Тяговый электродвигатель: устройство и принцип работы
Электрические машины преобразуют механическую энергию в электрический ток и наоборот. Подавляющее большинство электрических устройств работают по простой схеме: под действием механической энергии вырабатывается электричество, которое в свою очередь вызывает движение станков, машин, механизмов, подвижного состава. В транспортной отрасли хорошо известен тяговый электродвигатель, приводящий в действие колесные пары вагонов. Использование их в режиме генератора дает возможность затормозить состав. Процесс торможения происходит за счет нагрузки, образующейся в процессе превращения механической энергии состава, находящегося в движении, в электрический ток.
Появление и развитие тяговых устройств
В самом начале, когда электрический транспорт только начал использоваться, на всех видах подвижного состава устанавливались коллекторные тяговые электродвигатели. При этом передача энергии осуществлялась по самой простой схеме, поэтому агрегатами можно было легко управлять в любом рабочем режиме.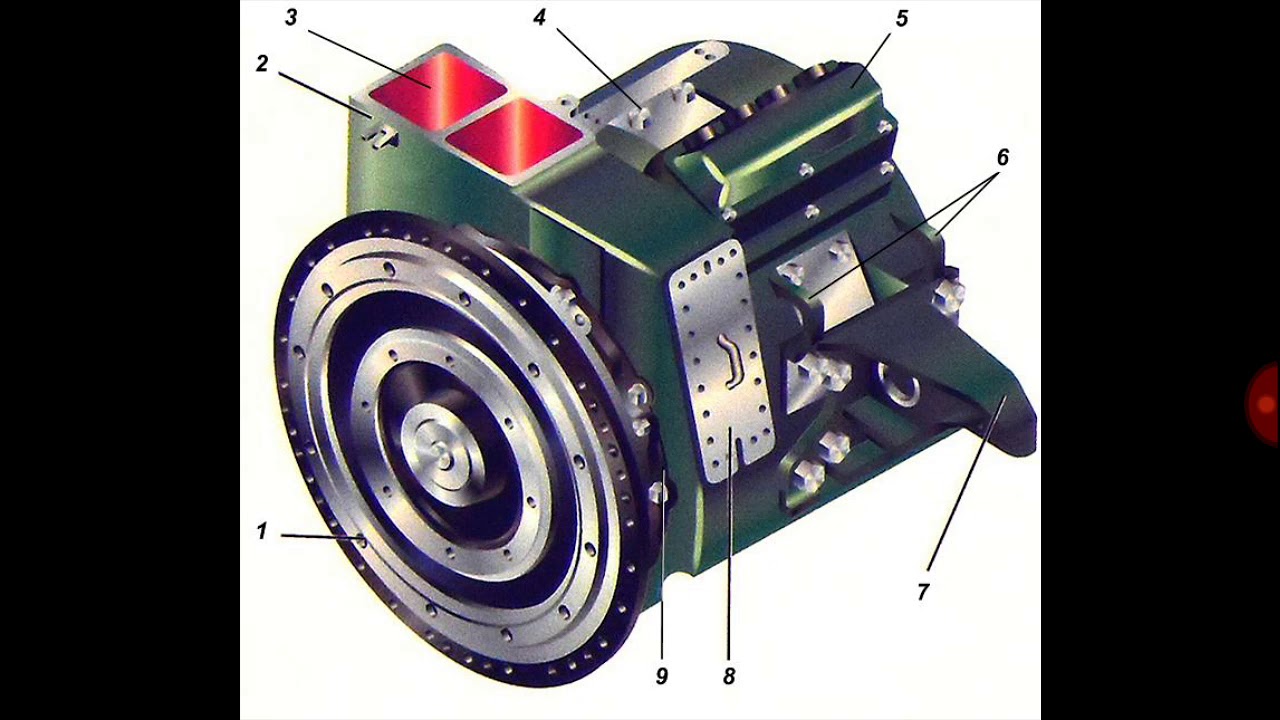 Технические и механические характеристики полностью отвечали всем требованиям транспортной специфики.
Технические и механические характеристики полностью отвечали всем требованиям транспортной специфики.
Тем не менее, в процессе эксплуатации тяговый электродвигатель постоянного тока обнаружил ряд недостатков. В первую очередь, это сам коллектор, оборудованный подвижными контактами – щетками, требующий регулярного технического обслуживания. Принимаемые меры по снижению искрения, повышению надежности коммутации, во многом усложнили устройство двигателя. В результате, его размеры заметно увеличились, а максимальная скорость вращения осталась на прежнем уровне.
Постепенно развивалось направление силовой техники на основе быстродействующих полупроводников. Это позволило заменить реостатную систему, применяемую в коллекторных агрегатах, импульсной, отличающейся повышенной надежностью и экономичностью. В дальнейшем, в вагонных парах стал устанавливаться асинхронный тяговый двигатель в качестве приводного механизма.
Основными проблемами, с которыми пришлось столкнуться при эксплуатации асинхронных двигателей, считаются сложные регулировки. Определенные трудности возникают при использовании электрического торможения, когда для этих целей служат моторы на основе короткозамкнутого ротора. В данный период идет разработка более современных тяговых приводов на основе синхронных агрегатов, в которых установлен ротор на постоянных магнитах.
Определенные трудности возникают при использовании электрического торможения, когда для этих целей служат моторы на основе короткозамкнутого ротора. В данный период идет разработка более современных тяговых приводов на основе синхронных агрегатов, в которых установлен ротор на постоянных магнитах.
Поскольку на железнодорожном транспорте до сих пор широко используются именно коллекторные агрегаты, следует более подробно рассмотреть их общее устройство и порядок работы.
Коллекторный агрегат на постоянном токе
Любой коллекторный агрегат является своеобразной электрической машиной, которая в зависимости от своего предназначения выполняет функции генератора или электродвигателя. Отличительной чертой этих устройств считается соединение якорной обмотки с коллектором.
Основным источником питания коллекторных движков служит постоянный ток. Сейчас уже выпускаются модификации многофункциональных агрегатов с невысокой мощностью, способных работать не только от постоянного, но и от переменного тока.
Стандартный тяговый электродвигатель состоит из коллектора (1), щеток (2), сердечника ротора или якоря (3), сердечника главного полюса (4), обмотки возбуждения (5), станины (6). Кроме того, сюда же включены подшипниковый щит (7), вентилятор (8), якорная обмотка (9).
Все детали соединяются в несколько конструктивных элементов. Прежде всего, это магнитная система, под влиянием которой появляется магнитное поле, а также якорь с обмоткой, вращающийся с помощью подшипников. Коллектор и другие детали разъединяются между собой воздушной прослойкой.
В агрегатах постоянного тока возникновение магнитного поля происходит с участием обмоток возбуждения. Они располагаются на полюсных сердечниках и подключены к постоянному току. Количество полюсов может быть разным, в зависимости от мощности двигателя и его использования в транспортной единице. Их число чаще всего находится в рамках от 2 до 12. Стандартная магнитная система представляет собой монолитную металлическую станину, в которой присутствуют съемные шихтованные сердечники. Чтобы понять, как взаимодействуют узлы и детали между собой, необходимо более подробно рассмотреть устройство каждого компонента.
Чтобы понять, как взаимодействуют узлы и детали между собой, необходимо более подробно рассмотреть устройство каждого компонента.
Назначение и устройство станины
Каждый тяговый электродвигатель оборудуется станиной, используемой прежде всего в качестве магнитопровода, по которому осуществляется прохождение магнитных потоков основных и дополнительных полюсов. Еще она служит местом расположения и крепления полюсов и подшипниковой защиты.
При наличии больших нагрузок станина обычно бывает отлита из стали или сварена из толстых электротехнических стальных листов. Благодаря такой конструкции создается требуемая механическая устойчивость и высокая магнитная проницаемость. Стенки обычно имеют толщину, обеспечивающую установленный уровень магнитной индукции, а ее размеры ориентированы на поперечное сечение главных полюсов и составляют не ниже 50% этого размера.
На представленном рисунке отмечено расположение станины (1), относительно других деталей и компонентов – сердечника полюса (2), катушки обмотки возбуждения (3) и полюсного башмака (4).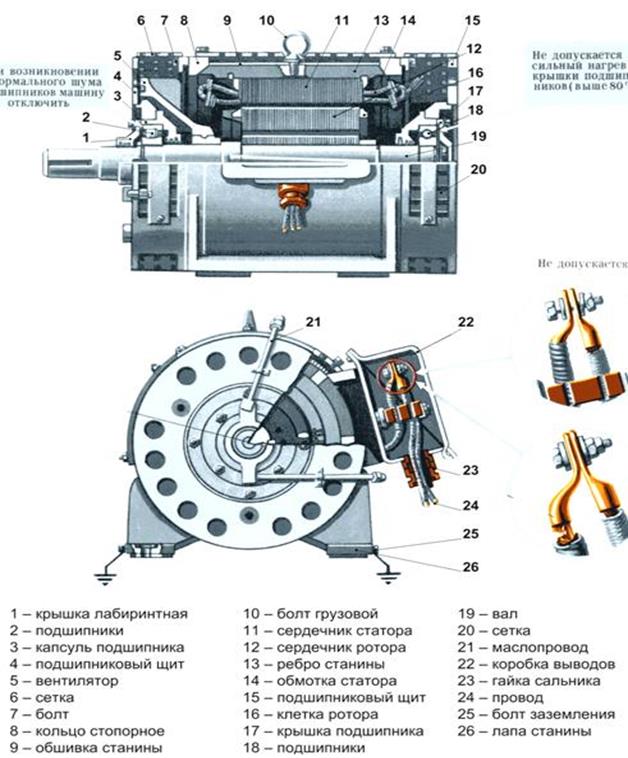 Между всеми элементами и якорем существует воздушная прослойка (5). Размеры диаметра изнутри станины рассчитываются так, чтобы в этом пространстве мог разместиться якорь, полюса главные и дополнительные и их обмотки.
Между всеми элементами и якорем существует воздушная прослойка (5). Размеры диаметра изнутри станины рассчитываются так, чтобы в этом пространстве мог разместиться якорь, полюса главные и дополнительные и их обмотки.
Тяговый электродвигатель локомотива может иметь стальную литую станину с уменьшенной массой и пониженным поперечным сечением, ориентированным на оси главных полюсов. Это дает возможность равномерно распределить магнитный поток, поступающий к станине от главного полюса.
Частично станина, не выполняющая функции магнитопровода, образует коллекторное пространство с незначительной толщиной стенок, достаточной для обеспечения необходимой механической прочности. В некоторых конструкциях это место закрывается отдельными ребрами жесткости, прикрытыми тонким защитным кожухом.
Главные полюса
Тяговый электродвигатель, работающий на постоянном токе, включает в свою конструкцию обмотку возбуждения, где и появляется магнитодвижущая сила, создающая, в свою очередь, магнитное поле. В состав обмотки входят катушки, надеваемые на сердечники основных полюсов. На стороне сердечника, направленной к якорю, устанавливается полюсный наконечник, он же башмак. С его помощью осуществляется равномерное распределение магнитного потока по всей поверхности якоря. Перечисленные детали отмечены на предыдущем рисунке вместе со станиной.
В состав обмотки входят катушки, надеваемые на сердечники основных полюсов. На стороне сердечника, направленной к якорю, устанавливается полюсный наконечник, он же башмак. С его помощью осуществляется равномерное распределение магнитного потока по всей поверхности якоря. Перечисленные детали отмечены на предыдущем рисунке вместе со станиной.
На практике довольно редко используется схема, включающая в себя полюсный сердечник и полюсный башмак. Как правило, они объединяются в единое целое и образуют главный полюс. За счет этого в сердечнике полюса наступает снижение вихревых потоков, вызываемых действием пульсаций магнитной индукции в наконечниках из-за зубчатой поверхности якоря.
Для сборки полюса используются стальные лакированные листы, которые затем попадают под пресс высокого давления. Сквозь сердечник пропускаются болты или специальные заклепки, чтобы стянуть всю конструкцию. Их равномерное распределение позволяет успешно выдерживать упругость сжатых полос. Крепление полюсов к станине осуществляется с помощью болтов или шпилек.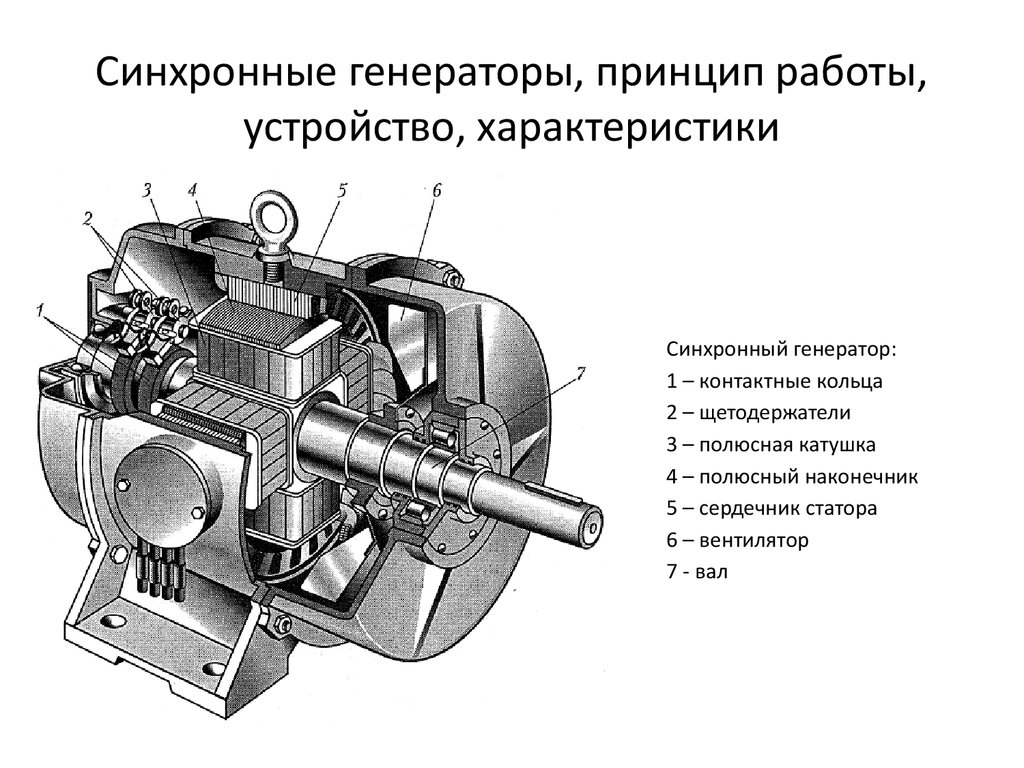
Назначение и устройство добавочных полюсов
Каждый тяговый электродвигатель мощностью более 1 кВт оборудуется дополнительными полюсами, для того чтобы снизить количество искр, появляющихся на щетках. Их устройство очень простое, включающее в себя сердечник (1) и катушку (2), где использован медный проводник в изоляции. Его сечение рассчитывается по рабочему току двигателя, поскольку эта катушка и обмотка якоря последовательно подключаются друг к другу.
Стальной сердечник изготавливается в виде монолитной конструкции, по причине отсутствия в нем вихревых токов, так как магнитная индукция имеет очень малую величину. Местом монтажа дополнительных полюсов определен промежуток между главными полюсами, а крепление к станине выполняется специальными болтами. Величина воздушной прослойки под ними существенно превышает зазор под главными полюсами. Его регулировка выполняется при помощи специальных пластин из материалов магнитного или немагнитного типа, а окончательная величина определяется, когда тяговый двигатель постоянного тока настраивается на коммутацию при достижении минимального количества искр.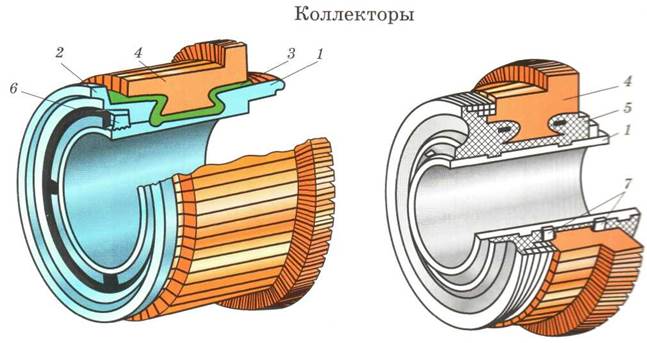
Якорь и коллектор
В состав якоря входит вал, сердечник, обмотки и коллектор. Конфигурация сердечника выполнена в форме цилиндра, а сам он изготовлен из тонких штампованных листов электротехнической стали. Для изоляции листов используется лак или бумага. В сжатом виде после сборки сердечник фиксируется нажимными шайбами. Благодаря устройству сердечника, удается компенсировать влияние вихревых токов и снизить в нем утечку электроэнергии. Охлаждение ТЭД выполняется за счет специальных каналов вентиляции, устроенных в сердечнике.
Для якорных обмоток используется медный проводник круглого или прямоугольного сечения. Он закладывается в выемки сердечника и качественно изолируется от него. Вся обмотка делится на секции, концы каждой из них соединяются с коллектором путем пайки.
В конструкцию каждого коллектора входит активная составляющая и система крепления. Изоляция медных коллекторных пластинок (7) выполняется с помощью специальных прокладок. Провода якорной обмотки припаиваются к выступу в конце элемента (5). Край пластин, расположенный снизу (6) после сборки зажимается с помощью двух нажимных колец (3). Эти кольца также изолируются, а сама изоляция утапливается на 1,5 мм внутрь скользящей поверхности коллектора.
Край пластин, расположенный снизу (6) после сборки зажимается с помощью двух нажимных колец (3). Эти кольца также изолируются, а сама изоляция утапливается на 1,5 мм внутрь скользящей поверхности коллектора.
Тяговые электродвигатель асинхронного типа
На железнодорожном транспорте асинхронный тяговый двигатель долгое время не мог использоваться из-за отсутствия в электроснабжении подвижного состава переменного трехфазного тока. Постепенно развивающееся электротехническое производство позволило создать и усовершенствовать электронику полупроводникового типа.
Таким образом, были созданы преобразователи тока и напряжения, обладающие мощностью, достаточной, чтобы обеспечить энергией асинхронный тяговый двигатель. Ведущую роль в этом деле сыграли мощные транзисторы.
Данные устройства оказались просты и надежны в эксплуатации. У них заметно снизились габаритные размеры и вес в сравнении с двигателями постоянного тока. Асинхронный тяговый двигатель не требует особого технического обслуживания, способен переходить в генераторный режим без специального переключения, а лишь под действием повышенной частоты вращения ротора. Подобная схема существенно упрощает использование системы электрического торможения.
Подобная схема существенно упрощает использование системы электрического торможения.
