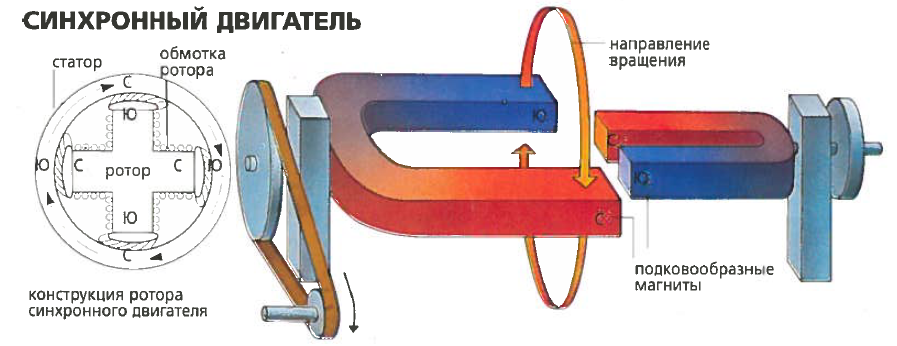
✔ Асинхронные и синхронные электродвигатели
Главным назначением данных агрегатов является преобразование электрической энергии в механическую, что позволяет задействовать массу различных механизмов и устройств.
Чтобы понять, чем отличается синхронный электродвигатель от асинхронного аналога, нужно иметь определенное представление о работе агрегатов. В основе лежит создание индукции магнитных полюсов посредством вращающегося ротора и неподвижного статора. Датчик положения ротора посылает все необходимые данные для регуляции в соответствии с фазами напряжения.
Главное различие асинхронных и синхронных электродвигателей заключается в устройстве ротора, который представляет собой постоянный или электрический магнит, а если быть точнее — в принципе создания полюсов:
- при помощи индукции;
- при помощи катушек или постоянных магнитов.
Преимущества и недостатки синхронных и асинхронных электродвигателей переменного тока:
- Синхронные модели — высокая надёжность и КПД, стабильная частота вращения, не зависящая от нагрузки, простота обслуживания.
 Минусом можно считать некоторую сложность запуска двигателя, а также необходимость питания обмотки постоянным током. В моделях некоторых производителей часто выходят из строя коллекторы и щётки.
Минусом можно считать некоторую сложность запуска двигателя, а также необходимость питания обмотки постоянным током. В моделях некоторых производителей часто выходят из строя коллекторы и щётки. - Асинхронные аналоги — низкое потребление энергии, простота конструкции, эксплуатация в бытовых приборах с использованием однофазного подключения. Главный минус заключается в больших тепловых потерях и сложности регулировки.
 Минусом можно считать некоторую сложность запуска двигателя, а также необходимость питания обмотки постоянным током. В моделях некоторых производителей часто выходят из строя коллекторы и щётки.
Минусом можно считать некоторую сложность запуска двигателя, а также необходимость питания обмотки постоянным током. В моделях некоторых производителей часто выходят из строя коллекторы и щётки.
Конструктивные особенности
Стоит обратить внимание на конструктивные отличия синхронного электродвигателя и асинхронного двигателя.
В состав синхронной конструкции, которая используется и как двигатель, и как генератор, входят следующие детали:
- подшипниковый узел;
- сердечник;
- магниты, индуктор и якорь с обмоткой;
- втулка;
- стальная тарелка.
Стоит добавить, что некоторые новые модели обладают короткозамкнутой пусковой обмоткой, которая позволяет запускать агрегат в асинхронном режиме.
Асинхронные аналоги бывают двух типов (с короткозамкнутым и фазным ротором) и состоят из следующих деталей:
- сердечника и магнитопровода;
- вентилятора с кожухом;
- подшипника;
- клеммной коробки и тройной обмотки;
- контактных колец.
Данная разновидность обладает большей популярностью, поскольку позволяет регулировать частоту вращения вала с помощью реостатов.
Чем отличается синхронный двигатель от асинхронного
Электродвигатели бывают двух основных типов — синхронные и асинхронные. Что представляют собой те и другие?
Что представляет собой синхронный двигатель?
К синхронным принято относить электродвигатели, которые функционируют на переменном токе и имеют ротор с частотой вращения, совпадающей с частотой оборотов магнитного поля в конструкции агрегата.
Ключевые элементы синхронного электродвигателя:
- якорь;
- индуктор.

Первый элемент агрегата располагается на статоре. Индуктор размещается на роторе, который отделен от статора воздушной прослойкой. Структура якоря представлена обмоткой (одной или несколькими). Токи, которые подаются в соответствующий элемент двигателя, формируют магнитное поле, вращающееся с заданной частотой и взаимодействующее с полем индуктора. Индуктор включает 2 полюса — в виде постоянных магнитов.
Синхронный агрегат может функционировать в двух режимах:
- как собственно электродвигатель;
- как генератор.
Первый режим работы предполагает взаимодействие магнитного поля, формирующегося на якоре, и поля, которое образуется на полюсах индуктора. Синхронный двигатель в режиме генератора функционирует за счет электромагнитной индукции: в процессе вращения ротора магнитное поле, которое формируется на обмотке, по очереди взаимодействует с фазами обмотки на статоре, вследствие чего образуется электродвижущая сила.
к содержанию ↑
Что представляет собой асинхронный электродвигатель?
К асинхронным принято относить электродвигатели, в которых частота вращения одного из ключевых элементов — ротора — не совпадает с частотой оборотов магнитного поля, формирующегося током, который возникает на обмотке статора.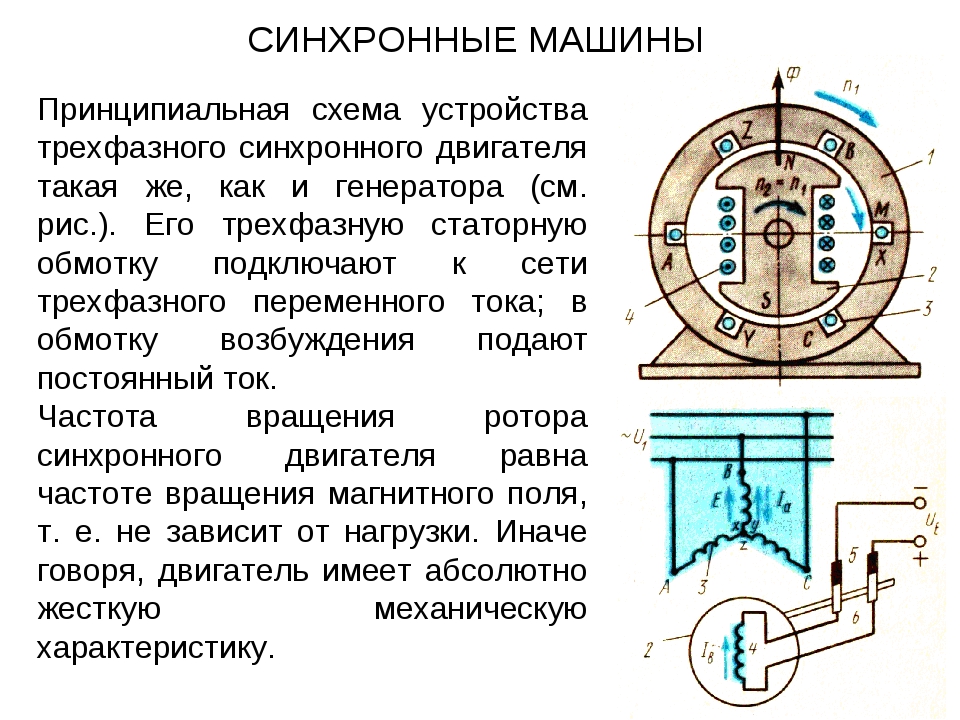 Асинхронные агрегаты иногда именуются индукционными. Это обусловлено тем, что в обмотке ротора осуществляется индуцирование тока при воздействии магнитного поля статора.
