что это такое и как найти
Скольжение – это одна из основных характеристик электродвигателя. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Давайте подробнее разберемся, что такое скольжение электродвигателя, от чего оно зависит и как определяется.
- Что это такое
- Величина скольжения в разных режимах работы
- Способы измерения
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:
где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞<S<0.
Также существует режим электромагнитного торможения (противовключения ротора), в этом режиме скольжение принимает значение больше единицы, со знаком плюс.
Значение частоты тока в обмотках ротора равно частоте тока сети только в момент пуска. При номинальной нагрузке частота тока будет определяться по формуле:
f2=S*f1,
где f1 – частота тока, подаваемого на обмотки статора, а S — скольжение.
Частота тока ротора прямо пропорциональна его индуктивному сопротивлению. Таким образом, проявляется зависимость тока в роторе от скольжения АД. Вращающий момент электродвигателя зависит от величины S, так как определяется значениями величин магнитного потока, тока, углом сдвига между ЭДС и током ротора.
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше. Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:
где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Виды испытаний асинхронных двигателей
- Правила определения фазы, нуля и заземления в сети
- Как выбрать мультиметр для дома и работы
Как определить частоту вращения двигателя?
Как определить частоту вращения двигателя?
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
Как определить число пар полюсов асинхронного двигателя?
По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин.
Как узнать сколько полюсов у двигателя?
Четырехскоростные двигатели бывают двенадцать на восемь на шесть и четыре полюса (12/8/6/4) то есть частоты вращения вала при этом пятьсот, семьсот пятьдесят, тысяча и полторы тысячи оборотов в минуту (1500).
Как определить число пар полюсов формула?
p = (f × 60)/n , где f — частота в сети, для промышленной 50 Гц, n — скорость вращения.
Как определить частоту вращения асинхронного двигателя?
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
Какие характеристики асинхронного двигателя называют рабочим?
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const. Скоростная характеристика n2 = f(P2).
Как определить частоту вращения?
Способ подсчета будет зависеть от размера ведомой шестерни относительно ведущего ЗК. Если ведомая шестерня меньше ведущей, то мы умножаем результат отношения ведущей и ведомой шестерни на частоту вращения ведущего ЗК. Для меньшей шестерни с 20 зубьями мы умножим частоту вращения ведущего ЗК (100) на 4 (см.
Как найти частоту вращения ротора формула?
s = (n — nr )/n . Здесь: n — частота вращения магнитного поля. nr — частота вращения ротора.
Здесь: n — частота вращения магнитного поля. nr — частота вращения ротора.
Как увеличить частоту вращения двигателя постоянного тока?
Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления Rя цепи якоря, изменением магнитного потока Ф, изменением подводимого к двигателю напряжения U.
Как рассчитать скорость вращения колеса?
На эти и многие другие вопросы можно получить ответы с помощью данного расчета. Для этого необходимо поделить частоту вращения вала двигателя на передаточное число текущей передачи. Полученный результат разделить на передаточное число главной передачи — в результате получится частота вращения ведущих колес автомобиля.
Что такое скольжение и каким оно обычно бывает у асинхронных двигателей общего назначения?
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
Скольжение может измеряться в относительных единицах и в процентах.
Почему называется асинхронным двигателем?
Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. Синхронный двигатель имеет отличие в конструкции ротора. … Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора.
Как определяется скольжение асинхронной машины?
По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя: f2 = s х f1, где f1 — частота тока, подводимого к статору. … Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Что такое беличья клетка?
«Беличья клетка» это специальный тип обмотки ротора, где токи протекают по каждой из ветвей. Ветвей обмотки типа «беличья клетка» короткозамкнуты на каждом конце. Полный ток всех ветвей «беличьей клетки» в каждый момент является нулевым.
Полный ток всех ветвей «беличьей клетки» в каждый момент является нулевым.
Почему ротор короткозамкнутый?
Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо. … И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
Какие двигатели переменного тока называется асинхронным?
Асинхро́нный электродвигатель (также Асинхронная машина) — электрический двигатель переменного тока, частота вращения ротора которого не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
Как устроен ротор электродвигателя?
Ротор электродвигателя состоит из вращающегося вала и сердечника с обмотками. … Принципиальное отличие фазных роторов – наличие фазной обмотки в виде витков катушек, которые укладываются в пазы сердечника по всей окружности, причём количество фаз соответствует их числу в статоре.
Для чего нужен ротор в электродвигателе?
