Режимы работы асинхронного двигателя | Мир инженера
Приветствую тебя, дорогой и уважаемый читатель сайта “world-engineer.ru”. В одной из статей посвященной шаровым кранам с электроприводом я затронул вопрос о работе асинхронного двигателя и пообещал рассказать о нём в другой статье. Так что в этой статье вы узнаете принцип работы асинхронного двигателя.
Асинхронный двигатель предназначен для работы в продолжительном режиме работы (условное обозначение S1), при котором нагрузка, приложенная к валу и условия охлаждения двигателя практически постоянны в промежутке времени, достаточном для нагрева двигателя до установившейся температуры.
Правильный расчет усредненных величин КПД и коэффициента мощности особенно важен при выборе геометрических размеров, расчета потерь, нагрева и охлаждения, и выборе установленной мощности стандартных двигателей, применяемых для работы в кратковременных и повторно-кратковременных режимах.
Для асинхронных двигателей совокупность кратковременных, повторно-кратковременных и перемежающихся режимов работы подразделяется на 7 групп с условными обозначениями S2…S8.
Кратковременный режим (S2), режим при, котором двигатель не успевает достигнуть номинальной температуры нагрева частей за время работы при постоянной нагрузке, и успевает охладиться до температуры окружающей среды за время пауз.
Повторно-кратковременный режим (S3) работы асинхронного двигателя, характерен для условий работы, при котором продолжительность цикла (10 мин) намного больше времени пуска (т.е. переходной процесс при пуске не влияет на нагрев двигателя и не учитываются). Продолжительность рабочего времени в течении цикла, задается в процентах от времени цикла 5%, 25%, 40% и 60%.
В режимах (S4), в отличие от (S3), продолжительность цикла настолько мала, что процессы, происходящие во время пуска (увеличение потерь из за многократного превышения величин пусковых токов над номинальным), оказывают непосредственное влияние на нагрев машины. Длительность цикла, в этом случае, определяется продолжительностью рабочего времени в процентах от времени цикла и числом включений в час.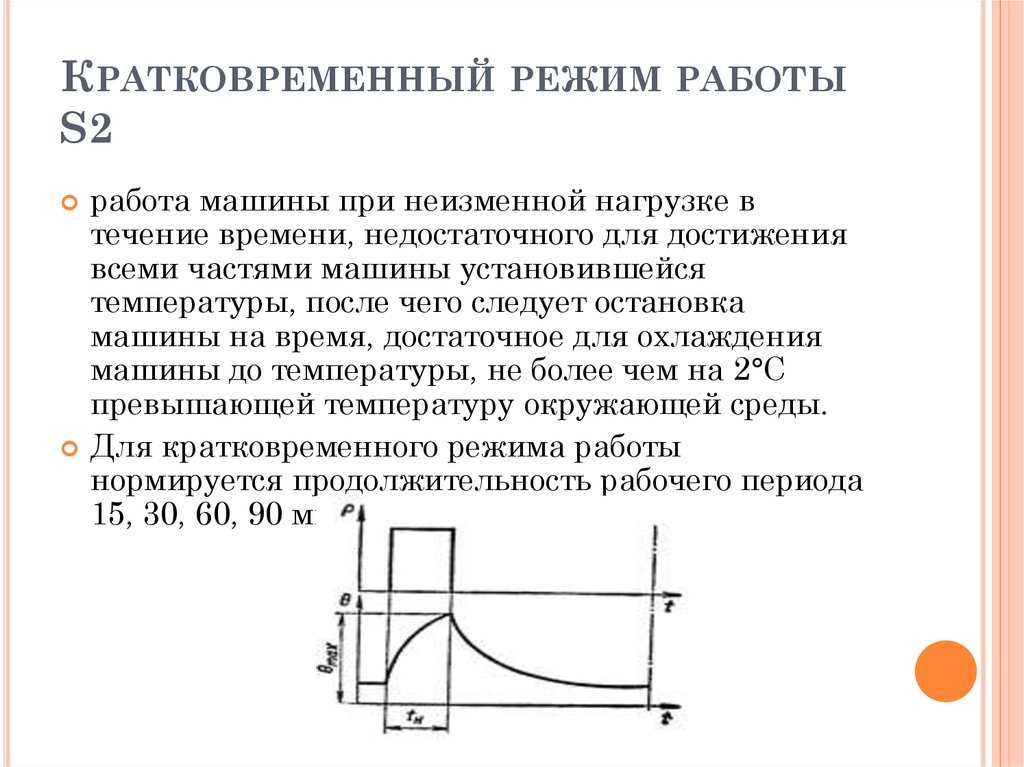 Поскольку характер переходного процесса во многом определяется динамической нагрузкой на валу, дополнительно задается допускаемый коэффициент инерции (отношение суммы моментов инерции ротора и приведенного к скорости вращения ротора, момента инерции приводного механизма к моменту инерции ротора), на который рассчитан двигатель из условий нормального нагрева.
Поскольку характер переходного процесса во многом определяется динамической нагрузкой на валу, дополнительно задается допускаемый коэффициент инерции (отношение суммы моментов инерции ротора и приведенного к скорости вращения ротора, момента инерции приводного механизма к моменту инерции ротора), на который рассчитан двигатель из условий нормального нагрева.