Общие сведения об устройстве тяговых двигателей постоянного и пульсирующего тока
§ 29. Общие сведения об устройстве тяговых двигателей постоянного и пульсирующего тока
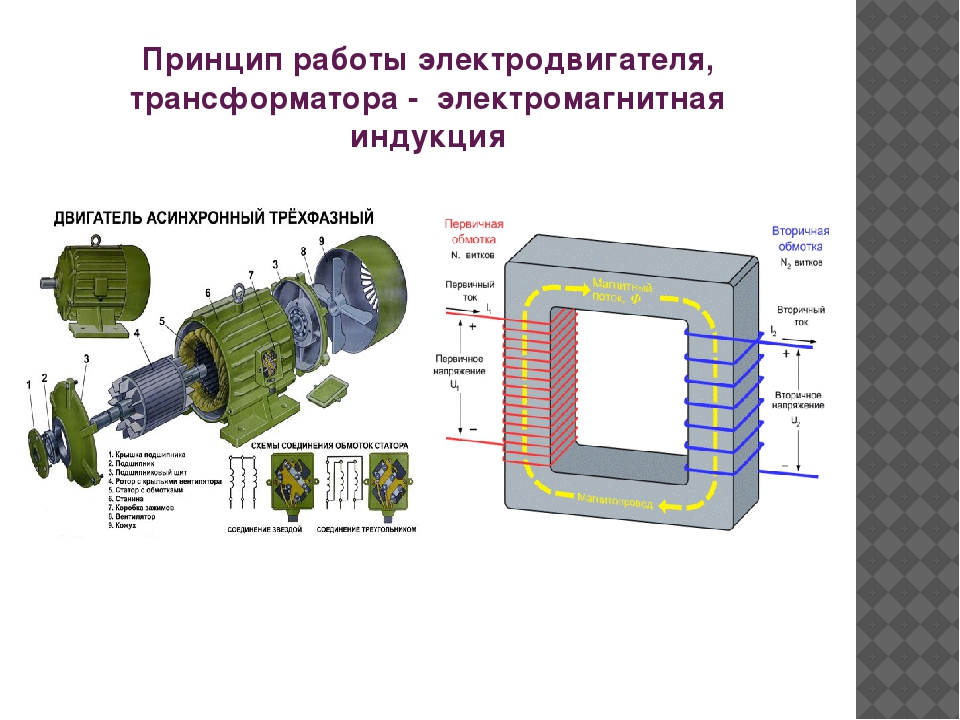
| Принцип работы тягового двигателя постоянного тока основан на использовании явления электромагнитной индукции. Его конструкция в отличие от большинства промышленных машин постоянного тока обусловлена тяжелыми и своеобразными условиями работы и типом тяговой передачи. Однако все тяговые двигатели постоянного и пульсирующего тока имеют много общего в части возбуждения и конструктивного исполнения. Большинство тяговых двигателей выполнено с последовательным возбуждением, которое, как известно, позволяет получать мягкие характеристики. У двигателей с последовательным возбуждением при возрастании нагрузки, например вдвое, частота вращения их якорей уменьшается до 70% первоначальной, а потребляемая ими мощность возрастает лишь на 0,25%. Скоростные характеристики таких двигателей называют мягкими. В двигателях с параллельным возбуждением с увеличением нагрузки на их валах вдвое ток и мощность также возрастают вдвое Поэтому их скоростные характеристики называют жесткими.
У двигателей с последовательным возбуждением при возрастании нагрузки, например вдвое, частота вращения их якорей уменьшается до 70% первоначальной, а потребляемая ими мощность возрастает лишь на 0,25%. Скоростные характеристики таких двигателей называют мягкими. В двигателях с параллельным возбуждением с увеличением нагрузки на их валах вдвое ток и мощность также возрастают вдвое Поэтому их скоростные характеристики называют жесткими.
У двигателей последовательного возбуждения вследствие квадратичной (до насыщения) зависимости вращающего момента от нагрузки довольно просто регулировать режимы работы и мощность При увеличении нагрузки значительно увеличивается вращающий момент и уменьшается частота вращения, а при снижении ее уменьшается вращающий момент, но увеличивается частота, т е. автоматически регулируется мощность двигателя, в то время как у двигателя с параллельным возбуждением требуется регулировать ток возбуждения для изменения частоты вращения На же-
лезных дорогах Советского Союза и зарубежных имеются опытные электровозы с независимым и смешанным возбуждением тяговых двигателей.
Колебания напряжения в контактной сети, неизбежные в условиях эксплуатации, значительно меньше отражаются на работе двигателей с последовательным возбуждением, чем с параллельным. У двигателя с последовательным возбуждением габаритные размеры катушек значительно меньше, чем у двигателя с параллельным возбуждением. Напряжение на зажимах последовательной обмотки составляет всего несколько процентов от напряжения на коллекторе, в то время как на зажимах параллельной обмотки оно равно полному напряжению, приходящемуся на двигатель. Поэтому для параллельной обмотки требуется изоляция, выдерживающая большее напряжение, а следовательно, и более дорогая.
Магнитный поток двигателя с параллельным возбуждением возрастает медленно; при включении двигатель хуже переносит различные переходные процессы. При одном и том же токе в зоне больших нагрузок (что соответствует режиму пуска) двигатель с последовательным возбуждением имеет больший вращающий момент, чем двигатель с параллельным возбуждением при той же мощности.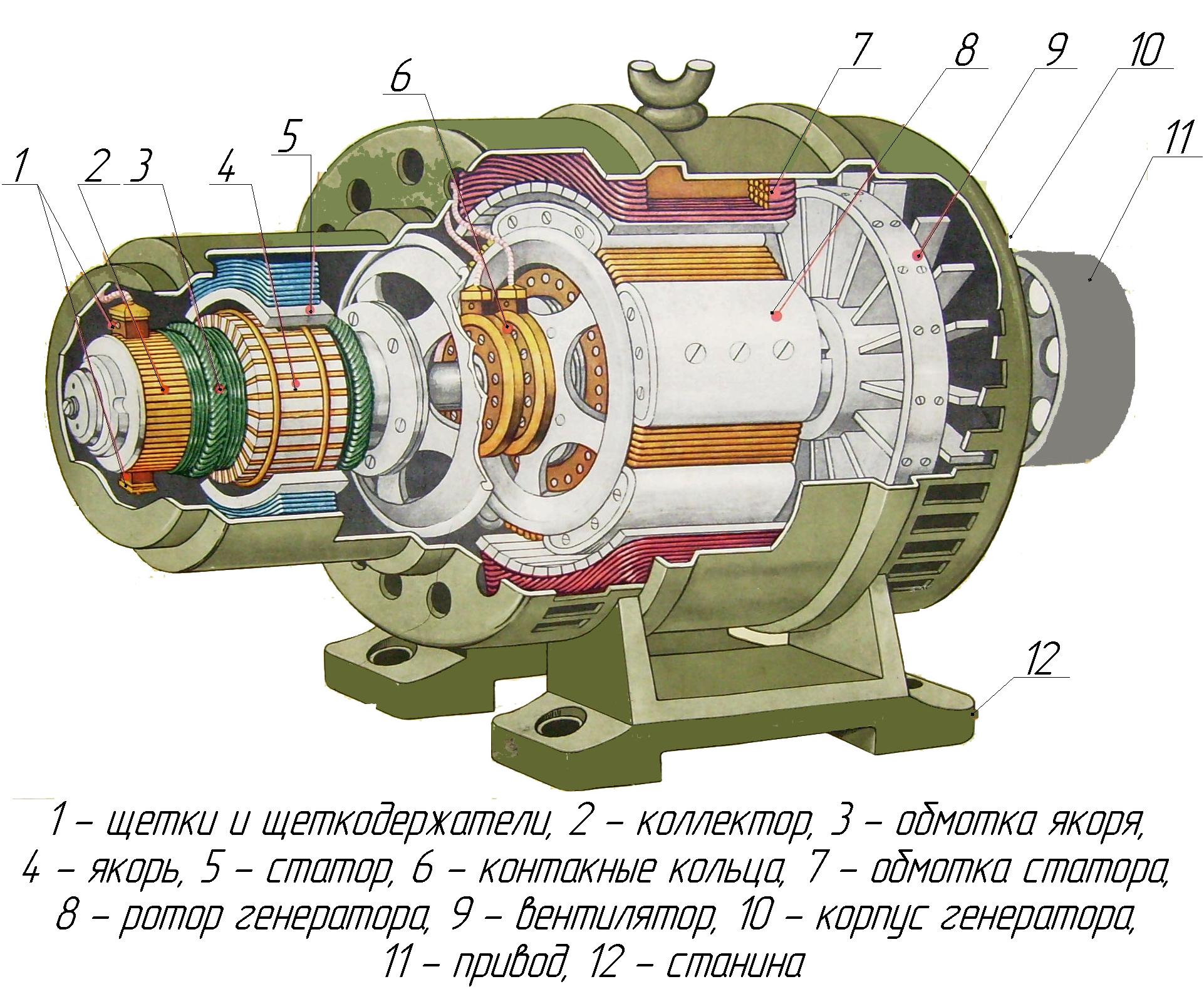 Габаритные размеры двигателя с параллельным возбуждением будут больше, так как при максимальной силе тяги он потребляет значительно больший ток, чем двигатель с последовательным возбуждением, и, следовательно, значительно больше нагреваются его узлы. При параллельной работе нескольких таких двигателей расхождение в нагрузках, вызванное неизбежной разницей свойств материалов, применяемых при изготовлении двигателей, допусков на обработку и сборку отдельных деталей и узлов, разницей в диаметрах бандажей колесных пар и т. д., может оказаться недопустимо большим. При двигателях с последовательным возбуждением эта разница будет незначительной.
Габаритные размеры двигателя с параллельным возбуждением будут больше, так как при максимальной силе тяги он потребляет значительно больший ток, чем двигатель с последовательным возбуждением, и, следовательно, значительно больше нагреваются его узлы. При параллельной работе нескольких таких двигателей расхождение в нагрузках, вызванное неизбежной разницей свойств материалов, применяемых при изготовлении двигателей, допусков на обработку и сборку отдельных деталей и узлов, разницей в диаметрах бандажей колесных пар и т. д., может оказаться недопустимо большим. При двигателях с последовательным возбуждением эта разница будет незначительной.
Однако тяговые двигатели с последовательным возбуждением склонны к бок-сованию, а при использовании их на э.п.с. с рекуперативным и рекуперативно-реос-
татным торможением необходим специальный возбудитель для независимого питания обмоток при рекуперации. Все это приводит к увеличению как эксплуатационных расходов, так и капитальных вложений на изготовление электровозов с тяговыми двигателями последовательного возбуждения.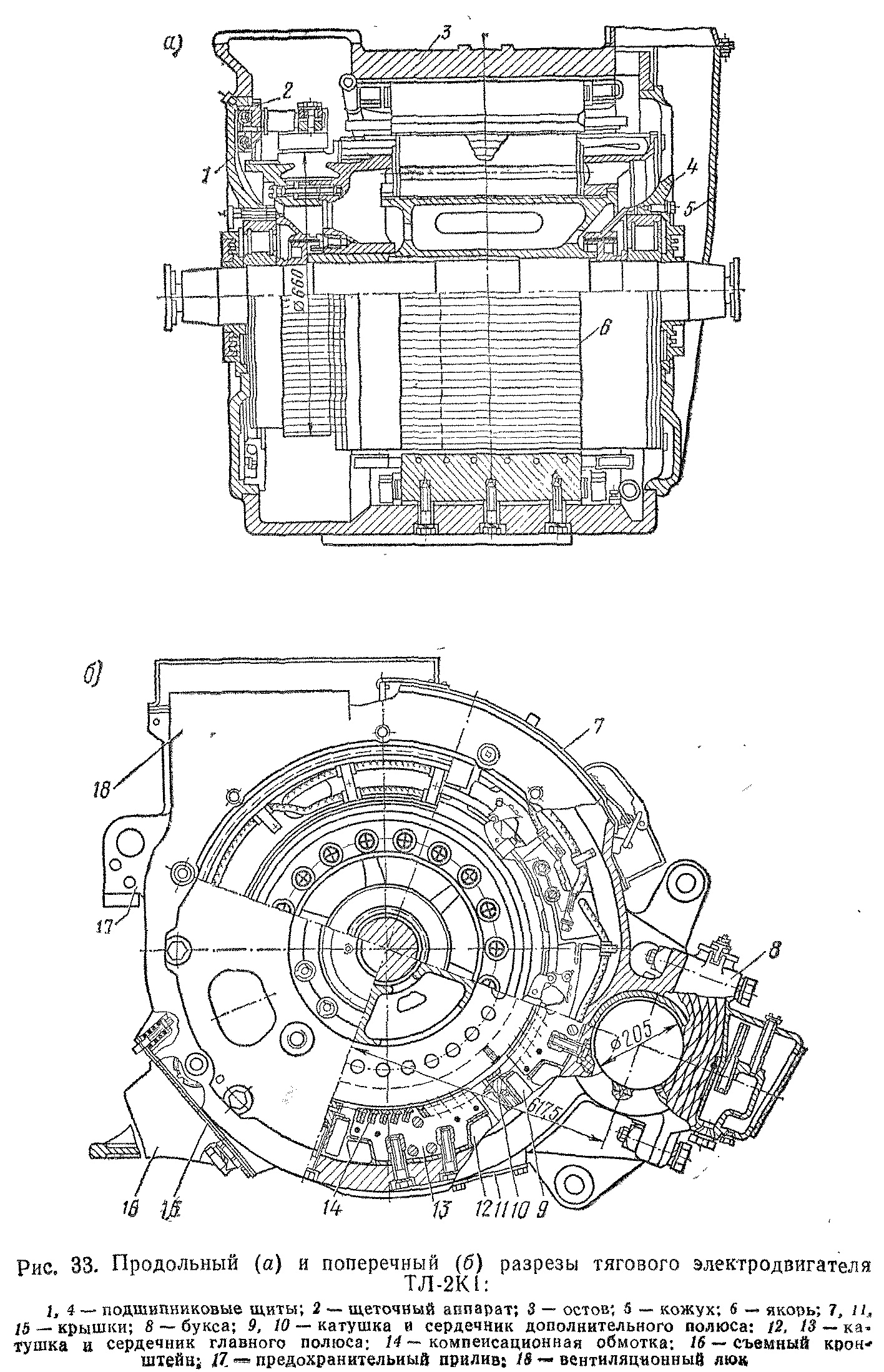
На современных локомотивах мощность тяговых двигателей и электровоза регулируют не ступенчато, а плавно, используя тиристоры В этом случае, применяя независимое или смешанное возбуждение тяговых двигателей, можно значительно расширить пределы регулирования мощности электровоза по сравнению с имеющимися при тяговых двигателях последовательного возбуждения. Принципиально независимое и смешанное возбуждение тяговых двигателей возможно осуществить на электровозах как постоянного, так и переменного тока (подробно см. § 83).
Все тяговые двигатели выполняют закрытого типа с независимой вентиляцией (на электровозах) либо самовентилирующимися (на моторных вагонах) Основными узлами каждого тягового двигателя постоянного и пульсирующего тока являются: остов, главные и добавочные (дополнительные) полюса, якорь, щеткодержатели с кронштейнами, подшипниковые щиты. Двигатели с опорно-осевым подвешиванием имеют еще шапки моторно-осевых подшипников, а самовентилирующиеся — вентиляторы.
Размеры каждого тягового двигателя, его масса, эксплуатационные и экономические показатели при заданных мощности двигателя в часовом режиме, напряжении на зажимах, напряжении на изоляцию и др.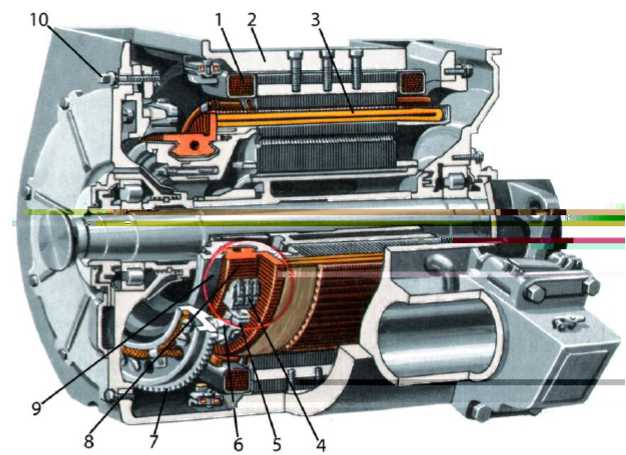 ном — номинальная расчетная сила тяги колесной пары, кН; V ном — номинальная расчетная скорость, км/ч; т| „ — к.п.д. тяговой передачи (для одноступенчатой зубчатой передачи т) „ = 0,975).
ном — номинальная расчетная сила тяги колесной пары, кН; V ном — номинальная расчетная скорость, км/ч; т| „ — к.п.д. тяговой передачи (для одноступенчатой зубчатой передачи т) „ = 0,975).
Сила тяги /•’ном = фР 0 зависит от заданной нагрузки движущей колесной пары на рельсы Р 0 и коэффициента сцепления ф, номинальная скорость — от назначения локомотива. К выбору расчетных значений силы тяги и скорости подходят очень тщательно. Если сила тяги несколько занижена, двигатели будут часто работать с перегрузкой. При завышении расчетной скорости увеличивается необходимая мощность двигателя и коммутационной аппаратуры, что повышает их массу и размеры.
⇐Предыдущая Оглавление Следующая⇒
Принцип работы тягового двигателя ДК-117 ДМ в моторном режиме. — Студопедия
Вокруг любого проводника с током образуется магнитное поле. Если проводник с током поместить внутрь другого магнитного поля, то в результате взаимодействия двух магнитных полей образуется выталкивающая сила F, направление которой определяется по Правилу левой руки:
Если ладонь левой руки расположить так, чтобы магнитные силовые линии входили в ладонь, а 4 пальца указывали направление тока в проводнике, то отогнутый большой палец укажет направление действия выталкивающей силы.
Принцип работы тягового двигателя ДК-117 ДМ в генераторном режиме.
При работе двигателя обмотки якоря пересекаются с магнитными силовыми линиями, исходящими от обмоток возбуждения (главных полюсов). При этом в обмотках якоря наводится ЭДС, направленная против приложенного напряжения, поэтому её часто называют противо-ЭДС. Её направление определяется по Правилу правой руки.Применительно к двигателю оно выглядит так:
Если ладонь правой руки расположить так, чтобы в неё входили силовые линии магнитного поля от обмоток возбуждения, а отогнутый большой палец направить по направлению вращения якоря, то 4 вытянутых пальца укажут направление противо-ЭДС ( ЭДС для генератора).
Технические характеристики и основные неисправности тягового двигателя ДК-117 ДМ.
● часовая мощность — 114 кВт
● максимальная частота вращения – 3250 об/мин (испытательная – 4850 об/мин)
● общее сопротивление всех обмоток – примерно 0,07 Ом (0,069 Ом)
(якорь — 0,0285 Ом; главные полюса — 0,0312 Ом; дополнительные полюса — 0,0094 Ом)
● нажатие на щётку – 2-3 кгс, разница силы нажатия щёток в одном держателе – 0,3 кгс
● минимальная высота щётки – 25мм
● минимальная площадь прилегания щётки к коллектору – 75%
● максимально допустимый обрыв жил шунта щётки – 10%
● максимальный нагрев якорных подшипников – 100 0С (подшипниковых щитов — 55 0С)
● масса – 760 кг.
● наработка «на отказ» — 4 500 000 км.
