Схема подключения частотного преобразователя: звезда — треугольник
Перейти в каталог продукции: Частотные преобразователи
Для управления трехфазным асинхронным двигателем применяются частотные преобразователи (инверторы), рассчитанные на однофазное или трехфазное входное напряжение. Инверторы обеспечивают возможность мягкого запуска двигателя и регулировки частоты оборотов, защиту от перегрузок. Кроме этого, частотник позволяет подключать трехфазные двигатели к однофазным сетям без потерь мощности. Преобразователи частоты трансформируют напряжение электросети частотой 50 Гц в импульсное с частотой от 0 Гц до 1 кГц.
Внимание: представленная схема является общей. При подключении используйте схему из инструкции по эксплуатации!
Однофазные преобразователи частоты рассчитаны на входное напряжение 1 фаза 220 В и на выходе формируют трехфазное напряжение 220 В заданной частоты. Иными словами, однофазный инвертор обеспечивает трехфазное питание асинхронного двигателя от бытовых электросетей. При использовании однофазных частотных преобразователей, в клеммной коробке двигателя, клеммы подключают по схеме «треугольник» (Δ). При подключении трехфазного асинхронного двигателя к однофазной сети 220 В, при использовании конденсаторной схемы, неизбежна большая потеря мощности. В то время как, при пользовании однофазного частотного преобразователя, подключаемого в двигателю по схеме «треугольник» (Δ), потерь мощности не происходит.
При использовании однофазных частотных преобразователей, в клеммной коробке двигателя, клеммы подключают по схеме «треугольник» (Δ). При подключении трехфазного асинхронного двигателя к однофазной сети 220 В, при использовании конденсаторной схемы, неизбежна большая потеря мощности. В то время как, при пользовании однофазного частотного преобразователя, подключаемого в двигателю по схеме «треугольник» (Δ), потерь мощности не происходит.
Более совершенные трехфазные преобразователи частоты работают от промышленных трехфазных сетей с напряжением 380 В, 50 Гц. Частота напряжения на выходе – от 0 Гц до 1кГц. Трехфазные инверторы подключают по схеме «звезда» (Y).
Трехфазный частотный преобразователь подключают асинхронному двигателю по схеме звезда:
Однофазный частотный преобразователь подключают асинхронному двигателю по схеме треугольник:
Для ограничения пускового тока и снижения пускового момента при пуске асинхронного двигателя мощностью более 5 кВт может применяться метод переключения «звезда-треугольник».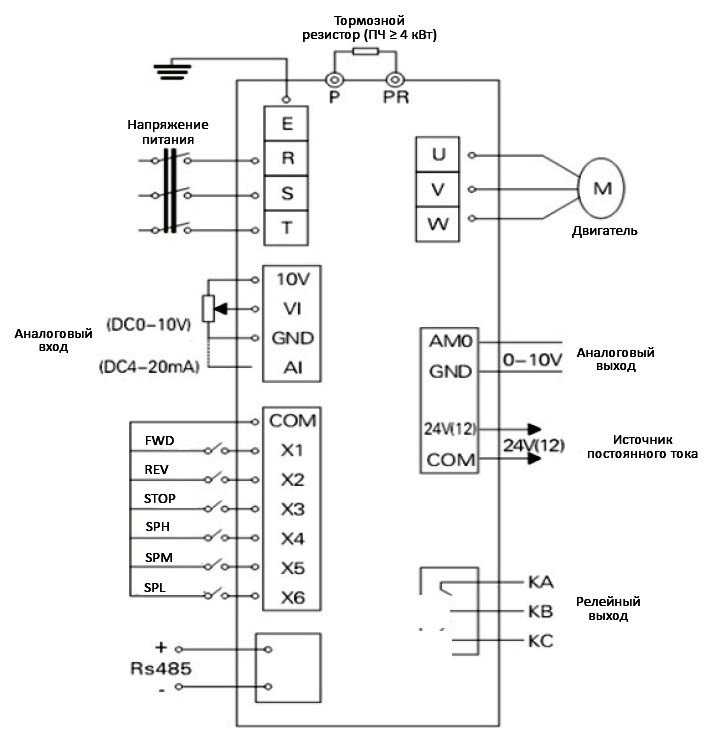 В момент пуска напряжение на статор подключается по схеме «звезда», как только двигатель разгонится до номинальной скорости, производится переключение питания на схему «треугольник». Пусковой ток при переключении втрое меньше, чем при прямом пуске двигателя от сети. Этот метод пуска оптимально подходит для механизма с большой маховой массой, если нагрузка набрасывается после разгона.
В момент пуска напряжение на статор подключается по схеме «звезда», как только двигатель разгонится до номинальной скорости, производится переключение питания на схему «треугольник». Пусковой ток при переключении втрое меньше, чем при прямом пуске двигателя от сети. Этот метод пуска оптимально подходит для механизма с большой маховой массой, если нагрузка набрасывается после разгона.
Способ пуска переключением «звезда-треугольник» можно использовать только для двигателей, имеющих возможность подключения по обеим схемам. При пуске наблюдается уменьшение пускового момента на треть от номинального. Если переключение произойдет до того, как двигатель разгонится, ток увеличится до значений, соответствующих току прямого пуска.
