Реверсирование двигателя постоянного тока — ООО «СЗЭМО Электродвигатель»
14.01.2023
USD = 67.5744
EUR = 73.1131
KZT = 14.6082
ООО «СЗЭМО «Инжиниринг»
ООО «СЗЭМО «Электродвигатель» ООО «СЗЭМО «Завод Электромашина»
e-mail: spb@szemospb.ru
Вход
ООО «СЗЭМО «Инжиниринг»
ООО «СЗЭМО «Электродвигатель»
ООО «СЗЭМО «Завод Электромашина»
+7 (812) 321-79-43
Выберите регион:
8 (800) 550 00 93
Звонок по России бесплатный
Заказать звонок
ООО «СЗЭМО «Инжиниринг»
ООО «СЗЭМО «Электродвигатель»
ООО «СЗЭМО «Завод Электромашина»
Закрыть
Часто для выполнения определенной задачи требуется осуществить реверсирование двигателя постоянного тока. Термин «реверсирование» обозначает изменение направления вращения мотора агрегата. Добиться этого можно, изменив направление действия вращающего момента. Направление магнитного потока электродвигателя постоянного тока изменяется двумя способами:
Термин «реверсирование» обозначает изменение направления вращения мотора агрегата. Добиться этого можно, изменив направление действия вращающего момента. Направление магнитного потока электродвигателя постоянного тока изменяется двумя способами:
- переключением обмотки возбуждения;
- переключением якоря.
В обоих случаях направление тока в якоре станет противоположным. Если переключить и якорь, и цепь направления, направление вращения магнитного поля не изменится.
Поскольку постоянная времени обмотки якоря достаточно мала, переключение якоря значительно ускоряет процесс реверсирования. Когда нет необходимости быстродействия, обычно прибегают к переключению цепи возбуждения. В моделях двигателей параллельного возбуждения в обмотке имеется большой запас энергии, поэтому в машинах с большими мощностями постоянная времени обмотки равна буквально нескольким секундам.
В моделях последовательного возбуждения реверс производится аналогично. В обмотках якоря и возбуждения имеется небольшой запас энергии, вследствие чего постоянные времени обоих узлов относительно малы.
В обмотках якоря и возбуждения имеется небольшой запас энергии, вследствие чего постоянные времени обоих узлов относительно малы.
Процесс реверсирования двигателя постоянного тока
Реверс двигателя постоянного тока с параллельным возбуждением выглядит следующим образом:
- Якорь отключается от источника питания.
- Двигатель переключается для торможения или тормозится механически.
- Якорь переключается либо в процессе торможения, либо после полного окончания торможения.
- Осуществляется пуск механизма, и двигатель начинает вращаться в противоположном направлении.
Реверсирование модели с последовательным возбуждением выполняется в той же последовательности. У моделей со смешанным возбуждением переключается или якорь, или параллельная и последовательная обмотки вместе.
Пуск и торможение двигателя постоянного тока
Способ пуска двигателя постоянного тока зависит от его мощности. Прямое включение допускается только для агрегатов малой мощности. Во всех остальных случаях используется пусковой реостат, ограничивающий ток до допустимых значений.
Прямое включение допускается только для агрегатов малой мощности. Во всех остальных случаях используется пусковой реостат, ограничивающий ток до допустимых значений.
Пусковой реостат представляет собой разделенную на секции ленту (или провод) с высоким удельным сопротивлением. В местах перехода установлены медные плоские или кнопочные контакты, к которым присоединяются провода. При пуске двигателя сопротивление реостата должно последовательно уменьшаться – для этого рычаг переводится с одного неподвижного контакта на другой и секции выключаются.
Существует два способа торможения двигателей постоянного тока:
- Механическое торможение, применяемое при отсутствии ограничений времени и тормозного пути. При его выполнении тормозные колодки накладываются на тормозной шкив.
