5.10. КПД и коэффициент мощности асинхронного двигателя
5. Асинхронные машины
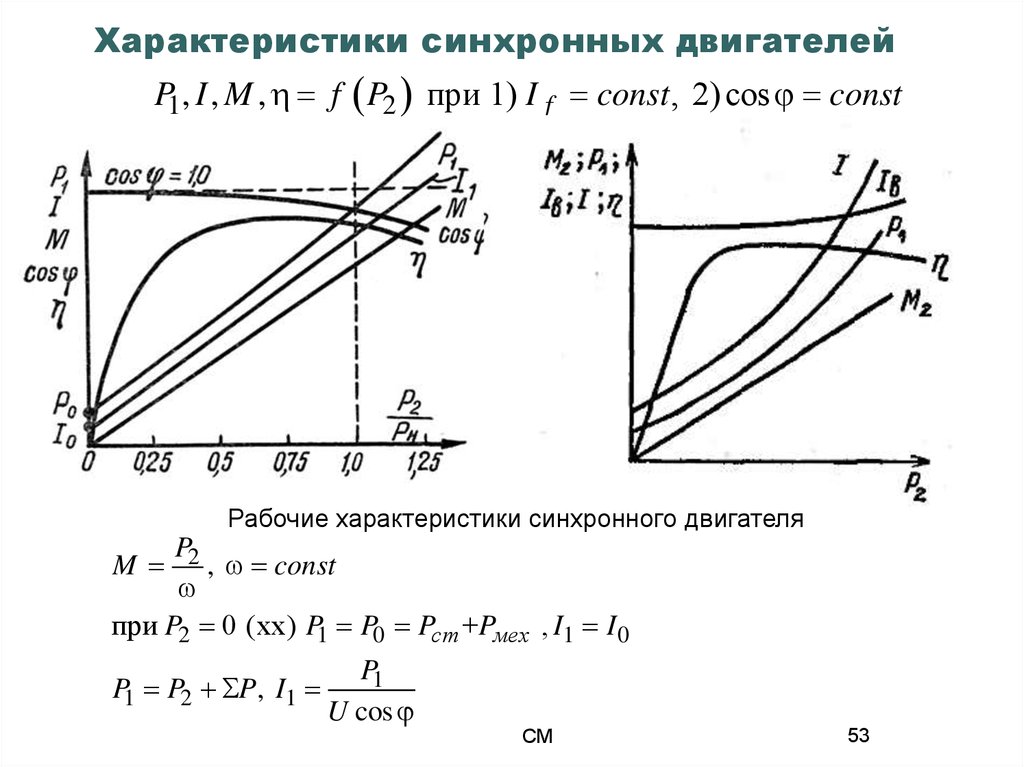
ности при увеличении полезной нагрузки P2 (рис. 5.24). Ток и потребляемая мощность при значении полезной мощности, равном нулю, отличны от нуля и определяются величиной тока и мощности холостого хода.
Коэффициент полезного действия электродвигателя
η =1− | рΣ | =1− | рΣ |
|
| , | (5.115) |
| Р + | р |
| ||||
| Р | Σ |
| ||||
| 1 |
| 2 |
|
| ||
где p∑ – суммарные потери мощности; P1 – потребляемая асинхронным двигателем (его статорной обмоткой) активная электрическая мощность; P2 – полезная механическая мощность (снимаемая с вала двигателя).
КПД современных асинхронных двигателей при номинальной нагрузке для машин мощностью свыше 100 кВт составляет 0,92−0,96, мощностью 1−100 кВт – 0,7−0,9, а микромашин – 0,4−0,6 (большие значения относятся к машинам большей мощности).
Так же, как в трансформаторе, потери мощности асинхронного двигателя следует разделить на потери постоянные и переменные (или потери холостого хода и короткого замыкания). Постоянные потери не зависят от нагрузки. Это потери магнитные, механические, электрические холостого хода.
Магнитные потери определяются аналогично магнитным потерям трансформатора с помощью формулы Штейнметца:
р |
| = k | p | B | 2 |
| f | 1,3 | G , | (5.116) |
|
|
|
|
| ||||||
|
|
| ||||||||
| мг |
| d 1,0 / 50 |
|
| 50 |
| с |
| |
где p1,0/50 – удельные потери в стали на единицу массы при частоте 50 Гц и индукции 1,0 Тл; B – индукция на участке магнитопровода; Gc – масса
сердечника (магнитопровода) или его участка.
Частота перемагничивания в роторе f2 = f1s в рабочем режиме двигателя существенно меньше частоты магнитной индукции в статоре; масса магнитопровода ротора также меньше аналогичной массы статора. Обычно в практических расчетах асинхронных двигателей общепромышленного применения пренебрегают магнитными потерями в роторе.
Механические потери pмх состоят из потерь в подшипниках pподш, потерь на трение щеток о кольца pтр.щ (только для фазного ротора), вентиля-
220
5. Асинхронные машины
ционных потерь pвент, включающих в себя потери на трение частей машины о воздух и потери в крыльчатке вентилятора, установленной на валу машины:
рмх = рподш + рвент + ртр.щ . | (5.117) |
Механические потери зависят только от частоты вращения и составляют не более 2 % от номинальной мощности машины. Поскольку частота вращения асинхронного двигателя при изменении нагрузки от нуля до номинальной изменяется мало, то механические потери считают постоянными.