При пуске переключением «звезда-треугольник» неизбежны резкие скачки токов, в отличие от плавного нарастания при прямом пуске. В момент переключения на «треугольник» на двигатель не подается напряжение и скорость вращения может резко снизится. Для восстановления частоты оборотов требуется увеличение тока.
Перейти в каталог продукции: Частотные преобразователи
Как подключить частотный преобразователь к электродвигателю — основные этапы
16811
Частотный преобразователь — это высокотехнологичный прибор с широкими возможностями. Подключение частотного преобразователя помогает автоматизировать различные производственные процессы, получить существенную экономию электроэнергии и заметно продлить ресурс оборудования.
Микропроцессорная база и встроенные компьютерные технологии делают прибор очень гибким по функционалу. Выбор комбинаций огромен, но для начала частотный преобразователь необходимо правильно подключить и настроить.
Установка частотника
Ошибки при подключении двигателя через частотный преобразователь способны значительно снизить срок его жизни и даже вывести электропривод из строя при первом же запуске. Важным этапом ввода в эксплуатацию является выбор предполагаемого места установки преобразователя. Необходимо учитывать комплекс условий, в числе которых:
Необходимо учитывать комплекс условий, в числе которых:
- Возможности питающей линии.
- Диапазон рабочих температур.
- Влажность.
- Вибрации.
- Наличие агрессивных сред (какой класс защиты IP требуется).
Частотник можно монтировать вдали от электродвигателя. Но есть нюансы с длиной кабеля. Чтобы избежать появления эффекта отраженной волны, перенапряжения и коронного заряда, длину питающего кабеля следует ограничить. При периоде ШИМ от 0,3 мс — не более 45 м, при ШИМ 0,1 мс — не более 16 м.
Если двигатель специально предназначен для работы совместно с преобразователем, то длина кабеля может быть любой. Например, двигатели, сертифицированные по стандарту NEMA Standart MG-1. Двигатель для ПЧ должен быть оснащен изоляцией класса F или выше, а также иметь фазовую изоляцию. Также, чтобы избежать нежелательных явлений при большой длине кабеля, можно установить сглаживающие реакторы и фильтры сразу после ПЧ и непосредственно перед электродвигателем.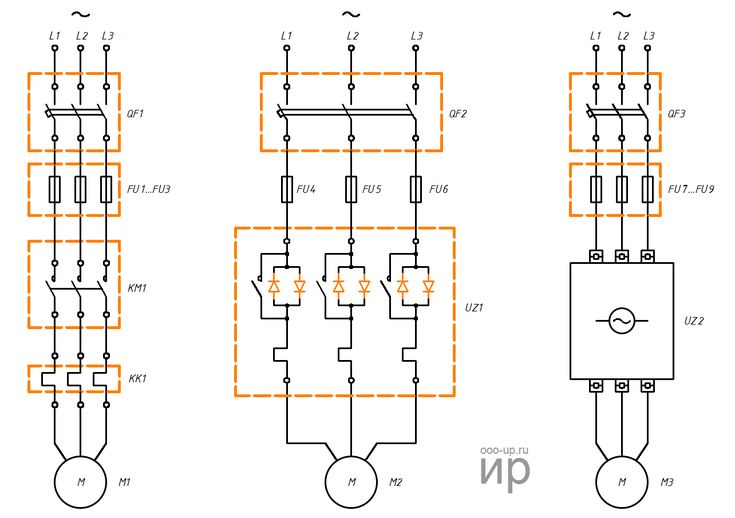
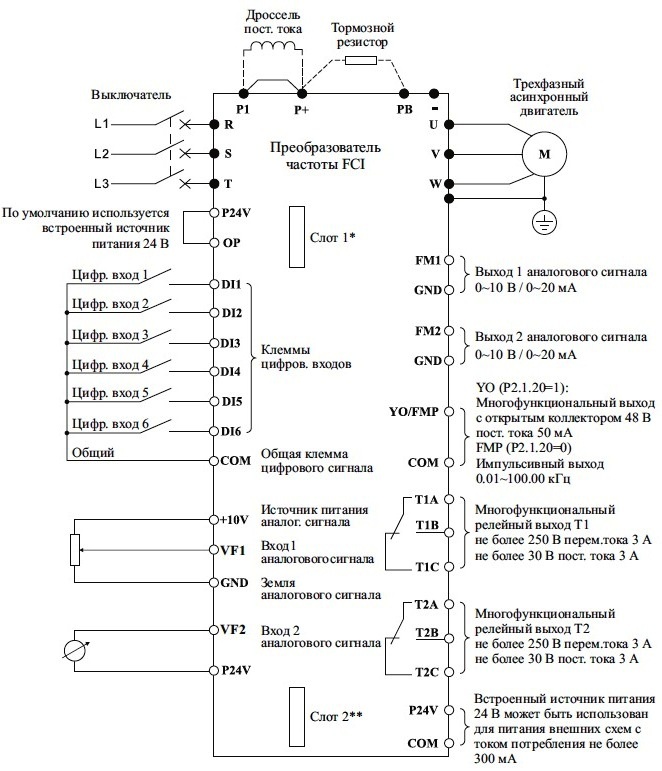
Подключение частотного преобразователя к электродвигателю следует производить строго по инструкции производителя. Особенно внимательно нужно отнестись к подключению силовой части. Перед прибором необходимо установить автоматический выключатель, работающий с током ≥ номинальному потребляемому току электродвигателя. Входные клеммы должны быть подключены только к фазам питающей сети (заземление только к заземляющему контуру), а выходные клеммы — к питаемому электродвигателю. В компании «Веспер» разработаны наглядные схемы и даны подробные инструкции к каждой модели. Например, схема подключения частотного преобразователя «Веспер E4-8400»:
Сетевые технологии для управления
Настройка частотника и программирование режимов работы осуществляется непосредственно с панели управления, выносного пульта или, что наиболее удобно, с помощью компьютера. Операционное место может находиться за многие километры от ПЧ, для этого необходимо воспользоваться сетевыми технологиями.