Буровой ротор — механизм, являющийся многофункциональным оборудованием буровой установки, который предназначен для вращения бурильных труб и поддержания колонны бурильных или обсадных труб при свинчивании и развинчивании в процессе спуско-подъемных операций, при поисковом бурении и капитальном ремонте скважин.
Можно ли использовать модель электродвигателя в качестве генератора?
Удастся ли заставить его преобразовывать механическую энергию в электрическую, чтобы использовать электродвигатель как генератор? … Благодаря действующему в электротехнике принципу обратимости это возможно.
Как устроен электрический двигатель?
Типы электродвигателей: Электричество подается на обмотку катушки через щетки, расположенные на разных концах якоря (ротора). В результате он превращается в электромагнит, создающий вокруг себя магнитное поле. Когда магнитное поле взаимодействует со статором, якорь начинает вертеться, пытаясь вырваться из поля.
Кто и когда изобрел первый электродвигатель?
Майкл Фарадей
Какие бывают Электродвигатели по мощности?
Ряд номинальных мощностей электродвигателей: 0,06; 0,09; 0,12; 0,18; 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,7; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; 45; 55; 75; 90; 110; 132; 160; 200; 250; 315; 400 кВт.
Как работает двигатель переменного тока?
Как работает электродвигатель Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться.
Что лучше синхронный или асинхронный двигатель?
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель. Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения.
Чем отличаются двигатели постоянного и переменного тока?
Конечным основным отличием является контроль скорости. Скорость двигателя постоянного тока регулируется путем изменения тока обмотки якоря, в то время как скорость двигателя переменного тока регулируется путем изменения частоты, которая обычно выполняется с помощью регулятора частоты вращения.
Какое явление использовано в конструкции электрического двигателя?
В конструкции электрического двигателя использовано явление 1Превращения энергии химической реакции в электрическую
Электрические асинхронные двигатели — скольжение
Асинхронный двигатель переменного тока (переменного тока) состоит из статора и ротора, и взаимодействие токов, протекающих в стержнях ротора, и вращающегося магнитного поля в статоре создает крутящий момент, который вращает двигатель. При нормальной работе с нагрузкой скорость ротора всегда отстает от скорости магнитного поля, что позволяет стержням ротора пересекать силовые линии магнитного поля и создавать полезный крутящий момент.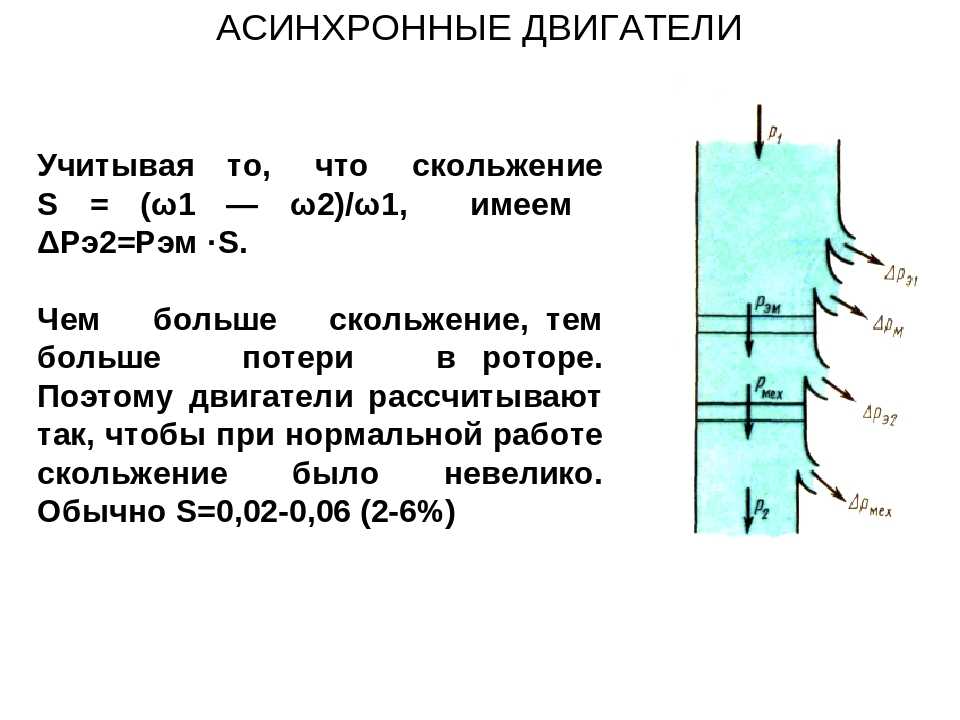
Разность синхронной скорости магнитного поля электродвигателя и скорость вращения вала проскальзывание — измеряется в об/мин или частоте.