Режимы работы асинхронного двигателя, при которых в конце каждого цикла предусмотрено электрическое торможение двигателя обозначаются (S5). Продолжительности включения в этом случае, рассчитывается с учетом времени электрического торможения.
Перемежающийся режим (S6) повторяет условия работы режима (S3) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения. Учет пусковых потерь на нагрев двигателя не производится.
Перемежающийся режим (S7) повторяет условия работы режима (S4) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения.
Перемежающийся режим (S8) повторяет условия работы режима (S7) с учетом того что, в этом режиме допускается работа двигателя на нескольких разных скоростях вращения с разными величинами нагрузки на валу.
Особенности определения установленной мощности в кратковременном (S2) и повторно-кратковременном режиме эксплуатации (S3, S6)
В кратковременном (S2) и повторно-кратковременных режимах эксплуатации (S3, S6) электродвигатели могут работать с большей установленной мощностью, чем в длительном режиме работы (S1).
Возможное значение величины превышения мощности рекомендуется определять из условия сохранения перегрузочной способности асинхронного двигателя по максимальному моменту в пределах:
МКР / (МN*KP) >= 1,6
При больших числах включения и больших маховых массах определение мощности рекомендуется производить исходя из:
- относительной продолжительности включения;
- частоты включения;
- величины внешнего момента инерции;
- нагрузочной диаграммы привода;
- типа торможения.

Рекомендуемые коэффициенты превышения установленной мощности
| S2 | Коэффициент превышения | S3 | Коэффициент превышения | S6 | Коэффициент превышения |
| 10 мин | 1,4 | 25% | 1,33 | 25% | 1,45 |
| 30 мин | 1,15 | 40% | 1,18 | 40% | 1,35 |
| 60% | 1,08 | 60% | 1,15 |
В настоящее время отменен ГОСТ 183-74 Машины электрические вращающиеся. Общие технические условия. И теперь взамен этого ГОСТ, действует ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики.
Согласно, актуальному ГОСТ режим работы асинхронного двигателя (электрических машин) выбирается из типовых режимов от S1 до S10:
S1 – продолжительный режим. Работа асинхронного двигателя с постоянной нагрузкой и продолжительностью;
S2 – кратковременный режим.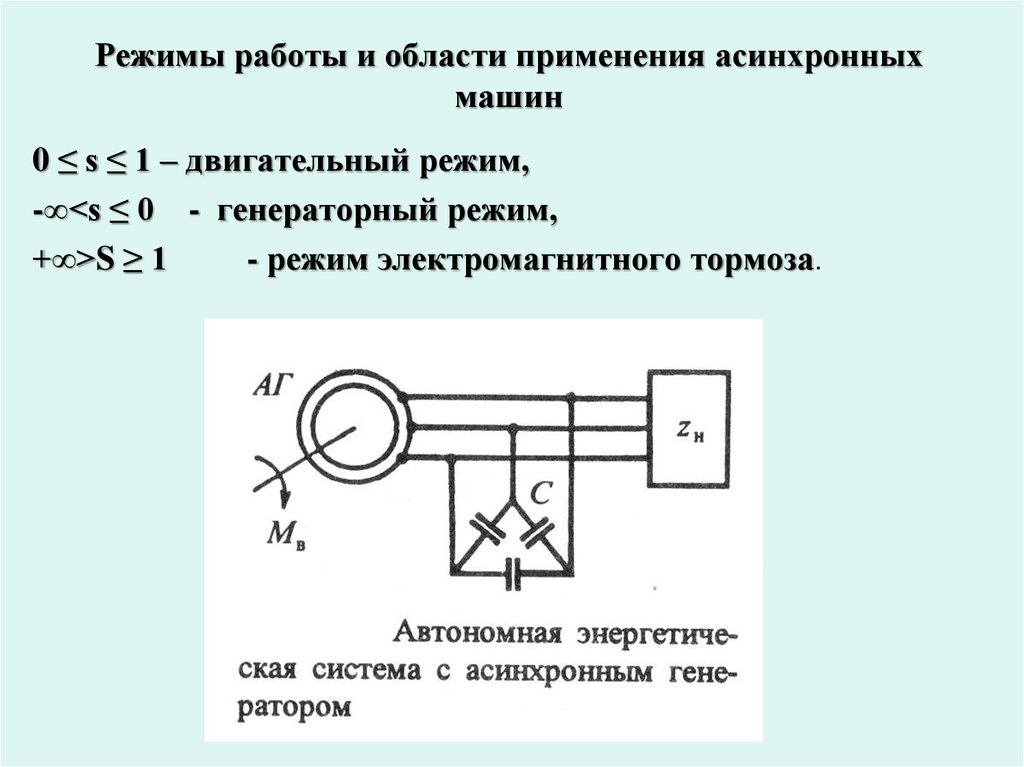 Работа асинхронного двигателя с постоянной нагрузкой в течении определенного времени. Вариант обозначения S2 60 мин;
Работа асинхронного двигателя с постоянной нагрузкой в течении определенного времени. Вариант обозначения S2 60 мин;
S3 – повторно-кратковременный периодический режим. Работа асинхронного двигателя при последовательных одинаковых рабочих циклах. Вариант обозначения S3 25%;
S4 – повторно-кратковременный периодический режим с пусками;
S5 — повторно-кратковременный периодический режим с электрическим торможением;
S6 — непрерывный периодический режим с кратковременной нагрузкой;
S7 — непрерывный периодический режим с электрическим торможением;
S8 — непрерывный периодический режим с взаимозависимыми изменениями нагрузки и частоты вращения;
S9 — режим с непериодическими изменениями нагрузки и частоты вращения;
S10 — режиме дискретными постоянными нагрузками и частотами вращения.