- Электрическое торможение, обеспечивающее точный тормозящий момент. Поскольку фиксация механизма в нужном месте невозможна, часто оно дополняется механическим.
В свою очередь, электрическое торможение может осуществляться тремя путями:
- С возвратом энергии в сеть.
 Кинетическая энергия при этом преобразовывается в электрическую, часть которой возвращается в сеть.
Кинетическая энергия при этом преобразовывается в электрическую, часть которой возвращается в сеть. - При противовключении. Вращающийся двигатель переключается на противоположное направление вращения.
- Динамическое. При этом происходит рассеивание электрической энергии в цепи якоря.
 Кинетическая энергия при этом преобразовывается в электрическую, часть которой возвращается в сеть.
Кинетическая энергия при этом преобразовывается в электрическую, часть которой возвращается в сеть.Пуск, торможение и реверс двигателя постоянного тока должны выполняться с соблюдением технологических требований и правил техники безопасности.
Схема смены направления вращения двигателя постоянного тока
Лучшие смартфоны на Android в 2022 году
Серия iPhone от Apple редко чем удивляет. Когда вы получаете новый iPhone, общее впечатление, скорее всего, будет очень похожим на ваше предыдущее устройство. Однако всё совсем не так в лагере владельцев устройств на Android. Существуют телефоны Android всех форм и размеров, не говоря уже о разных ценовых категориях. Другими словами, Android-телефон может подойти многим. Однако поиск лучших телефонов на Android может быть сложной задачей.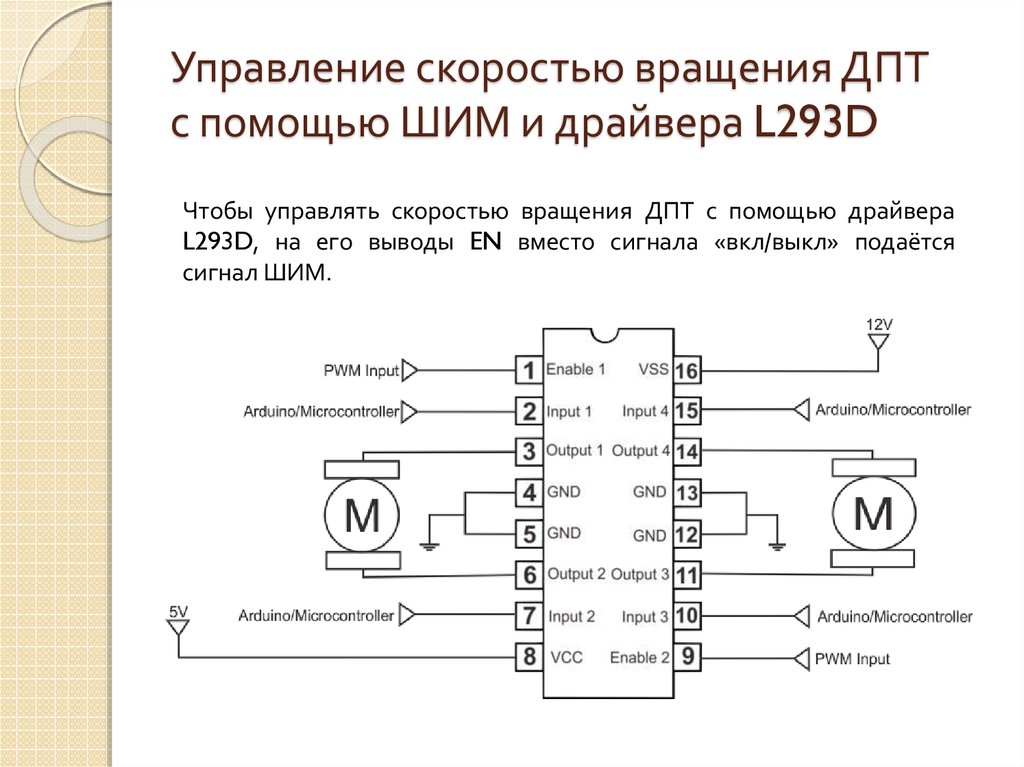
1110 0
|
Конструирование
Математика
- Главная
- Статьи
- Конструирование
/
/
Схема смены направления вращения двигателя постоянного тока с кнопочным выключателем без фиксации. С помощью реле осуществляются функции вращения в прямом и обратном направлениях, а также останов двигателя. Вращение двигателя нельзя поменять на противоположное до тех пор, пока предварительно не будет нажата кнопка останова.