— пробоя изоляции обмоток якоря;
— пробоя изоляции обмоток главных и дополнительных полюсов;
— повреждения пальцев, кронштейнов и щеткодержателей;
— кругового огня по коллектору
устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.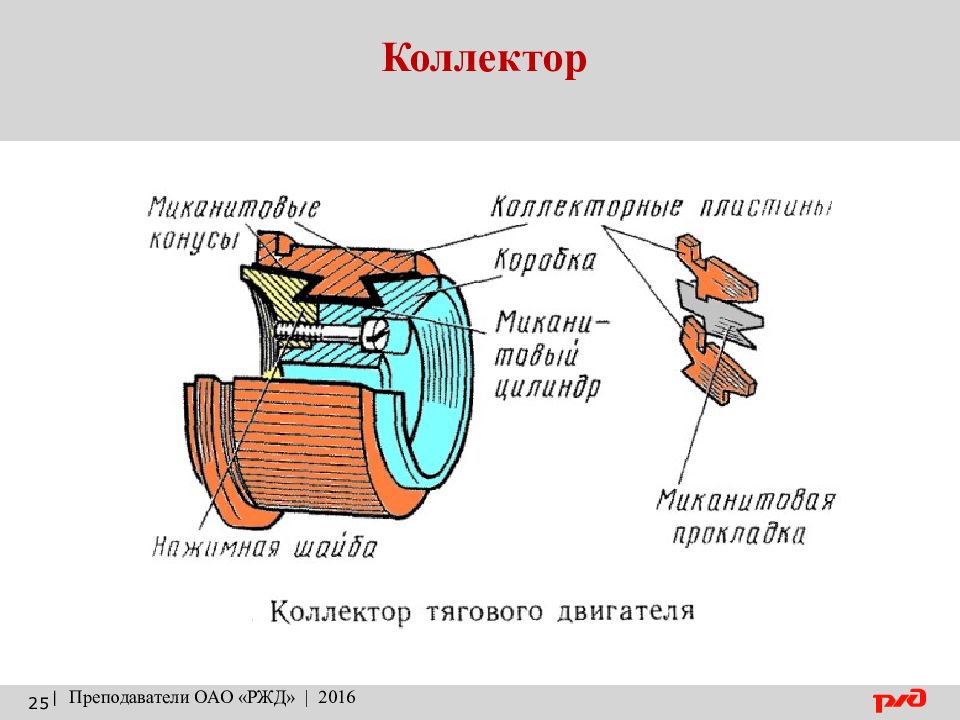
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.

- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.

Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.

Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмоткамиРисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора.
 В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.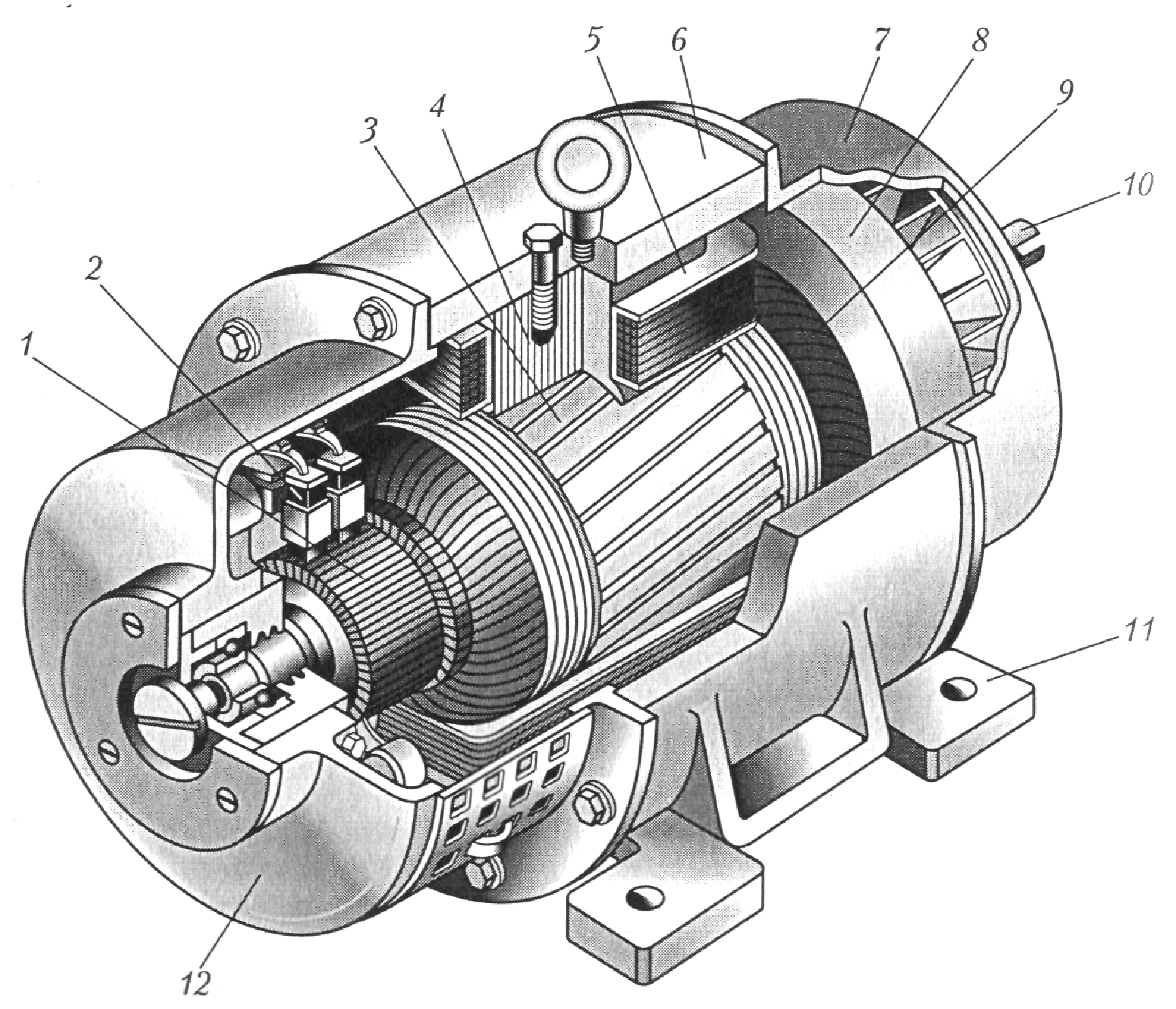
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.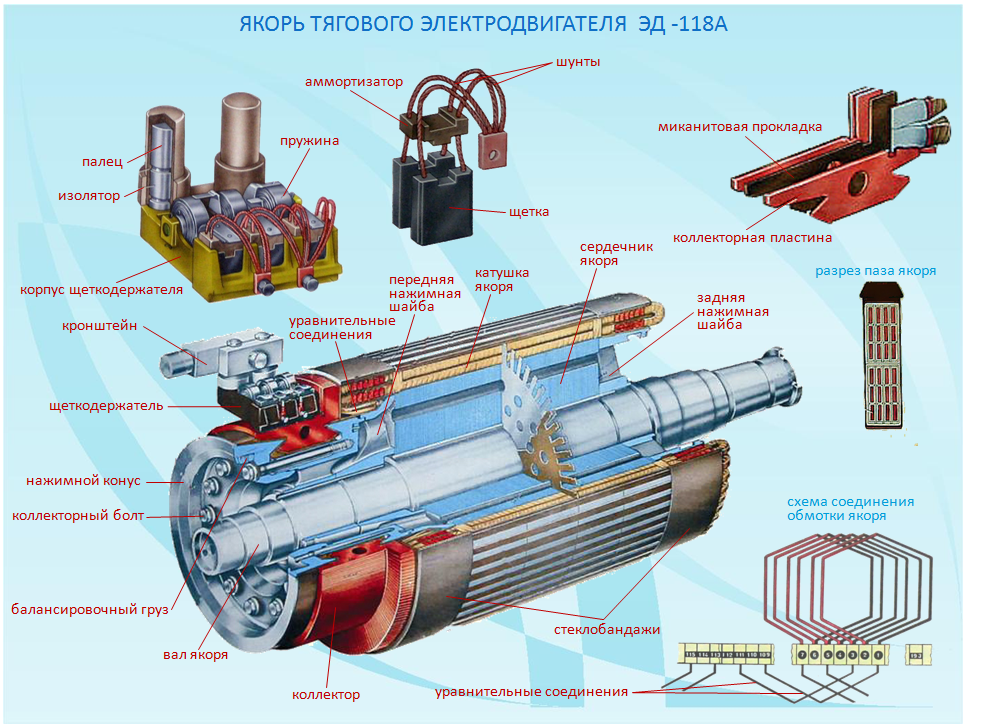
Видео в дополнение к написанному
Двигатель электромобиля — принцип работы, устройство, виды
По планам многих автоконцернов – именно за тяговым двигателем для электромобиля – будущее. Так известно, что в плане развития известного гиганта Bentley Motors значится, что к 2030-му году компания полностью трансформируется в производителя электроавтомобилей. На электродвигатели ставки также делают такие известные на весь мир компании, как Nissan, Volvo, Aston Martin.
Так известно, что в плане развития известного гиганта Bentley Motors значится, что к 2030-му году компания полностью трансформируется в производителя электроавтомобилей. На электродвигатели ставки также делают такие известные на весь мир компании, как Nissan, Volvo, Aston Martin.
Тенденции таковы, что в массовом производстве сейчас больше представлены легковые электромобили и городской электротранспорт (согласно планам, в ряде таких стран как, к примеру, Франция и Норвегия в 2025-2030-м гг. автобусы в городах будут полностью заменены на электротранспорт).
Но чувствуется интерес и к установке электромоторов на грузовой транспорт. Особенно электродвигатели интересны производителям городских развозных фургонов, терминальных тягачей и коммунальных грузовиков.
На весь мир уже хорошо известен седельный тягач капотного типа Tesla Semi, в коммунальном хозяйстве США активно не первый год используют мусоровозы PETERBILT на электротяге, в Евросоюзе возрастает интерес к седельному тягачу с электродвигателем Emoss Mobile Systems B. V. и Renault Trucks –развозному автомобилю для продуктов.
V. и Renault Trucks –развозному автомобилю для продуктов.
На постсоветском пространстве свой коммерческий электротранспорт пока только начинает появляться, но уже активно говорят про грузовик МАЗ-4381Е0 (на грузовике установлен асинхронный тяговый электродвигатель мощностью 70 кВт (95 л.с.), ориентированный на транспортировку грузов в черте города, и электрогрузовик Moskva опытно-конструкторского бюро Drive Electro (главное назначение — доставка товаров в магазины). Не за горами время, когда этот коммерческий транспорт с электромоторами будет активно востребован автопарками, логистическими центрами, предприятиями.
Также, безусловно, давно, как данность мы принимаем, что на электродвигателе работают трамваи, троллейбусы, погрузчики на складах и локомотивы. Трёхфазный асинхронный двигатель помогает двигаться на давно полюбившихся поездах «Ласточка» и «Сапсан».
Принцип работы
Принцип работы двигателя электромобиля основан на преобразовании электроэнергии в механическую энергию вращения.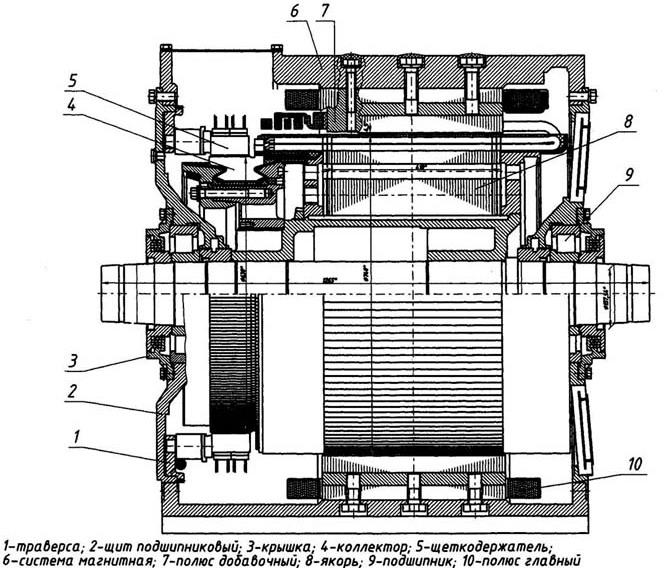 Главные участники преобразования энергии – статор и ротор.
Главные участники преобразования энергии – статор и ротор.
Как работает традиционный электромотор?
- Магнитное поле статора действует на обмотку ротора.
- Возникает вращающий момент.
- Ротор начинает двигаться.
Наглядная схема двигателя электромобиля в системе электропривода представлена ниже:
Важная особенность классического электрокара – отсутствие дифференциала, коробки передач, передаточных устройств с шестеренками. Энергия от электромотора поступает прямо на колеса.
Без коробки передач – и большинство «гибридов» с электродвигателем и ДВС. Исключение – «гибриды» с параллельной схемой передачи на колёса крутящего момента. К ней мы ещё вернёмся в этой статье в разделе, посвящённом гибридным автомобилям.
Принцип работы любого электродвигателя базируется на процессах взаимного притяжения и отталкивания полюсов магнитов на роторе и статоре. Движение осуществляется под действием самого магнитного поля и инерции.
Устройство
Как устроен двигатель электромобиля?
При описании принципа работы электродвигателя, уже было упомянуто, что главные компоненты двигателя электромобиля– ротор и статор.
- Ротор – это вращающийся компонент двигателя.
- Статор находится в неподвижном состоянии. Он ответственен за создание неподвижного магнитного поля.
Ротор
Классический ротор автомобиля состоит из сердечника, обмотки и вала. У некоторых электродвигателей в состав ротора также входит коллектор.
- Сердечник – это металлический стержень, на периферии которого располагается обмотка. Непосредственно через сердечник происходит замыкание магнитной цепи электродвигателя. Сердечник изготавливается из стальных пластин круглой формы. По структуре похож на слоёный пирог. При производстве сердечников используют изолированные листы стали с присадками кремния. В этом случае обеспечены увеличение КПД электродвигателя, наименьшие удельные потери в металле на единицу массы, снижение величины размагничивающих вихревых токов Фуко, которые возникают из-за перемагничивания сердечника. На поверхности сердечника есть продольные пазы. Через них прокладывается обмотка.
- Вал – металлический стержень, который непосредственно передаёт вращающий момент. Также изготавливается из электротехнической стали. Служит основой для насаживания сердечника. На концах вала есть резьба, выемки под шестерёнки, подшипники качения, шкивы.
- Коллектор – блок, крепящийся на валу. Представляет собой систему медных пластин. Изолирован от вала. Служит выпрямителем переменного тока, переключателем-автоматом направления тока (в зависимости от вида электродвигателя).
 Также изготавливается из электротехнической стали. Служит основой для насаживания сердечника. На концах вала есть резьба, выемки под шестерёнки, подшипники качения, шкивы.
Также изготавливается из электротехнической стали. Служит основой для насаживания сердечника. На концах вала есть резьба, выемки под шестерёнки, подшипники качения, шкивы.Статор (индуктор)
Статор состоит из станины, сердечника и обмотки:
- Станина статора – корпус статора. Как правило, корпус бывает алюминиевым или чугунным. Алюминиевые станины популярны у электродвигателей легковых авто, чугунные – у спецтехники, которая вынуждена работать в условиях высокой вибрации. Станина служит базой крепления основных и добавочных полюсов.
- Сердечник статора – цилиндр из профилированных стальных листов. Фиксируется винтами внутри станины. Снабжён пазами для обмотки.
- Обмотка. Создаёт магнитный поток. При пересечении проводников ротора наводит в них электродвижущую силу.

Виды
Электродвигатели классифицируют по типу питания привода, конструкции щеточно-коллекторного узла, количеству фаз для запитывания:
- По типу питания привода. Устройства делятся на моторы переменного и постоянного тока. Двигатели постоянного тока способны обеспечить более точную и плавную регулировку оборотов, высокий КПД. Двигатели переменного тока выручают, когда важна высокая перегрузочная способность. Это удачный вариант для подъёмно-транспортных машин. Впрочем, существуют и универсальные моторы, которые функционируют от переменного и постоянного тока.
- По конструкции щеточно-коллекторного узла. Выпускаются бесколлекторные и коллекторные моторы. Бесколлекторный мотор работает за счёт движения ротора с постоянным магнитом. У конструкции нет щеточно-коллекторного узла. Решение обеспечивает достойный крутящий момент, широкий диапазон скоростей и высокий КПД. Важные преимущества бесколлекторного мотора – надёжность, способность к самосинхронизации, возможность подпитываться при переменном напряжении. Ресурс бесколлекторного мотора ограничен исключительно ресурсом подшипников. У коллекторных моторов присутствует щелочно-коллекторный узел. Удобство решения связано с тем, что он может использоваться и в качестве переключателя тока в обмотках, и как извещатель положения ротора, нет необходимости в контролле. Проблема коллекторных моделей – в том, что они зависимы от постоянных магнитов, которые, как известно, со временем, к огромному сожалению, теряют свои свойства.
- По количеству фаз для запитывания. В зависимости от того, как запитывается обмотка, электродвигатели бывают однофазными и трёхфазными. В автомобилестроении широкое распространение получили трёхфазные решения, это связано с рядом технических характеристик (мощность, перегрузочная способность, частота вращения на холостом ходу).
Обратите внимание! Работать трёхфазные моторы могут синхронно и асинхронно, а в качестве ротора используются как короткозамкнутые, так и фазные модели. Самый популярный вариант – трехфазные асинхронные моторы с короткозамкнутым ротором. Они стоят на большинстве современных электрокаров.
Асинхронные и синхронные двигатели
Синхронные моторы – двигатели переменного тока, у которых частота вращения ротора идентична частоте вращения магнитного поля (измерение производится в воздушном зазоре). В автомобилестроении синхронные моторы встретить можно нечасто (хотя в мире техники – это, в целом, очень популярное решение – особенно в климатотехнике, насосных системах).
Но есть производители авто, которые при производстве электрокаров предпочитают устанавливать на свои машины именно синхронные двигатели. Яркий пример – концерн Renault. Синхронными двигателями на электромагнитах он оснастил электрокар Renault Zoe. На электромагниты подаётся постоянный ток. Полярность магнитов ротора стабильна. Полярность магнитов статора при этом изменяется и обеспечивает бесперебойное вращение.
Преимущество синхронных двигателей на электромагнитах у авто – максимальная оптимизация рекуперации энергии торможения. И главный «конёк» авто с таким типом электродвигателя – полная безопасность при буксировке.
Гораздо более популярный вариант – асинхронные двигатели. Это двигатели переменного тока, у которых потенциал напряжения – магнитного поля не совпадает с частотой вращения ротора. Типичным 3-фазным асинхронным двигателем оснащены, например, хорошо известные автомобили Tesla S и Tesla Х.
Иногда асинхронные моторы называют индукционными, так как в роторе в соответствие с законом Ленца у них индуцируется электромагнитная сила.
Двигатель-колесо
Обособленно среди электромоторов стоит двигатель-колесо. Особенность двигателя- колеса – ориентир крутящего момента и силы напряжения на конкретное колесо.
Такие решения можно встретить в плагин-гибридных автомобилях («гибридах» с параллельной схемой, при описании устройства гибридных авто ниже по тексту мы остановимся на них подробнее). Работает двигатель-колесо в паре с ДВС.
У первых плагин-гибридных автомобилей с двигателем-колесом агрегат был монтирован в ступицу колеса, а работа осуществлялась исключительно в паре с внутренним зубчатым редуктором.
Некоторые же современные модели моторов, монтируемые внутри колёс, вполне могут работать без зубчатого редуктора. Это увеличивает управляемость, позволяет избежать увеличения удельного веса шасси, уменьшить риски, повышает КПД.
Преимущества и недостатки электродвигателей
Преимуществ у электродвигателей существенно больше, нежели недостатков. Более того, за счёт усовершенствования и конструктивных особенностей самих электроприводов, и инфраструктуры, связанной с зарядкой, многие вещи, которые вчера ещё казались критичными, сегодня теряют свою актуальность.