Скольжение увеличивается с увеличением нагрузки, что обеспечивает больший крутящий момент.
Скольжение принято выражать как отношение скорости вращения вала к скорости синхронного магнитного поля.
s = (n s — n a ) 100% / n s (1)
2
S = Slip
N S = Синхронная скорость магнитного поля (Rev/Min, RPM)
N A = вращающаяся скорость вала/мин. )
Когда ротор не вращается, скольжение составляет 100 % .
Проскальзывание при полной нагрузке варьируется от менее 1 % для двигателей высокой мощности до более 5-6 % для двигателей малой мощности.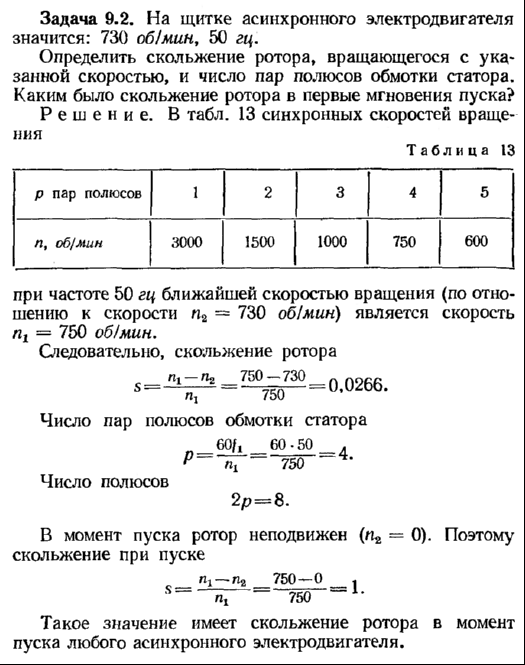
| Motor Size (hp) | 0.5 | 5 | 15 | 50 | 250 |
|---|---|---|---|---|---|
| Typical Slip (%) | 5 | 3 | 2.5 | 1.7 | 0.8 |
Количество полюсов, частота и скорость асинхронного двигателя
| Число магнитных полюсов | Частота 6) 90900 (00905)0076 | |
|---|---|---|
| 50 | 60 | |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 10 | 600 | 720 |
| 12 | 500 | 600 |
| 16 | 375 | 450 |
| 20 | 300 | 360 |
Слип.
 Скольжение и ток двигателя уменьшаются, когда ротор начинает вращаться.
Скольжение и ток двигателя уменьшаются, когда ротор начинает вращаться.
Частота скольжения
Частота уменьшается при уменьшении скольжения.
Скольжение и индуктивное сопротивление
Индуктивное сопротивление зависит от частоты и скольжения. Когда ротор не вращается, частота скольжения максимальна, как и индуктивное сопротивление.
У двигателя есть сопротивление и индуктивность, и когда ротор вращается, индуктивное сопротивление низкое, а коэффициент мощности приближается к на .
Скольжение и импеданс ротора
Индуктивное сопротивление будет изменяться при скольжении, поскольку полное сопротивление ротора является суммой фаз постоянного сопротивления и переменного индуктивного сопротивления.
Когда двигатель начинает вращаться, индуктивное сопротивление высокое, а полное сопротивление в основном индуктивное. Ротор имеет низкий коэффициент запаздывающей мощности. Когда скорость увеличивается, индуктивное сопротивление уменьшается, равное сопротивлению.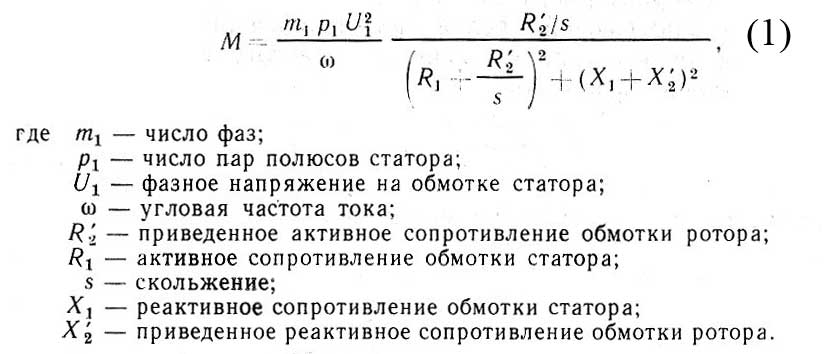
Классификация асинхронных двигателей
Электрические асинхронные двигатели предназначены для различных применений в отношении таких характеристик, как пусковой момент, тяговый момент, скольжение и т. д. — см. классификацию NEMA A, B, C и D электрических асинхронных двигателей.