Примечания:
На первый взгляд схема может показаться чрезмерно усложнённой, однако это связано лишь с тем, что здесь используются три кнопочных выключателя без фиксации. Когда нажата и затем отпущена кнопка движения в прямом направлении, двигатель вращается постоянно в одном направлении. Прежде чем нажимать кнопку вращения в обратном направлении необходимо задействовать кнопку останова. При нажатии на кнопку вращения в обратном направлении двигатель будет вращаться постоянно в обратном направлении до тех пор, пока не будет нажата кнопка останова. Переключение вращения двигателя на противоположное без останова чрезвычайно опасно, поскольку при вращении двигателя вырабатывается противо-ЭДС, которая может привести к образованию дугового разряда на контактных группах реле. В схеме реализована встроенная защитная функция для предотвращения такой ситуации.
Когда нажата и затем отпущена кнопка движения в прямом направлении, двигатель вращается постоянно в одном направлении. Прежде чем нажимать кнопку вращения в обратном направлении необходимо задействовать кнопку останова. При нажатии на кнопку вращения в обратном направлении двигатель будет вращаться постоянно в обратном направлении до тех пор, пока не будет нажата кнопка останова. Переключение вращения двигателя на противоположное без останова чрезвычайно опасно, поскольку при вращении двигателя вырабатывается противо-ЭДС, которая может привести к образованию дугового разряда на контактных группах реле. В схеме реализована встроенная защитная функция для предотвращения такой ситуации.
Работа схемы:
Представим, что двигатель не работает и все реле обесточены. Когда нажата кнопка вращения в прямом направлении катушка реле RA/2 соединена с цепью положительного вывода батареи через контактную группу NC B1. Схема будет работать так как цепь полностью замкнута через контакты NC D1.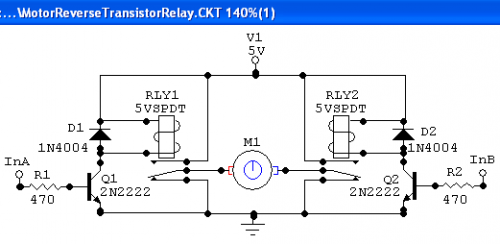 Реле RA/2 будет работать. Контакты A1 будут обеспечивать работу реле даже после того, как кнопка отпущена. Через контакты A2 ток поступает на двигатель, который будет вращаться в одном направлении. Если в этот момент нажать кнопку обратного вращения, то ничего не произойдёт, потому что положительное питание выключателя проходит через нормально замкнутый контакт A1, который в настоящий момент разомкнут, поскольку реле RA/2 обесточено. Для того чтобы остановить двигатель необходимо нажать кнопку останова. В работу включается реле D и его контакты D1 обрывают цепь, по которой ток поступает на реле А и В (в рассматриваемой ситуации работает только реле А). Если теперь нажать на кнопку вращения в обратном направлении, а затем отпустить её, то в работу включится реле В, через нормально замкнутый контакт А1 и нормально замкнутый контакт D1. Контакт В1 замыкается и состояние реле будет зафиксировано, даже после того как кнопка отпущена. На реле RC/2 также будет подано напряжение и его состояние будет зафиксировано.