Более подробную информацию можете изучить в ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики.
Поделиться ссылкой:
§78. Режимы работы асинхронных двигателей
Режимы работы асинхронных двигателей.
Холостой ход.
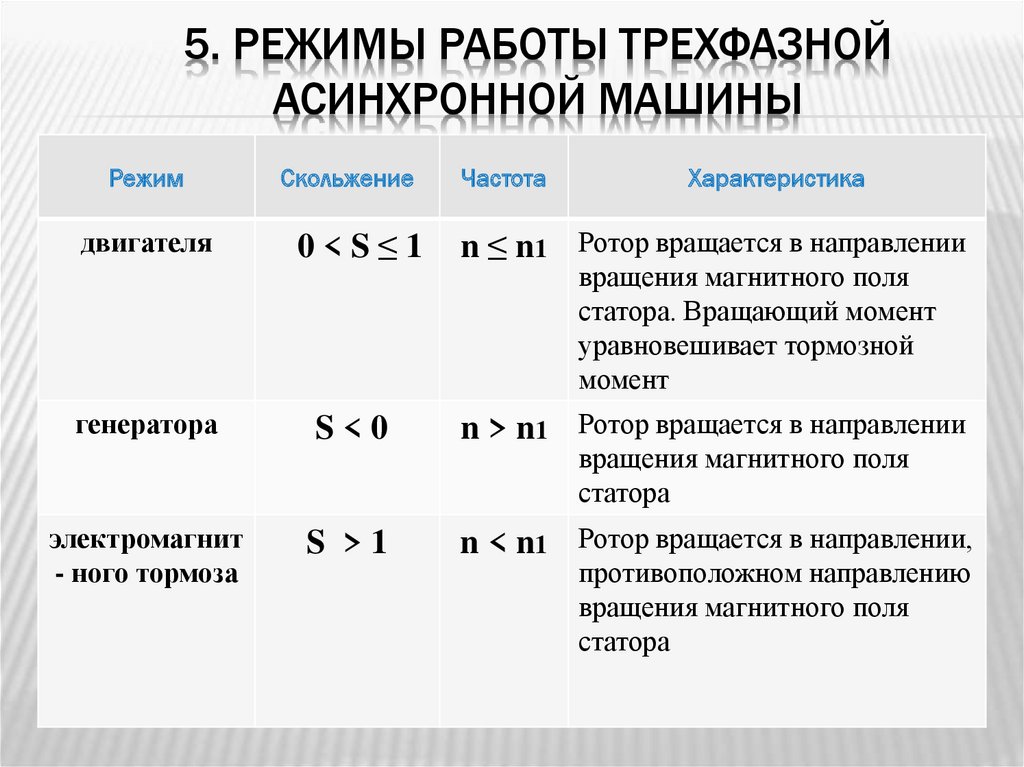
Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток.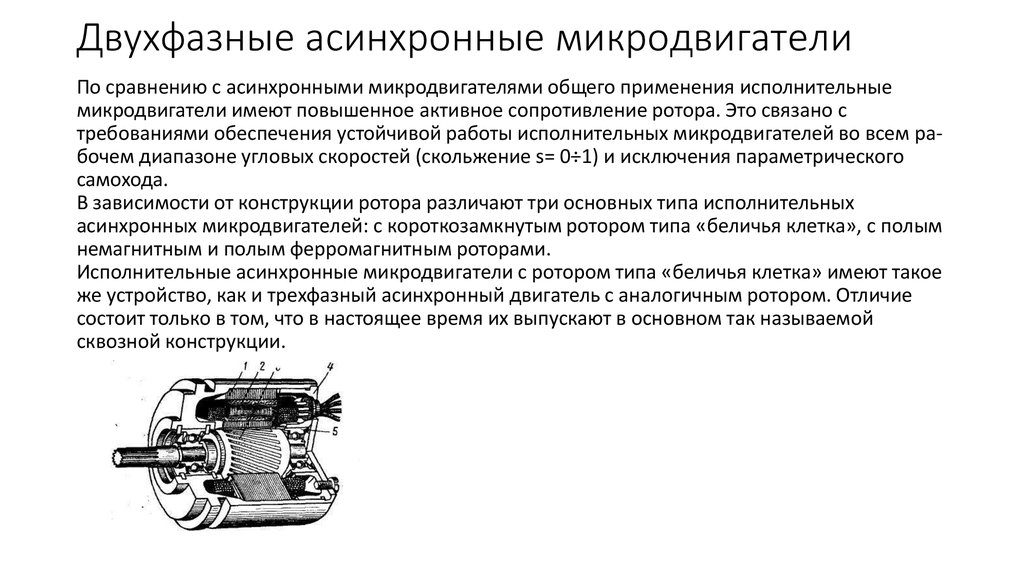
Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры.
Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим.
Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается.
Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М.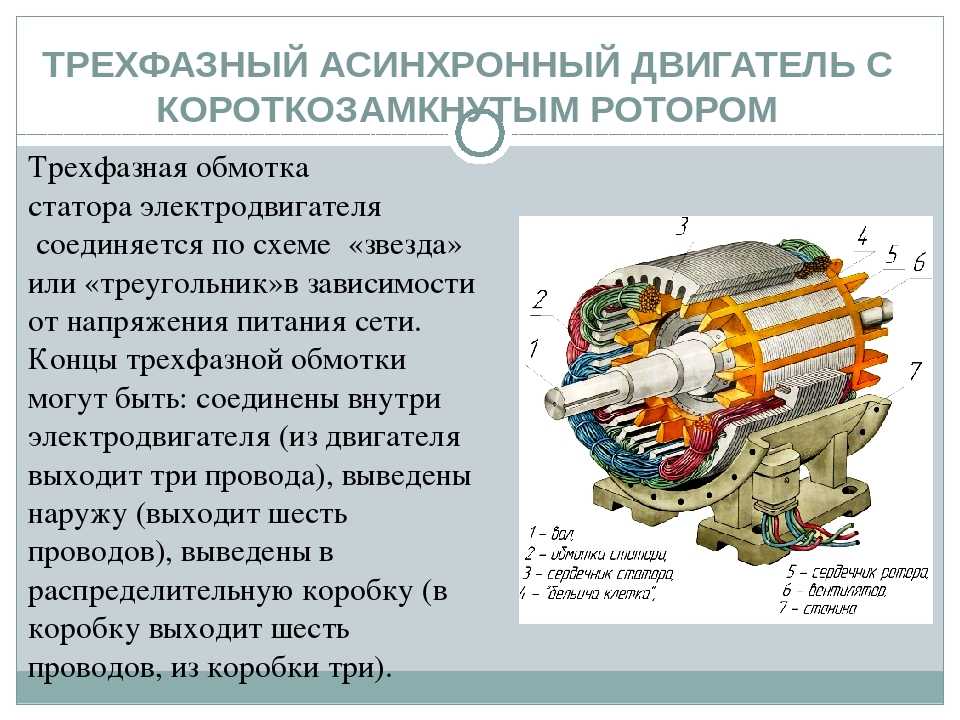 Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн.
Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн.
При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
Следовательно,
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cosφ1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260).
Рис. 260. Энергетическая диаграмма асинхронного двигателя
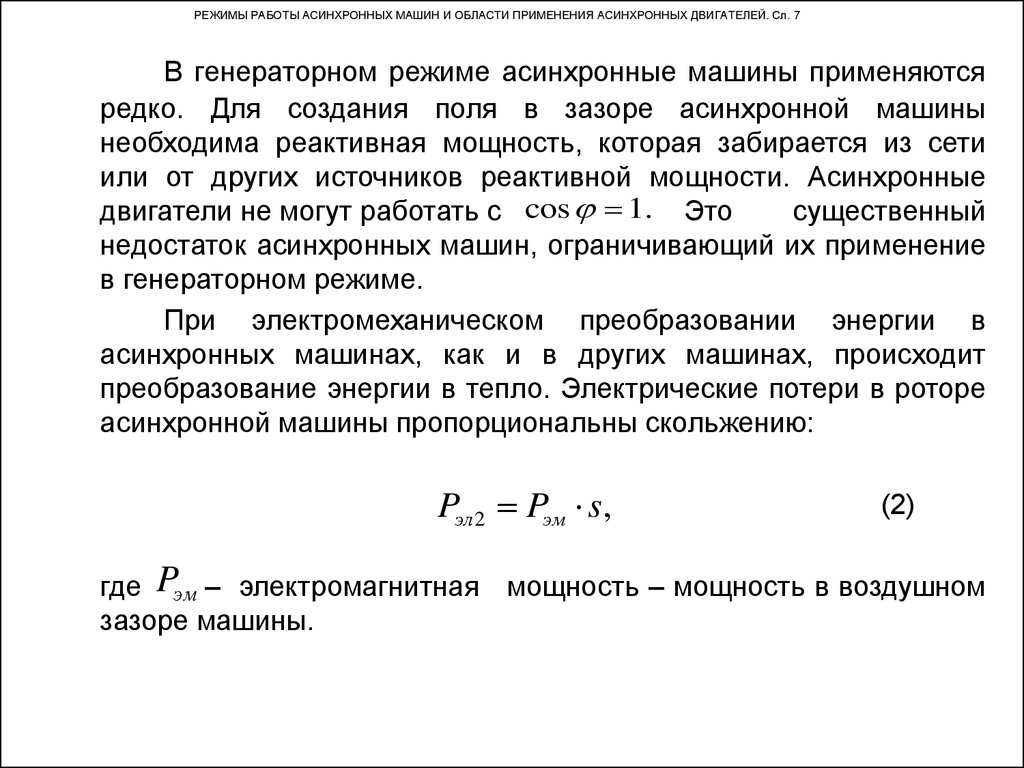
В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ΔРэл1 и ротора ΔРэл2, магнитные ΔРм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ΔРмх от трения в подшипниках и вращающихся частей о воздух.
Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cosφ2 (здесь φ2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора).
Поэтому
M = cмФтI2 cosφ2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.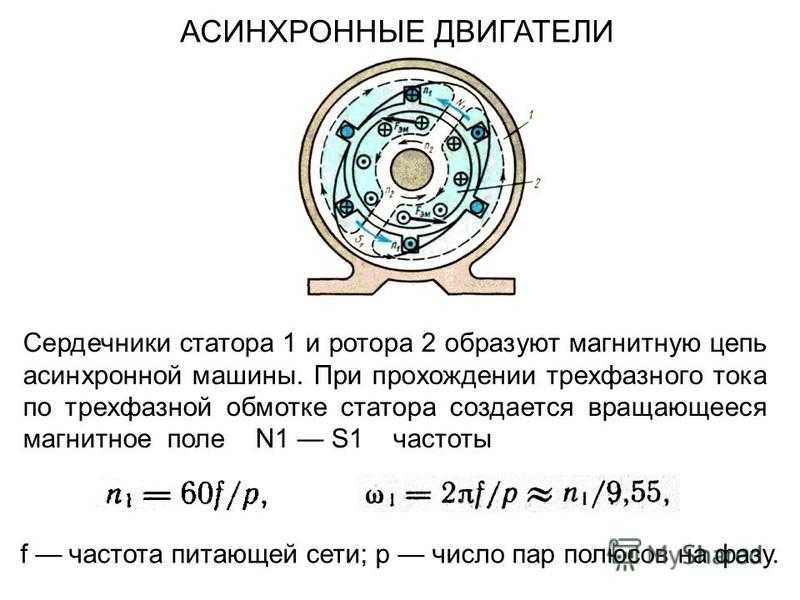
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников.
Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем.
Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — φ2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге φ2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол φ2. Электромагнитный момент М зависит от скольжения s.
Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол φ2. Электромагнитный момент М зависит от скольжения s.
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cosφ2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos φ2, вследствие чего активная составляющая тока в обмотке ротора I2cos φ2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos φ2 и электромагнитный момент М уменьшаются.
При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos φ2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска.
В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре.
д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре.
Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Асинхронный двигатель | Асинхронный двигатель
Наиболее часто используемым двигателем в мире является асинхронный двигатель или асинхронный двигатель. Это двигатель, который может работать без электрического подключения к ротору. В этом посте будут обсуждаться асинхронные двигатели (асинхронные двигатели), их типы, т. е. однофазные, трехфазные, короткозамкнутые, токосъемные и т. д., особенности, принципы работы, области применения, преимущества и недостатки.
Сдвиговые регистры в программировании ПЛК . ..
..
Включите JavaScript
Сдвиговые регистры в программировании ПЛК — Инструкция SFT — Курс Omron
Что такое асинхронный двигатель , что означает вспомогательную обмотку только на якоре. В асинхронном двигателе (или асинхронном двигателе) статорная часть двигателя обеспечивает электромагнитное поле своей обмоткой роторной части двигателя. Это генерирует электрический ток в роторе. Электрический ток создает крутящий момент, который приводит в движение. 9Рис. 1. Знакомство с асинхронным двигателем Синхронная скорость определяется как скорость магнитного поля вращающейся машины, которая снова определяется количеством полюсов и частотой в машине.
Поскольку в этом типе двигателя ротор получает поток и вращение за счет магнитного поля в статоре, между токами в статоре и роторе возникает задержка. Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда и термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Fig. 2 – Parts of Induction Motor (Asynchronous Motor)
Construction of Induction Motor (Asynchronous Motor)
It consists of mainly two parts namely:
- Stator
- Rotor
Stator
Стационарная часть электродвигателя. Эта часть обеспечивает электромагнитное поле, необходимое для привода вращающейся части двигателя. Он состоит из ряда штамповок с прорезями для трехфазной обмотки. Каждая обмотка отделена на 120 градусов от другой обмотки.
Ротор
Это вращающаяся часть двигателя. Более распространенным типом ротора в асинхронных двигателях (или асинхронных двигателях) является короткозамкнутый ротор. Ротор выполнен в виде якоря с сердечником цилиндрической формы. Вокруг сердечника расположены параллельные щели, через которые проходит проводимость. Сердечник имеет стержень из алюминия, меди или сплава.