Асинхронные агрегаты иногда именуются индукционными. Это обусловлено тем, что в обмотке ротора осуществляется индуцирование тока при воздействии магнитного поля статора.
В конструкции асинхронного электродвигателя присутствуют статор и ротор, которые разделены воздушной прослойкой. Основные активные элементы агрегата:
- обмотка;
- магнитопровод.
Важную роль в функционировании асинхронного двигателя играют дополнительные конструктивные элементы, которые обеспечивают прочность, охлаждение и устойчивость работы агрегата.
к содержанию ↑
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор.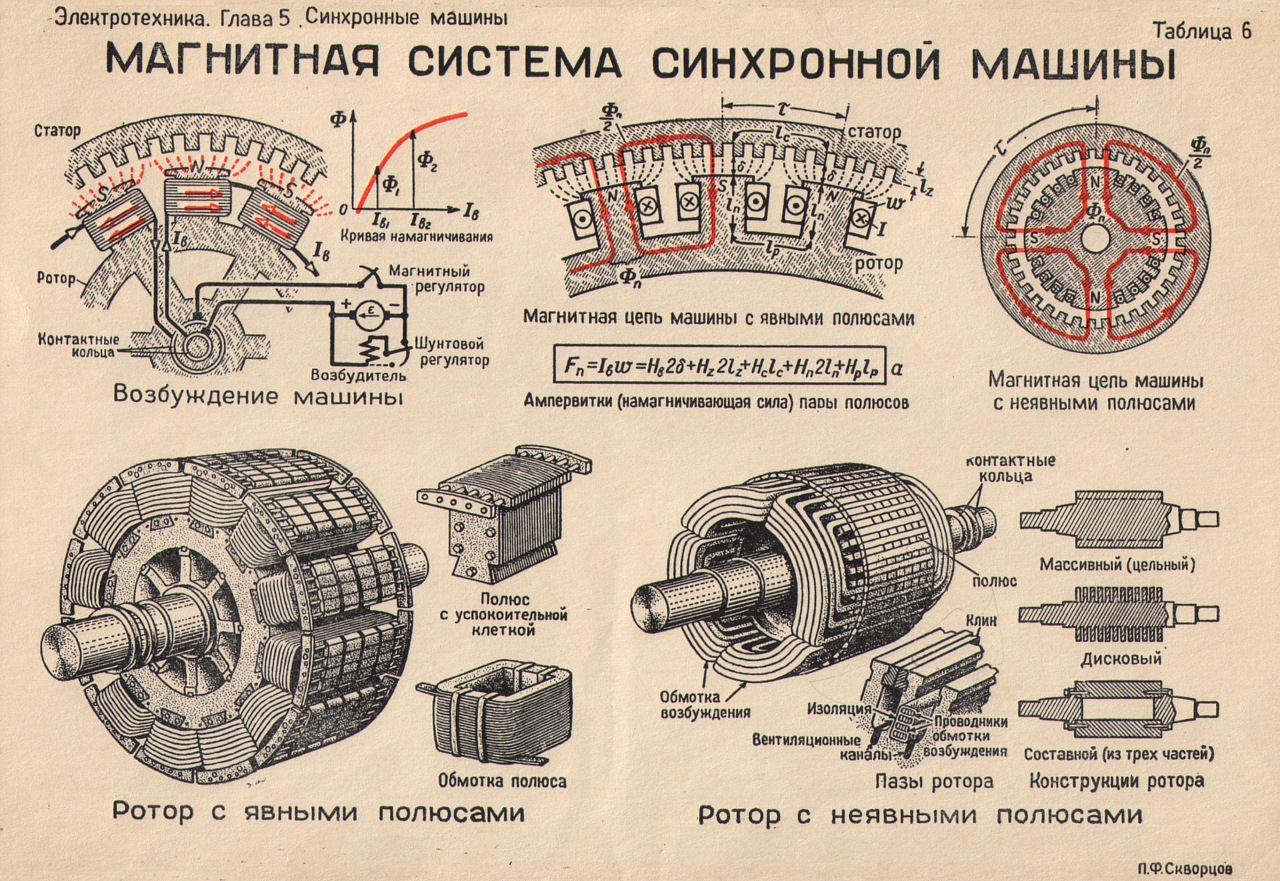 Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
- простота конструкции, надежность;
- относительно невысокая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.
Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
- наличие малого пускового момента;
- наличие большого пускового тока;
- пониженный коэффициент мощности;
- низкая управляемость с точки зрения регулирования скорости;
- зависимость максимальной скорости от частоты электрической сети;
- электромагнитный момент в асинхронных двигателях рассматриваемого типа характеризуется сильной чувствительностью к снижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть неоспоримые достоинства. К таковым можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от нагрузки на ротор.
Есть у синхронных двигателей и недостатки:
- относительная сложность конструкции;
- сложность запуска ротора в ход.
Отмеченные особенности работы синхронных и асинхронных агрегатов делают оптимальным использование первых в случае, если требуемая мощность двигателя в системе (например, как части инфраструктуры фабричной линии) должна составлять порядка 100 кВт и более. В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
Рассмотрев, в чем разница между синхронным и асинхронным двигателем, отразим выводы в таблице.
к содержанию ↑
Таблица
| Синхронный двигатель | Асинхронный двигатель |
| Вращение ротора и магнитного поля в синхронных двигателях осуществляется с одинаковой частотой | Вращение ротора и магнитного поля в асинхронных агрегатах осуществляется с разной частотой |
| Имеет часто более сложную конструкцию | Обычно имеет менее сложную конструкцию |
| Оптимален при необходимой мощности в 100 кВт и выше | Оптимален при необходимой мощности менее 100 кВт |
Чем асинхронные электродвигатели отличаются от синхронных
Самые распространённые электродвигатели — трёхфазные машины переменного тока. Они есть двух видов — асинхронные и синхронные. В этой статье рассказывается в чём сходство и различие между машинами обоих типов и область их применения.
Они есть двух видов — асинхронные и синхронные. В этой статье рассказывается в чём сходство и различие между машинами обоих типов и область их применения.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.
Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
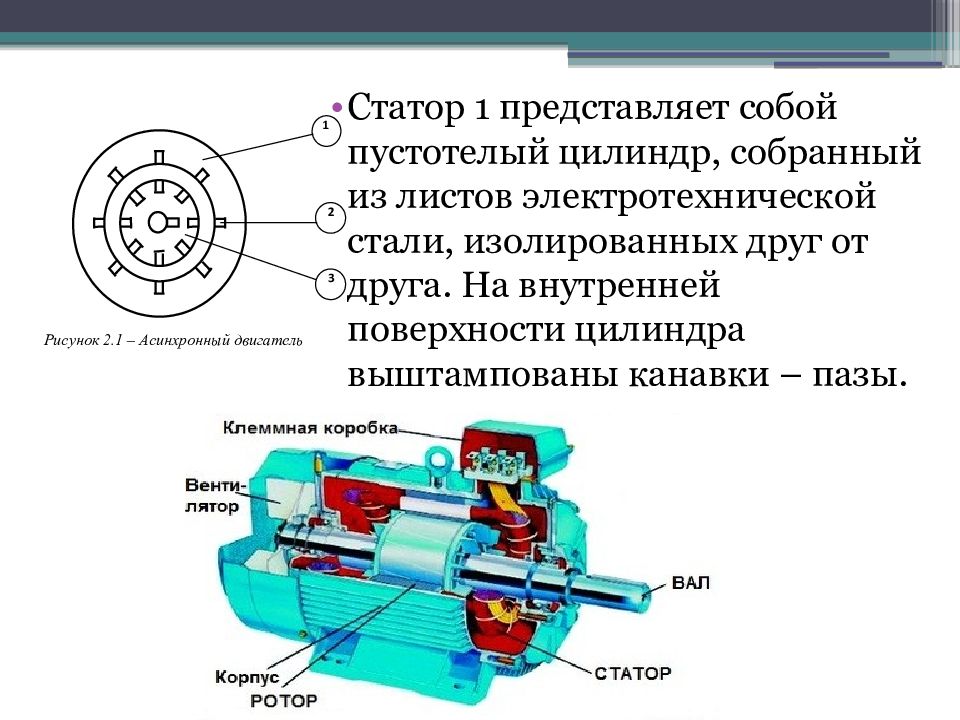
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор. В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
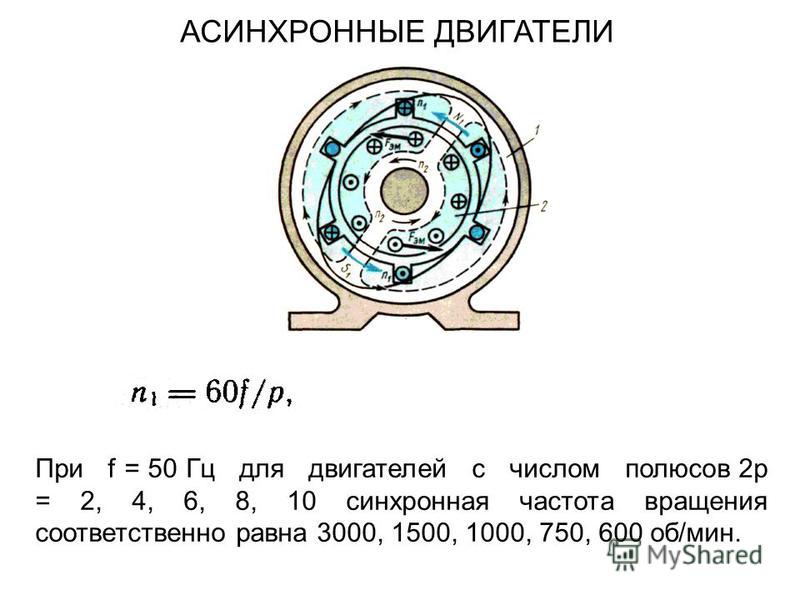
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.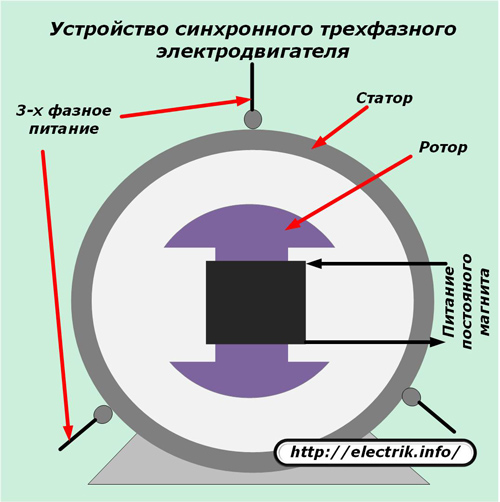
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке.
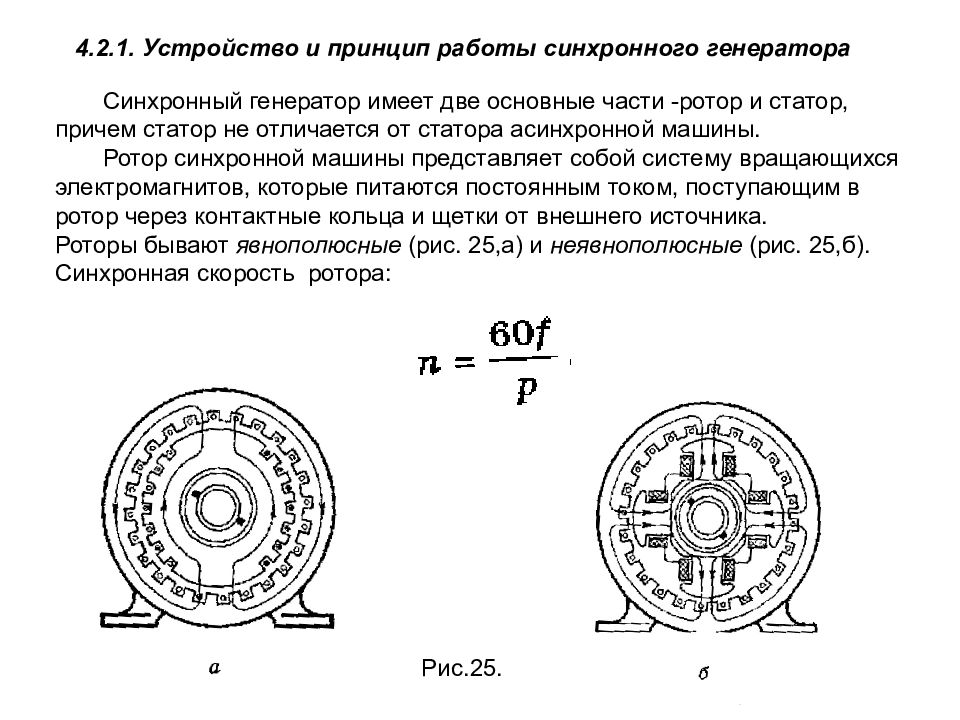
Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником. На время пуска они переключаются в звезду.
- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
Пуск синхронных электромашин
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.
- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
Особенности и применение разных видов электродвигателей
У каждого типа двигателей есть достоинства и недостатки по сравнению с другими. Это определяет область их применения. Применение разных типов электромашин зависит от их особенностей конструкции и принципа действия.
Достоинства и использование асинхронных электродвигателей
Такие машины имеют достоинства перед синхронными аппаратами:
- простота конструкции и низкая цена; аппараты с фазным ротором позволяют регулировать скорость вращения и осуществлять плавный пуск без использования преобразователей частоты;
- большое разнообразие мощностей — от нескольких ватт до десятков киловатт.

Кроме достоинств есть недостатки:
- падение скорости вращения при росте нагрузки;
- более низкий КПД и большие габариты, чем у синхронных аппаратов той же мощности;
- кроме активной, такие аппараты потребляют реактивную (индуктивную) мощность, что ведёт к необходимости устанавливать компенсаторы или дополнительно оплачивать реактивную электроэнергию.
Используются такие машины практически везде, где необходимо приведение в движение механизма и есть трёхфазное напряжение 380 вольт.
Применение синхронных машин
- Регулировка путём изменения тока возбуждения cos φ. Это позволяет уменьшить ток потребления, габариты и сечение подводящего кабеля, а также увеличить КПД. Кроме того, такие аппараты используются в качестве компенсаторов реактивной мощности.
- Менее чувствительны к колебаниям напряжения и обладают большей перегрузочной способностью, особенно к ударным нагрузкам. Способность к превышению мощности повышается путём перевозбуждения обмоток ротора. Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах.
- Частота вращения не меняется при изменения нагрузки. Поэтому синхронные машины применяются в прецизионных станках в металлургии, машиностроении и деревообатывающей промышленности.