Реле RA/2 будет работать. Контакты A1 будут обеспечивать работу реле даже после того, как кнопка отпущена. Через контакты A2 ток поступает на двигатель, который будет вращаться в одном направлении. Если в этот момент нажать кнопку обратного вращения, то ничего не произойдёт, потому что положительное питание выключателя проходит через нормально замкнутый контакт A1, который в настоящий момент разомкнут, поскольку реле RA/2 обесточено. Для того чтобы остановить двигатель необходимо нажать кнопку останова. В работу включается реле D и его контакты D1 обрывают цепь, по которой ток поступает на реле А и В (в рассматриваемой ситуации работает только реле А). Если теперь нажать на кнопку вращения в обратном направлении, а затем отпустить её, то в работу включится реле В, через нормально замкнутый контакт А1 и нормально замкнутый контакт D1. Контакт В1 замыкается и состояние реле будет зафиксировано, даже после того как кнопка отпущена. На реле RC/2 также будет подано напряжение и его состояние будет зафиксировано. Через контакты В2 ток теперь будет поступать на двигатель, но поскольку контакты С1 и С2 переведены в другое положение, двигатель будет вращаться в противоположном направлении. При нажатии на кнопку вращения в прямом направлении ничего не произойдёт, поскольку подача тока на выключатель прервана через разомкнутый в настоящий момент контакт В1. Если теперь нажать на клавишу останова, то ток будет поступать на реле D, его контакты D1 разомкнут цепь подачи тока на реле В, которое в свою очередь обесточит реле С через нормально разомкнутый контакт В1, и, естественно, двигатель остановится. Всё не так уж сложно. Конденсатор на реле В необходим для того, чтобы гарантировать, что робота реле D будет осуществляться в течение времени, по крайней мере, большего, чем время, необходимое для повторного запуска реле А, В и С.
Через контакты В2 ток теперь будет поступать на двигатель, но поскольку контакты С1 и С2 переведены в другое положение, двигатель будет вращаться в противоположном направлении. При нажатии на кнопку вращения в прямом направлении ничего не произойдёт, поскольку подача тока на выключатель прервана через разомкнутый в настоящий момент контакт В1. Если теперь нажать на клавишу останова, то ток будет поступать на реле D, его контакты D1 разомкнут цепь подачи тока на реле В, которое в свою очередь обесточит реле С через нормально разомкнутый контакт В1, и, естественно, двигатель остановится. Всё не так уж сложно. Конденсатор на реле В необходим для того, чтобы гарантировать, что робота реле D будет осуществляться в течение времени, по крайней мере, большего, чем время, необходимое для повторного запуска реле А, В и С.
Нравится
Твитнуть
Теги Конструирование
Сюжеты Конструирование
Тактические фонари и профессиональная светотехника.
Тактические и профессиональные фонари. В первую очередь, это светотехнические средства, пригодные для применения в экстремальных и сложных условиях, а так же техника, оптимизированная для узкого спектра задач, например подствольные фонари или фонари для дайвинга.
В первую очередь, это светотехнические средства, пригодные для применения в экстремальных и сложных условиях, а так же техника, оптимизированная для узкого спектра задач, например подствольные фонари или фонари для дайвинга.
14828 0
Активная распределенная антенная система
Активная распределенная антенная система представляет собой двунаправленный репитер, который усиливает и дублирует выходной сотовый сигнал внутри одного помещения. Усиленный сигнал дублируется с помощью внутренней антенны. Подобным образом дублируется сотовый сигнал и за пределами здания.
6811 0
Интегратор
Для схемы данного интегратора подойдёт практически любая модель операционного усилителя, но в списке необходимых компонентов указана модель 1458, так как входные токи смещения этого ОУ гораздо выше. Как правило, высокий входной ток смещения считается плохой стороной того или иного операционного усилителя, если он используется в схеме усилителя постоянного тока (и особенно в схеме интегратора!).
8379 0
Комментарии (0)
Вы должны авторизоваться, чтобы оставлять комментарии.