Для совместной работы электродвигателя и системы автоматического управления используются различные протоколы передачи данных. Наибольшее распространение получил протокол связи Modbus с интерфейсом RS-485. Передача управляющего сигнала в линиях RS-485 осуществляется по проводу. Даже если сразу не требуется включать частотник в систему удаленного управления, на перспективу такой вариант подключения следует предусмотреть и заранее запланировать место, где удобнее проложить магистраль и подключиться к сети.
ПЧ — органы управления
Преобразователи «Веспер» оборудованы панелью с информационным ЖК-дисплеем и набором для управления и проведения пусконаладки. В зависимости от модели ПЧ, дисплеи могут отличаться количеством строчек. На дисплей прибора можно выводить данные о текущем состоянии параметров.
Для большего удобства и реализации более сложных систем управления через аналоговые и дискретные (релейные, транзисторные) выходы можно подключить выносной ДУ-пульт. А через линию интерфейсной связи — ПК (ноутбук или стационарный).
А через линию интерфейсной связи — ПК (ноутбук или стационарный).
Ноутбук можно использовать в режиме осциллографа — для наблюдения за изменениями параметральных величин в реальном времени. В таком случае также необходимо заранее подготовить место с изолированной поверхностью и предусмотреть возможность работы ноутбука от батареи.
Настройка перед запуском
Частотные преобразователи — сложные компьютеризированные устройства со множеством функций и настроек. Чтобы облегчить и ускорить ввод прибора в эксплуатацию, на заводе уже проведены базовые настройки. При этом многие параметры «по умолчанию» могут быть оптимальными для решения поставленных задач.
В дополнение к базовым настройкам, преобразователи «Веспер» поддерживают функцию автонастройки — идентификационный пуск. В этом режиме ПЧ до запуска двигателя или уже у работающего двигателя автоматически определяет параметры обмоток.
Перед запуском также необходимо проверить и задать стартовый набор параметров:
- Характеристики управляемого двигателя — напряжение, мощность, рабочий диапазон частоты вращения (эти параметры можно посмотреть в технической документации или на шильдике двигателя).

- Канал задания — указать, из какого источника ПЧ следует брать задания (панель управления, дискретные/аналоговые выходы, удаленный интерфейс).
- Канал управления — указать, откуда будут поступать управляющие команды (запуск/остановка). В качестве управляющего канала можно выбрать: панель управления, дискретные/аналоговые выходы, удаленный интерфейс.
- Схема преобразования — если нет опыта, эту настройку лучше не менять, оставить по умолчанию.
Строго следуя инструкции и обладая базовыми знаниями, можно самостоятельно разобраться с тем, как подключить частотный преобразователь к электродвигателю. Но если нет желания или времени во все вникать — поручите это высококвалифицированным сотрудникам «Веспер». Они проведут пусконаладочные работы быстро и профессионально.
Видео
Вступительный фильм о типовых примерах применения преобразователей частоты Веспер. В видеоролике показаны преимущества использования частотно-регулируемого электропривода по отношению к другим типам приводов. Коротко представлена продукция нашей компании и география ее использования.
Коротко представлена продукция нашей компании и география ее использования.
Функция преобразователя частоты и основные.
Преобразователь частоты преобразует частоту переменного тока, то есть преобразует переменный ток частотой 50 или 60 Гц в переменный ток любой желаемой частоты. Устройство также может изменять напряжение, если это требуется.
Зачем нужен преобразователь частоты
Преобразователи частоты используются для обеспечения точного управления критическими процессами, такими как: Система охлаждения (радиаторы, насосы), Топливная система (бустер, обогреватели…), Вентиляция (вентиляция машинного зала) . Преобразователь частоты также обеспечивает энергосбережение, а во многих случаях также является ограничителем шума.
Принцип работы преобразователя частоты:
Для изменения частоты переменного тока преобразователь частоты выполняет двухступенчатое преобразование. Сначала он преобразует переменный ток в постоянный, а затем постоянный в переменный с нужной частотой.