 Способность к превышению мощности повышается путём перевозбуждения обмоток ротора. Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах.
Способность к превышению мощности повышается путём перевозбуждения обмоток ротора. Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах.
Чем отличается синхронный двигатель от асинхронного
Промышленные электродвигатели классифицируются по разным параметрам. Одной из определяющих характеристик является принцип работы. Так, различают синхронный и асинхронный двигатели. В чем же разница между ними?
Синхронный двигатель способен работать, одновременно совмещая функции двигателя и генератора. Его характерной особенностью является неизменяемая частота роторного вращения от нагрузки. Синхронные двигатели применяются в различных сферах.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Как правило, якорь находится в статоре, а индуктор располагается в роторе. Для моторов повышенной мощности устанавливаются электрические магниты для полюсов, а для маломощных — постоянные. На короткое время принцип работы синхронного двигателя включает в себя и асинхронный режим, используемый для разгона до номинальной скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. По достижении необходимой скорости индуктор начинают питать постоянным током.
Как правило, якорь находится в статоре, а индуктор располагается в роторе. Для моторов повышенной мощности устанавливаются электрические магниты для полюсов, а для маломощных — постоянные. На короткое время принцип работы синхронного двигателя включает в себя и асинхронный режим, используемый для разгона до номинальной скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. По достижении необходимой скорости индуктор начинают питать постоянным током.
К недостаткам синхронных двигателей относят необходимость питания обмотки постоянным током, сложность запуска и скользящий контакт. Однако, несмотря на это, большинство генераторов, применяемых в различных промышленных областях, являются синхронными. К преимуществам таких двигателей относят высокую надежность, большой коэффициент полезного действия, простоту обслуживания.
Асинхронный двигатель — это механизм, трансформирующий электрическую энергию переменного тока в механическую.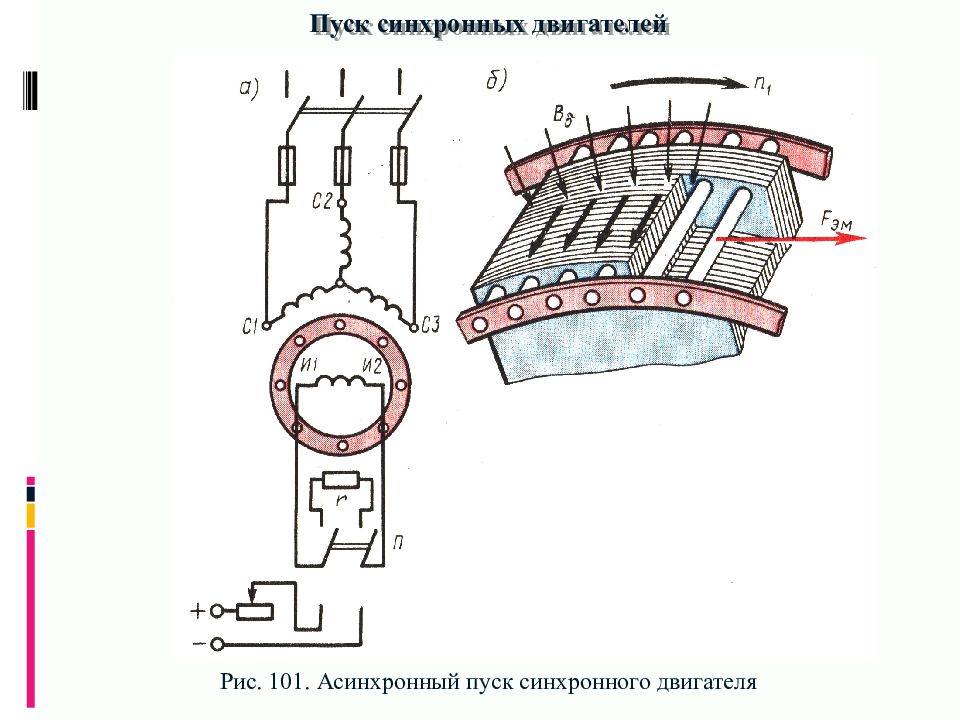 Частота вращения магнитного поля статора у таких устройств выше роторной. Асинхронный двигатель состоит из статора цилиндрической формы и ротора. Он работает на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Частота вращения магнитного поля статора у таких устройств выше роторной. Асинхронный двигатель состоит из статора цилиндрической формы и ротора. Он работает на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Таким образом, ключевое отличие синхронного и асинхронного двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните, асинхронные двигатели короткозамкнутые.
Основным недостатком асинхронных двигателей является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя приходится изменять расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
В синхронном двигателе частота вращения является постоянной, в отличие от асинхронного. Поэтому первый применяют в областях, где необходима постоянная скорость и полная управляемость, к примеру, в насосах, вентиляторах и компрессорах.
Выводы:
-
Синхронный двигатель способен работать, одновременно совмещая функции двигателя и генератора. -
Синхронные двигатели являются более современными, чем асинхронные. -
Синхронные двигатели имеют более высокий КПД, чем асинхронные. -
Ключевое отличие синхронного и асинхронного двигателей — в роторе. -
В синхронном двигателе частота вращения является постоянной, в отличие от асинхронного. -
Асинхронные двигатели труднее регулируются.
Отличия асинхронных двигателей от синхронных
Применение электродвигателей в различных отраслях промышленности и быта широко распространено, в связи с экономичностью и простотой подключения и обслуживания. Для различных механизмов, применяются двигатели разной мощности и устройства. В этой статье рассмотрим, чем отличается синхронный двигатель от асинхронного, в каких механизмах они применяются и как правильно выбрать тип электрического мотора.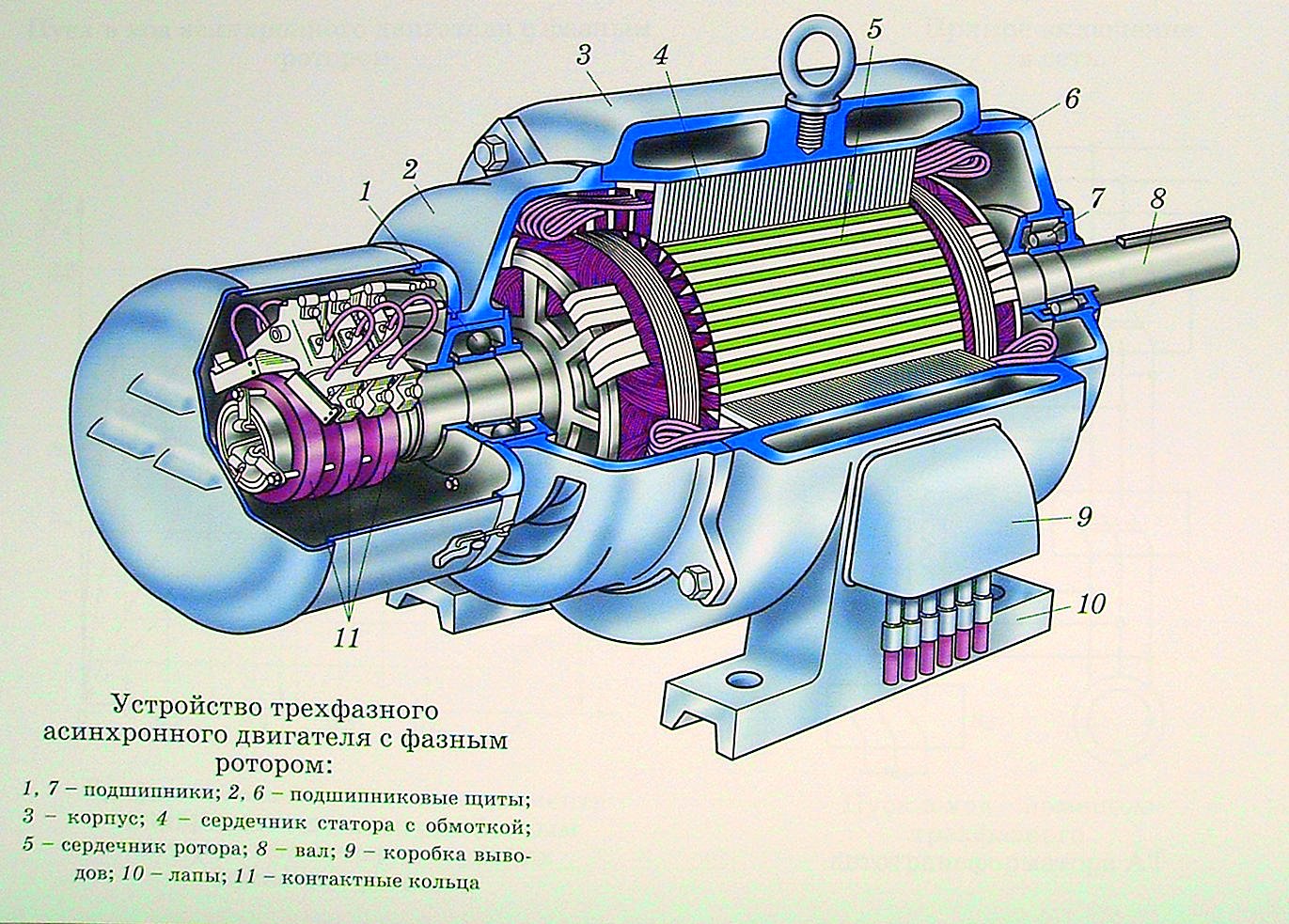
Асинхронные двигатели
Как и любые электрические двигатели, асинхронные моторы представляют собой устройства, которые создают крутящий момент при помощи преобразования электрического тока. Если говорить простыми словами, асинхронный двигатель – это электромотор с неравнозначной частотой вращения ротора и магнитного поля. Магнитное поле ротора в таких устройствах всегда вращается с меньшей частотой, чем поле статора.
Строение асинхронного двигателя в целом аналогично с синхронным. Он состоит из:
- Цилиндрического статора из металлических пластин с пазами для обмотки;
- Фазного либо короткозамкнутого ротора;
- Подвижных и неподвижных деталей корпуса, таких как вал, подшипники, вентилятор охлаждения, электрического оборудования.
Используется тип двигателя асинхронный в различных приводах как в промышленности, так и быту. Например, для обеспечения работы конвейеров, подъемных механизмов кранов и экскаваторов, деревообрабатывающих станков и других механизмов, как крупногабаритных, так и небольших бытовых.