Вход
Как перестать управлять двигателем постоянного тока: поменяйтесь ролями! | Саймон БДЙ | luos
ЧАСТЬ 1 — Управление направлением
Этот пост посвящается всем, кто интересуется основами двигателей постоянного тока в робототехнике и тем, как именно ими управлять. Вы можете начать с предыдущего поста, посвященного различным типам двигателей, используемых в роботизированных приложениях. Хотя некоторые из них используются нечасто, некоторые другие, такие как коллекторный двигатель постоянного тока, более распространены.
Имейте в виду, что в этом посте слово двигатель на самом деле будет сокращением от коллекторный двигатель постоянного тока .
Сегодня я расскажу вам об основах управления двигателем.
Одной из главных особенностей этих двигателей является простота использования: если вы подключите каждый провод батареи к клеммам двигателя, он, скорее всего, повернется в одну сторону. Если вы перепутаете провода, он повернется в другую сторону.
Если вы перепутаете провода, он повернется в другую сторону.
(Конечно, это немного сложнее, так как аккумулятор не должен быть слишком мощным для двигателя. В противном случае двигатель может быть поврежден.)
Но вот в чем проблема: он просто поворачивается. Нет контроля скорости. Нет управления направлением, если только вы вручную не перепутаете провода. В этот момент ваш мотор немного дерзок. Это болезненно, если вы хотите построить робота-марсохода для земли Венеры ( Марс — это 2017 )…
Теперь, если мы поговорим о приоритетах, мы обнаружим, что контроль направления предшествует контролю скорости. Почему? По сути, потому что вы бы предпочли ровер, который слишком быстро катится с резкими поворотами, чем ровер, который плавно движется только в одном направлении и не может поворачивать. Да, вы поняли.
Итак, давайте на время отложим управление скоростью и сосредоточимся на управлении направлением.
Управление направлением
Как я уже говорил ранее, если вы подключите положительный провод вашей батареи к одной из клемм двигателя, а отрицательный провод к другой клемме двигателя, двигатель будет вращаться в одном направлении. Если вы переключаете провода, он вращается в другом направлении. На следующих изображениях U — батареи, а M — двигатели.
Если вы переключаете провода, он вращается в другом направлении. На следующих изображениях U — батареи, а M — двигатели.
U1 и U2 перевернуты вверх ногами, меняя полярность. М1 вращается в одном направлении, М2 в другом.
Чтобы сделать его более автоматическим, мы могли бы разработать небольшую схему с механическим переключателем (S). Переключение выключателя ( да вот как это работает ) меняет полярность, а значит и направление вращения:
Все эти провода…
В этот момент этот нахальный мотор уже не управляет вами, но вы еще далеки от полного контроль на вашей стороне.
Вы все еще находитесь в ручном режиме. Ваша рука вместе с пальцами должна нажать тумблер, чтобы изменить направление. И, пожалуйста, не создавайте роботизированную руку, которая делает это вместо вашей руки.
Чтобы не использовать вашу руку, я хочу познакомить вас с Н-мосты . Н-мосты
— это простые электронные схемы (фактически они имеют размер микросхемы, но их легко собрать из дискретных компонентов). Они позволяют подавать напряжение в одном направлении или в другом, открывая и закрывая 4 двери.
Они позволяют подавать напряжение в одном направлении или в другом, открывая и закрывая 4 двери.
В приведенном ниже примере двигатель (M4) расположен в центре горизонтального стержня H.
Смотрите! Это птица? Это самолет? Нет, это Х!
Только две конфигурации могут заставить двигатель вращаться в одном или другом направлении:
Конфигурация 1: S2 и S5 замкнуты, S3 и S4 разомкнуты
Конфигурация 2: S2 и S5 разомкнуты, S3 и S4 замкнуты то есть без контакта.
Хорошо, это слишком много схематических изображений. Не знаю, как вас, а меня это очень утомляет, поэтому, пожалуйста, расслабьтесь.
Есть. Сделайте глубокий вдох.
Вернемся к управлению.