Таким образом, преобразователь частоты имеет два набора рабочих параметров: сначала схема выпрямителя преобразует переменный ток в постоянный, а затем схема инвертора с тиристорами/БТИЗ/БТИЗ преобразует постоянный ток в переменный с заданной частотой. Изменение или смещение частоты происходит в каскаде преобразователя.
Если требуется преобразование напряжения, трансформатор обычно включается либо во входную, либо в выходную цепь переменного тока, и этот трансформатор может также обеспечивать гальваническую развязку между входной и выходной цепями переменного тока.
Батарея также может быть добавлена к цепи постоянного тока, чтобы улучшить работу преобразователя при кратковременных отключениях входного питания.
преобразователь частоты basicБлок-схема преобразователя частоты
- Напряжение сети переменного тока -3 x 400 … 500 В переменного тока, 50/60 Гц.
- Сетевой фильтр -Ограничивает электрические помехи в сети общего пользования и улучшает электромагнитную
совместимость устройства с помехами от сети электропитания. - Выпрямитель — Преобразует трехфазное напряжение переменного тока в напряжение постоянного тока.
- Шина постоянного тока – Напряжение постоянного тока в режиме ожидания = √2 x напряжение сети [В]
- Конденсаторы звена постоянного тока — Сглаживает напряжение звена постоянного тока
- Инвертор — Преобразует напряжение постоянного тока в переменное напряжение переменного тока с переменной частотой.
- Напряжение двигателя — Переменное напряжение переменного тока, 0–95 % напряжения питания.
Переменная выходная частота: 0–700 Гц - Плата управления — Плата управления управляет преобразователем частоты. Он генерирует последовательность импульсов, которая используется для преобразования
напряжения постоянного тока в переменное напряжение переменного тока с переменной частотой.

Принципиальная схема силовой части преобразователя
Блок-схема преобразователя частоты Принципиальная схема преобразователя частоты
AS Блокировка запуска; EW Трансформатор замыкания на землю; Выпрямитель GL с тиристорной предварительной зарядкой; SE Обнаружение тока; СНТ Импульсный блок питания; WS Инверторное управление; инвертор WR; ZK Шина постоянного тока Вариант устройства
; BC Тормозной прерыватель.
Принадлежности
BW Тормозной резистор; Фильтр двигателя MF ; Сетевой фильтр NF
Типовой IGBT – Биполярный транзистор с изолированным затвором
[adee]
Основы работы с преобразователем частоты
Для достижения высокой эффективности, отличной управляемости и энергосбережения в приложениях, связанных с промышленными асинхронными двигателями, необходимо внедрить системы управляемых преобразователей частоты. Система преобразователя частоты в настоящее время представляет собой двигатель переменного тока, питаемый от статического преобразователя частоты. Современный преобразователь частоты отлично подходит для двигателей переменного тока и прост в установке. Однако одна важная проблема связана с несинусоидальным выходным напряжением. Этот фактор вызвал множество нежелательных проблем. Повышенные потери в асинхронном двигателе, шум и вибрации, вредное воздействие на систему индукционной изоляции и выход из строя подшипников являются примерами проблем, связанных с системами, связанными с преобразователем частоты. Повышенные потери на индукцию означают снижение выходной мощности индукции для предотвращения перегрева. Измерения в лаборатории показывают, что повышение температуры может быть на 40 % выше при использовании преобразователя частоты по сравнению с обычными источниками питания. Непрерывные исследования и совершенствование преобразователей частоты позволили решить многие из этих проблем. К сожалению, кажется, что решение одной проблемы обострило другую. Снижение потерь в индукционных преобразователях и преобразователях частоты приводит к увеличению вредного воздействия на изоляцию. Производители индукционных плит, конечно же, знают об этом. На рынке начинают появляться новые индукционные конструкции (двигатели с защитой от инвертора). Улучшенная изоляция обмотки статора и другие конструктивные усовершенствования гарантируют, что асинхронные двигатели будут лучше приспособлены для применения в преобразователях частоты.
Повышенные потери на индукцию означают снижение выходной мощности индукции для предотвращения перегрева. Измерения в лаборатории показывают, что повышение температуры может быть на 40 % выше при использовании преобразователя частоты по сравнению с обычными источниками питания. Непрерывные исследования и совершенствование преобразователей частоты позволили решить многие из этих проблем. К сожалению, кажется, что решение одной проблемы обострило другую. Снижение потерь в индукционных преобразователях и преобразователях частоты приводит к увеличению вредного воздействия на изоляцию. Производители индукционных плит, конечно же, знают об этом. На рынке начинают появляться новые индукционные конструкции (двигатели с защитой от инвертора). Улучшенная изоляция обмотки статора и другие конструктивные усовершенствования гарантируют, что асинхронные двигатели будут лучше приспособлены для применения в преобразователях частоты.