Преимущества
- Не требуется «раскачка». Крутящий момент достигает максимума непосредственно при включении. Именно по этой причине электрический двигатель электромобиля не требует наличия стартеров и сцеплений – неотъемлемых спутников ДВС.
- Удобство. Для включения заднего хода (то есть коррекции со стороны вращения мотора) достаточно поменять полярность, сложная коробка передач не требуется.
- Высокий КПД. У машин с электродвигателями он достигает 95 %.
- Независимость. На любой отметке скорости достигается максимальный показатель крутящего момента.
- У мотора – малый вес. Производители могут себе легко позволить создавать компактные автомобили.
- Есть все возможности для рекуперации энергии торможения. Если у авто с ДВС кинетическая энергия просто уходит в колодки (и стирает их), то у электромобиля в режиме рекуперации мотор может функционировать как генератор. В режиме генерации электроэнергия просто трансформируется в другую форму и быстро накапливается в АКБ. Особенно решение эффективно для транспортных средств с длинным тормозным путем. На объём генерируемой и накопленной энергии существенно влияет маршрут (рельеф, в частности наличие холмистых участков на дороге и уклон дороги).
- Снижение расходов на эксплуатацию машины. Зарядку можно производить от электросети. Это существенно дешевле, нежели использование дизеля, бензина. Выгода очевидна даже по сравнению с бензиновыми авто эконом-класса.
- Малый уровень шума.
- В большинстве случаев для мотора не требуется принудительное охлаждение.
- Экологичность. Использование транспорта с электродвигателем снижает количество выхлопных газов в воздухе.
Недостатки
Долгое время считалось, что самый большой минус использования электродвигателя – его зависимость от аккумуляторов, которые быстро выходят из строя. Теперь это неактуально. Современные батареи электрокаров, представленных в массовом выпуске, гарантируют пробег автомобиля 150-200 тыс. км. Потерял актуальность и тот фактор, что машины с электродвигателем существенно уступают бензиновым по мощности. Электротяга современных электромоторов уже не уступает ДВС.
Поэтому недостатки электродвигателей сейчас правильно свести не к недостаткам конструкции, а к плохо развитой инфраструктуре для того, чтобы подзаряжать электромобили. Если в США, Скандинавии подзарядить электрокар легко, то до недавнего момента даже в Западной и Центральной Европе с инфраструктурой для подзарядки таких машин были проблемы.
В России, Беларуси, Украине, Казахстане, пока, увы, с инфраструктурой ситуация ещё хуже. Хотя, например, в России число заправок для электрокаров с 2018 по 2020 год возросло в 3 раза, но полотно покрытия площадками для зарядки очень неоднородное. В Москве – более плотное, в регионах – слабое. Даже разрыв с такими городами-гигантами как Санкт-Петербург и Челябинск — колоссальный.
Устройство электромобиля
Рассматривая электродвигатель, важно остановиться на устройстве электромобиля в целом, изучение электродвигателя не самого по себе, а как части системы электропривода, где электродвигатель – один из его базовых компонентов, его «сердце». Но «организм», функционирует только тогда, когда в порядке все другие «органы» – части электропривода:
- Аккумуляторная батарея.
- Бортовое зарядное устройство. Его функция – обеспечение возможности заряжать аккумуляторную батарею от бытовой электрической сети.
- Трансмиссия. Распространены трансмиссия с одноступенчатым зубчатым редуктором (чаще всего встречающийся и наиболее простой вариант) и бесступенчатая трансмиссия с гидротрансформатором (для старта с места), плавно изменяющие отношение скоростей вращения и вращающих моментов мотора и ведущих колес транспортного средства во всём рабочем диапазоне скоростей и тяговых усилий.
- Инвертор. Назначение инвертора – трансформирование высокого напряжения постоянного тока аккумулятора в трехфазное напряжение переменного тока.
- Преобразователь постоянного тока. Функция – зарядка дополнительной батареи, которая используется для системы освещения, кондиционирования, аудиосистемы.
- Электронная система управления (блок управления). Отвечает за управление функциями, связанными с энергосбережением, безопасностью комфортом. В её «подчинении» – оценка заряда АКБ, оптимизация режимов движения, регулирование тяги, контроль за использованной энергией и за напряжением, управлением ускорением и рекуперативным торможением.
Аккумуляторная батарея
Аккумуляторная батарея (аккумулятор) – один из наиболее дорогих компонентов системы. По своей значимости играет такую же роль, как бензобак для ДВС. Электромобиль движется за счёт электричества, полученного от электросети во время зарядки и хранящегося в АКБ.
При этом важно помнить, что у большинства электромобилей устанавливаются одновременно два аккумулятора: один тяговой – он питает именно мотор и стартерный (как и в машинах с ДВС, он помогает системе освещения, системе подогрева). Эти аккумуляторы разные не только по назначению, но и техническим характеристикам.
Тяговый аккумулятор электрического двигателя электромобиля предназначен для питания мотора, запуска двигателя. У него нет высокого пускового тока, но он заточен на длительную работу, выдерживает большое количество циклов заряда-разряда.
Типичная тяговая АКБ – моноблочная секционная конструкция. Тяговая АКБ состоит из толстых электронных пластин – пористых сепараторов и электролитного вещества.
Самые распространенные аккумуляторы – литий-ионные. У них – наиболее высокая энергетическая плотность, не требуется обслуживание, достаточно низкий саморазряд.
Устройство и особенности гибридных систем
Свои особенности – у гибридных систем. В гибридных системах электродвигатель может рассматриваться и как «партнёр» ДВС, и как допэлемент, помогающий добиться экономии топлива и при этом повышения мощности.
Устройство «гибрида» отличается в зависимости от реализованной схемы передачи на колёса крутящего момента.
- Параллельная. Аккумуляторы передают энергию электромотору, бак – топливо для ДВС. Оба агрегата равноправны и способны создать условия для перемещения авто. Но работает такая схема только при наличии коробки передач. Параллельная схема успешно реализована у автомобиля Honda Civic. Нередко гибриды с параллельной схемой выделяют в отдельную группу и называют плагин-гибридными.
- Последовательная. Любое действие начинается с включения ДВС. Он же отвечает за последующие действия: поворот генератора для запуска электромотора, зарядку аккумуляторов.
- Последовательно-параллельная. Через планетарный редуктор соединены ДВС, электродвигатель и генератор. В зависимости от условий движения может использоваться тяга электродвигателя или ДВС. Режим выбирается программно системой управления транспортного средства. Среди хорошо известных последовательно-параллельных «гибридов» – Toyota Prius, Lexus-RX 400h.
Классический гибридный автомобиль использует интегрированный в трансмиссию электрический мотор-генератор.
При этом для получения электрической тяги у гибридных систем задействованы четыре базовых компонента:
- Мотор-генератор. Является обратимой силовой установкой. Может работать в двух режимах: непосредственно тягового мотора и генератора для зарядки высоковольтной аккумуляторной батареи. При работе в режиме мотора возможно создание крутящего момента и мощности, которых хватит для старта и движения автомобиля с выключенным ДВС, при работе устройства в режиме генератора продуцируется высоковольтная электроэнергия.
- Высоковольтные силовые кабели. Изолированные электрические кабели большого сечения. Важны для переноса энергии между компонентами высоковольтных электроцепей.
- Высоковольтные аккумуляторные батареи. Включенные в последовательную цепь аккумуляторные элементы. Позволяют накопить в батарее большой объём электроэнергии.
- Высоковольтный силовой модуль управления для управления потоком электроэнергии для движения транспортного средства на электрической тяге.
Гибридные авто открывают новые эксплуатационные возможности, с одной стороны можно быть максимально экологичным, радоваться комфортной езде и сэкономить на топливе, а с другой стороны, при разряде аккумулятора владелец авто не попадёт впросак, если невозможно подзарядить мотор: в работу вступит ДВС.
Перспективы применения электродвигателей в автомобилях
Перспективы применения электродвигателей в автомобилях напрямую связаны с тем, насколько активно будет развиваться инфраструктура. Там, где она не обеспечена, использование электрокаров действительно ограничено. Ведь без подзарядки у многих авто – малая дальность пробега.
Впрочем, даже последняя проблема активно решаемая. Немецкие и японские разработчики (компании DBM Energy, Lekker Energie, Japan Electric Vehicle Club) сумели доказать миру: потенциал у электродвигателей, аккумуляторов без подзарядки может достигать 500 -1000 тысяч километров пробега. Правда, пока что 1 000 тысяч км пробега без подзарядки возможны только в теории, а 500-600 уже на практике.
На данный момент доступность такого транспорта – на уровне инженерно-конструкторской работы, экспериментальных выпусков, но есть перспективы что их подхватят автогиганты, и не за горизонтом – серийное производство.
Перспективы применения электродвигателей в автомобилях очень тесно связаны и с политикой отдельных государств. Например, в Норвегии обладатели электромобилей освобождены от уплаты ежегодного налога на транспорт, пользования платными дорогами, паромными переправами и даже большинством парковок. С учётом того, что налоги и тарифы в Скандинавии одни из самых высоких, мотивация приобрести именно авто с электродвигателем, а не ДВС – очень высокая.
Обратите внимание, что на базе LCMS ELECTUDE есть специальный раздел “Электрический привод”, в нём подробно разбираются электродвигатели, виды электропривода, системы зарядки, особенности обслуживания транспорта с электромотором. Кроме комплексных теоретических знаний в обучающих модулях приводятся многочисленные практические примеры.
Двигатель постоянного тока
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
Электродвигатели постоянного тока, намного меньше распространены, нежели двигатели переменного тока. Это связано в первую очередь со сравнительной дороговизной, более сложным устройством, сложностями в обеспечении питания. Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Электродвигатели постоянного тока применяются в качестве тяговых двигателей, в электротранспорте, в качестве различных исполнительных устройств.
Устройство двигателей постоянного тока
Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия. На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока. Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
Принцип действия
Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнит с полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле
Где Ф – магнитный поток возбуждения, n – частота вращения, а Cе это конструктивный момент машины, который остается для нее постоянным.
Напряжение на зажимах больше чем противоЭДС на величину падения напряжение в якорной цепи.
А если домножить это выражение на ток, то получим уравнение баланса мощностей.
Левая часть уравнения UIя представляет собой мощность подаваемая электродвигателю, в правой части первое слагаемое EIя представляет собой электромагнитную мощность, а второе IяRя мощность потерь в цепи якоря.
Рекомендуем прочесть статью — пуск двигателя постоянного тока.
Тяговый электродвигатель постоянного тока | Авто Брянск
Существующие электрические машины способны выполнять множество разных функций. Они преобразуют механическую энергию в электрический ток и наоборот. Подавляющее большинство электрических устройств работают по простой схеме: под действием механической энергии вырабатывается электричество, которое в свою очередь вызывает движение станков, машин, механизмов, подвижного состава. В транспортной отрасли хорошо известен тяговый электродвигатель, приводящий в действие колесные пары вагонов.
Использование этих устройств в режиме генератора дает возможность затормозить состав. Процесс торможения происходит за счет нагрузки, образующейся в процессе превращения механической энергии состава, находящегося в движении, в электрический ток.
Появление и развитие тяговых устройств
В самом начале, когда электрический транспорт только начал использоваться, на всех видах подвижного состава устанавливались коллекторные тяговые электродвигатели. При этом передача энергии осуществлялась по самой простой схеме, поэтому агрегатами можно было легко управлять в любом рабочем режиме. Технические и механические характеристики полностью отвечали всем требованиям транспортной специфики.
Тем не менее, в процессе эксплуатации тяговый электродвигатель постоянного тока обнаружил ряд недостатков. В первую очередь, это сам коллектор, оборудованный подвижными контактами – щетками, требующий регулярного технического обслуживания. Принимаемые меры по снижению искрения, повышению надежности коммутации, во многом усложнили устройство двигателя. В результате, его размеры заметно увеличились, а максимальная скорость вращения осталась на прежнем уровне.
Постепенно развивалось направление силовой техники на основе быстродействующих полупроводников. Это позволило заменить реостатную систему, применяемую в коллекторных агрегатах, импульсной, отличающейся повышенной надежностью и экономичностью. В дальнейшем, в вагонных парах стал устанавливаться асинхронный тяговый двигатель в качестве приводного механизма.
Основными проблемами, с которыми пришлось столкнуться при эксплуатации асинхронных двигателей, считаются сложные регулировки. Определенные трудности возникают при использовании электрического торможения, когда для этих целей служат моторы на основе короткозамкнутого ротора. В данный период идет разработка более современных тяговых приводов на основе синхронных агрегатов, в которых установлен ротор на постоянных магнитах.
Поскольку на железнодорожном транспорте до сих пор широко используются именно коллекторные агрегаты, следует более подробно рассмотреть их общее устройство и порядок работы.
Коллекторный агрегат на постоянном токе
Любой коллекторный агрегат является своеобразной электрической машиной, которая в зависимости от своего предназначения выполняет функции генератора или электродвигателя. Отличительной чертой этих устройств считается соединение якорной обмотки с коллектором.
Основным источником питания коллекторных движков служит постоянный ток. Сейчас уже выпускаются модификации многофункциональных агрегатов с невысокой мощностью, способных работать не только от постоянного, но и от переменного тока.
Стандартный тяговый электродвигатель состоит из коллектора (1), щеток (2), сердечника ротора или якоря (3), сердечника главного полюса (4), обмотки возбуждения (5), станины (6). Кроме того, сюда же включены подшипниковый щит (7), вентилятор (8), якорная обмотка (9).
Все детали соединяются в несколько конструктивных элементов. Прежде всего, это магнитная система, под влиянием которой появляется магнитное поле, а также якорь с обмоткой, вращающийся с помощью подшипников. Коллектор и другие детали разъединяются между собой воздушной прослойкой.
В агрегатах постоянного тока возникновение магнитного поля происходит с участием обмоток возбуждения. Они располагаются на полюсных сердечниках и подключены к постоянному току. Количество полюсов может быть разным, в зависимости от мощности двигателя и его использования в транспортной единице. Их число чаще всего находится в рамках от 2 до 12. Стандартная магнитная система представляет собой монолитную металлическую станину, в которой присутствуют съемные шихтованные сердечники. Чтобы понять, как взаимодействуют узлы и детали между собой, необходимо более подробно рассмотреть устройство каждого компонента.
Назначение и устройство станины
Каждый тяговый электродвигатель оборудуется станиной, используемой прежде всего в качестве магнитопровода, по которому осуществляется прохождение магнитных потоков основных и дополнительных полюсов. Еще она служит местом расположения и крепления полюсов и подшипниковой защиты.
При наличии больших нагрузок станина обычно бывает отлита из стали или сварена из толстых электротехнических стальных листов. Благодаря такой конструкции создается требуемая механическая устойчивость и высокая магнитная проницаемость. Стенки обычно имеют толщину, обеспечивающую установленный уровень магнитной индукции, а ее размеры ориентированы на поперечное сечение главных полюсов и составляют не ниже 50% этого размера.
На представленном рисунке отмечено расположение станины (1), относительно других деталей и компонентов – сердечника полюса (2), катушки обмотки возбуждения (3) и полюсного башмака (4). Между всеми элементами и якорем существует воздушная прослойка (5). Размеры диаметра изнутри станины рассчитываются так, чтобы в этом пространстве мог разместиться якорь, полюса главные и дополнительные и их обмотки.
Тяговый электродвигатель локомотива может иметь стальную литую станину с уменьшенной массой и пониженным поперечным сечением, ориентированным на оси главных полюсов. Это дает возможность равномерно распределить магнитный поток, поступающий к станине от главного полюса.
Частично станина, не выполняющая функции магнитопровода, образует коллекторное пространство с незначительной толщиной стенок, достаточной для обеспечения необходимой механической прочности. В некоторых конструкциях это место закрывается отдельными ребрами жесткости, прикрытыми тонким защитным кожухом.
Главные полюса
Тяговый электродвигатель, работающий на постоянном токе, включает в свою конструкцию обмотку возбуждения, где и появляется магнитодвижущая сила, создающая, в свою очередь, магнитное поле. В состав обмотки входят катушки, надеваемые на сердечники основных полюсов. На стороне сердечника, направленной к якорю, устанавливается полюсный наконечник, он же башмак. С его помощью осуществляется равномерное распределение магнитного потока по всей поверхности якоря. Перечисленные детали отмечены на предыдущем рисунке вместе со станиной.
На практике довольно редко используется схема, включающая в себя полюсный сердечник и полюсный башмак. Как правило, они объединяются в единое целое и образуют главный полюс. За счет этого в сердечнике полюса наступает снижение вихревых потоков, вызываемых действием пульсаций магнитной индукции в наконечниках из-за зубчатой поверхности якоря.
Для сборки полюса используются стальные лакированные листы, которые затем попадают под пресс высокого давления. Сквозь сердечник пропускаются болты или специальные заклепки, чтобы стянуть всю конструкцию. Их равномерное распределение позволяет успешно выдерживать упругость сжатых полос. Крепление полюсов к станине осуществляется с помощью болтов или шпилек.
Назначение и устройство добавочных полюсов
Каждый тяговый электродвигатель мощностью более 1 кВт оборудуется дополнительными полюсами, для того чтобы снизить количество искр, появляющихся на щетках. Их устройство очень простое, включающее в себя сердечник (1) и катушку (2), где использован медный проводник в изоляции. Его сечение рассчитывается по рабочему току двигателя, поскольку эта катушка и обмотка якоря последовательно подключаются друг к другу.
Стальной сердечник изготавливается в виде монолитной конструкции, по причине отсутствия в нем вихревых токов, так как магнитная индукция имеет очень малую величину. Местом монтажа дополнительных полюсов определен промежуток между главными полюсами, а крепление к станине выполняется специальными болтами. Величина воздушной прослойки под ними существенно превышает зазор под главными полюсами. Его регулировка выполняется при помощи специальных пластин из материалов магнитного или немагнитного типа, а окончательная величина определяется, когда тяговый двигатель постоянного тока настраивается на коммутацию при достижении минимального количества искр.
Якорь и коллектор
В состав якоря входит вал, сердечник, обмотки и коллектор. Конфигурация сердечника выполнена в форме цилиндра, а сам он изготовлен из тонких штампованных листов электротехнической стали. Для изоляции листов используется лак или бумага. В сжатом виде после сборки сердечник фиксируется нажимными шайбами. Благодаря устройству сердечника, удается компенсировать влияние вихревых токов и снизить в нем утечку электроэнергии. Охлаждение ТЭД выполняется за счет специальных каналов вентиляции, устроенных в сердечнике.
Для якорных обмоток используется медный проводник круглого или прямоугольного сечения. Он закладывается в выемки сердечника и качественно изолируется от него. Вся обмотка делится на секции, концы каждой из них соединяются с коллектором путем пайки.
В конструкцию каждого коллектора входит активная составляющая и система крепления. Изоляция медных коллекторных пластинок (7) выполняется с помощью специальных прокладок. Провода якорной обмотки припаиваются к выступу в конце элемента (5). Край пластин, расположенный снизу (6) после сборки зажимается с помощью двух нажимных колец (3). Эти кольца также изолируются, а сама изоляция утапливается на 1,5 мм внутрь скользящей поверхности коллектора.
Тяговые электродвигатель асинхронного типа
На железнодорожном транспорте асинхронный тяговый двигатель долгое время не мог использоваться из-за отсутствия в электроснабжении подвижного состава переменного трехфазного тока. Постепенно развивающееся электротехническое производство позволило создать и усовершенствовать электронику полупроводникового типа.