Любая другая конфигурация «двери» приведет либо к тому, что ничего не произойдет, либо к короткому замыканию на блоке питания ( , что плохо ), либо при торможении двигателя.
Примечание: торможение (или короткое торможение) двигателя заключается в соединении обеих его клемм вместе.
 Он работает только при движении ротора, что приводит к кратковременной остановке. Но вы можете легко попробовать это дома с отключенным двигателем: поверните ось рукой, затем сделайте это снова, соединив клеммы вместе; вы почувствуете, что ротору стало немного труднее вращаться.
Он работает только при движении ротора, что приводит к кратковременной остановке. Но вы можете легко попробовать это дома с отключенным двигателем: поверните ось рукой, затем сделайте это снова, соединив клеммы вместе; вы почувствуете, что ротору стало немного труднее вращаться.— Ок , ты мне говоришь, но то, что вы называете «дверями», для меня очень похоже на кнопки. Это значит, что мне снова понадобятся мои руки, и на этот раз их две!
Верно, это был самый простой способ объяснить это. Эти двери можно заменить несколькими компонентами, называемыми транзисторами или MOFSET. Наиболее часто используется биполярный транзистор . Этот трехногий компонент возьмет на себя роль автоматической двери; это означает, что подключенная к микропроцессору, который посылает команды, каждая дверь автоматически пропускает через себя определенное количество тока или блокирует его. В результате получается дверь или кнопка, не требующая рук.
Транзистор NPN (условное обозначение и рисунок). C означает коллектор, E — эмиттер и B — основание.
Этот тип транзистора работает как управляемая дверь: сторона B — это сторона управления, откуда вы выбираете, открывать или закрывать ее. Если небольшой «сигнальный» ток течет через В к Е, то дверь открывается и позволяет большему «мощному» току течь от С к Е. Если ток от В к Е не течет, то дверь закрыта и нет ток допускается от C и E.
Примечание: Это объяснение для случая полностью насыщенного транзистора. Реальность может быть немного сложнее.
Также вы можете найти PNP (это был NPN), который в основном представляет собой противоположную полярность.
Многие электронные платы управления (например, L298N) имеют в своей конструкции один или несколько чипов Н-моста. Используемый вами микропроцессор (например, на плате Arduino ) подключается к входным контактам платы управления. Затем высокие и низкие сигналы от микропроцессора будут командовать микросхемой H-моста, чтобы заставить двигатель вращаться так, как вы хотите.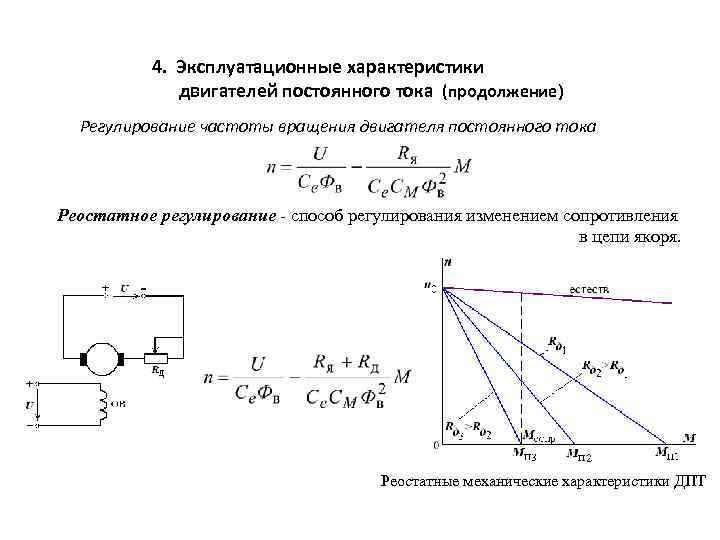
Подводя итог:
- Вы пишете программу на микропроцессоре (проще с помощью проявочной платы).