Введение
Одной из самых серьезных проблем асинхронного двигателя была сложность его адаптации к регулировке скорости.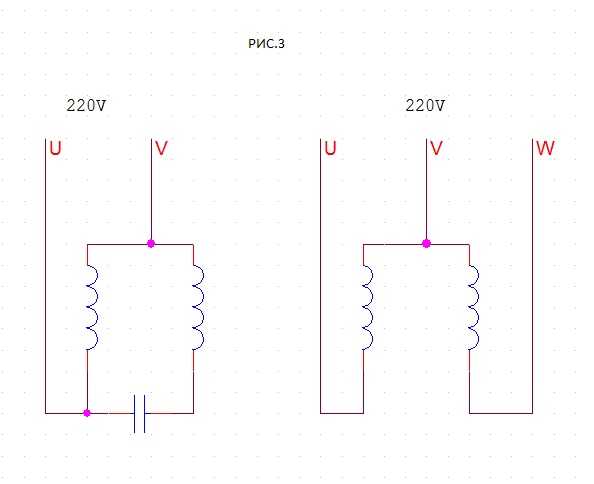 Синхронная скорость двигателя переменного тока определяется следующим уравнением.
Синхронная скорость двигателя переменного тока определяется следующим уравнением.
п с = 120 * ф/р
n с = синхронная скорость
f = частота электросети
p = номер полюса
Единственный способ отрегулировать скорость для заданного числа полюсов — изменить частоту.
Основной принцип
Теоретически основная идея проста, процесс преобразования стабильной частоты сети в переменную в основном выполняется в два этапа:
- Источник питания переменного тока выпрямляется в напряжение постоянного тока.
- Постоянное напряжение преобразуется в переменное напряжение желаемой частоты.
Преобразователь частоты в основном состоит из трех блоков: выпрямителя, звена постоянного тока и инвертора.
Различные типы преобразователей частоты
Инвертор источника напряжения ШИМ (VSI)
ШИМ (широтно-импульсная модуляция) широко применяется в производстве преобразователей частоты. Они доступны от нескольких сотен ватт до мегаватт.
Они доступны от нескольких сотен ватт до мегаватт.
ШИМ-преобразователь не обязательно должен точно соответствовать нагрузке, он должен только убедиться, что нагрузка не потребляет ток выше, чем рассчитан ШИМ-преобразователь. Вполне возможно запустить индукцию на 20 кВт с ШИМ-преобразователем на 100 кВт. Это большое преимущество, которое упрощает работу с приложением.
В настоящее время преобразователь частоты ШИМ использует биполярный транслятор с изолированным затвором (IGBT). Современные ШИМ-преобразователи частоты работают очень хорошо и не сильно отстают от конструкций, использующих синусоидальный источник питания, по крайней мере, в диапазоне мощностей до 100 кВт или около того.
Инвертор источника тока (CSI)
Инвертор источника тока имеет грубую и довольно простую конструкцию по сравнению с ШИМ. В цепях питания используются простые тиристоры или тринисторы, что делает его намного дешевле. Он также имеет преимущество в том, что он очень надежен. Конструкция делает его устойчивым к короткому замыканию из-за больших катушек индуктивности в звене постоянного тока. Он более громоздкий, чем PWM.
Конструкция делает его устойчивым к короткому замыканию из-за больших катушек индуктивности в звене постоянного тока. Он более громоздкий, чем PWM.
Раньше инвертор источника тока был лучшим выбором для больших нагрузок. Недостатком инвертора с источником тока является необходимость согласования с нагрузкой. Преобразователь частоты должен быть рассчитан на используемый асинхронный двигатель. По сути, сама индукция является частью инвертированной цепи.
Инвертор источника тока подает на асинхронный двигатель ток прямоугольной формы. На низких скоростях индукция создает зубчатый крутящий момент. Этот тип преобразователя частоты будет генерировать больше шума в источнике питания по сравнению с преобразователем ШИМ. Фильтрация необходима.
Сильные переходные процессы выходного напряжения являются дополнительным недостатком инвертора источника тока. В худших случаях переходные процессы могут почти в два раза превышать номинальное напряжение. Также существует риск преждевременного износа изоляции обмотки при использовании этого преобразователя частоты. Этот эффект наиболее серьезен, когда нагрузка не соответствует преобразователю частоты должным образом. Это может произойти при работе с частичной нагрузкой. Этот вид преобразователя частоты все больше теряет свою популярность.
Этот эффект наиболее серьезен, когда нагрузка не соответствует преобразователю частоты должным образом. Это может произойти при работе с частичной нагрузкой. Этот вид преобразователя частоты все больше теряет свою популярность.
Векторное управление потоком (FVC)
Векторное управление потоком — это более сложный тип преобразователя частоты, который используется в приложениях с экстремальными требованиями к управлению. Например, на бумажных фабриках необходимо очень точно контролировать скорость и усилия растяжения.
Преобразователь частоты FVC всегда имеет некоторую петлю обратной связи. Этот тип преобразователя частоты, как правило, не представляет большого интереса для насосов. Это дорого, и его преимущества не могут быть использованы в своих интересах.
Влияние на двигатель
Индукция работает лучше всего, когда питается от источника чистого синусоидального напряжения. Чаще всего это происходит при подключении к надежному источнику питания.