В отличие от трансформатора в асинхронном двигателе учитывают электрические потери холостого хода, поскольку ток холостого хода в нем существенно больше, чем в трансформаторе, и составляет от 20 до 50 % от номинального тока (причины такого значения I0 объяснены в п. 5.1):
р | эл0 | = m r I 2 . | (5.118) |
| 1 1 0 |
|
Таким образом, потери холостого хода
р0 = рмх + рмг + рэл0 . | (5.119) |
К потерям переменным (короткого замыкания) относят электрические потери в обмотках статора и ротора:
рэл1 = m1r1I12; рэл2 = m1r2′(I2′)2 . | (5.120) |
К переменным потерям относят и добавочные потери, вызванные различными причинами: неравномерностью зазора, технологическими погрешностями, вытеснением тока в проводниках обмотки, пульсациями магнитного потока и т. д. Обычно эти потери рассчитывают как определенный процент от номинальной мощности по формуле (5.73).
д. Обычно эти потери рассчитывают как определенный процент от номинальной мощности по формуле (5.73).
Итак, переменные потери, как следует из формул (5.120), (5.73), зависят от второй степени тока или второй степени коэффициента нагрузки kнг = I/Iн (отношения тока текущей нагрузки к номинальному его значению):
pк = pэл2 + pд = m1rк(I2′)2 +(I Iн )2 pд = kнг2 ркн, | (5.121) |
где pкн – потери короткого замыкания при номинальном токе.
Таким образом, суммарные потери мощности можно представить в следующем виде:
pΣ = p0 + pк = p0 + kнг2 pкн . | (5.122) |
221
5. Асинхронные машины
р,% |
| η,% |
| η |
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
| |
12 |
|
| 80 |
|
| ηmax |
| рΣ | |||
|
|
|
| ||||||||
8 |
|
| 60 |
|
|
| |||||
|
|
|
|
| рк | ||||||
6 |
|
| 40 |
|
|
|
|
| |||
|
|
|
|
|
|
| р0 |
| |||
4 |
|
|
|
|
|
|
|
| |||
|
| 20 |
|
|
|
|
|
| kнг | ||
|
|
|
|
|
|
| |||||
0 |
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
| |
| 0,2 | 0,4 | 0,6 | 0,8 | 1,0 |
|
| ||||
|
|
|
| ||||||||
|
|
|
|
| Iкр |
|
|
|
|
|
|
Рис.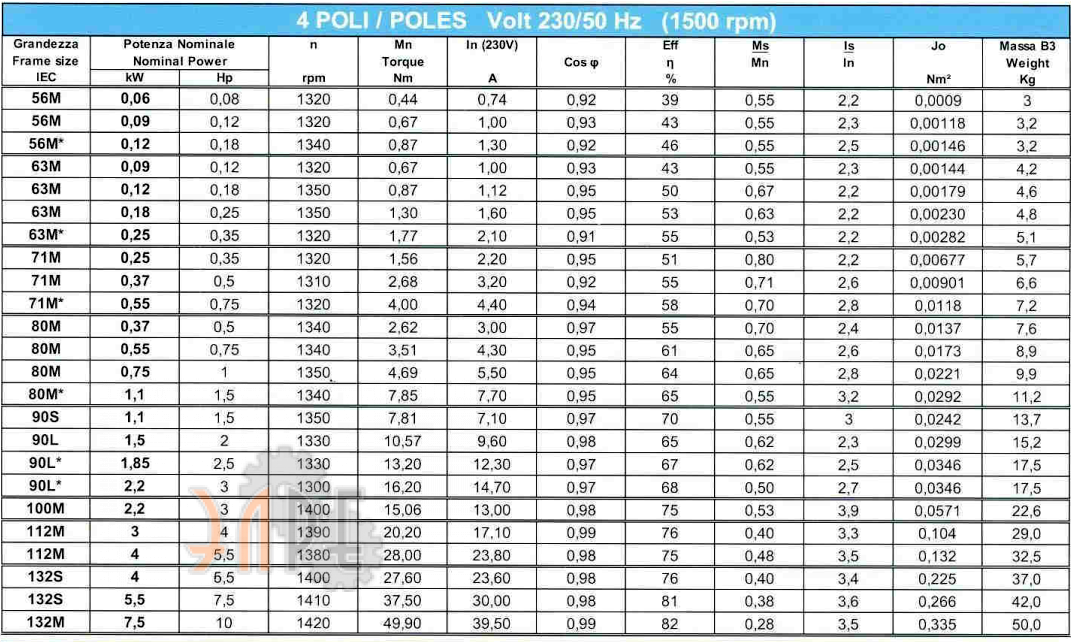 5.23. Зависимость КПД двигателя и его потерь от коэффициента нагрузки
5.23. Зависимость КПД двигателя и его потерь от коэффициента нагрузки
Формулу (5.115) запишем с учетом выражения (5.122):
|
|
| р | + k 2 | р |
|
|
|
|
η =1− |
|
| 0 | нг | кн |
|
| . | (5.123) |
k | нг | Р + р + k 2 | р |
| |||||
|
| 2 | 0 | нг |
| кн |
| ||