- Микропроцессор посылает сигналы высокого или низкого уровня на H-мост (опять же, проще с платой управления).
- H-мост ориентирует напряжение так, чтобы подключенный двигатель мог вращаться так, как вы вежливо попросили.
Это изображение неполное, так как показаны только сигналов направления . Мы дополним его сигналами скорости позже.
Конечно, вам придется запрограммировать вашу проявочную доску, чтобы она работала должным образом. Многие веб-сайты отлично помогают справиться с Платы Arduino или Raspberry Pi .
Примечание. H-мосты используются для других функций, например, для преобразователей постоянного тока в переменный. Также шаговые двигатели управляются H-мостами, но это немного сложнее.
Поздравляю. Несмотря на то, что некоторые картинки сложно смотреть слишком долго, теперь у вас есть половина контроля над вашим мотором. В следующей части мы рассмотрим регулятор скорости , все еще на коллекторных двигателях постоянного тока. Еще один шаг к полному контролю!
В следующей части мы рассмотрим регулятор скорости , все еще на коллекторных двигателях постоянного тока. Еще один шаг к полному контролю!
Спасибо, что прочитали.
— Если вам понравилось то, что вы прочитали, пожалуйста, хлопайте в ладоши и следите за нами на Medium!
Я инженер по мехатронике, соучредитель Luos . Мы разрабатываем новые технологии, чтобы создавать и производить электронные устройства проще и быстрее.
Как реверсировать небольшой привод постоянного тока (однофазный/двухфазный вход)
Лучший способ реверсирования двигателя постоянного тока — это использование четырехквадрантного статического реверсивного тиристорного преобразователя постоянного тока, управляемого цифровым входом. Двухквадрантный привод также может реверсировать, если включает реверсирование полярности поля. Одноквадрантный привод с внешними контактами может реверсироваться только при нулевой скорости и нулевом токе.
Четырехквадрантный статический реверс достигается за счет дроссельного преобразователя постоянного тока, включающего два полноразмерных полностью управляемых тиристорных моста для якоря. Устройство управляется и блокируется таким образом, что полярность, необходимая для управления нагрузкой в обоих направлениях крутящего момента, а также в обоих направлениях вращения, применяется к двигателю с интервалом всего в несколько миллисекунд в точке переключения. Направление вращения будет контролироваться внешним изменением полярности сигнала заданного значения скорости или, что чаще всего, переключением между двумя аналоговыми входами (один масштабируется для реверса) или выбором блока реверсирования в программно-аппаратном обеспечении привода через цифровой вход. Изменение направления крутящего момента будет автоматически контролироваться либо нагрузкой, изменяющей двигатель, либо уменьшением (или реверсированием) сигнала заданного значения скорости.
Двухквадрантное реверсирование достигается в некоторых дроссельных преобразователях постоянного тока за счет включения компонентов для изменения полярности поля.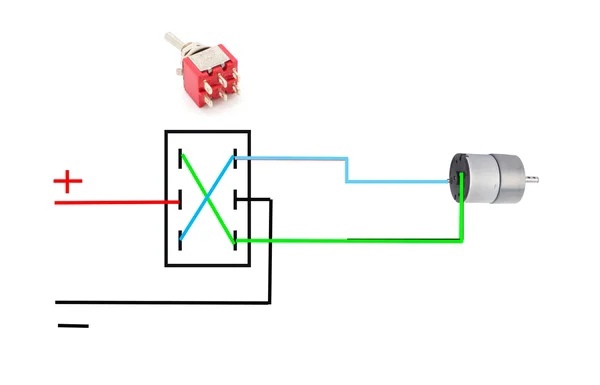 Такая компоновка обычно обеспечивает управление направлением крутящего момента двигателя, так что рекуперативное торможение может быть применено во время аварийной остановки. Направление вращения контролируется цифровыми сигналами при запуске. Реверсирование тока — это то, что обмотка возбуждения двигателя обычно медленная по сравнению с ней, и время, необходимое для переключения крутящего момента, будет определяться постоянной времени возбуждения и любыми настройками в приводном продукте.