Таким образом, были созданы преобразователи тока и напряжения, обладающие мощностью, достаточной, чтобы обеспечить энергией асинхронный тяговый двигатель. Ведущую роль в этом деле сыграли мощные транзисторы.
Данные устройства оказались просты и надежны в эксплуатации. У них заметно снизились габаритные размеры и вес в сравнении с двигателями постоянного тока. Асинхронный тяговый двигатель не требует особого технического обслуживания, способен переходить в генераторный режим без специального переключения, а лишь под действием повышенной частоты вращения ротора. Подобная схема существенно упрощает использование системы электрического торможения.
Тяговый электродвигатель для электромобиля Tesla Model S
Неотвратимым будущим автомобилестроения, хотим мы того или нет, являются электрические автомобили. Производители авто во всем мире вкладывают огромные средства в их разработку, желая снизить концентрацию вредных веществ выбрасываемых автомобилями традиционными, сделать поездки безопасными и комфортными, а также экономичными. Работа по их созданию проводится в двух направлениях – создание новых моделей и реконструкция серийных, которая более предпочтительна, поскольку менее затратная. Электромобили, по сравнению с традиционными, более надежны, поскольку более просты по конструкции, т.е. отличаются минимумом движущихся частей.
Крупнейшими рынками электрических автомобилей являются сегодня: США и Норвегия, Япония и Германия, Китай и Франция, Великобритания и др. Наша страна пока от производства и использования новых средств передвижения находится в стороне, исключая энтузиастов, разработавших Lada Ellada. Но, это случай пока единичный, поэтому он не в счет, тем более, что собрано авто на импортных комплектующих.
Понятие «электрический автомобиль» означает средство передвижения, приводимое в движение несколькими (или одним) электродвигателями. Теоретически питание мотора может быть от аккумулятора, топливных элементов или солнечных батарей. Тем не менее, большее распространение получил вариант первый. Батарея, питающая двигатель требует зарядки, осуществлять которую можно при помощи внешних источников, рекуперации или генератора, установленного на борту автомобиля. Электродвигатель, являющийся основным элементом электромобиля, питается, как правило, от литий — ионной батареи. Он же, в режиме рекуперации, играет роль генератора, заряжающего батарею.
Назначение тягового электродвигателя
Электродвигатель тяговый (ТЭД) предназначен для приведения в движение транспортного средства, т.е. он преобразует в механическую, энергию электрическую. Их классифицируют по способу питания, роду тока, конструктивному исполнению, типу привода колесных пар. В большинстве экологичных машин: гибридных авто, серийных электромобилях, авто на топливных элементах, которые в наши дни приобретают завидную популярность, они являются основной движущей силой.
В качестве двигателя используют в них моторы тяговые постоянного тока, которые работают в двух режимах – двигательном и генераторном.
Видео: Как устроен двигатель электромобиля Tesla Model S
Принцип работы
Принцип работы электромобиля Golf blue-e-motion с тяговым электродвигателем
В основе их работы лежит принцип электромагнитной индукции, т.е. возникновение в замкнутом контуре электродвижущей силы при изменении магнитного потока. От традиционной машины электромеханической ТЭД отличается большей мощностью, более компактными размерами, а кроме этого, у него более высокий КПД.
По способу питания моторы делятся на двигатели постоянного и переменного тока. По числу фаз – на однофазные (с одной обмоткой, подключаемой к сети однофазной переменного тока), двухфазные (две обмотки, расположенные под углом девяносто градусов), трехфазные (три обмотки с магнитными полями через 120 градусов).
По исполнению конструктивному двигатели могут быть: коллекторными, преимущественно работающие на постоянном токе (универсальные современные могут также работать и на токе переменном), бесколлекторными, синхронными, асинхронными. Наконец, по способу возбуждения они делятся на: двигатели с последовательным, параллельным, последовательно-параллельным возбуждением и от постоянных магнитов.
Основные характеристики тягового электродвигателя электрического автомобиля
В современных авто электродвигатель может быть от переменного или постоянного тока. Основной его задачей является передача на движитель авто крутящего момента. Основными характеристиками ТЭД помимо максимального крутящего момента и мощности, являются: частота вращения, ток и напряжение.
В автомобилях чаще используют коллекторные двигатели (один из них благодаря способности вращаться в обратную сторону, может работать как генератор). Но, в отдельных моделях устанавливают электрические моторы и других типов – магнитоэлектрические моторы, подразделяющиеся на двигатели переменного и постоянного тока. Тяговые двигатели электрические, установленные в электромобилях, от других электромоторов не отличаются по конструкции.
Мотор-колесо
Если вначале использовали один тяговый электродвигатель для электромобиля, редуктор которого соединен с трансмиссией, то сегодня все чаще обращаются к мотор-колесу. Суть концепции состоит в том, что компьютерная программа управляет при помощи отдельных моторов каждым из колес. Главным преимуществом является отсутствие трансмиссии, из-за которой силовая установка теряет значительную часть энергии. Помимо этого удается ликвидировать тормозную гидравлическую систему, функцию которой берут на себя электромоторы, а также отдельные механизмы ESP и ABS.
Тяговый электродвигатель — электрическая машина, преобразующая электрическую энергию в механическую для привода в движение колёсных пар вагонов. Тяговые двигатели используют также для торможения поезда, переводя их в генераторный режим. При этом механическая энергия движущегося поезда преобразуется в электрическую.
Содержание
Развитие конструкции тяговых двигателей тесно связано с совершенствованием конструкции систем управления ими. Исторически подвижной состав всех видов электрического транспорта строился с коллекторными тяговыми двигателями. Это объясняется, в первую очередь, простотой простотой передачи энергии и управления режимами его работы. Такие двигатели обладают удобными для использования на транспорте механическими характеристиками. Однако, коллекторные двигатели имеют и ряд недостатков, связанных, в основном, с наличием коллектора. Коллектор, имеющий подвижные контакты (щетки), требует регулярного обслуживания. Для обеспечения надежной коммутации, снижения искрения усложняется конструкция электродвигателя. Кроме того, это ограничивает максимальную скорость вращения, что приводит к увеличению габаритов двигателя.
Развитие силовой полупроводниковой техники, обладающей высоким быстродействием, позволило в 1960-х — 80-х годах сначала отказаться от реостатной системы управления коллекторными тяговыми двигателями, заменив её более надежной и экономичной импульсной, а затем и перейти к выпуску вагонов с асинхронным тяговым приводом. На отечественных метрополитенах первым серийно выпускавшимся типом вагонов с импульсным регулированием стал тип 81-718/719 в 1991 году, а первым серийно выпускаемым типом вагонов с асинхронными двигателями — «Яуза» 81-720.1/721.1 в 1998 году.
Основными недостатками асинхронных двигателей являются сложность регулирования и сложность осуществления электрического торможения при использовании двигателей с короткозамкнутым ротором. Поэтому в настоящее время разрабатываются конструкции тяговых приводов, использующих синхронные двигатели с ротором на постоянных магнитах, вентильно-индукторные двигатели.
Коллекторные тяговые двигатели
В России существует единая унифицированная серия коллекторных тяговых двигателей постоянного тока, в которую вошли и двигатели электропоездов метрополитена. Все они имеют общий принцип компоновки и много унифицированных узлов и деталей. При изготовлении унифицированных тяговых двигателей можно использовать однотипное станочное оборудование, что снижает их стоимость. На вагонах метрополитена широко используют тяговые двигатели постоянного тока. Такие двигатели обладают хорошими тяговыми характеристиками, сравнительно просты по конструкции и надежны в эксплуатации. По конструкции тяговые двигатели электроподвижного состава существенно отличаются от стационарных двигателей постоянного тока, что объясняется особенностями их расположения и условиями работы. Размеры тягового двигателя, подвешенного под кузовом вагона, ограничены подвагонными габаритами. Диаметр его определяется диаметром колеса, так как должно быть выдержано определенное расстояние от нижней точки двигателя до уровня головки рельсов. Длина тягового двигателя ограничена габаритными размерами тележки. На вагонах установлены четыре тяговых двигателя: по одному на каждую колесную пару. Нумерация их идет по осям, считая от кабины управления. Тяговый двигатель работает в тяжелых условиях, так как на него попадают грязь с железнодорожного полотна, пыль от тормозных колодок, дождь и снег на открытых участках трассы. Поэтому все детали, расположенные в его корпусе, должны быть защищены. Для лучшего отвода тепла, выделяющегося при работе тягового двигателя, на валу якоря установлен вентилятор, засасывающий воздух со стороны коллектора и прогоняющий его через двигатель. В паспорте стационарных электрических машин обычно указывает их номинальную мощность продолжительного режима, то есть такую мощность, которую машина должна отдавать неограниченно долгое время, причем температура его узлов и деталей не должна превышать значений, допускаемых нормами для изоляционных материалов. Режим работы тяговых двигателей резко меняется в зависимости от профиля пути и веса поезда. Это не позволяет характеризовать работоспособность тягового двигателя только значением номинальной мощности продолжительного режима. Поэтому характеристики тяговых двигателей даны для часового и максимального режимов.
Асинхронные тяговые двигатели
Тяговые двигатели ДАТЭ-170 входят в комплект тягового привода КАТП-1, устанавливаемого на вагонах 81-720.1/721.1 и 81-740/741. Их основные параметры:
- Номинальная мощность — 170 кВт
- Минимальное напряжение — 530 В
- Номинальная частота тока статора — 43 Гц
- Номинальная частота вращения — 1290 об/мин
- Максимальная частота вращения — 3600 об/мин
- Масса — 805 кг
Кроме того, в эксплуатации на метрополитенах Казани, Киева, Праги находятся вагоны отечественного производства с асинхронным приводом производства фирмы «Шкода».
Устройство тягового двигателя постоянного тока
Все тяговые двигатели постоянного тока вагонов метрополитена имеют в основном одинаковое устройство. Двигатель состоит из остова, четырех главных и четырех добавочных полюсов, якоря, подшипниковых щитов, щеточного аппарата, вентилятора.
Остов двигателя
Он выполнен из электромагнитной стали имеет цилиндрическую форму и служит магнитопроводом. Для жесткого крепления к поперечной балке рамы тележки на остов предусмотрены три прилива-кронштейна и два предохранительных ребра. В остове имеются отверстия для крепления главных и добавочных полюсов, вентиляционные и коллекторные люки. Из остова двигателя выходят шесть кабелей. Торцовые части остова закрыты подшипниковыми щитами. В остове укреплена паспортная табличка с указанием завода-изготовителя, заводского номера, массы, тока, частоты вращения, мощности и напряжения.
Главные полюсы
Они предназначены для создания основного магнитного потока. Главный полюс состоит из сердечника и катушки. Катушки всех главных полюсов соединены последовательно и составляют обмотку возбуждения. Сердечник набран из листов электротехнической стали толщиной 1,5 мм для Уменьшения вихревых токов. Перед сборкой листы прокрашивают изоляционным лаком, сжимают прессом и скрепляют заклепками. Часть сердечника, обращенная к якорю, выполнена более широкой и называется полюсным наконечником. Эта часть служит для поддержания катушки, а также для лучшего распределения магнитного потока в воздушном зазоре. В тяговых двигателях ДК-108А, установленных на вагонах Е (по сравнению с ДК-104 на вагонах Д), увеличен зазор между якорем и главными полюсами, что, с одной стороны, дало возможность увеличить скорость в ходовых режимах на 26 %, а с другой стороны, уменьшилась эффективность электрического торможения (медленное возбуждение двигателей в генераторном режиме из-за недостаточного магнитного потока). Для увеличения эффективности электрического торможения в катушках главных полюсов кроме двух основных обмоток, создающих основной магнитный поток в тяговом и тормозном режимах, имеется третья — подмагничивающая, которая создает дополнительный магнитный поток при работе двигателя только в генераторном режиме. Подмагничивающая обмотка включена параллельно двум основным и получает питание от высоковольтной цепи через автоматический выключатель, предохранитель и контактор. Изоляция катушек главных полюсов кремнийорганическая. Главный полюс крепится к остову двумя болтами, которые ввертывают в квадратный стержень, расположенный в теле сердечника.
Добавочные полюсы
Они предназначены для создания дополнительного магнитного потока, который улучшает коммутацию и уменьшает реакцию якоря в зоне между главными полюсами. По размерам они меньше главных полюсов и расположены между ними. Добавочный полюс состоит из сердечника и катушки. Сердечник выполнен монолитным, так как вихревые токи в его наконечнике не возникают из-за небольшой индукции под добавочным полюсом. Крепится сердечник к остову двумя болтами. Между остовом и сердечником для меньшего рассеяния магнитного потока установлена диамагнитная латунная прокладка. Катушки добавочных полюсов соединены последовательно одна с другой и с обмоткой якоря.
Якорь
Машина постоянного тока имеет якорь, состоящий из сердечника, обмотки, коллектора и вала. Сердечник якоря представляет собой цилиндр, набранный из штампованных листов электротехнической стали толщиной 0,5 мм. Для уменьшения потерь от вихревых токов, возникающих при пересечении якорем магнитного поля, листы изолируют один от другого лаком. В каждом листе имеется отверстие со шпоночной канавкой для насадки на вал, вентиляционные отверстия и пазы для укладки обмотки якоря. В верхней части пазы имеют форму ласточкиного хвоста. Листы насаживают на вал и фиксируют шпонкой. Собранные листы прессуются между двумя нажимными шайбами. Обмотка якоря состоит из секций, которые укладывают в пазы сердечника и пропитывают асфальтовым и бакелитовым лаками. Чтобы обмотка не выпадала из пазов, в пазовую часть забивают текстолитовые клинья, а переднюю и заднюю части обмотки укрепляют проволочными бандажами, которые после намотки пропаивают оловом. Назначение коллектора машины постоянного тока в различных режимах работы неодинаково. Так, в генераторном режиме коллектор служит для преобразования переменной электродвижущей силы (э.д.с), индуцируемой в обмотке якоря, в постоянную э.д.с. на щетках генератора, в двигательном — для изменения направления тока в проводниках обмотки якоря, чтобы якорь двигателя вращался в какую-либо определенную сторону. Коллектор состоит из втулки, коллекторных медных пластин, нажимного конуса. Коллекторные пластины изолированы друг от друга миканитовыми пластинами, от втулки и нажимного конуса — изоляционными манжетами. Рабочую часть коллектора, имеющую контакт со щетками, протачивают на станке и шлифуют. Чтобы при работе щетки не касались миканитовых пластин, коллектор подвергают «продорожке». При этом миканитовые пластины становятся ниже коллекторных примерно на 1 мм. Со стороны сердечника в коллекторных пластинах предусмотрены выступы с прорезью для впаивания проводников обмотки якоря. Коллекторные пластины имеют клинообразное сечение, а для удобства крепления — форму «ласточкин хвост». Коллектор насаживают на вал якоря прессовой посадкой и фиксируют шпонкой. Вал якоря имеет разные посадочные диаметры. Кроме якоря и коллектора, на вал напрессована стальная втулка вентилятора. Внутренние кольца подшипников и подшипниковые втулки насажены на вал в горячем состоянии.
Подшипниковые щиты
В щитах установлены шариковые или роликовые подшипники — надежные и не требующие большого ухода. Со стороны коллектора стоит упорный подшипник; его наружное кольцо упирается в прилив подшипникового щита. Со стороны тяговой передачи установлен свободный подшипник, который позволяет валу якоря удлиняться при нагреве. Для подшипников применяют густую консистентную смазку. Чтобы смазка при работе двигателей не выбрасывалась из смазочных камер, предусмотрено гидравлическое (лабиринтное) уплотнение. Вязкая смазка, попав в небольшой зазор между канавками-лабич рингами, проточенными в щите, и втулкой, насаженной на вал, под действием центробежной силы отбрасывается к стенкам лабиринта, где самой смазкой создаются гидравлические перегородки. Подшипниковые щиты крепят к обеим сторонам остова.
Щеточный аппарат
Для соединения коллектора двигателя с силовой цепью вагона используют электрографитные щетки марки ЭГ-2А, которые обладают хорошими коммутирующими свойствами, высокой механической прочностью и способны выдерживать большие перегрузки. Щетки представляют собой прямоугольные призмы размером 16 х 32 х 40 мм. Рабочую поверхность щеток пришлифовывают к коллектору для обеспечения надежного контакта. Щетки устанавливают в обоймы, называемые щеткодержателями, и соединяют с ними гибкими медными шунтами: в каждом щеткодержателе по две щетки, число щеткодержателей — четыре. Нажим на щетку осуществляется пружиной, упирающейся одним концом через палец в щетку, другим — в щеткодержатель. Нажатие на щетку должно быть отрегулировано в строго определенных пределах, так как чрезмерный нажим вызывает быстрый износ щетки и нагрев коллектора, а недостаточный не обеспечивает надежного контакта между щеткой и коллектором, вследствие чего возникает искрение под щеткой. Нажатие не должно превышать 25Н (2,5 кгс) и быть менее 15Н (1,5 кгс). Щеткодержатель укрепляют на кронштейне и с помощью двух шпилек, запрессованных в кронштейн, крепят непосредственно к подшипниковому щиту. Кронштейн от щеткодержателя и подшипникового шита изолируют фарфоровыми изоляторами. Для осмотра коллектора и щеткодержателей в остове двигателя имеются люки с крышками, обеспечивающими достаточную защиту от проникновения воды и грязи.
Вентилятор
В процессе работы необходимо охлаждать двигатель, так как с повышением температуры его обмоток снижается мощность двигателя. Вентилятор состоит из стальной втулки и силуминовой крыльчатки, скрепленных восемью заклепками. Лопатки крыльчатки расположены радиально для выброса воздуха в одном направлении. Вентилятор вращается вместе с якорем двигателя, создавая в нем разрежение. Потоки воздуха засасываются внутрь двигателя через отверстия со стороны коллектора. Часть воздушного потока омывает якорь, главные и добавочные полюса, другая проходит внутри коллектора и якоря по вентиляционным каналам. Воздух выталкивается наружу со стороны вентилятора через люк остова.
Устройство асинхронного двигателя с короткозамкнутым ротором
Асинхронный двигатель состоит из двух основных узлов: статора и ротора. На статоре размещают трехфазную обмотку, создающую вращающееся магнитное поле. Скорость вращения магнитного поля определяется частотой питающего двигатель тока и числом пар полюсов.
Обмотку ротора выполняют в виде так называемой «беличьей клетки». Она является короткозамкнутой и не имеет выводов. Беличья клетка состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора, набранного из листов электротехнической стали, без какой-либо изоляции. По торцам ротора устанавливают лопасти, образующие центробежный вентилятор. Ток в роторе наводится движущимся относительно него полем статора. Таким образом, для работы двигателя необходима разность скоростей вращения ротора и поля статора, что и отражено в его названии.