Характер зависимости КПД от коэффициента нагрузки такой же, как
иу трансформатора.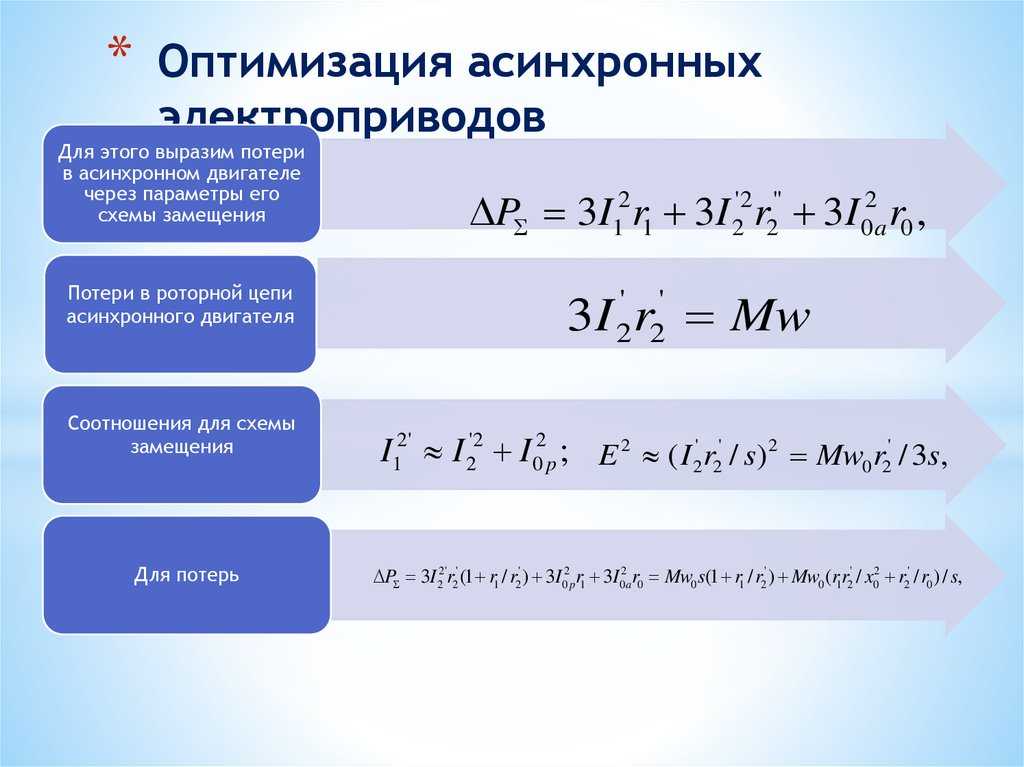 При увеличении нагрузки КПД возрастает за счет уве-
При увеличении нагрузки КПД возрастает за счет уве-
личения Р2, но одновременно быстрее, чем Р2, возрастают переменные потери рк, поэтому при некотором токе Iкр рост КПД прекращается и в дальнейшем начинает уменьшаться (рис. 5.23). Если исследовать функцию
(5.123) на экстремум (взять производную dη/dkнг и приравнять ее к нулю), то получим условие максимума КПД: он наступает при равенстве переменных
ипостоянных потерь рк = р0. При проектировании электрической машины стремятся так распределить потери мощности, чтобы указанное условие выполнялось при наиболее вероятной нагрузке машины, несколько мень-
шей номинальной. Во вращающихся электрических машинах средней и большой мощности это условие выполняется при нагрузках 60−80 % от номинальной (коэффициент нагрузки kнг = 0,6−0,8). На рис. 5.23 приведены зависимости изменения КПД и потерь мощности от коэффициента нагрузки.
Коэффициент мощности асинхронной машины определяют как отношение активного тока к полному току или активной потребляемой мощности к полной мощности по выражению
| I | P1 |
| P1 |
|
| |
cos ϕ = | 1а | = |
| = |
| . | (4.53) |
|
|
| |||||
1 | I1 | S |
| m1U1I1 |
|
| |
|
|
|
| ||||
222
|
|
|
|
|
|
|
|
| 5. Асинхронные машины | ||||
cosϕ |
|
|
|
|
| I2′ | cosψ2 |
|
| ||||
1,0 |
|
|
| cosϕ |
|
| |||||||
|
|
| 1,0 |
|
|
|
| I2′ | |||||
|
|
|
|
|
|
| |||||||
0,8 |
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
| ||
0,6 |
|
|
|
|
| 0,5 |
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
| |||
0,4 |
|
|
|
|
|
|
| I2′а | cosψ2 | ||||
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
| ||||||
0,2 |
|
|
|
|
|
|
|
| |||||
|
|
|
| kнг |
|
|
|
| s | ||||
|
|
|
|
|
|
|
| ||||||
0 |
|
|
|
|
|
|
|
|
|
| |||
|
|
|
| 0 |
|
|
|
| |||||
|
|
|
|
| 0,5 | 1,0 | |||||||
0,5 | 1,0 | ||||||||||||
| |||||||||||||
|
| Рис. |
|
|
| Рис. 5.25. Зависимости тока | |||||||
|
| коэффициента мощности |
|
|
| роторной обмотки и cosψ2 | |||||||
 5.24. Характеристика
5.24. Характеристикаот скольжения
Асинхронный двигатель, так же как и трансформатор, независимо от нагрузки потребляет из сети отстающий ток, поэтому его cos φ1 всегда меньше единицы.