Обслуживание и ремонт такого типа электромоторов не требует больших затрат, однако, для трансформации крутящего момента и понижения частоты вращения необходимо использовать редуктора различной сложности, часто с большим передаточным числом.
Синхронные двигатели
Основное отличие синхронного двигателя от асинхронного в том, что частота вращения магнитных полей при его работе совпадает, то есть является синхронной. Для синхронизации частот вращения используется дополнительный источник постоянного питания, что делает конструкцию синхронного электродвигателя сложнее и частично ограничивает сферу применения такого вида машин. Кроме того, работа такого типа двигателя возможна только с использованием частотного преобразователя.
В сфере применения, электродвигатели синхронные – это промышленные моторы большой мощности, которые используются в различных промышленных устройствах и оборудовании, где необходима повышенная мощность и возникают перегрузки.
Важной особенностью такого типа электромоторов является то, что при работе с перегрузкой устройство отдает часть реактивной мощности в сеть, что способствует повышению мощности, компенсирует падение мощности.
Синхронные двигатели бывают также таких типов:
- Гистерезисные двигатели используются в точных механизмах для создания вращения. Например, в звукозаписи, медицинском оборудовании, машиностроении
- Шаговые электродвигатели применяются в точных приборах и механизмах, таких как, например, станки с числовым программным обеспечением.
Преимущества и недостатки синхронных и асинхронных электродвигателей
Что бы определить, какой двигатель лучше синхронный или асинхронный, необходимо рассмотреть сферу применения этих устройств.
Асинхронные двигатели дешевле в производстве и не требуют дополнительного питания и устройства для запуска, в отличии от синхронных, поэтому, их использование более распространено. Кроме того, подключение и обслуживание таких двигателей также стоит дешевле, как и их производство.
Синхронные двигатели, кроме повышенной мощности, обладают еще одним важным преимуществом – возможностью генерации низкой частоты вращения без использования дополнительных передач в редукторах. При этом, мощность на выходном валу остается неизменной. Синхронный двигатель имеет повышенный коэффициент полезного действия, более полно трансформируя электрическую энергию в крутящий момент.
При этом, мощность на выходном валу остается неизменной. Синхронный двигатель имеет повышенный коэффициент полезного действия, более полно трансформируя электрическую энергию в крутящий момент.
Однако, синхронные двигатели имеют и недостатки. Кроме того, что требуется дополнительное питание и оборудование запуска, в таком типе электродвигателей происходит быстрый износ подвижных токосъемных деталей, таких как щётки и контактные кольца. Для замены изношенного оборудования требуются средства, что еще более увеличивает стоимость использования синхронных моторов.
Кроме того, настройка и обслуживание синхронных двигателей имеет ряд особенностей и требует более глубоких знаний технических особенностей.
Какой тип двигателя выбрать
При выборе типа электрического двигателя следует учитывать такие факторы:
- Сферу применения и оборудование, которое приводится в движение электродвигателем;
- Стоимость оборудования и его обслуживания;
- Тип преобразующего редуктора, применяемого для понижения скорости вращения;
- Тип питания и электрической сети.
Учитывая эти факторы и принимая во внимание расчет механизма, можно подобрать тип двигателя, который будет обеспечивать бесперебойную работу устройства, максимально экономить электроэнергию и обеспечивать необходимую мощность.
При использовании любого вида электрических двигателей стоит помнить, что срок их службы зависит от соблюдение технического регламента при подключении, настройке и последующему обслуживанию такого оборудования. При нарушении технических требований электродвигатель выйдет из строя, несмотря на его преимущества и надежность.
Часто задаваемые вопросы (FAQ) | ЛУКОЙЛ ЭПУ Сервис
FAQ: вентильные электродвигатели
- В чем преимущество вентильных электродвигателей?
- Какая система управления вентильным электродвигателем используется в станциях «Ритэкс»?
- Чем отличается двигатель с 8-ми полюсной системой от 6-ти и 4-х.? Что лучше?
- Какой диапазон частот вращения у погружных вентильных электродвигателей?
- Какие существуют методы управления вентильными двигателями?
- Будет ли вращаться вентильный электродвигатель, если его напрямую подключить к трехфазной питающей сети?
FAQ: вентильные и синхронные электродвигатели
- В чем различие синхронной машины и вентильного электродвигателя?
- В чем различие вентильного и шагового электродвигателей (области применения)?
- Почему не используются в нефтяной области универсальные коллекторные электродвигатели постоянного тока, ведь они не требуют сложной системы управления как вентильные электродвигатели?
- Какова зависимость момента от угла сдвига Фр относительно Фс. ?
 ?
?FAQ: вентильные и асинхронные электродвигатели
- Каковы габаритные размеры вентильных и асинхронных электродвигателей одинаковой мощности?