В таблице приведены технические характеристики коллекторных тяговых двигателей вагонов метрополитена:
| Тип двигателя | ДПМ-151 | ДК-102А…Г | SL-104n | USL-421 | ДК-104А | ДК-104Г, Д | ДК-108А | ДК-108А1 | ДК-108Г | ДК-108Д | ДК-112А | ДК-115Г | ДК-116А | ДК-117А | ДК-117ДМ | ДК-120АМ |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Тип вагонов | А | Г | В2 | В3 | В1 | Д | Е | Е | Еж | И | Еж3 | 81-717/714 | 81-717.5/714.5 | 81-720/721 | ||
| Год начала производства | 1935 | 1940 | 1930 | 1930 | 1948 | 1949 | 1959 | 1959 | 1970 | 1973 | 1973 | 1975 | 1987 | 1991 | ||
| Часовая мощность, кВт | 153 | 83 | 100 | 70 | 80 | 73 | 64 | 68 | 66 | 66 | 68 | 90 | 72 | 110 | 112-114 | 115 |
| Номинальное напряжение, В | 750 | 375 | 750 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | 375 | ||
| Рабочее ослабление поля, % | 65 | 44,5 | 40 | 40 | 35 | 28 | ||||||||||
| Часовой ток, А | 225 | 248 | 220 | 220 | 195 | 210 | 202 | 205 | 210 | 270 | 218 | 330 | 330-340 | 345 | ||
| Часовая частота вращения, об/мин | 950 / 968 | 1160 | 1300 | 1355 | 1530 | 1450 | 1510 | 1600 | 1600 | 1600 | 1360 | 1480 | 1480 | 1500 | ||
| Длительный ток, А | 173 | 205 | 185 | 175 | 182 | 178 | 178 | 185 | 230 | 185 | 295 | 290 | 295 | |||
| Длительная частота вращения, об/мин | 1075 | 1320 | 1455 | 1580 | 1600 | 1740 | 1220 | |||||||||
| Наибольший ток, А | 450 | 500 | 440 | 420 | 420 | 440 | ||||||||||
| Масса, кг | 2340 | 1490 | 700 | 615 | 630 | 630 | 625 | 625 | 765 | 760 | 770 | |||||
| Число пар полюсов | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | |||
| Число коллекторных пластин | 185 | 238 | 141 | 175 | 175 | 175 | 175 | 175 | 175 | 210 | 210 | |||||
| Возбуждение | Посл. | Посл. | Посл. | Посл. с подм. | Посл. с подм. | Посл. | Посл. с подм. | Посл. | Посл. | Посл. | ||||||
| Число витков обмотки ГП | 38 | 16+16 | 33 | 30С+530Ш | 30С | 30 | 40 | 40 | 32 | 26 | 26 | |||||
| Сопротвиление обмотки якоря, Ом | 0,066 | 0,041 | 0,068 | 0,086 | 0,078 | 0,092 | 0,092 | 0,092 | 0,066 | 0,034 | 0,0285 | |||||
| Сопротивление обмотки возбуждения, Ом | 0,0615 | 0,0269 | 0,064 | 0,062+165 | 0,067+? | 0,067 | 0,108 | 0,098 | 0,044 | 0,048 | 0,0312 | |||||
| Сопротивление добавочных полюсов, Ом | 0,0338 | 0,0215 | 0,028 | 0,035 | 0,034 | 0,037 | 0,049 | 0,049 | 0,022 | 0,015 | 0,0103 | |||||
| Воздушный зазр под центром/краем полюса, мм | 5 / 9 | 2,2 / 5 | 1,5 / 5,7 | 3,25 / 9 | 2,9 | 2,5 | 4 / 9 |
Конструкция используемых в настоящее время коллекторных тяговых двигателей ДК-117 и ДК-120 регламентируется техническими условиями ТУ 3355-029-05758196-02.
Характеристики коллекторных электродвигателей, применяемых на наземном городском транспорте:
- Э. М. Добровольская «Электропоезда метрополитена»
Тяговые двигатели тепловозов
14 марта 2016 г.,
Опубликовано в статьях: EE Publishers, Статьи: Energize, Статьи: Vector, Рекомендуемые: Energize
Майка Рикрофта, редактора функций, EE Publishers
Железнодорожный транспорт снова становится популярным для перевозки грузов на большие расстояния.В этой статье рассматривается роль электродвигателей в этом секторе транспортной отрасли.
Используются два типа локомотивов: чисто электрический, который питается от контактного провода среднего напряжения и ограничен в использовании для поездок на большие расстояния, и локомотив с приводом от дизельного двигателя, который может использоваться для всех типов операций. в том числе маневровые. В этой статье рассказывается о тепловозе.
Название «тепловоз» вводит в заблуждение, поскольку тяговое усилие обеспечивается электродвигателями, приводящими в движение колеса напрямую, а электричество для питания двигателей вырабатывается генератором переменного тока, приводимым в действие дизельным двигателем.Использование дизельного двигателя освобождает локомотив от подключения к внешнему источнику электроэнергии, а использование электродвигателей и приводов позволяет контролировать тяговые возможности локомотива, что было бы невозможно при прямом приводе от дизельного двигателя.
Электродвигатели тяговые
Двигатели могут быть установлены в нескольких различных конфигурациях:
- Управление тележкой или тележкой : Один двигатель приводит в движение все колеса тележки или тележки, обычно четыре колеса на мотор.
- Управление осью : Двигатель приводит в движение оба колеса на одной оси. Это наиболее распространенная конфигурация (см. Рис. 1).
- Управление колесом : Каждое колесо приводится в движение собственным двигателем. Это позволяет максимально контролировать локомотив, но используется нечасто.
В локомотивах используются три типа двигателей:
- Двигатели постоянного тока.
- Двигатели переменного тока с частотно-регулируемыми приводами.
- Двигатели переменного тока с постоянными магнитами.
Основные требования к двигателю локомотива заключаются в том, что он должен иметь возможность изменять и контролировать скорость, а также обеспечивать пусковой и ускоряющий момент. Ранние локомотивы использовали двигатели постоянного тока, поскольку они были единственным типом больших двигателей, которые могли обеспечивать управление скоростью и требуемый крутящий момент. Двигатели переменного тока работали с фиксированной скоростью и поэтому не могли использоваться в этом приложении. Двигатели постоянного тока имеют несколько недостатков, о которых будет сказано ниже.
Развитие частотно-регулируемых приводов для больших синхронных двигателей переменного тока изменило ситуацию, и сегодня большинство локомотивов используют этот тип двигателя и комбинации привода.На рынке появились двигатели с большими постоянными магнитами (PM), которые имеют ряд преимуществ перед синхронными двигателями переменного тока с обмоткой статора для тяговых приложений. Ряд производителей используют двигатели с постоянными магнитами в своих локомотивах.
Двигатели тяговые постоянного тока
Двигатели постоянного тока
используются в конфигурации с последовательной обмоткой, а скорость регулируется переключением последовательного сопротивления в цепи и вне ее. В ранних приложениях сопротивление регулировалось драйвером вручную, но позже были установлены релейные системы, которые делали это автоматически.При запуске через двигатель протекает максимальный ток, обеспечивая максимальный крутящий момент. По мере увеличения скорости двигателя противо-ЭДС снижает ток и крутящий момент, а последовательное сопротивление постепенно отключается, чтобы поддерживать требуемый крутящий момент, пока не будет достигнута полная скорость. Переключение сопротивления дает ступенчатое изменение крутящего момента и, следовательно, ускорения. Релейные системы были заменены электронным управлением в более поздних системах, чтобы обеспечить более плавные характеристики ускорения и замедления. В используемых сегодня системах обычно используются двигатели постоянного тока с раздельным возбуждением и тиристорные регуляторы как для возбуждения поля, так и для основного напряжения питания.Двигатели постоянного тока по-прежнему используются в приложениях, требующих постоянного запуска-останова при большой нагрузке.
Рис. 1: Мотор на оси (Railelectrica [5]). Двигатели постоянного тока серии
имеют недостаток, заключающийся в том, что при проскальзывании колес в стандартном приводе постоянного тока тяговый двигатель имеет тенденцию ускоряться и убегать, даже до точки механического отказа, если мощность не снижается. быстро. По мере увеличения проскальзывания колес коэффициент трения ( µ ) также быстро падает до уровня 0,10 или меньше, и, поскольку все двигатели соединены вместе, нагрузка на весь локомотив должна быть уменьшена.Таким образом, максимальная адгезия достигается при работе на уровне с комфортным запасом прочности ниже теоретического максимума. Более современные системы постоянного тока включают контроль проскальзывания колес, который определяет начало скольжения и автоматически модулирует мощность для сохранения контроля. Это позволяет локомотиву безопасно работать в точке, близкой к теоретическому максимуму [4].
Двигатели с частотно-регулируемым приводом переменного тока: асинхронные двигатели
Замена двигателей постоянного тока на двигатели переменного тока стала возможной благодаря развитию мощных электронных устройств, используемых в частотно-регулируемых приводах (ЧРП).ЧРП позволяют регулировать скорость и крутящий момент в большей степени, чем двигатели постоянного тока, и позволяют реализовать больше функций управления. Тяговые двигатели переменного тока заменили двигатели постоянного тока во многих тяговых приложениях. Используемые двигатели представляют собой асинхронные или асинхронные двигатели, которые имеют характеристики, подходящие для тяги. Скорость и крутящий момент двигателя регулируются путем изменения частоты, напряжения и тока, подаваемых на катушки статора. Двигатели для типичного локомотива будут иметь мощность от 400 до 600 кВт.
Синхронный двигатель с постоянными магнитами (PMSM)
PMSM — это трехфазный синхронный двигатель переменного тока с обычной короткозамкнутой клеткой или индукционной конструкцией, замененной магнитами, закрепленными в роторе. Ротор приводится в движение вращающимся магнитным полем, реализуемым посредством трехфазного переменного тока, подаваемого на обмотку статора. Ротор будет вращаться синхронно с вращающимся полем, создаваемым статором. Для двигателя требуется сложная система управления, но он может быть на 25% меньше, чем обычный трехфазный двигатель при той же номинальной мощности.Конструкция также обеспечивает более низкие рабочие температуры, поэтому охлаждение ротора не требуется, а статор представляет собой герметичный блок со встроенным жидкостным охлаждением. Ряд различных типов поездов был оборудован двигателями с постоянными магнитами. Уменьшенный размер особенно привлекателен для автомобилей с низким полом, где ступичные двигатели могут быть эффективным способом обеспечения тяги в компактной тележке. Разработка двигателя и связанных с ним систем управления продолжается, и несомненно, что двигатель с постоянными магнитами будет использоваться на большем количестве железных дорог в будущем [3].Системы управления способны управлять как крутящим моментом, так и скоростью двигателя, что обеспечивает широкий диапазон работы, подходящий для тяги.
Двигатель с постоянными магнитами обеспечивает более высокий пусковой момент, чем асинхронные или асинхронные двигатели переменного тока, используемые в локомотивах, что дает возможность управлять осью напрямую, в отличие от зубчатой передачи, используемой с другими двигателями. Это снижает вес и увеличивает эффективность. PMSM использует специально разработанный инвертор / контроллер, чтобы воспользоваться преимуществами характеристик двигателя.
Установка тягового двигателя непосредственно на колесо была целью с тех пор, как электродвигатели впервые использовались в локомотивах. Вероятно, в будущем это станет возможным благодаря модулям PMSM с высоким удельным крутящим моментом. Опытные образцы созданы успешно. Конструкции с осевым потоком были созданы для промышленности, и, возможно, эту конфигурацию можно будет использовать на локомотивах.
Генераторы
Генераторы переменного тока используются в локомотивах с приводом от постоянного и переменного тока для выработки необходимой электроэнергии.Типичный генератор переменного тока будет бесщеточным трехфазным синхронным типом. Генератор приводится в действие непосредственно дизельным двигателем и, таким образом, работает в диапазоне скоростей и, как следствие, переменной выходной частоты. Возможно, это основная причина использования комбинаций выпрямитель / инвертор. Нет причин, по которым генератор переменного тока должен работать на фиксированной частоте, поскольку он не управляет напрямую устройствами, зависящими от частоты. Рабочий диапазон частот также может быть выбран в соответствии с процессом выпрямления, при этом типичная выходная мощность составляет 3 фазы 75 Гц при работе на полных оборотах двигателя.Во многих генераторах переменного тока выпрямительный узел прикреплен к раме генератора и поставляется в виде блока, согласованного с выходом генератора. Это позволяет использовать генератор переменного тока и для тяги постоянного тока.
Выпрямительные преобразователи
Для всех типов тяговых двигателей требуется питание постоянного тока, либо напрямую в случае двигателя постоянного тока, либо косвенно через частотно-регулируемый привод в случае двигателя переменного тока. Во многих современных двигателях выпрямительный блок поставляется как часть генератора переменного тока и соответствует характеристикам машины.
Органы управления локомотивом
Ранние средства управления основывались только на скорости. Современные разработки учитывают множество других факторов, чтобы максимизировать тяговую мощность локомотивов при том же размере приводного двигателя. Одним из основных факторов, влияющих на тяговую мощность, является проскальзывание или проскальзывание колес, и большинство современных систем управления предназначены для управления величиной проскальзывания между колесом и рельсом.
Адгезия и скольжение в локомотивах
Локомотив приводится в движение за счет контакта колеса с рельсом.Это контакт металл-металл, и передаваемая сила зависит от коэффициента сцепления и веса сцепления локомотива. Коэффициент сцепления означает величину веса локомотива на его ведущих колесах, которая может быть преобразована в тяговое усилие.
Пробуксовка колес происходит, когда тяговое усилие превышает адгезионную массу. Адгезионный вес определяется как сила, которую может приложить колесо без проскальзывания или скольжения. Скольжение возникает, когда окружная скорость превышает линейную скорость колеса на рельсе.
Вес клея т = мкм адгезия x вес (1)
Коэффициент сцепления зависит от скорости скольжения, состояния поверхности рельса, скорости поезда и температуры в зоне контакта. Из всех параметров, которые могут влиять на коэффициент сцепления, можно изменять и контролировать только скорость поезда и скорость скольжения. Поскольку скорость поезда обычно поддерживается на требуемом уровне, можно управлять только скоростью скольжения [1].Характеристики колес немного различаются, и соединенные ведущие колеса будут иметь некоторое пробуксовку.
Рис. 2: Коэффициент адгезии зависит от скорости скольжения [1].
Даже при работе в оптимальных условиях между колесами и рельсами будет определенный процент пробуксовки. Целью современной системы управления является максимальное увеличение коэффициента сцепления за счет ограничения или контроля степени проскальзывания колес. Это достигается за счет управления двигателями многоосного грузовика или агрегата.Тяговое усилие изменяется в зависимости от скольжения, как показано на рис. 2, и цель системы управления — управлять локомотивом в зоне максимального коэффициента сцепления. Существует разница в коэффициентах сцепления, достигаемая с двигателями переменного и постоянного тока. Приводы переменного тока обеспечивают более высокие пусковые коэффициенты сцепления, а также более высокую управляемую адгезию.
Существует ряд различных систем, используемых для управления скольжением и оптимизации коэффициента сцепления. Все используют какие-то средства сравнения скорости вращения колеса с линейной скоростью поезда и подают соответствующие средства управления на инвертор.Проскальзывание измеряется путем определения скорости локомотива с помощью доплеровского радара (вместо использования вращающихся колес) и сравнения ее с током двигателя, чтобы увидеть, соответствует ли вращение колеса скорости движения относительно земли. Если между ними существует несоответствие, ток двигателя регулируется, чтобы поддерживать скольжение в пределах диапазона «медленного» хода и поддерживать тяговое усилие на максимально возможном уровне в условиях медленного передвижения [3].
Еще один элемент управления, обеспечивающий улучшенное сцепление, — это компенсация переноса веса.Когда локомотив тянет груз, вес имеет тенденцию переноситься с передней оси на заднюю ось каждого грузовика. При максимальном тяговом усилии вес ведущей оси может быть уменьшен примерно на 20%. Поскольку тяговое усилие пропорционально весу водителей, тяговое усилие будет определяться самой легкой осью в системе, в которой двигатели получают питание от общего источника. Таким образом, эквивалентная масса локомотива снижается примерно на 20%. Однако с системой управления осью привод может компенсировать перенос веса.Когда ведущая ось гаснет, система привода снижает мощность на эту ось и передает больше мощности на заднюю ось, не вызывая пробуксовки колес.
Инверторы и системы управления
Инвертор, который на самом деле является моторным приводом или частотно-регулируемым приводом, подает на двигатели переменный ток различной частоты и тока. Первоначально один инвертор поставлял все двигатели, но в соответствии с новейшими технологиями, как правило, используется один инвертор на двигатель. Это дает преимущество уменьшения размера инвертора и возможности индивидуального управления двигателем.Большинство больших локомотивов используют конфигурацию с одним двигателем на ось, поэтому каждый преобразователь управляет осью и колесной парой.
Есть несколько вариантов конфигурации инверторов. Некоторые производители полагаются на один инвертор на грузовик, в то время как другие используют один инвертор на ось. Обе системы имеют свои достоинства. Система управления грузовиком соединяет оси внутри каждого грузовика параллельно, обеспечивая максимальное равное управление проскальзыванием колес между осями. Параллельное управление также означает более равномерный износ колес между осями.Однако, если один инвертор (например, один грузовик) выходит из строя, то агрегат может создавать только 50% своего тягового усилия. Один инвертор на ось сложнее, но есть мнение, что индивидуальное управление осью может обеспечить наилучшее тяговое усилие. Если инвертор выходит из строя, тяговое усилие для этой оси теряется, но полное тяговое усилие по-прежнему доступно через другие пять инверторов (для шестиосного агрегата). За счет индивидуального управления каждой осью отпадает необходимость в точном согласовании диаметров колес для оптимальной производительности [4].
Динамическое торможение
В системах динамического торможения двигатели работают как генераторы, а генерируемый ток подается на реостаты или переменные резисторы, установленные на шасси локомотива. Сила торможения регулируется изменением сопротивления реостата. Мощность, необходимая для торможения или замедления локомотива, такая же, как и для его ускорения, поэтому реостаты должны рассеивать большое количество энергии и, как правило, имеют принудительное воздушное охлаждение.В более поздних разработках генерируемый ток использовался для зарядки аккумуляторных батарей или ультраконденсаторов, а накопленная энергия использовалась для помощи в повторном ускорении локомотива.
Возможности модернизации
Локомотивы
— это долгосрочная инвестиция, и в Африке есть много единиц, возраст которых превышает 20 лет, с использованием более старых технологий и средств управления. К счастью, можно модернизировать системы управления на старых локомотивах для повышения производительности и продления срока службы локомотива без замены основных компонентов привода.Было заявлено улучшение тягового усилия до 25%, а при всепогодной или управляемой адгезии — до 26%. Это может уменьшить количество единиц, необходимых для перевозки высоких грузов.
Накопители энергии или суперконденсаторы для ускорения запуска
Супер- и ультраконденсаторы используются в некоторых локомотивах для обеспечения дополнительной мощности, необходимой при запуске. Это позволяет использовать двигатели и генераторы меньшего размера. Конденсаторы могут накапливать энергию рекуперативного торможения, которая в противном случае рассеивалась бы в резисторах или других устройствах.
Самый южноафриканский локомотив
Локомотивы серии GE Evolution, производимые в Южной Африке, представляют собой шестиосные локомотивы (две группы по три спереди и сзади, все оси приводятся в движение), использующие технологию регулирования тягового усилия отдельных осей переменного тока, которая обеспечивает большую тяговую мощность за счет снижения проскальзывания на запуски, подъемы и в неоптимальных дорожных условиях. Эта технология обеспечивает оптимальную производительность, меньшие потери энергии и существенно снижает расходы на техническое обслуживание и связанные с ним простои в течение срока службы локомотива по сравнению с более старыми тяговыми системами постоянного и переменного тока.Локомотив оснащен сложными средствами управления оператора, которые улучшают диагностику и упрощают работу. Консолидированная архитектура управления локомотивом серии Evolution упрощает обновление программного обеспечения и загрузку данных. «Умные» дисплеи устраняют несколько дополнительных черных ящиков в пользу комбинации компьютера и дисплея, что повышает как надежность, так и эргономичность для оператора.