Рис. 3 – Основной ротор и статор
Типы асинхронных двигателей (асинхронных двигателей)
Он подразделяется на два типа:
- Однофазный асинхронный двигатель
- Трехфазный асинхронный двигатель
Однофазный асинхронный двигатель
Однофазный асинхронный двигатель не является самозапускающимся двигателем. Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток на основную обмотку. Поскольку переменный ток представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток на основную обмотку. Поскольку переменный ток представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Пульсирующие магнитные поля представляют собой два магнитных поля, вращающихся в противоположных направлениях; следовательно, крутящий момент не создается. Таким образом, после подачи тока ротор должен двигаться в любом направлении извне, чтобы двигатель начал работать. Следовательно, однофазный индуктор; могут иметь разные разновидности в зависимости от устройства, которое используется для пуска двигателя и составляют:
- Двигатель сплит -фазы
- Заштрихованный полюсный двигатель
- Пуск. Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель (асинхронный двигатель)
Это двигатели, для запуска которых не требуется никаких внешних устройств, таких как конденсатор, центробежный выключатель или пусковая обмотка.
Принцип работы этого двигателя основан на трех одиночных фазах, между которыми разность фаз составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разницу фаз между ними, что заставит ротор двигаться без какого-либо внешнего крутящего момента.Для дальнейшего упрощения предположим, что есть три фазы: фаза 1, фаза 2 и фаза 3. Таким образом, первая фаза 1 намагничивается, и ротор начинает двигаться в этом направлении, вскоре после этого возбуждается фаза 2, и затем ротор притягивается к фазе 2, а затем, наконец, к фазе 3. Таким образом, ротор будет продолжать вращаться.
Далее они делятся на категории в зависимости от типа используемого ротора:
- Асинхронный двигатель с короткозамкнутым ротором
- Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Асинхронный двигатель с короткозамкнутым ротором
В этом типе ротор имеет форму короткозамкнутого ротора, отсюда и название.
Ротор изготовлен из стали с металлами с очень высокой проводимостью, такими как алюминий и медь, на его поверхности. Очень легко изменить скорость этого типа асинхронного двигателя, просто изменив форму стержней в роторе. Рис. 5 – Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Также известен как асинхронный двигатель с фазовой обмоткой. Здесь ротор подключен к внешнему сопротивлению через токосъемные кольца. Скорость ротора регулируется путем регулировки внешнего сопротивления. Поскольку этот двигатель имеет больше обмоток, чем асинхронный двигатель с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.
Рис. 6 – Асинхронный двигатель с контактными кольцами
Особенности асинхронного двигателя
Ниже приведены характеристики двух различных типов асинхронных двигателей.
Особенности однофазного асинхронного двигателя
- Здесь мы выделим некоторые характеристики, применимые только к однофазным асинхронным двигателям:
- Однофазные асинхронные двигатели не запускаются самостоятельно и используют однофазное питание. для вращения.
- Чтобы изменить направление вращения в однофазных двигателях, лучше всего остановить двигатель и изменить его, иначе существует вероятность повреждения двигателя из-за момента инерции, который действует против направления, на которое необходимо изменить вращение.
- Для запуска двигателя вам потребуется конденсатор и/или центробежный выключатель.
- У этих двигателей низкий пусковой момент.
- Они в основном используются дома или в бытовых приборах из-за низкого коэффициента мощности и эффективности.
Особенности трехфазного асинхронного двигателя
Ниже перечислены некоторые особенности трехфазного асинхронного двигателя, отличающие его от однофазного двигателя:
- Это двигатели с автоматическим запуском и не требуют специальных стартеров.
- Имеется три однофазных линии с разницей фаз 120 градусов.
- Имеет более простое подключение и более надежен, чем однофазные асинхронные двигатели.
- Пусковой момент этих двигателей выше, чем у однофазных двигателей.
- Они в основном используются на заводах и в промышленности из-за высокого коэффициента мощности и эффективности.
Как работает асинхронный двигатель (асинхронный двигатель) Работа
Явление, благодаря которому работают асинхронные или асинхронные двигатели, весьма интересно. Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно к статору, а другое к ротору. Но в этих двигателях нам нужно дать его только статору, что делает его уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте выполним ряд шагов, которые происходят при вращении этого двигателя:
- Питание подается на обмотки статора, протекает ток и создается магнитный поток.
- Обмотка в роторе устроена таким образом, что каждая катушка замыкается накоротко.
- Короткозамкнутая обмотка ротора разрезается магнитным потоком статора.
Рис. 7 – Работа асинхронного двигателя
Согласно законам электромагнитной индукции Фарадея, магнитное поле взаимодействует с электрической цепью, создавая ЭДС (электродвижущую силу). Итак, на основании этого закона в обмотках ротора начинает течь ток.
- Ток в роторе создает другой поток.
- Теперь есть два потока, один в статоре, а другой в роторе.
- Поток ротора отстает от потока статора, что может создать крутящий момент в роторе в направлении магнитного поля.
Применение асинхронных двигателей
Области применения включают:
- Они широко используются в миксерах, игрушках, вентиляторах и т. д.
- Они также используются в насосах и компрессорах.
- Малые асинхронные двигатели используются в электробритвах.
- Они используются в буровых машинах, лифтах, кранах и дробилках.
- Они подходят для приводов текстильных и маслоэкстракционных заводов.
Преимущества асинхронного двигателя
Ниже приведены некоторые преимущества асинхронных двигателей:
- Высокая эффективность и простота конструкции.
- Очень прочный и может работать в любых условиях.