- Как зависит момент на валу вентильных и асинхронных погружных электродвигателей от тока.
- Пусковые токи вентильных и асинхронных электродвигателей.
- Борьба за снижения пусковых токов в асинхронных двигателях.
- В чем отличие структуры цены вентильных и асинхронных электродвигателей?
- Можно ли вращать вентильный электродвигатель станцией управления от асинхронного двигателя?
- Можно ли вращать асинхронный двигатель от станции управления вентильным электродвигателем?
- Чем определяется различие КПД вентильных и асинхронных электродвигателей?
- Разница КПД 6-8% в пользу погружного вентильного электродвигателя — это много или мало?
FAQ: вентильные двигатели в составе погружной установки
- Что является пагубным для погружного оборудования?
- Всегда ли есть смысл устанавливать оборудование с вентильным двигателям?
FAQ: вентильные электродвигатели
В чем преимущество вентильных электродвигателей?
См. статью Сравнение вентильного и асинхронного двигателей
статью Сравнение вентильного и асинхронного двигателей
Какая система управления вентильным электродвигателем используется в станциях «Ритэкс»?
Шестипульсная коммутация (см. статью Элементы теории вентильного привода).
Чем отличается двигатель с 8-ми полюсной системой от 6-ти и 4-х.? Что лучше?
С увеличением полюсности увеличивается частота частота питающего напряжения при неизменной частоте вращения (для 8-ми полюсного двигателя 3000 об/мин — 200 Гц, для 4-х полюсного 6000 об/мин – 200 Гц). Таким образом, низкооборотные двигатели проектируются с повышенным числом полюсов. Высокооборотные — с пониженным.
Какой диапазон частот вращения у погружных вентильных электродвигателей?
От 250 (для привода винтовых насосов) до 6 000 (10 000) об/мин.
Какие существуют методы управления вентильными двигателями?
Существуют два основных метода: первый — управление коммутацией (6-ти пульсное управление) и второй — векторное управление (см. статью Элементы теории вентильного привода).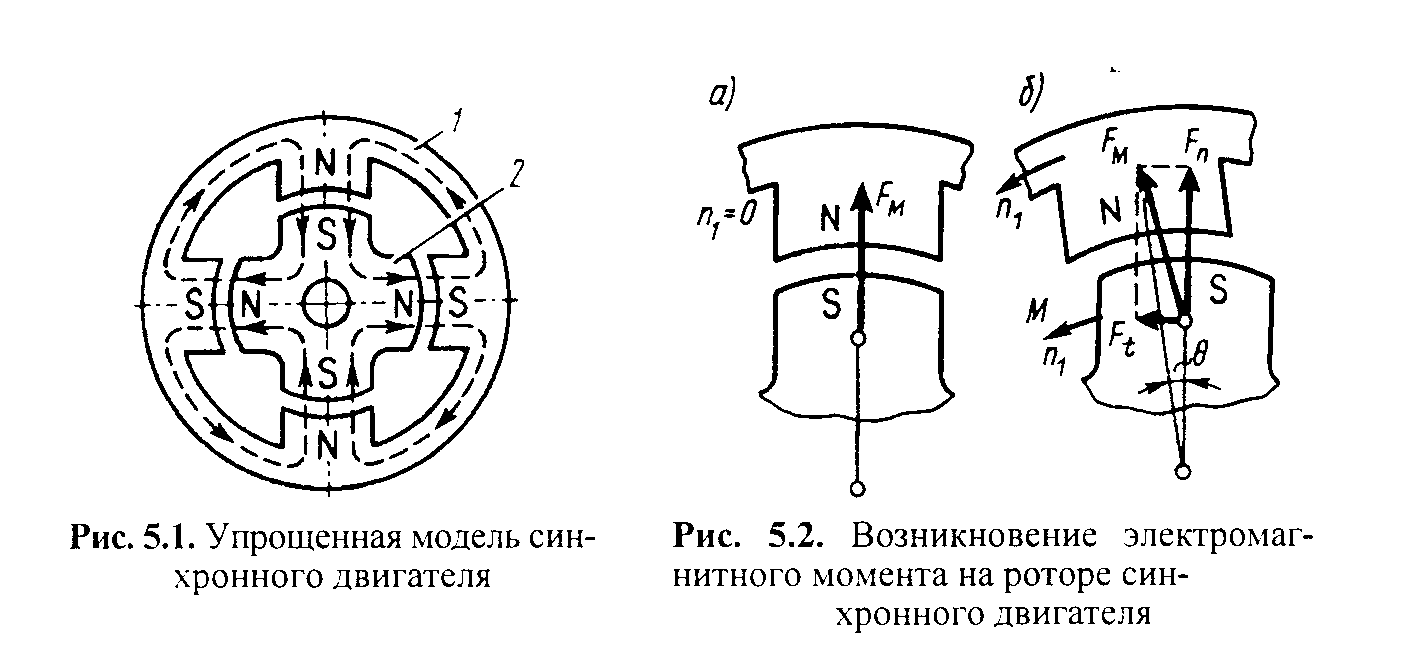
Будет ли вращаться вентильный электродвигатель, если его напрямую подключить к трехфазной питающей сети?6>
Стартовать с места не будет, однако, если раскрутить каким либо способом до частоты питающего напряжения (8-ми полюсный двигатель 750 об/мин) и подключить к сети, то он будет работать как синхронная машина переменного тока.
FAQ: вентильные и синхронные электродвигатели
В чем различие синхронной машины и вентильного электродвигателя?
Конструктивно вентильный двигатель и синхронная машина с постоянными магнитами неотличимы. Отличие только в системе управления. В синхронной машине ротор движется за полем, в вентильным двигателе поле подстраивается под движение ротора.
В чем различие вентильного и шагового электродвигателей (области применения)?
Шаговый электродвигатель сконструирован для дискретного поворота вала с жестким позиционированием. Вентильный — для непрерывного вращения.
Почему не используются в нефтяной области универсальные коллекторные электродвигатели постоянного тока, ведь они не требуют сложной системы управления как вентильные электродвигатели?
Надежность щеточного узла и его энергетические характеристики при работе в масле не позволяет использовать его в качестве погружного электродвигателя. Кроме того удельные энергетические характеристики (мощность на единицу массы или объема) коллекторного двигателя значительно (в разы) хуже чем у вентильного.
Кроме того удельные энергетические характеристики (мощность на единицу массы или объема) коллекторного двигателя значительно (в разы) хуже чем у вентильного.
Какова зависимость момента от угла сдвига Фр относительно Фс.?
Практически синусоидальная.
FAQ: вентильные и асинхронные электродвигатели
Каковы габаритные размеры вентильных и асинхронных электродвигателей одинаковой мощности?
Длина активной части вентильного электродвигателя как минимум в два раза меньше чем у аналогичного асинхронного.
Как зависит момент на валу вентильных и асинхронных погружных электродвигателей от тока.
У вентильных — практически линейно, у асинхронных двигателей присутствует значительный ток холостого хода как минимум половина от номинального, что ухудшает его энергетические характеристики при частичной нагрузке.
Пусковые токи вентильных и асинхронных электродвигателей.
Для вентильного двигателя (как и для асинхронного с частотником) пусковой ток не превышает рабочий. Для асинхронного двигателя с прямым пуском пусковой ток в 5-7 раз больше рабочего.
Для асинхронного двигателя с прямым пуском пусковой ток в 5-7 раз больше рабочего.
Борьба за снижения пусковых токов в асинхронных двигателях.