Список литературы
[1] P Pichlík и J Zděnek: «Обзор методов контроля пробуксовки, используемых в локомотивах», Труды по электротехнике , Vol.3 (2014), № 2, www.transoneleng.org/2014/20142c.pdf
[2] RTWP: «Электронное питание для поездов», www.railway-technical.com / tract-02.shtml
[3] RTWP: «Технология тепловозов», www.railway-technical.com / diesel.shtml
[4] Республиканский локомотив: «Тяга переменного тока против тяги постоянного тока», www.republiclocomotive.com/ac_traction_vs_dc_traction.html
[5] Railelectrica : «Выбор подвески тяговых двигателей», www.railelectrica.com/traction-motor/selection-of-suspension-arrangement-of-traction-motors-a-right-approach-2/
Присылайте свои комментарии по адресу: vector @ ee.co.za
Статьи по теме
Тяговый двигатель — Простая английская Википедия, бесплатная энциклопедия
- См. Также: Электромобиль и Электродвигатель
Тяговый двигатель относится к типу электродвигателя.Тяговый двигатель используется для создания крутящего момента на машине. Обычно оно превращается в прямолинейное движение.
Тяговые двигатели используются в рельсовых транспортных средствах с электроприводом, таких как электровозы и электровозы. Они также используются в электромобилях, таких как электрические поплавки для молока, лифты и конвейеры. Транспортные средства с системами электропередачи, такие как дизель-электрические локомотивы, гибридные электромобили и электромобили с питанием от аккумуляторов.
Железная дорога [изменить | изменить источник]
Железные дороги впервые применили двигатели постоянного тока.Эти двигатели обычно работали примерно от 600 вольт. Полупроводники большой мощности были разработаны для управления переключением двигателей переменного тока. Они сделали асинхронные двигатели переменного тока лучшим выбором. [1] Асинхронный двигатель не требует контактов внутри двигателя. Эти двигатели переменного тока проще и надежнее старых двигателей постоянного тока. Асинхронные двигатели переменного тока, известные как асинхронные тяговые двигатели .
До середины 20 века один большой двигатель часто использовался для привода нескольких колес через шатуны.Точно так же паровозы вращали ведущие колеса. В настоящее время обычной практикой является использование одного тягового двигателя для привода каждой оси через зубчатую передачу.
Обычно тяговый двигатель устанавливается между колесной рамой и ведомой осью. Это называется «тяговый двигатель с носовой подвеской». Проблема с этим креплением заключается в том, что часть веса двигателя приходится на ось. Это приводит к более быстрому износу гусеницы и рамы. [1] «Биполярные» электровозы, построенные компанией General Electric для Милуоки-роуд, имели двигатели с прямым приводом.Вращающийся вал двигателя был также осью для колес.
Двигатель постоянного тока состоит из двух частей; вращающийся якорь и фиксированная обмотка возбуждения . Обмотки возбуждения, также называемые статором , окружают якорь. Обмотки возбуждения выполнены из плотно намотанных катушек провода внутри корпуса двигателя. Якорь, также называемый ротором , представляет собой еще один набор катушек с проволокой, намотанных вокруг центрального вала. Якорь подключен к обмоткам возбуждения через щетки .Щетки представляют собой подпружиненные контакты, прижимающиеся к коммутатору . Коммутатор посылает электричество по круговой схеме на обмотки якоря. Двигатель с последовательной обмоткой имеет якорь и обмотки возбуждения, соединенные последовательно. Двигатель постоянного тока с последовательной обмоткой имеет низкое электрическое сопротивление. Когда на двигатель подается напряжение, внутри двигателя создается сильное магнитное поле. [1] Создает высокий крутящий момент, поэтому подходит для запуска поезда.Если на двигатель будет подаваться больше тока, чем необходимо, будет слишком большой крутящий момент, и колеса начнут вращаться. Если на двигатель будет подан слишком большой ток, это может привести к его повреждению. Резисторы используются для ограничения тока при запуске двигателя.
Когда двигатель постоянного тока начинает вращаться, магнитные поля внутри начинают объединяться. Они создают внутреннее напряжение. Эта электромагнитная сила (ЭДС) работает против напряжения, подаваемого на двигатель. ЭДС управляет током, протекающим в двигателе. По мере увеличения скорости двигателя ЭДС падает.В двигатель протекает меньше тока, и он создает меньший крутящий момент. Двигатель перестанет увеличивать свою скорость, когда крутящий момент совпадает (совпадает с) сопротивлением поезда. Для ускорения поезда на двигатель должно подаваться большее напряжение. Один или несколько резисторов удаляются для увеличения напряжения. Это увеличит ток. Крутящий момент увеличится, как и скорость поезда. Когда в цепи не осталось резисторов, полное линейное напряжение подается непосредственно на двигатель.
В электропоезде машинисту изначально приходилось контролировать скорость, изменяя сопротивление вручную.К 1914 году использовалось автоматическое ускорение. Это было достигнуто с помощью ускоряющего реле в цепи двигателя. Это часто называлось реле с надрезом . Реле будет следить за падением тока и контролировать сопротивление. Все, что нужно было сделать водителю, — это выбрать низкую, среднюю или полную скорость. Эти скорости называются шунтирующими , сериями и параллельными в зависимости от способа подключения двигателей.
Транспорт дорожный [изменить | изменить источник]
- См. Также: Гибридный электромобиль и электромобиль
Традиционно дорожные транспортные средства (легковые автомобили, автобусы и грузовики) использовали дизельные или бензиновые двигатели с трансмиссией.Во второй половине 20-го века начали разрабатывать автомобили с системами электрической трансмиссии. Эти автомобили имеют источник электричества от батарей или топливных элементов. Они также могут приводиться в действие двигателями внутреннего сгорания.
Преимущество использования электродвигателей заключается в том, что некоторые их типы могут генерировать энергию. Они действуют как динамо-машина при торможении. Это помогает повысить эффективность автомобиля.
Из-за высокой мощности тяговых двигателей они выделяют много тепла.Обычно они требуют охлаждения, часто с принудительной подачей воздуха. [2]
Тяговый двигатель — Простая английская Википедия, бесплатная энциклопедия
- См. Также: Электромобиль и Электродвигатель
Тяговый двигатель относится к типу электродвигателя. Тяговый двигатель используется для создания крутящего момента на машине. Обычно оно превращается в прямолинейное движение.
Тяговые двигатели используются в рельсовых транспортных средствах с электроприводом, таких как электровозы и электровозы.Они также используются в электромобилях, таких как электрические поплавки для молока, лифты и конвейеры. Транспортные средства с системами электропередачи, такие как дизель-электрические локомотивы, гибридные электромобили и электромобили с питанием от аккумуляторов.
Железная дорога [изменить | изменить источник]
Железные дороги впервые применили двигатели постоянного тока. Эти двигатели обычно работали примерно от 600 вольт. Полупроводники большой мощности были разработаны для управления переключением двигателей переменного тока. Они сделали асинхронные двигатели переменного тока лучшим выбором. [1] Асинхронный двигатель не требует контактов внутри двигателя. Эти двигатели переменного тока проще и надежнее старых двигателей постоянного тока. Асинхронные двигатели переменного тока, известные как асинхронные тяговые двигатели .
До середины 20 века один большой двигатель часто использовался для привода нескольких колес через шатуны. Точно так же паровозы вращали ведущие колеса. В настоящее время обычной практикой является использование одного тягового двигателя для привода каждой оси через зубчатую передачу.
Обычно тяговый двигатель устанавливается между колесной рамой и ведомой осью. Это называется «тяговый двигатель с носовой подвеской». Проблема с этим креплением заключается в том, что часть веса двигателя приходится на ось. Это приводит к более быстрому износу гусеницы и рамы. [1] «Биполярные» электровозы, построенные компанией General Electric для Милуоки-роуд, имели двигатели с прямым приводом. Вращающийся вал двигателя был также осью для колес.
Двигатель постоянного тока состоит из двух частей; вращающийся якорь и фиксированная обмотка возбуждения .Обмотки возбуждения, также называемые статором , окружают якорь. Обмотки возбуждения выполнены из плотно намотанных катушек провода внутри корпуса двигателя. Якорь, также называемый ротором , представляет собой еще один набор катушек с проволокой, намотанных вокруг центрального вала. Якорь подключен к обмоткам возбуждения через щетки . Щетки представляют собой подпружиненные контакты, прижимающиеся к коммутатору . Коммутатор посылает электричество по круговой схеме на обмотки якоря.Двигатель с последовательной обмоткой имеет якорь и обмотки возбуждения, соединенные последовательно. Двигатель постоянного тока с последовательной обмоткой имеет низкое электрическое сопротивление. Когда на двигатель подается напряжение, внутри двигателя создается сильное магнитное поле. [1] Создает высокий крутящий момент, поэтому подходит для запуска поезда. Если на двигатель будет подаваться больше тока, чем необходимо, будет слишком большой крутящий момент, и колеса начнут вращаться. Если на двигатель будет подан слишком большой ток, это может привести к его повреждению.Резисторы используются для ограничения тока при запуске двигателя.
Когда двигатель постоянного тока начинает вращаться, магнитные поля внутри начинают объединяться. Они создают внутреннее напряжение. Эта электромагнитная сила (ЭДС) работает против напряжения, подаваемого на двигатель. ЭДС управляет током, протекающим в двигателе. По мере увеличения скорости двигателя ЭДС падает. В двигатель протекает меньше тока, и он создает меньший крутящий момент. Двигатель перестанет увеличивать свою скорость, когда крутящий момент совпадает (совпадает с) сопротивлением поезда.Для ускорения поезда на двигатель должно подаваться большее напряжение. Один или несколько резисторов удаляются для увеличения напряжения. Это увеличит ток. Крутящий момент увеличится, как и скорость поезда. Когда в цепи не осталось резисторов, полное линейное напряжение подается непосредственно на двигатель.
В электропоезде машинисту изначально приходилось контролировать скорость, изменяя сопротивление вручную. К 1914 году использовалось автоматическое ускорение. Это было достигнуто с помощью ускоряющего реле в цепи двигателя.Это часто называлось реле с надрезом . Реле будет следить за падением тока и контролировать сопротивление. Все, что нужно было сделать водителю, — это выбрать низкую, среднюю или полную скорость. Эти скорости называются шунтирующими , сериями и параллельными в зависимости от способа подключения двигателей.
Транспорт дорожный [изменить | изменить источник]
- См. Также: Гибридный электромобиль и электромобиль
Традиционно дорожные транспортные средства (легковые автомобили, автобусы и грузовики) использовали дизельные или бензиновые двигатели с трансмиссией.Во второй половине 20-го века начали разрабатывать автомобили с системами электрической трансмиссии. Эти автомобили имеют источник электричества от батарей или топливных элементов. Они также могут приводиться в действие двигателями внутреннего сгорания.
Преимущество использования электродвигателей заключается в том, что некоторые их типы могут генерировать энергию. Они действуют как динамо-машина при торможении. Это помогает повысить эффективность автомобиля.
Из-за высокой мощности тяговых двигателей они выделяют много тепла.Обычно они требуют охлаждения, часто с принудительной подачей воздуха. [2]
Тяговый двигатель — Простая английская Википедия, бесплатная энциклопедия
- См. Также: Электромобиль и Электродвигатель
Тяговый двигатель относится к типу электродвигателя. Тяговый двигатель используется для создания крутящего момента на машине. Обычно оно превращается в прямолинейное движение.
Тяговые двигатели используются в рельсовых транспортных средствах с электроприводом, таких как электровозы и электровозы.Они также используются в электромобилях, таких как электрические поплавки для молока, лифты и конвейеры. Транспортные средства с системами электропередачи, такие как дизель-электрические локомотивы, гибридные электромобили и электромобили с питанием от аккумуляторов.
Железная дорога [изменить | изменить источник]
Железные дороги впервые применили двигатели постоянного тока. Эти двигатели обычно работали примерно от 600 вольт. Полупроводники большой мощности были разработаны для управления переключением двигателей переменного тока. Они сделали асинхронные двигатели переменного тока лучшим выбором. [1] Асинхронный двигатель не требует контактов внутри двигателя. Эти двигатели переменного тока проще и надежнее старых двигателей постоянного тока. Асинхронные двигатели переменного тока, известные как асинхронные тяговые двигатели .
До середины 20 века один большой двигатель часто использовался для привода нескольких колес через шатуны. Точно так же паровозы вращали ведущие колеса. В настоящее время обычной практикой является использование одного тягового двигателя для привода каждой оси через зубчатую передачу.
Обычно тяговый двигатель устанавливается между колесной рамой и ведомой осью. Это называется «тяговый двигатель с носовой подвеской». Проблема с этим креплением заключается в том, что часть веса двигателя приходится на ось. Это приводит к более быстрому износу гусеницы и рамы. [1] «Биполярные» электровозы, построенные компанией General Electric для Милуоки-роуд, имели двигатели с прямым приводом. Вращающийся вал двигателя был также осью для колес.
Двигатель постоянного тока состоит из двух частей; вращающийся якорь и фиксированная обмотка возбуждения .Обмотки возбуждения, также называемые статором , окружают якорь. Обмотки возбуждения выполнены из плотно намотанных катушек провода внутри корпуса двигателя. Якорь, также называемый ротором , представляет собой еще один набор катушек с проволокой, намотанных вокруг центрального вала. Якорь подключен к обмоткам возбуждения через щетки . Щетки представляют собой подпружиненные контакты, прижимающиеся к коммутатору . Коммутатор посылает электричество по круговой схеме на обмотки якоря.Двигатель с последовательной обмоткой имеет якорь и обмотки возбуждения, соединенные последовательно. Двигатель постоянного тока с последовательной обмоткой имеет низкое электрическое сопротивление. Когда на двигатель подается напряжение, внутри двигателя создается сильное магнитное поле. [1] Создает высокий крутящий момент, поэтому подходит для запуска поезда. Если на двигатель будет подаваться больше тока, чем необходимо, будет слишком большой крутящий момент, и колеса начнут вращаться. Если на двигатель будет подан слишком большой ток, это может привести к его повреждению.Резисторы используются для ограничения тока при запуске двигателя.
Когда двигатель постоянного тока начинает вращаться, магнитные поля внутри начинают объединяться. Они создают внутреннее напряжение. Эта электромагнитная сила (ЭДС) работает против напряжения, подаваемого на двигатель. ЭДС управляет током, протекающим в двигателе. По мере увеличения скорости двигателя ЭДС падает. В двигатель протекает меньше тока, и он создает меньший крутящий момент. Двигатель перестанет увеличивать свою скорость, когда крутящий момент совпадает (совпадает с) сопротивлением поезда.Для ускорения поезда на двигатель должно подаваться большее напряжение. Один или несколько резисторов удаляются для увеличения напряжения. Это увеличит ток. Крутящий момент увеличится, как и скорость поезда. Когда в цепи не осталось резисторов, полное линейное напряжение подается непосредственно на двигатель.
В электропоезде машинисту изначально приходилось контролировать скорость, изменяя сопротивление вручную. К 1914 году использовалось автоматическое ускорение. Это было достигнуто с помощью ускоряющего реле в цепи двигателя.Это часто называлось реле с надрезом . Реле будет следить за падением тока и контролировать сопротивление. Все, что нужно было сделать водителю, — это выбрать низкую, среднюю или полную скорость. Эти скорости называются шунтирующими , сериями и параллельными в зависимости от способа подключения двигателей.
Транспорт дорожный [изменить | изменить источник]
- См. Также: Гибридный электромобиль и электромобиль
Традиционно дорожные транспортные средства (легковые автомобили, автобусы и грузовики) использовали дизельные или бензиновые двигатели с трансмиссией.Во второй половине 20-го века начали разрабатывать автомобили с системами электрической трансмиссии. Эти автомобили имеют источник электричества от батарей или топливных элементов. Они также могут приводиться в действие двигателями внутреннего сгорания.
Преимущество использования электродвигателей заключается в том, что некоторые их типы могут генерировать энергию. Они действуют как динамо-машина при торможении. Это помогает повысить эффективность автомобиля.
Из-за высокой мощности тяговых двигателей они выделяют много тепла.Обычно они требуют охлаждения, часто с принудительной подачей воздуха. [2]
Тяговый двигатель — Простая английская Википедия, бесплатная энциклопедия
- См. Также: Электромобиль и Электродвигатель
Тяговый двигатель относится к типу электродвигателя. Тяговый двигатель используется для создания крутящего момента на машине. Обычно оно превращается в прямолинейное движение.
Тяговые двигатели используются в рельсовых транспортных средствах с электроприводом, таких как электровозы и электровозы.Они также используются в электромобилях, таких как электрические поплавки для молока, лифты и конвейеры. Транспортные средства с системами электропередачи, такие как дизель-электрические локомотивы, гибридные электромобили и электромобили с питанием от аккумуляторов.
Железная дорога [изменить | изменить источник]
Железные дороги впервые применили двигатели постоянного тока. Эти двигатели обычно работали примерно от 600 вольт. Полупроводники большой мощности были разработаны для управления переключением двигателей переменного тока. Они сделали асинхронные двигатели переменного тока лучшим выбором. [1] Асинхронный двигатель не требует контактов внутри двигателя. Эти двигатели переменного тока проще и надежнее старых двигателей постоянного тока. Асинхронные двигатели переменного тока, известные как асинхронные тяговые двигатели .
До середины 20 века один большой двигатель часто использовался для привода нескольких колес через шатуны. Точно так же паровозы вращали ведущие колеса. В настоящее время обычной практикой является использование одного тягового двигателя для привода каждой оси через зубчатую передачу.
Обычно тяговый двигатель устанавливается между колесной рамой и ведомой осью. Это называется «тяговый двигатель с носовой подвеской». Проблема с этим креплением заключается в том, что часть веса двигателя приходится на ось. Это приводит к более быстрому износу гусеницы и рамы. [1] «Биполярные» электровозы, построенные компанией General Electric для Милуоки-роуд, имели двигатели с прямым приводом. Вращающийся вал двигателя был также осью для колес.
Двигатель постоянного тока состоит из двух частей; вращающийся якорь и фиксированная обмотка возбуждения .Обмотки возбуждения, также называемые статором , окружают якорь. Обмотки возбуждения выполнены из плотно намотанных катушек провода внутри корпуса двигателя. Якорь, также называемый ротором , представляет собой еще один набор катушек с проволокой, намотанных вокруг центрального вала. Якорь подключен к обмоткам возбуждения через щетки . Щетки представляют собой подпружиненные контакты, прижимающиеся к коммутатору . Коммутатор посылает электричество по круговой схеме на обмотки якоря.Двигатель с последовательной обмоткой имеет якорь и обмотки возбуждения, соединенные последовательно. Двигатель постоянного тока с последовательной обмоткой имеет низкое электрическое сопротивление. Когда на двигатель подается напряжение, внутри двигателя создается сильное магнитное поле. [1] Создает высокий крутящий момент, поэтому подходит для запуска поезда. Если на двигатель будет подаваться больше тока, чем необходимо, будет слишком большой крутящий момент, и колеса начнут вращаться. Если на двигатель будет подан слишком большой ток, это может привести к его повреждению.Резисторы используются для ограничения тока при запуске двигателя.