Такая компоновка обычно обеспечивает управление направлением крутящего момента двигателя, так что рекуперативное торможение может быть применено во время аварийной остановки. Направление вращения контролируется цифровыми сигналами при запуске. Реверсирование тока — это то, что обмотка возбуждения двигателя обычно медленная по сравнению с ней, и время, необходимое для переключения крутящего момента, будет определяться постоянной времени возбуждения и любыми настройками в приводном продукте.
Одноквадрантный реверс можно реализовать с помощью внешних контактов или платы управления реверсом (как у нас 26037). Если тиристорный преобразователь постоянного тока имеет «полууправляемую» конструкцию (то есть включает два тиристора и два диода), необходимо соблюдать осторожность, чтобы предотвратить завершение последовательности реверсирования привода до того, как двигатель достигнет нулевой скорости. Это связано с тем, что диоды в блоке будут подаваться на якорь с неправильной полярностью, что приведет к короткому замыканию двигателя.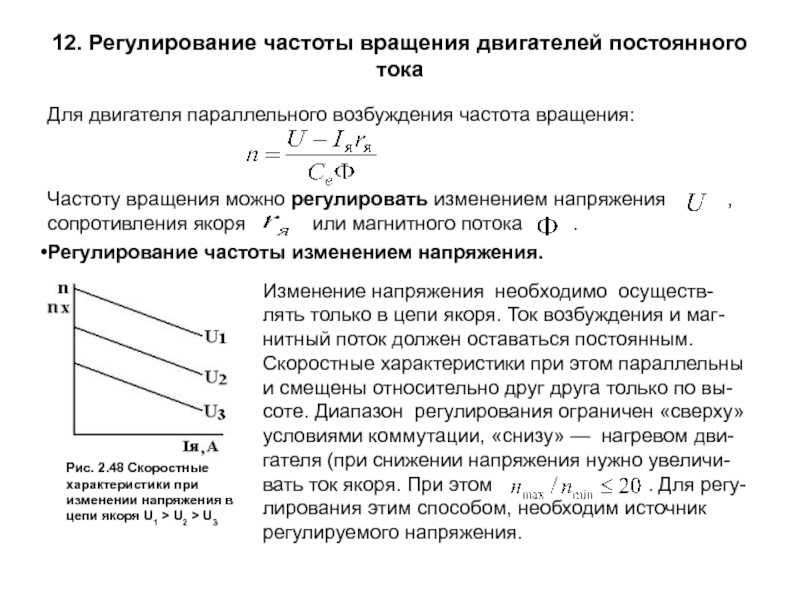 При правильной блокировке переключения при нулевом токе можно использовать стандартные контакторы переменного тока с фиксацией.
При правильной блокировке переключения при нулевом токе можно использовать стандартные контакторы переменного тока с фиксацией.
Плата реверсирования (наша 26037) содержит всю последовательность и контакты, необходимые для реверсирования небольшого тиристорного привода постоянного тока и двигателя. Та же реверсивная карта может быть применена к большим приводам, если в схему включены подходящие ведомые контакторы.
Для системы, основанной только на внешних компонентах, последовательность реле и контактора будет следующей:
- Кнопка «Стоп» отключает «Реле работы» и отключает ввод «Работа» (привод останавливается выбегом).
- «Реле пуска» отключает контактор «Вперед» или «Назад» (ток к этому моменту свободен).
- Таймер на «Реле запуска» не позволяет кнопкам «Пуск» выполнять какие-либо действия до тех пор, пока не истечет время ожидания.
- Кнопка «Пуск вперед» (или кнопка «Пуск назад») замыкает соответствующий контактор постоянного тока — любой контактор при замыкании подает сигнал обратно через второй контакт на соответствующей кнопке, чтобы замкнуть «Рабочее реле» и запустить привод.