Что такое скольжение в асинхронном двигателе?
от администратора
Скольжение в асинхронном двигателе — это относительная скорость между вращающимся магнитным потоком и ротором, выраженная в единицах синхронной скорости. Это безразмерная величина. Значение скольжения в асинхронном двигателе никогда не может быть равно нулю.
Если N s и N r — синхронная скорость вращения магнитного потока и скорость ротора соответственно, то относительная скорость между ними равна (Ns – Nr). Следовательно, скольжение определяется как
Скольжение (с) = (Ns – Nr) / Ns
Поскольку мы знаем, что скорость ротора не может быть равна синхронной скорости, т. е. Nr < Ns, значение скольжения s всегда меньше чем один. Для асинхронного двигателя 0
е. Nr < Ns, значение скольжения s всегда меньше чем один. Для асинхронного двигателя 0
При подключении трехфазного источника питания к трехфазной обмотке статора асинхронного двигателя в воздушном зазоре создается вращающееся магнитное поле. Скорость этого вращающегося магнитного поля называется синхронной скоростью. Синхронная скорость определяется количеством полюсов (P) и частотой (f) источника питания. Синхронная скорость равна N = 2f/P об/с (оборот в секунду).
Это вращающееся магнитное поле разрезает проводники стационарного ротора, создавая ЭДС. Поскольку цепь ротора короткозамкнута, эта генерируемая ЭДС приводит к возникновению тока ротора. Взаимодействие этого тока ротора с вращающимся магнитным потоком создает крутящий момент, и, следовательно, ротор начинает вращаться в направлении вращающегося магнитного поля по закону Ленца. Следовательно, между ними устанавливается относительная скорость, равная (N s – N r ), что вызывает скольжение асинхронного двигателя.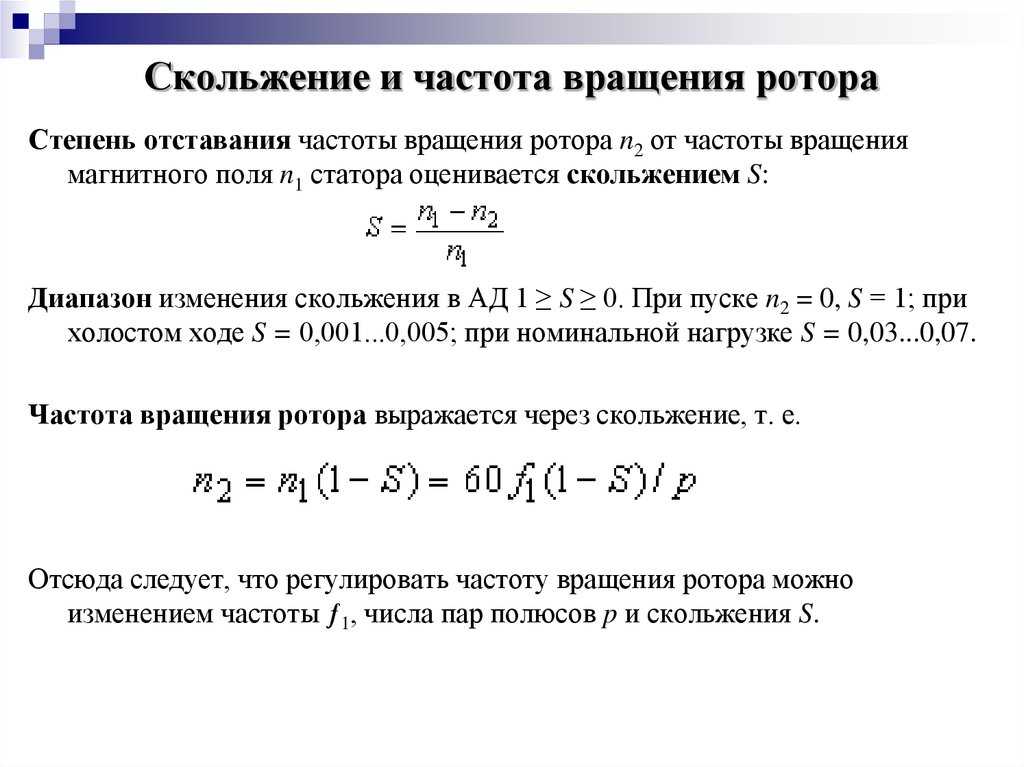
Почему скольжение в асинхронном двигателе никогда не равно нулю?