Когда индукционный элемент подключен к преобразователю частоты, на него подается несинусоидальное напряжение, больше похожее на прямоугольное напряжение. Если мы подадим на 3-фазную индукцию симметричное 3-фазное прямоугольное напряжение, все гармоники, кратные трем, а также четные числа, будут устранены из-за симметрии. Но еще остались числа 5;7 и 11;13 и 17;19.и 23;25 и так далее. Для каждой пары гармоник меньший номер соответствует вращению в обратном направлении, а верхний номер — вращению в прямом направлении.
Скорость асинхронного двигателя определяется основным числом, или числом 1, из-за его сильного преобладания. Что теперь происходит с гармониками?
С точки зрения гармоник, кажется, что индукция заблокировала ротор, что означает, что скольжение для гармоник равно примерно 1. Они не обеспечивают никакой полезной работы. Результатом являются в основном потери ротора и дополнительный нагрев. В нашем приложении, в частности, это серьезный результат. Однако с помощью современных технологий можно устранить большую часть гармоник в индукционном токе, тем самым уменьшив дополнительные потери.
Преобразователь частоты до
Самые ранние преобразователи частоты часто использовали простое прямоугольное напряжение для питания асинхронного двигателя. Они вызывали проблемы с нагревом, а индукции работали с типичным шумом, вызванным пульсациями крутящего момента. Гораздо лучшую производительность удалось получить, просто исключив пятую и седьмую части. Это было сделано за счет дополнительного переключения сигнала напряжения.
Преобразователь частоты сегодня
В настоящее время техника стала более сложной, и большинство ее недостатков ушли в прошлое. Разработка быстродействующих полупроводников и микропроцессора позволила настроить схему переключения таким образом, чтобы исключить большую часть вредных гармоник.
Частоты коммутации до 20 кГц доступны для преобразователей частоты в диапазоне средней мощности (до нескольких десятков кВт). Индукционный ток преобразователя частоты этого типа будет иметь почти синусоидальную форму.
При высокой частоте коммутации индуктивные потери остаются низкими, но потери в преобразователе частоты увеличиваются. Общие потери станут выше при слишком высоких частотах переключения.
Некоторые основы теории двигателя
Создание крутящего момента в асинхронном двигателе может быть выражено как
T = V * τ * B [Нм]
V = Рабочий объем ротора [м 3 ]
τ = Ток на метр окружности отверстия статора
B = плотность потока в воздушном зазоре
B = пропорционально (E / ω) = E / (2 * π * f)
ω = угловая частота напряжения статора
E = индуктивное напряжение статора
Для достижения наилучших характеристик при различных скоростях становится необходимым поддерживать соответствующий уровень намагниченности для индукции для каждой скорости.
Диапазон различных характеристик крутящего момента показан на следующем рисунке.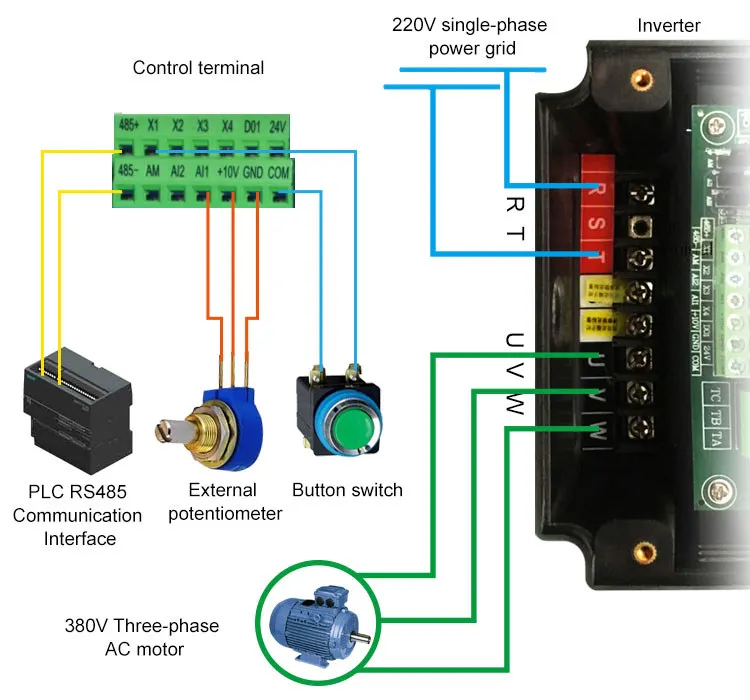 Для нагрузки с постоянным крутящим моментом отношение V/F должно быть постоянным. Для квадратичной нагрузки крутящего момента постоянное соотношение V/F приведет к чрезмерно высокому намагничиванию на более низкой скорости. Это приведет к излишне высоким потерям в стали и потерям сопротивления (I 2 R).
Для нагрузки с постоянным крутящим моментом отношение V/F должно быть постоянным. Для квадратичной нагрузки крутящего момента постоянное соотношение V/F приведет к чрезмерно высокому намагничиванию на более низкой скорости. Это приведет к излишне высоким потерям в стали и потерям сопротивления (I 2 R).