- Низкие эксплуатационные расходы, так как в них мало таких деталей, как коллекторы или щетки.
- Они могут развивать очень высокую скорость, не беспокоясь об износе, так как у них нет щеток.
- Они просты в эксплуатации, так как не имеют электрических разъемов для ротора.
- Поскольку у них нет щеток, искры не опасны, поэтому их можно использовать в загрязненных или взрывоопасных средах.
- Изменение скорости от малой нагрузки до номинальной очень мало.
Недостатки асинхронного двигателя
Асинхронные двигатели имеют простую конструкцию, которая может иметь несколько недостатков, перечисленных ниже:
- Трудно контролировать скорость асинхронного двигателя, поэтому его нельзя использовать в местах, требующих точного контроля скорости. .
- Падение эффективности при малых нагрузках.
- Имеют высокие входные импульсные токи, что приводит к низкому напряжению при пуске двигателя.
См. также: Видео на Youtube по асинхронным двигателям
Читайте также: Маховик как накопитель энергии, расчеты и требования к ротору Повышающий трансформатор — работа, конструкция, применение и преимущества Синхронный двигатель - конструкция, принцип, типы, характеристики Что такое токоизмерительные клещи (Tong Tester) — типы, принцип работы и способы работы
Типы и удивительные области применения асинхронных двигателей
Асинхронные машины — это наиболее часто используемый тип двигателя, используемый в жилых, коммерческих и промышленных настройки пока. В асинхронном двигателе электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора.
Принси А. Дж |
04 июня 2020 г.Асинхронный двигатель — это обычно используемый электродвигатель переменного тока. В асинхронном двигателе электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора. Ротор асинхронного двигателя может быть ротором с короткозамкнутым ротором или ротором с обмоткой.
Используемые в различных приложениях асинхронные двигатели также называются асинхронными двигателями. Это связано с тем, что асинхронный двигатель всегда работает на более низкой скорости, чем синхронная скорость. Скорость вращающегося магнитного поля в статоре называется синхронной скоростью.
Асинхронные машины являются наиболее часто используемым типом двигателя, используемого в жилых, коммерческих и промышленных условиях. Характерными особенностями этих трехфазных двигателей переменного тока являются:
- Простая и грубая конструкция
- Доступная цена и низкие эксплуатационные расходы
- Высокая надежность и высокий профессионализм
- Не требует дополнительного пускового двигателя и не требует синхронизации
Два типа асинхронных двигателей
Однофазный асинхронный двигатель
Однофазный асинхронный двигатель не запускается самостоятельно.
По основной обмотке протекает спорадический ток, когда двигатель подключен к однофазному источнику питания. Вполне логично, что самый дешевый и простой в обслуживании механизм сортировки должен использоваться наиболее регулярно. В зависимости от способа запуска эти машины классифицируются по-разному. Это двигатели с экранированными полюсами, расщепленные фазы и конденсаторные двигатели. Кроме того, конденсаторные двигатели запускаются с конденсатором, работают с конденсатором и имеют двигатели с постоянным конденсатором.В этих однофазных двигателях пусковая обмотка может иметь последовательный конденсатор и центробежный выключатель. Когда подается напряжение питания, ток в основной обмотке удерживает напряжение питания из-за импеданса основной обмотки. А ток в пусковой обмотке опережает/отстает, напряжение питания зависит от импеданса пускового механизма. Угол между двумя обмотками является достаточной разностью фаз, чтобы обеспечить вращающееся магнитное поле для создания пускового момента.
В момент, когда двигатель достигает 70-80% синхронной скорости, центробежный переключатель на валу двигателя размыкается и отключает пусковую обмотку.Применение однофазных асинхронных двигателей
Однофазные асинхронные двигатели используются в маломощных устройствах. Эти двигатели широко используются в быту и промышленности. Ниже перечислены некоторые области применения:
- Насосы
- Компрессоры
- Маленькие вентиляторы
- Смесители
- Игрушки
- Высокоскоростные пылесосы
- Электробритвы
- Сверлильные станки
Трехфазный асинхронный двигатель:
Поскольку трехфазные асинхронные двигатели самозапускающиеся, не используют пусковую обмотку, центробежный переключатель, конденсатор или другое пусковое устройство. Трехфазные асинхронные двигатели переменного тока имеют различное применение в коммерческих и промышленных целях. Трехфазные асинхронные двигатели бывают двух типов: с короткозамкнутым ротором и с контактным кольцом.
Особенности, которые делают двигатели с короткозамкнутым ротором широко применимыми, в основном заключаются в их простой конструкции и прочной конструкции. С внешними резисторами двигатели с контактными кольцами могут иметь высокий пусковой момент.Трехфазные асинхронные двигатели широко используются в бытовых и промышленных устройствах, поскольку они имеют прочную конструкцию, практически не требуют обслуживания, сравнительно дешевле и требуют питания только статора.
Применение трехфазного асинхронного двигателя
- Лифты
- Краны
- Подъемники
- Вытяжные вентиляторы большой мощности
- Привод токарных станков
- Дробилки
- Мельницы маслоэкстракционные
- Текстиль и др.
