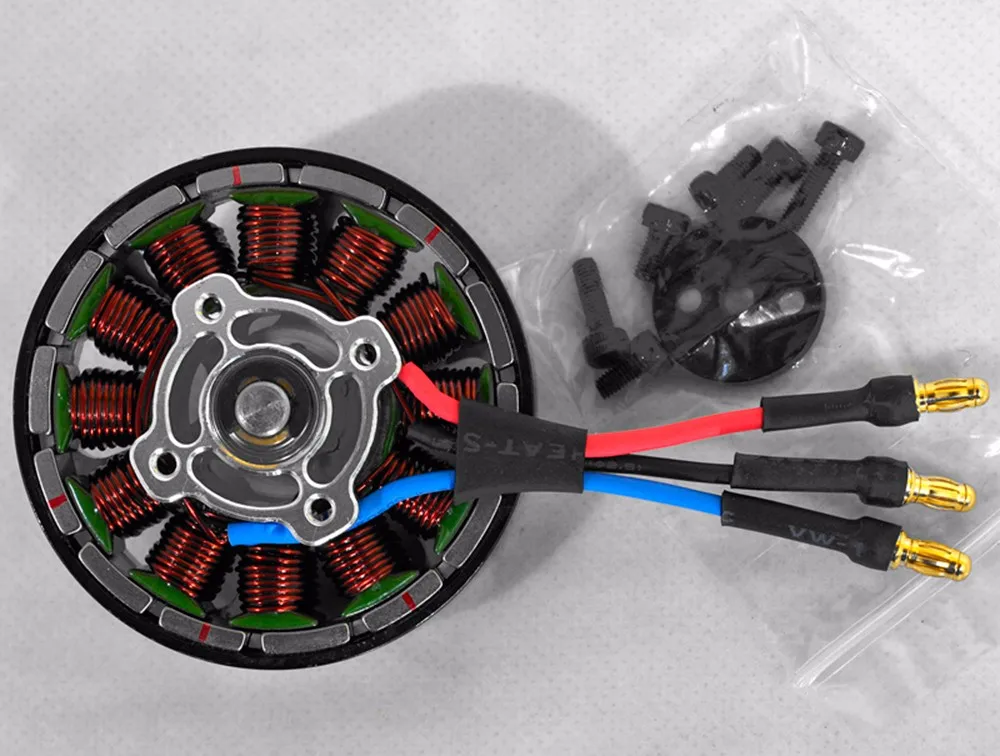 «Сравнительное исследование методов коммутации трехфазного бесщеточного двигателя постоянного тока с постоянными магнитами». 2009.
«Сравнительное исследование методов коммутации трехфазного бесщеточного двигателя постоянного тока с постоянными магнитами». 2009.
2 Даниэль Коллинз. «Часто задаваемые вопросы: что такое синусоидальная коммутация для двигателей постоянного тока?» Советы по управлению движением.
3 Джин-Ву Юнг. «Проект № 2 Космический векторный инвертор ШИМ». Университет штата Огайо, февраль 2005 г.
Автор
Чарльз Фрик
Чарльз (Час) Фрик — инженер по системным приложениям в Aerospace and Defense Group в Гринсборо, Северная Каролина. До прихода в ADI Час получил две степени бакалавра наук в области робототехники и электротехники в Вустерском политехническом институте в 2016 году. С момента прихода в ADI в 2016 году он работал над всевозможными проектами внутренних и внешних заказчиков, затрагивающими области проектирования печатных плат, встроенного кода C. , графические интерфейсы MATLAB, автоматизация тестирования Python, управление двигателем и многое другое.