Лучше использовать прямоугольное отношение V/F. Таким образом, потери в стали и потери I 2 R снижаются до уровня, более приемлемого для фактического момента нагрузки.
Если мы посмотрим на рисунок, то обнаружим, что напряжение достигло своего максимума и не может быть увеличено выше базовой частоты 50 Гц. Диапазон выше базовой частоты называется диапазоном ослабления поля. Следствием этого является невозможность поддержания необходимого крутящего момента без увеличения тока. Это приведет к проблемам с нагревом того же рода, что и при нормальном пониженном напряжении, работающем от синусоидальной электросети. Номинальный ток преобразователя частоты, скорее всего, будет превышен.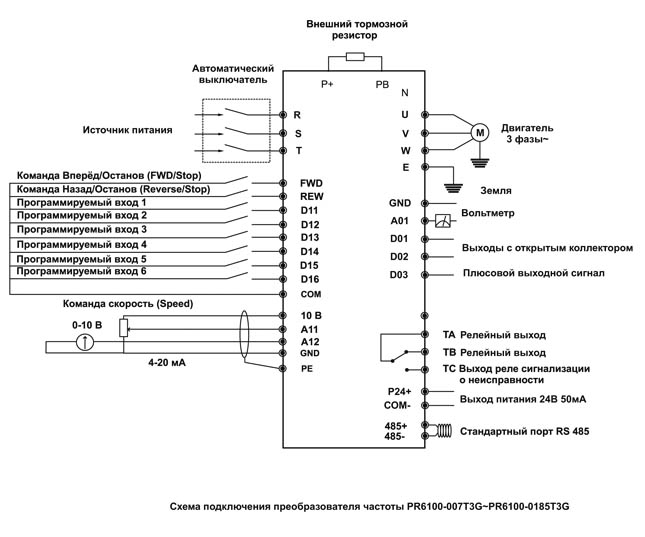
Работа в диапазоне ослабления поля
Иногда возникает искушение запустить насос на частотах выше частоты промышленной электросети, чтобы достичь рабочей точки, которая в противном случае была бы невозможна. Это требует дополнительной осознанности. Мощность на валу насоса будет увеличиваться пропорционально кубу скорости. Превышение скорости на 10% потребует на 33% больше выходной мощности. Грубо говоря, можно ожидать, что повышение температуры увеличится примерно на 75%.
Тем не менее, есть предел тому, что мы можем выжать из индукции на сверхскорости. Максимальный крутящий момент индукции будет падать как функция 1/F в диапазоне ослабления поля.
Очевидно, что индукция пропадет, если преобразователь частоты не сможет поддерживать ее с напряжением, соответствующим необходимому крутящему моменту.
Снижение номинальных характеристик
Во многих случаях индукция работает на максимальной мощности от синусоидальной электросети, и любой дополнительный нагрев недопустим. Если такая индукция питается от какого-либо преобразователя частоты, она, скорее всего, должна работать с более низкой выходной мощностью, чтобы избежать перегрева.
Если такая индукция питается от какого-либо преобразователя частоты, она, скорее всего, должна работать с более низкой выходной мощностью, чтобы избежать перегрева.
Нет ничего необычного в том, что преобразователь частоты для больших насосов мощностью более 300 кВт добавит дополнительные индукционные потери на 25–30 %. В верхнем диапазоне мощностей лишь некоторые из преобразователей частоты имеют высокую частоту коммутации: от 500 до 1000 Гц обычно для преобразователей частоты предыдущего поколения.
Для компенсации дополнительных потерь необходимо уменьшить выходную мощность. Мы рекомендуем общее снижение номинальных характеристик на 10–15 % для больших насосов.
Поскольку преобразователь частоты загрязняет питающую сеть гармониками, иногда энергокомпания предписывает входной фильтр. Этот фильтр снизит доступное напряжение, как правило, на 5–10%. Следовательно, индукция будет проходить в 90–95 % номинального напряжения. Следствием является дополнительный нагрев. Может потребоваться снижение номинальных характеристик.
Может потребоваться снижение номинальных характеристик.
Пример
Предположим, что выходная мощность фактического двигателя насоса составляет 300 кВт при частоте 50 Гц, а повышение температуры составляет 80°C при использовании синусоидальной электросети. Дополнительные потери в размере 30% приведут к тому, что индукция будет на 30% теплее. Консервативное предположение состоит в том, что повышение температуры зависит от квадрата мощности на валу.
Чтобы температура не превышала 80°C, мы должны уменьшить мощность на валу до
P уменьшенный = √(1/1,3) * 300 = 263 кВт
Уменьшение может быть достигнуто либо за счет уменьшения диаметра рабочего колеса, либо за счет снижения скорости.
Потери преобразователя частоты
При определении общего КПД системы преобразователя частоты необходимо учитывать внутренние потери преобразователей частоты. Эти потери преобразователя частоты не являются постоянными, и их нелегко определить. Они состоят из постоянной части и части, зависящей от нагрузки.
Эти потери преобразователя частоты не являются постоянными, и их нелегко определить. Они состоят из постоянной части и части, зависящей от нагрузки.