При холостом ходе асинхронного двигателя коэффициент мощности мал и составляет cos φ0 = 0,08−0,15 (рис. 5.24). Это объясняется малой величиной активной составляющей тока, идущего на покрытие лишь достаточно небольших потерь активной мощности. В то же время реактивная составляющая тока холостого хода сравнительно велика, поскольку потребляется двигателем для создания основного магнитного потока, практически не зависящего от нагрузки. При увеличении нагрузки cos φ1 сначала довольно быстро растет при увеличении момента на валу, затем рост его замедляется и достигает максимума при мощности, близкой к номинальной (рис.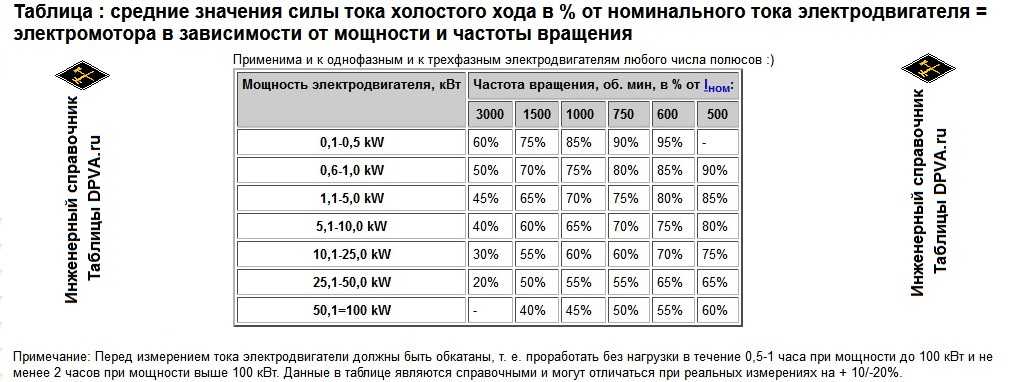 5.24). Но при увеличении момента уменьшается частота вращения и растет скольжение. При этом увеличивается частота тока в роторе f2 = f1s, его индуктивное сопротивление. Снижается и cos φ1, как правило, при нагрузках, выше номинальных.
5.24). Но при увеличении момента уменьшается частота вращения и растет скольжение. При этом увеличивается частота тока в роторе f2 = f1s, его индуктивное сопротивление. Снижается и cos φ1, как правило, при нагрузках, выше номинальных.
Вследствие массового использования асинхронных двигателей для рационального электроснабжения предприятий следует так организовывать технологический процесс, чтобы асинхронные двигатели были загружены в соответствии сихноминальной мощностью инеработали нахолостомходу.
Величина коэффициента мощности для двигателей с короткозамкнутым ротором мощностью до 100 кВт достигает 0,7−0,9, а для двигателей свыше 100 кВт cos φ1 = 0,9−0,95. В двигателях с фазным ротором cos φ1 и КПД несколько ниже, что объясняется дополнительными потерями на трение щеток, худшим использованием объема ротора из-за наличия изоляции в его пазах и увеличением намагничивающего тока в результате уменьшения сечения зубцов ротора.
223
Повышение коэффициента мощности асинхронного двигателя
Абдуллаев Хумоюн Фуркатович1, Абдуллаев Мухаммадсайфулло1
1Андижанский машиностроительный институт
Аннотация
В данной статье обсуждается разработка улучшения коэффициента мощности асинхронного двигателя с использованием естественных и искусственных способов. Индуктивные нагрузки всегда создают низкий коэффициент мощности из-за потребления большей реактивной мощности. Низкий коэффициент мощности не только является штрафом для потребителей, но и приводит к потерям энергии в электрических системах. Когда коэффициент мощности повышается, автоматически экономится энергия. Коэффициент мощности — это цель любой электроэнергетической компании, поскольку, если коэффициент мощности меньше единицы, они должны подавать больший ток пользователю для заданного количества потребляемой мощности.
Индуктивные нагрузки всегда создают низкий коэффициент мощности из-за потребления большей реактивной мощности. Низкий коэффициент мощности не только является штрафом для потребителей, но и приводит к потерям энергии в электрических системах. Когда коэффициент мощности повышается, автоматически экономится энергия. Коэффициент мощности — это цель любой электроэнергетической компании, поскольку, если коэффициент мощности меньше единицы, они должны подавать больший ток пользователю для заданного количества потребляемой мощности.
Ключевые слова: асинхронные двигатели, индуктивное, конденсатор, коэффициент мощности, резистивное, сетевое распределение мощности
Библиографическая ссылка на статью:
Абдуллаев Х.Ф., Абдуллаев М. Повышение коэффициента мощности асинхронного двигателя // Современные научные исследования и инновации. 2021. № 7 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2021/07/96390 (дата обращения: 22.12.2022).
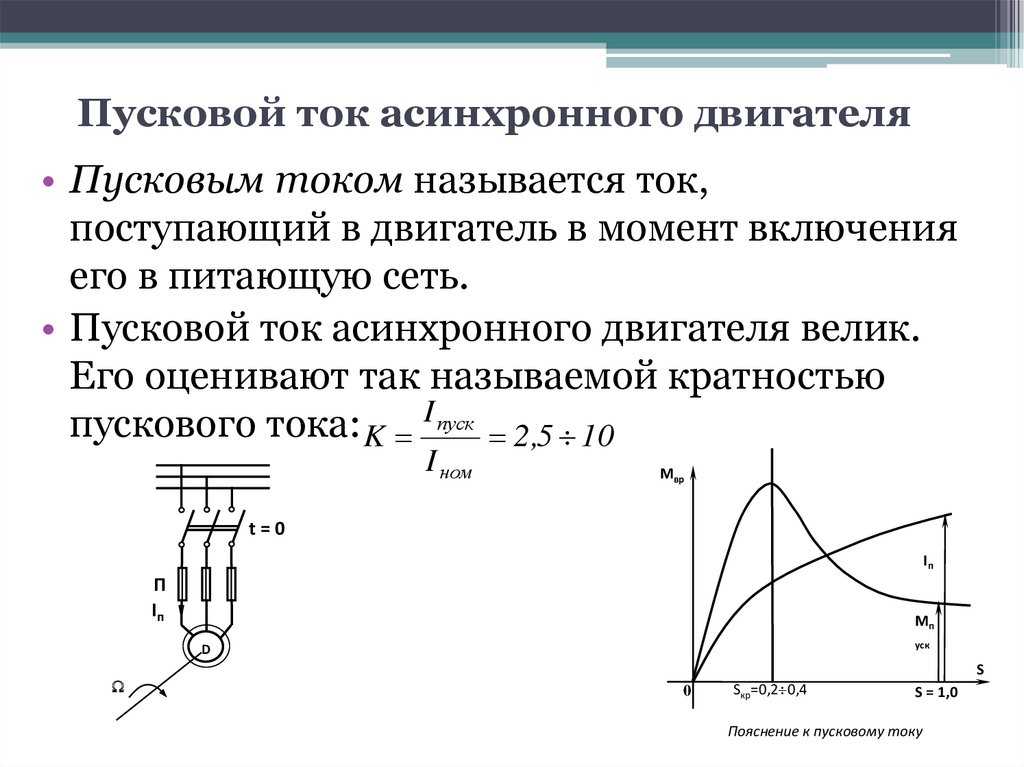
Асинхронные двигатели представляют для линии электропередач отстающий (индуктивный) коэффициент мощности. Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%. Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости. Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору). Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности. Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности [1].
Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%. Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости. Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору). Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности. Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности [1].
Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%. Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, потому что большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным. Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. Эффективность снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT. Изменение КПД в зависимости от нагрузки показано на рисунке выше. Индукционные двигатели обычно имеют завышенные размеры, чтобы гарантировать, что их механическая нагрузка может быть запущена и приведена в действие при любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД снижается лишь незначительно до 25% FLT[2].
КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%. Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, потому что большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным. Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. Эффективность снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT. Изменение КПД в зависимости от нагрузки показано на рисунке выше. Индукционные двигатели обычно имеют завышенные размеры, чтобы гарантировать, что их механическая нагрузка может быть запущена и приведена в действие при любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД снижается лишь незначительно до 25% FLT[2].
Батарею конденсаторов следует подключать непосредственно к клеммам двигателя.
После применения компенсации к двигателю ток в комбинации двигатель-конденсатор будет ниже, чем раньше, при тех же условиях нагрузки с приводом от двигателя. Это связано с тем, что значительная часть реактивной составляющей тока двигателя поступает от конденсатора, как показано на рисунке 1 .
Если устройства максимальной токовой защиты двигателя расположены перед подключением конденсатора двигателя (а это всегда будет иметь место для конденсаторов, подключенных к клеммам), уставки реле максимального тока должны быть уменьшены в соотношении для двигателей, компенсированных в соответствии со значениями квар, указанными на рисунке 1. (максимальные значения, рекомендуемые для предотвращения самовозбуждения стандартных асинхронных двигателей, как описано в разделе «Как избежать самовозбуждения асинхронного двигателя»), вышеупомянутое соотношение будет имеют значение, аналогичное значению, указанному для соответствующей скорости двигателя на Рисунке 1.
Рис. 1 — Перед компенсацией трансформатор выдает всю реактивную мощность; после компенсации конденсатор обеспечивает большую часть реактивной мощности
Основная цель этого исследования – разработать схему энергосбережения для промышленной распределительной сети. Это может быть достигнуто за счет уменьшения потерь в сети и улучшения работы основной электрической нагрузки до более высокого уровня эффективности. Разработанная схема направлена на повышение коэффициента мощности распределительной сети за счет добавления в сеть шунтирующих конденсаторов оптимального размера и расположения. В промышленных распределительных сетях наблюдается рост потерь мощности, а увеличение типа нагрузки сопровождается низким коэффициентом мощности, что приводит к огромной передаче реактивной мощности от энергосистемы через сеть [3].
Главный недостаток этой проблемы – увеличение потерь в сети и снижение уровня напряжения. Это может привести к снижению надежности, проблемам с безопасностью и более высоким затратам на электроэнергию. Чем ниже наш коэффициент мощности, тем менее экономично работает наша система. Фактическое количество мощности, используемой или рассеиваемой в цепи, называется истинной мощностью. Реактивные нагрузки, такие как катушки индуктивности и конденсаторы, составляют так называемую реактивную мощность. Линейная комбинация истинной мощности и реактивной мощности называется полной мощностью. Нагрузки энергосистемы состоят из резистивных, индуктивных и емкостных нагрузок.
Чем ниже наш коэффициент мощности, тем менее экономично работает наша система. Фактическое количество мощности, используемой или рассеиваемой в цепи, называется истинной мощностью. Реактивные нагрузки, такие как катушки индуктивности и конденсаторы, составляют так называемую реактивную мощность. Линейная комбинация истинной мощности и реактивной мощности называется полной мощностью. Нагрузки энергосистемы состоят из резистивных, индуктивных и емкостных нагрузок.
В цепях переменного тока обычно существует разность фаз между напряжением и током. Этот термин известен как коэффициент мощности схемы. Если цепь индуктивна, ток отстает от напряжения, а коэффициент мощности называется отставшим коэффициентом мощности, а если цепь емкостная, то ток приводит к напряжению, а коэффициент мощности считается ведущим коэффициентом мощности. Средняя мощность в цепи переменного тока выражается через среднеквадратичное значение тока и напряжения [4].