Когда двигатель постоянного тока начинает вращаться, магнитные поля внутри начинают объединяться. Они создают внутреннее напряжение. Эта электромагнитная сила (ЭДС) работает против напряжения, подаваемого на двигатель. ЭДС управляет током, протекающим в двигателе. По мере увеличения скорости двигателя ЭДС падает. В двигатель протекает меньше тока, и он создает меньший крутящий момент. Двигатель перестанет увеличивать свою скорость, когда крутящий момент совпадает (совпадает с) сопротивлением поезда.Для ускорения поезда на двигатель должно подаваться большее напряжение. Один или несколько резисторов удаляются для увеличения напряжения. Это увеличит ток. Крутящий момент увеличится, как и скорость поезда. Когда в цепи не осталось резисторов, полное линейное напряжение подается непосредственно на двигатель.
В электропоезде машинисту изначально приходилось контролировать скорость, изменяя сопротивление вручную. К 1914 году использовалось автоматическое ускорение. Это было достигнуто с помощью ускоряющего реле в цепи двигателя.Это часто называлось реле с надрезом . Реле будет следить за падением тока и контролировать сопротивление. Все, что нужно было сделать водителю, — это выбрать низкую, среднюю или полную скорость. Эти скорости называются шунтирующими , сериями и параллельными в зависимости от способа подключения двигателей.
Транспорт дорожный [изменить | изменить источник]
- См. Также: Гибридный электромобиль и электромобиль
Традиционно дорожные транспортные средства (легковые автомобили, автобусы и грузовики) использовали дизельные или бензиновые двигатели с трансмиссией.Во второй половине 20-го века начали разрабатывать автомобили с системами электрической трансмиссии. Эти автомобили имеют источник электричества от батарей или топливных элементов. Они также могут приводиться в действие двигателями внутреннего сгорания.
Преимущество использования электродвигателей заключается в том, что некоторые их типы могут генерировать энергию. Они действуют как динамо-машина при торможении. Это помогает повысить эффективность автомобиля.
Из-за высокой мощности тяговых двигателей они выделяют много тепла.Обычно они требуют охлаждения, часто с принудительной подачей воздуха. [2]
Тяговые двигатели — обзор
6.2.1.2 Повышение коэрцитивной силы посредством процесса диффузии границы зерна
Рабочая температура тяговых двигателей для гибридных / электрических транспортных средств обычно составляет 150–200 ° C, и они требуют не менее 6 кЭ (0,6 Тл) от Н с . Однако из-за низкого T C Nd 2 Fe 14 B (315 ° C) спеченные магниты на основе Nd-Fe-B не могут использоваться, поскольку их H c быстро падает. с температурой.PM, пригодный для высокотемпературных применений, должен иметь высокий H c около 30 кЭ (3 Тл) при комнатной температуре. Чтобы компенсировать потерю H c , примерно одна треть атомов Nd замещена тяжелыми RE-элементами Dy или Tb в спеченных магнитах Nd-Fe-B с высокой коэрцитивной силой, чтобы использовать более высокие H a фазы (Nd, Dy / Tb) 2 Fe 14 B фазы. Однако замещение Dy / Tb значительно снижает намагниченность из-за антиферромагнитной связи между Dy / Tb и Fe, что приводит к уменьшению ( BH ) max .Кроме того, Dy — ограниченный природный ресурс и очень дорогой. Эти факторы создали потребность в магнитах H, , и без тяжелых РЗМ. Модификация микроструктуры магнитов Nd-Fe-B играет решающую роль в улучшении этих магнитов H c и M r [49]. В зависимости от размера зерна и содержания РЗЭ промышленные спеченные магниты без Dy демонстрируют H c ≈ 12–19 кЭ (960–1520 кА / м) при комнатной температуре.Park et al. [50] предложили процесс диффузии границ зерен тяжелых RE-металлов (GBDP) для улучшения H c спеченных магнитов путем проникновения соединений тяжелых RE-металлов, таких как Dy 2 O 3 , DyF 3 , Tb 3 O 4 и TbF 4 . Процесс GBDP включает покрытие поверхности магнитов слоем тяжелых соединений RE, например, путем влажного покрытия или испарения металла или смешивания с порошками перед уплотнением.Затем магниты нагреваются до температуры (~ 1000 ° C), при которой границы зерен, богатых неодимом, плавятся, облегчая тем самым диффузию тяжелых РЗЭ элементов в границы зерен. Во время этого процесса некоторые из тяжелых РЗЭ далее диффундируют во внешнюю оболочку зерен Nd 2 Fe 14 B, образуя эпитаксиальную оболочку, богатую Dy / Tb, где инициируются зарождение и распространение перемагничивания. Тяжелые RE-элементы во внешней оболочке обеспечивают увеличенные H, , и , что приводит к увеличению H c в магнитах.В результате требуется значительно уменьшенное количество Dy, что, в свою очередь, позволяет изготавливать магниты с высокой H c с минимальными потерями M s .
Эффекты GBDP зависят от нескольких факторов, включая распределение фазы, богатой RE в исходном магните, источник диффузии, массовое соотношение между диффундирующим соединением и магнитом, текстуру, термообработку, температуру и время и т. Д. GBDP увеличивает H c и уменьшает количество требуемых RE элементов по сравнению со смешиванием RE элементов с исходным магнитным сплавом.Накамура и др. [51] пропитали Dy и Tb в спеченных магнитах Nd-Fe-B путем покрытия мелкозернистыми порошками Dy 2 O 3 , DyF 3 или TbF 3 (1–5 мкм) посредством погружение в смеси порошка и этанола и термообработка при температуре до 900 ° C с последующим старением при температуре около 500 ° C. Они наблюдали значительное улучшение H c для Dy 2 O 3 , DyF 3 и TbF 3 с 11,3 кЭ (900 кА / м) до 16.3 кЭ (1300 кА / м), 18,8 кЭ (1500 кА / м) и 22,6 кЭ (1800 кА / м), соответственно, без заметного снижения M r . Более высокое усиление H c в магнитах с Tb, чем Dy, приписывается более высокому H a (Nd, Tb) 2 Fe 14 B по сравнению с (Nd, Dy) 2 Fe 14 B. Ishimaru et al. [52] диффузия обработала импульсную лазерную осажденную толстую пленку Nd-Fe-B с Tb-металлом и сообщила о заметном увеличении H c с 13.От 3 кЭ (1050 кА / м) до более 27,5 кЭ (2200 кА / м) без каких-либо значительных потерь в M r. Samardžija et al. [53] исследовали анизотропные спеченные магниты Nd 2 Fe 14 B, модифицированные Tb с использованием GBDP, путем покрытия магнита суспензией Tb 4 O 7 -этанола и последующей термообработки при 850 ° C в течение 10 часов и позже при 500 ° C в течение 1 ч. Они также показали с помощью микроскопических исследований, что сначала Tb диффундирует по границам зерен от поверхности к центру магнита, а затем вступает в реакцию с внешними частями зерен матрицы Nd 2 Fe 14 B, образуя богатую Tb и (Nd, Tb) 2 Fe 14 B структура ядро-оболочка.Магниты GBDP показали увеличение H c на 30% с 13,1 кЭ (1150 кА / м) до 18,2 кЭ (1450 кА / м), при практически неизменном M r . Ли и др. [54] также сообщили об аналогичных наблюдениях GBDP с Tb с использованием Tb 2 S 3 в спеченных магнитах Nd-Fe-B. Sepehri-Amin et al. [55] проникал Dy в Nd 10,9 Pr 3,1 Fe 77,4 Co 2,4 B 6,0 Ga 0,1 Cu 0.1 (ат.%) Промышленный спеченный магнит ГБДП выдержкой в парах Dy при 800–1000 ° C с последующей термообработкой при 500–600 ° C в течение 1–3 ч. Они пришли к выводу, что наличие оболочки (Nd, Dy) 2 Fe 14 B с улучшенным H a в сочетании со слоем GB-фазы, обогащенным RE, является существенными микроструктурными особенностями спеченных магнитов GBDP. ; первый увеличивает поле зародышеобразования от границ зерен, а второй улучшает развязку.Ma et al. [56] пропитали анизотропные спеченные магниты Dy-H и показали, что на GBDP влияет анизотропия — она более эффективна в направлении оси c, чем в перпендикулярном направлении.
Однако вышеупомянутый высокотемпературный метод GBDP не может быть использован для горячедеформированных магнитов с ультрамелкозернистыми размерами (~ 250 нм в длину и ~ 100 нм в ширину), поскольку высокотемпературный отжиг приводит к чрезмерному росту зерна. Sepehri-Amin et al. [57] представили модифицированный GBDP с использованием легкоплавких эвтектических сплавов RE-M с низкой температурой плавления (RE: Nd, Pr, Nd-Dy; M: Cu, Al и т. Д.).) в качестве источников диффузии, проникающих в границы зерен при низкой температуре 600–650 ° C для улучшения магнитной развязки между зернами Nd 2 Fe 14 B. Образование неферромагнитных богатых РЗЭ межзеренных фаз в пропитанных магнитах приводит к значительному увеличению H c , а также вызывает большое снижение M r . Akiya et al. [58] объяснили уменьшение M r ухудшением текстуры [001] зерен Nd 2 Fe 14 B и предложили способ решения проблемы путем выполнения инфильтрации при ограничении расширения.Sepehri-Amin et al. [57] выполнили низкотемпературную обработку ГБДП в порошках гидрирования, диспропорционирования, десорбции и рекомбинации (HDDR) Nd 12,5 Fe 72,8 Co 8,0 B 6,5 Сплав Ga 0,2 с Nd 80 Cu 20 и сообщил об увеличении H c с 16,5 кЭ (1321 кА / м) до 19,4 кЭ (1552 кА / м). Эта же группа выполнила ГБДП на горячедеформированном магните Nd-Fe-B с Nd 60 Dy 20 Cu 20 [59] . Увеличение с 16 кЭ (1280 кА / м) до 26 кЭ (2080 кА / м) наблюдалось в магните, пропитанном Nd 60 Dy 20 Cu 20 . Увеличение H c было объяснено совместным эффектом уменьшения ферромагнитных элементов в межзеренной фазе и образования оболочки (Nd, Dy) 2 Fe 14 B. Seelam et al. [60] использовали сплавы Nd 60 Al 10 Ni 10 Cu 20 и Pr 60 Al 10 Ni 10 Cu 20 с объемной стеклообразующей способностью и низкими температурами плавления для GBDP для увеличения коэрцитивной силы горячедеформированных магнитов и сообщил о 28 кЭ (2240 кА / м) H c .Несколько комбинаций сплавов использовались в качестве источника диффузии для GBDP для повышения H c в магнитах, полученных спеканием, SPS, горячей деформацией, включая Nd-Cu [58,61–64], Pr-Cu [63 , 65], Pr- (Cu, Al) [66], Dy-Cu [61,67,68], Pr- (Cu, Co) [12], (Nd, Pr) -Cu [69], Nd- (Ga, Cu) [70], La-Cu [63], (Nd, Dy) -Cu [67], (Nd, Tb) -Cu [67], Nd-Al [61], (Nd, Dy) -Al [61,71], Dy- (Ni, Al) [61] и (Pr, Nd, Ce) -Cu [72].
Тяговый двигатель, Принципы работы тягового двигателя, их применение, ссылки также представлены, как и другой хороший источник информации.
Тяговый двигатель См. Также: Электромобиль и Электродвигатель Тяговый двигатель — это электродвигатель, используемый для приведения в движение транспортного средства, например электровоза или электромобиля. Тяговые двигатели используются в рельсовых транспортных средствах с электроприводом, таких как электротранспортные средства, и других электрических транспортных средствах, таких как электрические молочные поплавки, лифты, конвейеры и троллейбусы, а также транспортных средствах с системами электропередачи, например, дизель-электрическими, электрические гибридные автомобили и аккумуляторные электромобили.1 Типы двигателей и управление Двигатели постоянного тока с последовательными обмотками возбуждения были самым старым типом тяговых двигателей. Они обеспечивали характеристику «скорость-крутящий момент», полезную для движения, обеспечивая высокий крутящий момент на более низких скоростях для ускорения транспортного средства и снижение крутящего момента при увеличении скорости. Благодаря расположению обмотки возбуждения с несколькими ответвлениями характеристики скорости можно было изменять, что позволяло оператору относительно плавно управлять ускорением. Еще одна мера контроля была обеспечена использованием пар двигателей на транспортном средстве; для медленной работы или больших нагрузок два двигателя могут работать последовательно от источника постоянного тока.Там, где была желательна более высокая скорость, двигатели могли работать параллельно, обеспечивая более высокое напряжение на каждом из них и, таким образом, позволяя более высокие скорости. Части железнодорожной системы могут использовать разные напряжения, с более высоким напряжением на больших расстояниях между станциями и более низким напряжением около станций, где более медленная работа была бы полезной. Вариантом системы постоянного тока был последовательный двигатель переменного тока, который, по сути, представляет собой то же устройство, но работает на переменном токе. Поскольку и якорь, и ток возбуждения меняют направление одновременно, поведение двигателя аналогично тому, когда он запитан постоянным током.Для достижения лучших условий эксплуатации железные дороги переменного тока часто снабжались током с более низкой частотой, чем коммерческие источники, используемые для общего освещения и электроснабжения; использовались специальные силовые станции тягового тока или роторные преобразователи для преобразования коммерческой мощности 50 или 60 Гц в частоту 16 2/3 Гц, используемую для тяговых двигателей переменного тока. Система переменного тока позволила эффективно распределять мощность по длине железнодорожной линии, а также позволяла регулировать скорость с помощью распределительного устройства на транспортном средстве. Асинхронные двигатели переменного тока и синхронные двигатели просты и не требуют особого обслуживания, но их неудобно применять для тяговых двигателей из-за их фиксированной характеристики скорости.Асинхронный двигатель переменного тока вырабатывает полезную мощность только в узком диапазоне скоростей, который определяется его конструкцией и частотой источника питания переменного тока. Появление силовых полупроводников позволило установить частотно-регулируемый привод на локомотив; это позволяет использовать широкий диапазон скоростей, передачу мощности переменного тока и надежные асинхронные двигатели без изнашиваемых деталей, таких как щетки и коммутаторы. [1] 2 Транспортные средства 2.1 Дорожные транспортные средства См. Также: Гибридный электромобиль и электромобиль с аккумулятором. Традиционно в дорожных транспортных средствах (легковые автомобили, автобусы и грузовики) использовались дизельные и бензиновые двигатели с механической или гидравлической трансмиссией.Во второй половине 20-го века начали разрабатываться транспортные средства с системами электропередачи (работающими от двигателей внутреннего сгорания, батарей или топливных элементов) — одно из преимуществ использования электродвигателей состоит в том, что определенные типы могут регенерировать энергию. (т.е. действовать как рекуперативный тормоз) — обеспечивая торможение, а также увеличивая общую эффективность. 2.2 Железные дороги Швейцарская железная дорога Ge 6/6 I Krokodil Локомотив с одним большим тяговым двигателем над каждой тележкой с приводом от соединительных тяг.Традиционно это были щеточные электродвигатели постоянного тока с последовательной обмоткой, обычно работающие примерно от 600 вольт. Наличие мощных полупроводников (таких как тиристоры и IGBT) в настоящее время сделало возможным использование гораздо более простых и надежных асинхронных двигателей переменного тока, известных как асинхронные тяговые двигатели. Иногда используются синхронные двигатели переменного тока, например, во французском TGV. 2.2.1 Установка двигателей До середины 20 века один большой двигатель часто использовался для привода нескольких ведущих колес через шатуны, которые были очень похожи на те, что используются на паровозах.Примерами являются Пенсильванская железная дорога DD1, FF1 и L5, а также различные швейцарские крокодилы. В настоящее время стандартной практикой является использование одного тягового двигателя, приводящего в движение каждую ось через зубчатую передачу. Тяговый двигатель с носовой подвеской для чешского локомотива ČD класса 182 Обычно тяговый двигатель подвешивается по трем точкам между рамой тележки и ведомой осью; это называется «тяговым двигателем с носовой подвеской». Проблема с такой компоновкой заключается в том, что часть веса двигателя не подрессорена, что увеличивает нежелательные силы на гусенице.В случае знаменитой Пенсильванской железной дороги GG1 два установленных на тележке двигателя приводили в движение каждую ось через гусеничный привод. «Биполярные» электровозы, построенные General Electric для Милуоки-роуд, имели двигатели с прямым приводом. Вращающийся вал двигателя был также осью для колес. В случае французских силовых вагонов TGV двигатель, установленный на раме силового вагона, приводит в движение каждую ось; привод «тренога» обеспечивает небольшую гибкость трансмиссии, позволяя тележкам грузовиков поворачиваться.За счет установки относительно тяжелого тягового двигателя непосредственно на раму силового автомобиля, а не на тележку, достигается лучшая динамика, позволяющая работать на высоких скоростях [2]. 2.2.2 Обмотки Двигатель постоянного тока на протяжении многих лет служил основой электрических тяговых приводов как на электрических, так и на дизель-электрических локомотивах, трамваях и дизель-электрических буровых установках. Он состоит из двух частей: вращающегося якоря и неподвижных обмоток возбуждения, окружающих вращающийся якорь, установленных вокруг вала. Обмотки фиксированного возбуждения состоят из плотно намотанных катушек провода, помещенных внутри корпуса двигателя.Арматура представляет собой еще один набор катушек, намотанных вокруг центрального вала и подключенных к обмоткам возбуждения через «щетки», которые представляют собой подпружиненные контакты, прижимающие к растяжению якоря, называемого коммутатором. Коммутатор собирает все выводы катушек якоря и распределяет их по кругу, чтобы обеспечить правильную последовательность протекания тока. Когда якорь и обмотки возбуждения соединены последовательно, весь двигатель называется «с последовательной обмоткой».Двигатель постоянного тока с последовательной обмоткой имеет поле с низким сопротивлением и цепь якоря. Из-за этого, когда на него подается напряжение, по закону Ома ток становится высоким. Преимущество сильного тока в том, что внутри двигателя сильные магнитные поля, создающие большой крутящий момент (крутящее усилие), поэтому он идеально подходит для запуска поезда. Недостатком является то, что ток, протекающий в двигатель, должен быть ограничен, иначе источник питания может быть перегружен или двигатель и его кабели могут быть повреждены. В лучшем случае крутящий момент превысит сцепление, и ведущие колеса проскочат.Традиционно для ограничения начального тока использовались резисторы. 2.2.3 Регулировка мощности Когда двигатель постоянного тока начинает вращаться, взаимодействие внутренних магнитных полей заставляет его генерировать внутреннее напряжение. Эта обратная ЭДС (электродвижущая сила) противостоит приложенному напряжению, а протекающий ток зависит от разницы между ними. По мере увеличения скорости двигателя внутреннее генерируемое напряжение растет, результирующая ЭДС падает, через двигатель проходит меньше тока и крутящий момент падает. Двигатель, естественно, перестает ускоряться, когда сопротивление поезда соответствует крутящему моменту, создаваемому двигателями.Чтобы продолжить ускорение поезда, последовательно отключаются резисторы, каждый шаг увеличивая эффективное напряжение и, таким образом, ток и крутящий момент на некоторое время, пока двигатель не догонит его. В старых поездах постоянного тока это можно услышать и почувствовать как серию ударов под полом, каждый из которых сопровождается рывком ускорения, поскольку крутящий момент внезапно увеличивается в ответ на новый всплеск тока. Когда в цепи не осталось резисторов, полное линейное напряжение подается непосредственно на двигатель.Скорость поезда остается постоянной в точке, где крутящий момент двигателя, регулируемый действующим напряжением, равен сопротивлению — иногда это называется уравновешивающей скоростью.