Постоянные потери:
Потери на охлаждение (охлаждающий вентилятор) — потери в электронных схемах и т.д.
Потери, зависящие от нагрузки:
Коммутационные потери и потери в выводах в силовых полупроводниках.
На следующем рисунке показана зависимость эффективности преобразователя частоты от частоты при кубической нагрузке для блоков мощностью 45, 90 и 260 кВт. Кривые репрезентативны для преобразователей частоты в диапазоне мощностей 50–300 кВт; с частотой переключения около 3 кГц и с IGBT второго поколения.
Влияние на изоляцию двигателя
Выходные напряжения современных преобразователей частоты имеют очень короткое время нарастания напряжения.
dU/dT = 5000 В/мкс является общепринятым значением.
Такие крутые наклоны напряжения вызовут чрезмерное напряжение в изоляционных материалах индукционной обмотки. При коротких временах нарастания напряжение в обмотке статора распределяется неравномерно. При синусоидальном источнике питания витковое напряжение в индукционной обмотке обычно распределяется равномерно. С другой стороны, с преобразователем частоты до 80 % напряжения будет падать на первом и втором витке. Поскольку изоляция между проводами представляет собой слабое место, это может оказаться опасным для индукции. Короткое время нарастания также вызывает отражение напряжения в индукционном кабеле. В худшем случае это явление удвоит напряжение на индукционных клеммах. Индукция питается от 69Преобразователь частоты с нулевым напряжением может подвергаться воздействию напряжения до 1900 вольт между фазами.
При коротких временах нарастания напряжение в обмотке статора распределяется неравномерно. При синусоидальном источнике питания витковое напряжение в индукционной обмотке обычно распределяется равномерно. С другой стороны, с преобразователем частоты до 80 % напряжения будет падать на первом и втором витке. Поскольку изоляция между проводами представляет собой слабое место, это может оказаться опасным для индукции. Короткое время нарастания также вызывает отражение напряжения в индукционном кабеле. В худшем случае это явление удвоит напряжение на индукционных клеммах. Индукция питается от 69Преобразователь частоты с нулевым напряжением может подвергаться воздействию напряжения до 1900 вольт между фазами.
Амплитуда напряжения зависит от длины индукционного кабеля и времени нарастания. При очень коротких временах нарастания полное отражение происходит в кабеле длиной от 10 до 20 метров.
Для обеспечения работы и длительного срока службы двигателя абсолютно необходимо, чтобы обмотка была адаптирована для использования с преобразователем частоты. Индукции для напряжения выше 500 вольт должны иметь некоторую форму усиленной изоляции. Обмотка статора должна быть пропитана смолой, которая обеспечивает изоляцию без пузырей и полостей. Тлеющие разряды часто возникают вокруг полостей. Это явление в конечном итоге разрушит изоляцию.
Индукции для напряжения выше 500 вольт должны иметь некоторую форму усиленной изоляции. Обмотка статора должна быть пропитана смолой, которая обеспечивает изоляцию без пузырей и полостей. Тлеющие разряды часто возникают вокруг полостей. Это явление в конечном итоге разрушит изоляцию.
Есть способы защитить двигатель. Помимо усиленной системы изоляции, может потребоваться установка фильтра между преобразователем частоты и индукцией. Такие фильтры можно приобрести у большинства известных поставщиков преобразователей частоты.
Фильтр обычно замедляет время нарастания напряжения по сравнению с
dU/dT = от 5000 В/мкс до 500–600 В/мкс
Выход из строя подшипника
Поломка вращающихся механизмов часто может быть связана с выходом из строя подшипников. В дополнение к чрезмерному нагреву, недостаточной смазке или усталости металла, электрический ток через подшипники может быть причиной многих загадочных поломок подшипников, особенно при больших индукциях. Это явление обычно вызвано несимметричностью магнитной цепи, которая индуцирует небольшое напряжение в структуре статора, или током нулевой последовательности. Если потенциал между конструкцией статора и узлом вала становится достаточно высоким, через подшипник произойдет разряд. Небольшие электрические разряды между телами качения и дорожкой качения подшипника в конечном итоге могут повредить подшипник.
Это явление обычно вызвано несимметричностью магнитной цепи, которая индуцирует небольшое напряжение в структуре статора, или током нулевой последовательности. Если потенциал между конструкцией статора и узлом вала становится достаточно высоким, через подшипник произойдет разряд. Небольшие электрические разряды между телами качения и дорожкой качения подшипника в конечном итоге могут повредить подшипник.
Использование преобразователей частоты повышает вероятность выхода из строя этого типа подшипника. Метод переключения современного преобразователя частоты вызывает ток нулевой последовательности, который при определенных обстоятельствах проходит через подшипники.
Самый простой способ вылечить эту проблему — поставить препятствие для тока. Обычный метод заключается в использовании подшипника с изолирующим покрытием на наружном кольце.
Выводы
Использование преобразователя частоты не означает отсутствие проблем. Множество вопросов, на которые необходимо обратить внимание при проектировании.