Средняя мощность в цепи переменного тока выражается через среднеквадратичное значение тока и напряжения.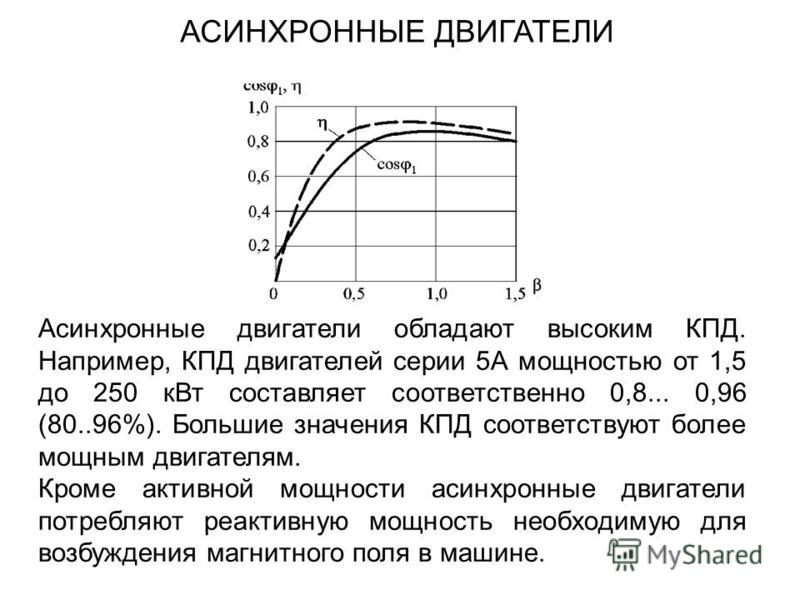
Чисто резистивная нагрузка (лампы накаливания, электрические нагревательные элементы) будет иметь коэффициент мощности 1,0 (единица).
Рис. 2. Треугольник коэффициента мощности по мощности
Коэффициент мощности асинхронных двигателей – один из важных элементов, который необходимо поддерживать равным единице. Коэффициент мощности изменяется, когда нагрузка двигателя изменяется с холостого хода на полную / перегрузку. Это изменение вызвало мониторинг и определение низкого коэффициента мощности при любых условиях нагрузки становится важным из-за поиска оптимальной реактивной мощности для компенсации коэффициента мощности.
Библиографический список
- Fuchs EF (2008) Качество электроэнергии в энергосистемах и электрических машинах. Academic Press, Кембридж
- Chapman S (2004) Основы электрического машиностроения. McGraw -Hill Education, Нью-Йорк.
- Orsag P (2014) Влияние качества электросети на рабочие характеристики асинхронного двигателя.
 В: 14-я международная конференция по окружающей среде и электротехнике (EEEIC), 10–12 мая 2014 г., Острава, Чешская Республика.
В: 14-я международная конференция по окружающей среде и электротехнике (EEEIC), 10–12 мая 2014 г., Острава, Чешская Республика. - Захир Дж. (2009) Оценка коэффициента мощности путем анализа данных о качестве электроэнергии для несимметрии напряжения . В: ICEE, Мелборн
- Кумар С.П. , Саббервал С.П., Мухарджи А.К. (1994) Методы измерения и коррекции коэффициента мощности. Electric Power Syst Res 32: 141–143
- М. Ходапанах1 · А.Ф. Зобаа1 · М. Аббод. Оценка коэффициента мощности асинхронных двигателей при любых условиях нагрузки с использованием опорной векторной регрессии (SVR).
- Студент M.Tech , * 2 доц. Профессор и электроцеха и UIET, Курукшетра Universtiy Power Factor Улучшение асинхронного двигателя с помощью конденсаторов
 В: 14-я международная конференция по окружающей среде и электротехнике (EEEIC), 10–12 мая 2014 г., Острава, Чешская Республика.
В: 14-я международная конференция по окружающей среде и электротехнике (EEEIC), 10–12 мая 2014 г., Острава, Чешская Республика.Количество просмотров публикации: Please wait
Все статьи автора «Режабов Зайлобиддин Маматович»
Часто задаваемые вопросы — Schneider Electric
{"searchBar":{"inputPlaceholder":"Поиск по ключевому слову или задать вопрос","searchBtn":"Поиск","error":"Пожалуйста, введите ключевое слово для поиска"} }  0.0.0″> В чем разница между продуктами RCBO и RCCB Acti 9?
0.0.0″> В чем разница между продуктами RCBO и RCCB Acti 9?
— ВДТ: это устройство из линейки Acti 9, используемое для полной защиты (защита от перегрузки + защита от короткого замыкания + защита от утечки на землю с различной чувствительностью) — ВДТ: это устройство…
В чем разница между логикой SR2 и SR3?
SR2 — это компактная линейка Zelio Logic, в которую нельзя добавлять модули расширения ввода-вывода или коммуникационные модули. В то время как SR3 — это модульная серия, в которую можно добавлять модули расширения ввода-вывода и…
Каково значение выдерживаемого напряжения промышленной частоты в течение одной минуты для NSX.
 ..
..
Модельный ряд Compact NSX имеет Uimp 8 кВ. В соответствии со стандартом IEC-60947-1 / 60947-2, на выключателе проводятся испытания импульсной волной 1,2/50 мкс и выдерживаемым напряжением промышленной частоты. Для промышленной частоты…
Электродвигатель 415 В, класс изоляции F, мощность dv/dt 1 кВ/ мкСм, может может…
Обычно двигатель с изоляцией класса F считается двигателем с частотно-регулируемым приводом, но указано, что выдерживаемая способность dV/dT составляет 1 кВ/мкс. Следовательно, мы не можем рассматривать этот двигатель как класс частотно-регулируемого привода…
Часто задаваемые вопросы о популярных видеоПопулярные видео для настройки функций режимов работы в Ecodial…
Видео: Как установить/заменить расцепитель на/с…
Узнайте больше в разделе часто задаваемых вопросов по общим знаниямОбщие знания
Как сбросить пароль логики Zelio ?
Пароль можно сбросить, очистив программу внутри Zelio либо путем переноса новой программы на Zelio, либо очистив уже существующую программу путем обновления прошивки Пожалуйста, найдите…
Что понимают под симметричным и асимметричным током отключения?