Об авторе (авторах)
Принси А. Дж.
Принси имеет степень бакалавра в области гражданского строительства, полученную в престижном Тамил Наду доктором М.Г.Р. Университет в Ченнаи, Индия. После успешной академической успеваемости она продолжила свою страсть к писательству.
Тщательный профессионал и писатель-энтузиаст, она любит писать о различных категориях и достижениях в мировых отраслях. Она играет важную роль в написании текущих обновлений, новостей, блогов и тенденций.Последнее сообщение
Синтетическая камфора: химическое соединение, обладающее многочисленными преимуществами в промышленности и личной жизни
14 декабря 2022 г.
Почему люди устанавливают грудные имплантаты? И какие риски с этим связаны?
14 декабря 2022 г.
Каковы основные виды деятельности, возможности и важность коммуникативной разведки?
12 декабря 2022 г.
 Принцип работы этого двигателя основан на трех одиночных фазах, между которыми разность фаз составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разницу фаз между ними, что заставит ротор двигаться без какого-либо внешнего крутящего момента.
Принцип работы этого двигателя основан на трех одиночных фазах, между которыми разность фаз составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разницу фаз между ними, что заставит ротор двигаться без какого-либо внешнего крутящего момента. Ротор изготовлен из стали с металлами с очень высокой проводимостью, такими как алюминий и медь, на его поверхности. Очень легко изменить скорость этого типа асинхронного двигателя, просто изменив форму стержней в роторе.
Ротор изготовлен из стали с металлами с очень высокой проводимостью, такими как алюминий и медь, на его поверхности. Очень легко изменить скорость этого типа асинхронного двигателя, просто изменив форму стержней в роторе. 
 .
.
 По основной обмотке протекает спорадический ток, когда двигатель подключен к однофазному источнику питания. Вполне логично, что самый дешевый и простой в обслуживании механизм сортировки должен использоваться наиболее регулярно. В зависимости от способа запуска эти машины классифицируются по-разному. Это двигатели с экранированными полюсами, расщепленные фазы и конденсаторные двигатели. Кроме того, конденсаторные двигатели запускаются с конденсатором, работают с конденсатором и имеют двигатели с постоянным конденсатором.
По основной обмотке протекает спорадический ток, когда двигатель подключен к однофазному источнику питания. Вполне логично, что самый дешевый и простой в обслуживании механизм сортировки должен использоваться наиболее регулярно. В зависимости от способа запуска эти машины классифицируются по-разному. Это двигатели с экранированными полюсами, расщепленные фазы и конденсаторные двигатели. Кроме того, конденсаторные двигатели запускаются с конденсатором, работают с конденсатором и имеют двигатели с постоянным конденсатором.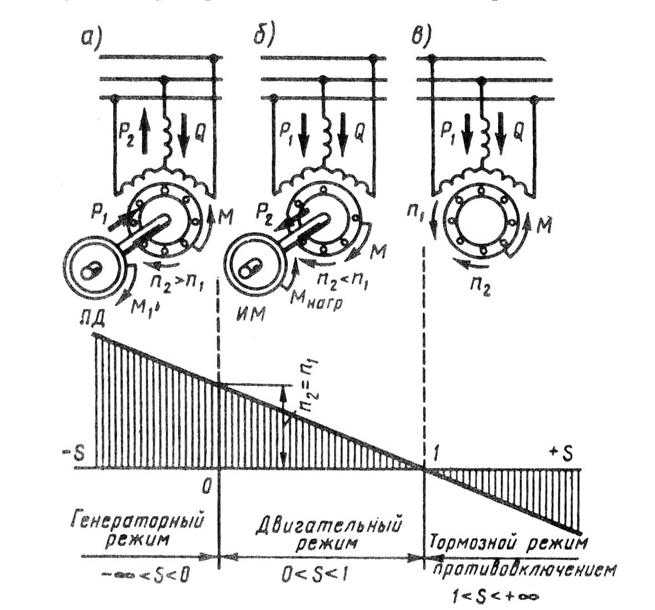 В момент, когда двигатель достигает 70-80% синхронной скорости, центробежный переключатель на валу двигателя размыкается и отключает пусковую обмотку.
В момент, когда двигатель достигает 70-80% синхронной скорости, центробежный переключатель на валу двигателя размыкается и отключает пусковую обмотку. Особенности, которые делают двигатели с короткозамкнутым ротором широко применимыми, в основном заключаются в их простой конструкции и прочной конструкции. С внешними резисторами двигатели с контактными кольцами могут иметь высокий пусковой момент.
Особенности, которые делают двигатели с короткозамкнутым ротором широко применимыми, в основном заключаются в их простой конструкции и прочной конструкции. С внешними резисторами двигатели с контактными кольцами могут иметь высокий пусковой момент. Тщательный профессионал и писатель-энтузиаст, она любит писать о различных категориях и достижениях в мировых отраслях. Она играет важную роль в написании текущих обновлений, новостей, блогов и тенденций.
Тщательный профессионал и писатель-энтузиаст, она любит писать о различных категориях и достижениях в мировых отраслях. Она играет важную роль в написании текущих обновлений, новостей, блогов и тенденций.