Нулевое скольжение означает, что скорость ротора равна синхронной скорости. Если ротор вращается с синхронной скоростью в направлении вращающегося магнитного поля, то не будет ни действия срезания потока, ни ЭДС в проводниках ротора, ни тока в проводнике стержня ротора и, следовательно, не будет развития электромагнитного момента. Таким образом, ротор трехфазного асинхронного двигателя никогда не сможет достичь синхронной скорости. Следовательно, в асинхронном двигателе скольжение никогда не равно нулю.
Различные значения скольжения и их значение:
Значение скольжения в асинхронных машинах приведено в таблице ниже. Поведение асинхронной машины сильно зависит от величины скольжения.
| Величина проскальзывания (с) | Значение |
| с = 0 (нулевое скольжение) | Нулевое скольжение означает, что скорость ротора равна синхронно вращающемуся магнитному потоку.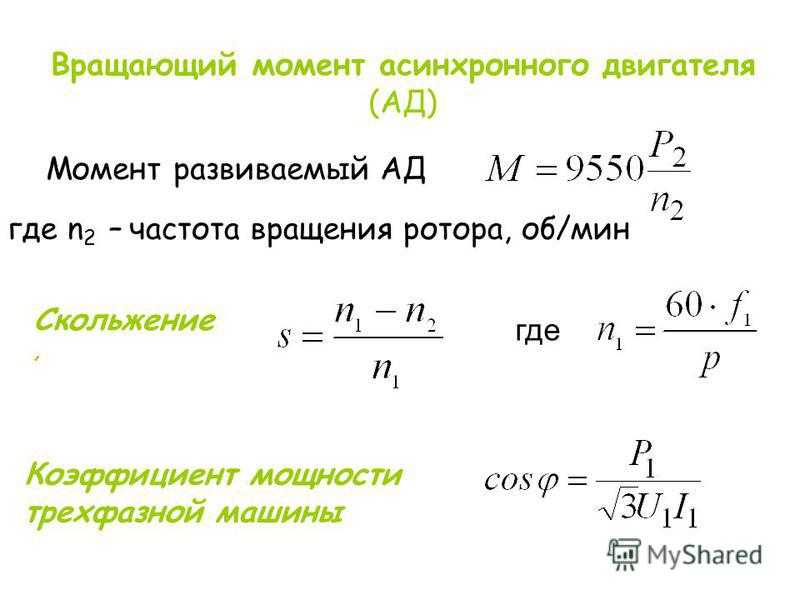 При этом условии не будет никакого относительного движения между катушками ротора и вращающимся магнитным потоком. Таким образом, не будет никакого действия, отсекающего поток катушек ротора. Следовательно, в катушках ротора не будет генерироваться ЭДС для создания тока ротора. Это означает, что электромагнитный момент не будет создаваться. Асинхронный двигатель не будет работать. Поэтому для асинхронного двигателя очень важно иметь положительное значение скольжения. Это причина; скольжение никогда не равно нулю в асинхронном двигателе. При этом условии не будет никакого относительного движения между катушками ротора и вращающимся магнитным потоком. Таким образом, не будет никакого действия, отсекающего поток катушек ротора. Следовательно, в катушках ротора не будет генерироваться ЭДС для создания тока ротора. Это означает, что электромагнитный момент не будет создаваться. Асинхронный двигатель не будет работать. Поэтому для асинхронного двигателя очень важно иметь положительное значение скольжения. Это причина; скольжение никогда не равно нулю в асинхронном двигателе.
|
| с = 1 (скольжение равно 1) | Скольжение = 1, означает, что ротор неподвижен. |
| с = отрицательный (отрицательное скольжение) | Отрицательное значение скольжения в асинхронном двигателе может быть достигнуто, когда скорость вращения ротора больше, чем синхронно вращающийся магнитный поток. Это возможно только при вращении ротора в направлении вращающегося магнитного потока каким-либо первичным двигателем. |