Проблема: Заказчик хочет знать значение симметричного и несимметричного тока отключения автоматического выключателя и что они означают. Окружающая среда: Автоматический выключатель Разрешение: — Симметричное…
Окружающая среда: Автоматический выключатель Разрешение: — Симметричное…
Почему некоторые продукты имеют двойной код с двумя классами защиты IP (например, IP65) / IP67)?
Вторая характеристическая цифра в обозначении IP указывает на степень защиты, обеспечиваемую корпусом, от вредного воздействия на оборудование из-за попадания воды. 5 =>…
Можно ли установить шунтирующий контактор для технологических приводов Altivar?
Байпасные контакторы не поддерживаются приводами ATV process LV (ATV600, ATV900). Шунтирование привода внешними контакторами невозможно, так как нет синхронизации выходного напряжения с. ..
..
Как коэффициент мощности и асинхронные двигатели могут повлиять на прибыль
Уильям Ливоти
14.04.2016
Что такое коэффициент мощности и как он влияет на прибыль? Всем, у кого на заводах установлены большие асинхронные двигатели, или тем, кто получал компенсацию за корректировку коэффициента мощности от своих электроэнергетических компаний, следует внимательно прочитать эту статью.
Институт инженеров по электротехнике и электронике и Международная электротехническая комиссия определяют коэффициент мощности как отношение между приложенной активной (действительной) мощностью и полной мощностью (см. уравнение 1).
Цепи, содержащие чисто резистивные нагревательные элементы, такие как ленточные нагреватели и электрические плиты, имеют коэффициент мощности 1,0 (единичный коэффициент мощности).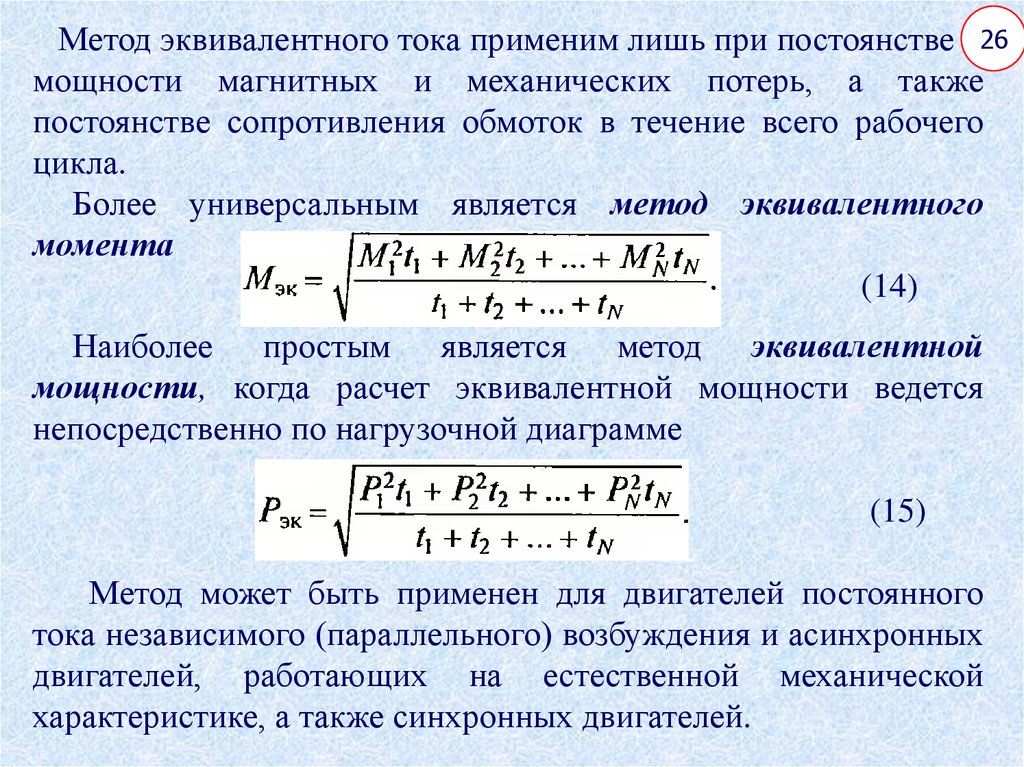 Цепи, содержащие индуктивные или емкостные элементы, такие как асинхронные двигатели, имеют коэффициент мощности ниже 1,0. Коэффициент мощности асинхронного двигателя определяется в первую очередь конструкционным материалом. Материал с более высокой проницаемостью приводит к лучшей производительности двигателя, более низкому току и более высокому коэффициенту мощности, поэтому статор двигателя содержит большую часть этого материала. Коэффициент мощности варьируется от одного производителя двигателя к другому из-за различных конструкционных материалов.
Цепи, содержащие индуктивные или емкостные элементы, такие как асинхронные двигатели, имеют коэффициент мощности ниже 1,0. Коэффициент мощности асинхронного двигателя определяется в первую очередь конструкционным материалом. Материал с более высокой проницаемостью приводит к лучшей производительности двигателя, более низкому току и более высокому коэффициенту мощности, поэтому статор двигателя содержит большую часть этого материала. Коэффициент мощности варьируется от одного производителя двигателя к другому из-за различных конструкционных материалов.
Рис. 1. На графике показано, как рассчитывается коэффициент мощности. кВт или реальная мощность — это то, что получает пользователь. КВАр, или реактивная мощность, представляет собой дополнительную мощность, передаваемую для компенсации коэффициента мощности менее 1,0. Их комбинация называется полной мощностью (кВА или вольт-ампер). (Графика предоставлена WEG Electric)
Помимо платы за коррекцию коэффициента мощности, существуют текущие расходы на коэффициент мощности меньше единицы из-за проницаемости материалов.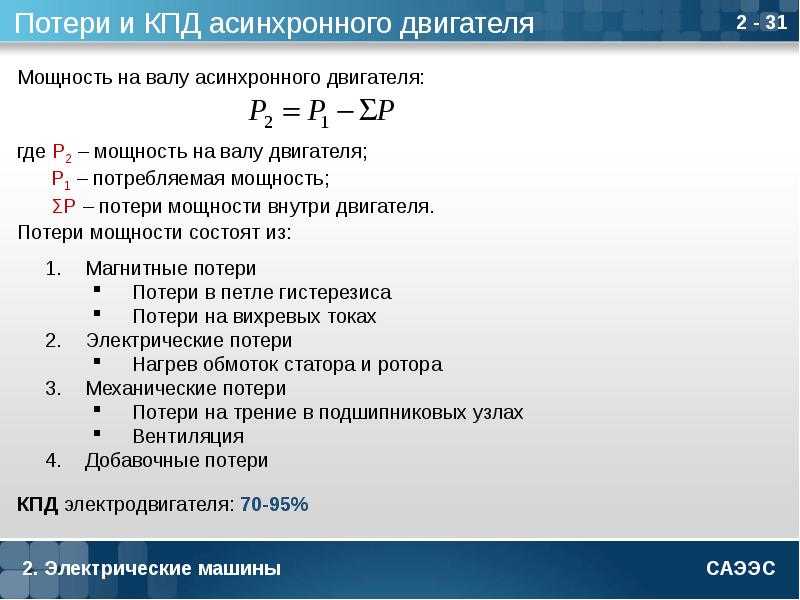 Кто-то может назвать это даром, который продолжает дарить. Низкий/плохой коэффициент мощности продолжает влиять на итоговую прибыль предприятия (месяц за месяцем), как указано в уравнениях 3 и 4. Неспособность скорректировать коэффициент мощности почти до единицы может обойтись очень дорого.
Кто-то может назвать это даром, который продолжает дарить. Низкий/плохой коэффициент мощности продолжает влиять на итоговую прибыль предприятия (месяц за месяцем), как указано в уравнениях 3 и 4. Неспособность скорректировать коэффициент мощности почти до единицы может обойтись очень дорого.
Пользователям также необходимо учитывать нагрузку двигателя. В отличие от КПД двигателя, коэффициент мощности падает гораздо быстрее, чем КПД, когда двигатель работает при пониженной нагрузке, как показано на рис. 2.
Рис. 2. При пониженной нагрузке коэффициент мощности падает намного быстрее, чем КПД.
Обратите внимание, как коэффициент мощности (зеленая линия) начинает падать при нагрузке около 80 процентов. Уравнение 2 показывает стоимость коэффициента мощности асинхронного двигателя. Его можно использовать для расчета годовых затрат на электроэнергию.
При выполнении расчетов используйте коэффициент мощности, указанный на паспортной табличке, как показано в уравнении 3. В уравнении используются измеренный ток (340) и измеренное напряжение (460), при этом 1,732 — это квадратный корень из трех, 0,85 — мощность, указанная на паспортной табличке. фактор, 4160 — это часы работы, а 0,07 доллара США — это стоимость киловатта (кВт). Выполняя тот же расчет с использованием скорректированного коэффициента мощности 0,75 на основе технических данных двигателя, уравнение 4 показывает использование фактического коэффициента мощности. Экономию можно рассчитать, вычитая уравнение 4 из уравнения 3. Экономия с коррекцией коэффициента мощности (единица) составляет 7 888 долларов США в год.
В уравнении используются измеренный ток (340) и измеренное напряжение (460), при этом 1,732 — это квадратный корень из трех, 0,85 — мощность, указанная на паспортной табличке. фактор, 4160 — это часы работы, а 0,07 доллара США — это стоимость киловатта (кВт). Выполняя тот же расчет с использованием скорректированного коэффициента мощности 0,75 на основе технических данных двигателя, уравнение 4 показывает использование фактического коэффициента мощности. Экономию можно рассчитать, вычитая уравнение 4 из уравнения 3. Экономия с коррекцией коэффициента мощности (единица) составляет 7 888 долларов США в год.
Преимущества корректировки коэффициента мощности включают:
- Электрическая нагрузка на коммунальное предприятие снижается, что позволяет коммунальному предприятию поставлять избыточную мощность другим потребителям без увеличения генерирующей мощности.
- Большинство коммунальных предприятий налагают штрафы за низкий коэффициент мощности, которые могут быть значительными. Скорректировав коэффициент мощности, этого штрафа можно избежать.
- Высокий коэффициент мощности снижает токи нагрузки, поэтому достигается значительная экономия на аппаратных средствах.
 Скорректировав коэффициент мощности, этого штрафа можно избежать.
Скорректировав коэффициент мощности, этого штрафа можно избежать.Существует несколько способов решения проблемы коэффициента мощности, включая частотно-регулируемые приводы (применительно к конкретному оборудованию), статические компенсаторы реактивной мощности (вольтамперно-реактивные) и динамические компенсаторы реактивной мощности (также известные как синхронные конденсаторы).
Какой метод использовать, следует оценивать на основе совокупной стоимости владения. Например, частотно-регулируемые приводы рентабельны только при определенных условиях эксплуатации. Статические компенсаторы требуют регулярного обслуживания и должны быть рассчитаны на конкретную единицу оборудования. Размер синхронных конденсаторов может соответствовать требованиям предприятия, но за это приходится платить.
Коэффициент мощности меньше единицы может стоить компании тысячи долларов.