Изменение конструкции асинхронного двигателя снижающее пусковые токи одновременно ухудшают энергетические характеристики в номинальном режиме. В связи с этим наиболее предпочтительным является применение частотных преобразователей, которые позволяют применять конструкции двигателя с оптимальными энергетическими характеристиками без оглядки на пусковые токи (при прямом включении двигателя, спроектированного для работы с частотником пусковой ток может превышать рабочий более чем в 10 раз!).
В чем отличие структуры цены вентильных и асинхронных электродвигателей?
Цена вентильного электродвигателя = цена асинхронного электродвигателя — стоимость обмотки ротора + стоимость постоянных магнитов. (Магниты в разы стоят дороже меди, но с единицы длины вентильного электродвигателя снимается мощность примерно в два раза большая чем у асинхронного).
Можно ли вращать вентильный электродвигатель станцией управления от асинхронного двигателя?
Можно, если эта станция с частотным преобразователем, но при этом не удастся в полной мере реализовать преимущества вентильного двигателя при работе с трансформатором и длинной линией (высока вероятность опрокидывания при резком изменении нагрузки).
Можно ли вращать асинхронный двигатель от станции управления вентильным электродвигателем?
Возможно создание алгоритма для такой работы, но энергетическая эффективность будет понижена.
Чем определяется различие КПД вентильных и асинхронных электродвигателей?
За поле ротора в асинхронном двигателе мы платим по счетчику, а в вентильном — один раз при изготовлении.
Разница КПД 6-8% в пользу погружного вентильного электродвигателя — это много или мало?
6-8% разницы КПД — это 50-80% разницы в потерях и соответственное снижение перегрева двигателя и как следствие — повышение надежности (при снижении температуры обмотки на 10 градусов наработка на отказ увеличивается в 2-4 раза!). Однако, получение экономического эффекта возможно только при правильном подборе и выводе на режим погружного оборудования, поскольку КПД насоса работающего не в режиме может уменьшаться в 2 и более раз, что сводит на нет эффект от повышенных энергетических характеристик вентильного электродвигателя. Таким образом применение вентильных электродвигателей повышает требования к квалификации технологов и исследователей.
Однако, получение экономического эффекта возможно только при правильном подборе и выводе на режим погружного оборудования, поскольку КПД насоса работающего не в режиме может уменьшаться в 2 и более раз, что сводит на нет эффект от повышенных энергетических характеристик вентильного электродвигателя. Таким образом применение вентильных электродвигателей повышает требования к квалификации технологов и исследователей.
FAQ: вентильные двигатели в составе погружной установки
Что является пагубным для погружного оборудования?
Наиболее вредным для установки является работа в режиме срыва подачи и первоначального выхода на режим, поскольку отсутствует течение жидкости вокруг двигателя и через насос. Вентильный электродвигатель значительно более терпимый к этим режимам. Известны случаи, когда они несколько суток работали в режиме срыва подачи на оборотах близких к максимальным. Для асинхронного двигателя такие условия — неминуемая гибель. Это связано со значительно меньшим уровнем потерь и соответственно меньшим тепловыделением у вентильных электродвигателей.
При выводе на режим вентильные двигатели в отличие от асинхронных не требуют останова для охлаждения.
У технологов, длительно эксплуатируемых вентильные электродвигатели сложилось мнение что, сжечь вентильный электродвигатель при исправной грозозащите практически невозможно, поэтому его применяют на наиболее сложных скважинах, где зачастую сожжен не один асинхронник.
Всегда ли есть смысл устанавливать оборудование с вентильным двигателям?
Если характеристики скважины известны и можно гарантировать выход насоса на оптимальный режим при применении асинхронного двигателя прямого пуска, то его применение может оказаться экономически более выгодным из-за более низкой стоимости установки.
Асинхронный двигатель с частотником практически всегда менее эффективен чем вентильный привод.
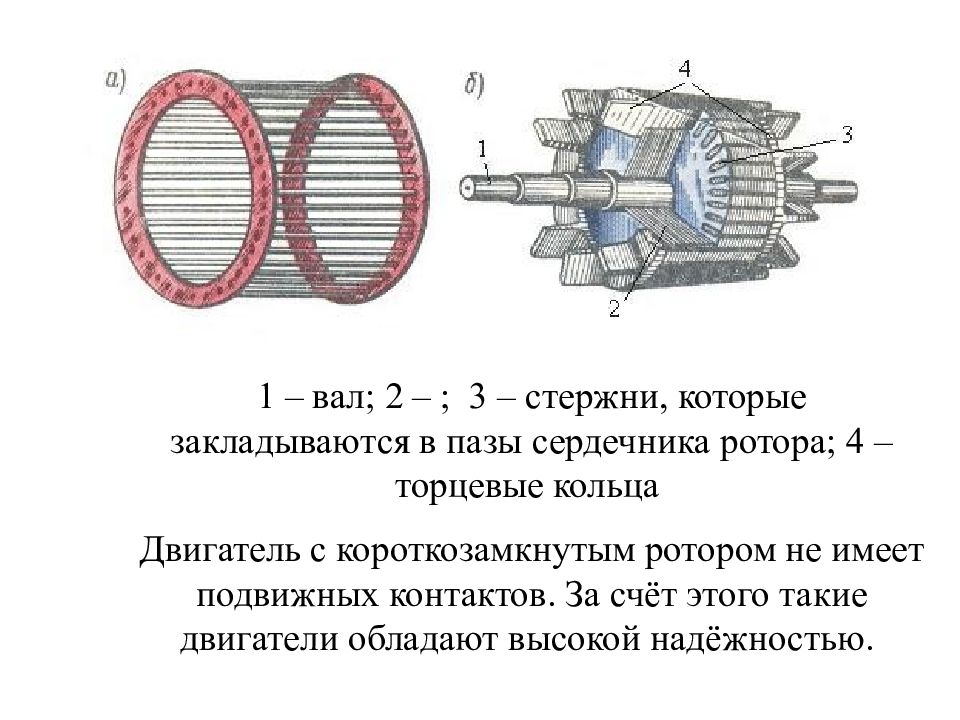
Какак разница между короткозамкнутым и фазным ротором
Какак разница между короткозамкнутым и фазным ротором
Ротор — вращающаяся часть двигателей и рабочих машин, на которой расположены органы, получающие энергию от рабочего тела или отдающие её рабочему телу.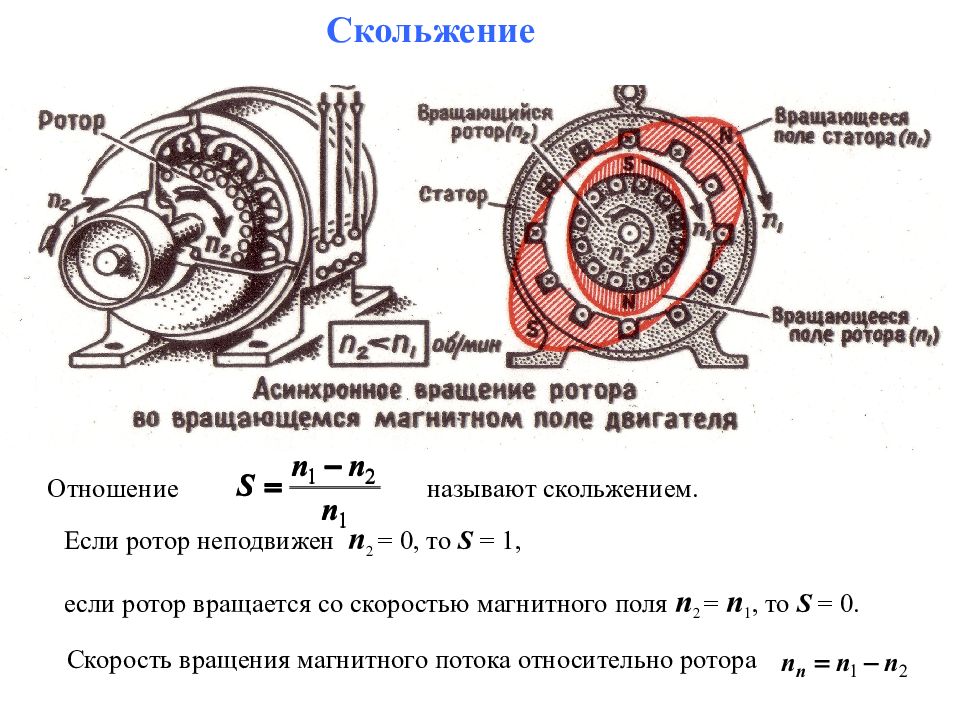
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле.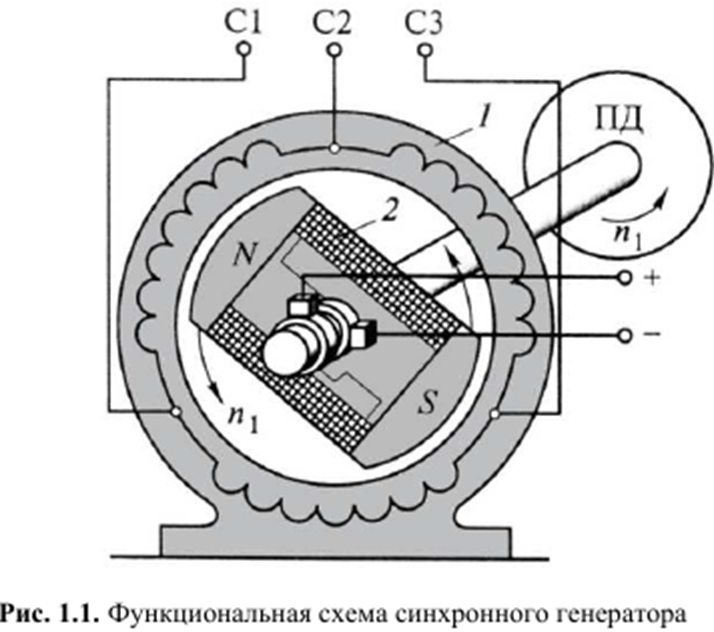 Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля. И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т. д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Ранее ЭлектроВести писали, что в Атлантическом океане первый в мире телескопический ветрогенератор обеспечивает электроэнергией 5000 домохозяйств на одном из Канарских островов — Гран-Канария.
По материалам: electrik.info.
Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного тока можно разделить на две основные категории — (i) синхронный двигатель и (ii) асинхронный двигатель . Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга. Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.
Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.
Конструктивная разница
- Синхронный двигатель : Статор имеет осевые пазы, которые состоят из обмотки статора, намотанной на определенное количество полюсов.Обычно используется ротор с явнополюсным ротором, на котором установлена обмотка ротора. Обмотка ротора запитана постоянным током с помощью контактных колец. Также можно использовать ротор с постоянными магнитами.
Синхронный двигатель - Асинхронный двигатель : Обмотка статора аналогична обмотке синхронного двигателя. Он накручивается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой.В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко с концевыми кольцами. В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Асинхронный двигатель

Разница в рабочих
- Синхронный двигатель : Полюса статора вращаются с синхронной скоростью (Нс) при питании от трехфазного источника питания. Ротор питается от источника постоянного тока.Во время пуска ротор необходимо вращать со скоростью, близкой к синхронной. В этом случае полюса ротора магнитно соединяются с вращающимися полюсами статора, и, таким образом, ротор начинает вращаться с синхронной скоростью.
- Синхронный двигатель всегда работает со скоростью, равной его синхронной скорости.
т.е. фактическая скорость = синхронная скорость
или N = Ns = 120f / P - Узнайте больше о работе синхронного двигателя здесь.
- Асинхронный двигатель : Когда на статор подается двух- или трехфазный источник переменного тока, создается вращающееся магнитное поле (RMF). Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора порождает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором. Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.
 Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора порождает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором. Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.
Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора порождает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором. Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.Прочие отличия
- Синхронным двигателям требуется дополнительный источник постоянного тока для питания обмотки ротора.Асинхронные двигатели не требуют дополнительного источника питания.
- Контактные кольца и щетки необходимы в синхронных двигателях, но не в асинхронных двигателях (за исключением асинхронного двигателя с обмоткой, в котором двигатели с контактным кольцом используются для добавления внешнего сопротивления обмотке ротора).
- Синхронным двигателям требуется дополнительный пусковой механизм для первоначального вращения ротора, близкого к синхронной скорости. В асинхронных двигателях пусковой механизм не требуется.
- Коэффициент мощности синхронного двигателя можно отрегулировать на отстающий, единичный или опережающий, изменяя возбуждение, тогда как асинхронный двигатель всегда работает с отстающим коэффициентом мощности.
- Синхронные двигатели обычно более эффективны, чем асинхронные.
- Синхронные двигатели дороже.
 В асинхронных двигателях пусковой механизм не требуется.
В асинхронных двигателях пусковой механизм не требуется.Асинхронный двигатель
против синхронного: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока есть вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора. Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для подачи электрического тока во вращающийся якорь. В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками.Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько меньшей скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора.
Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.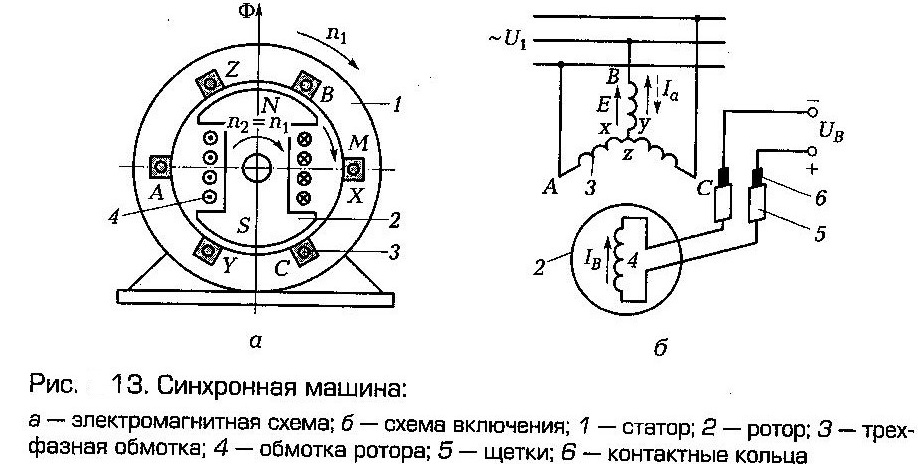 Твердый сердечник ротора состоит из листов электротехнической стали.
Твердый сердечник ротора состоит из листов электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Это асинхронные двигатели с фазным ротором. Смысл конструкции состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо.Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически становятся такими же, как у ротора с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока. Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора.Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора.Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора. Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора.Когда к статору изначально подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота индуцируемого в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два параметра через f r = sf. Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента).Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока. Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
N = 120f / P = 60 футов / P
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
Промышленный синхронный двигатель.
Синхронные двигатели переменного тока малой мощности полезны там, где требуется точное время. Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока. Обычно их классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машиной. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением постоянным током.
Синхронные двигатели без возбуждения имеют стальные роторы.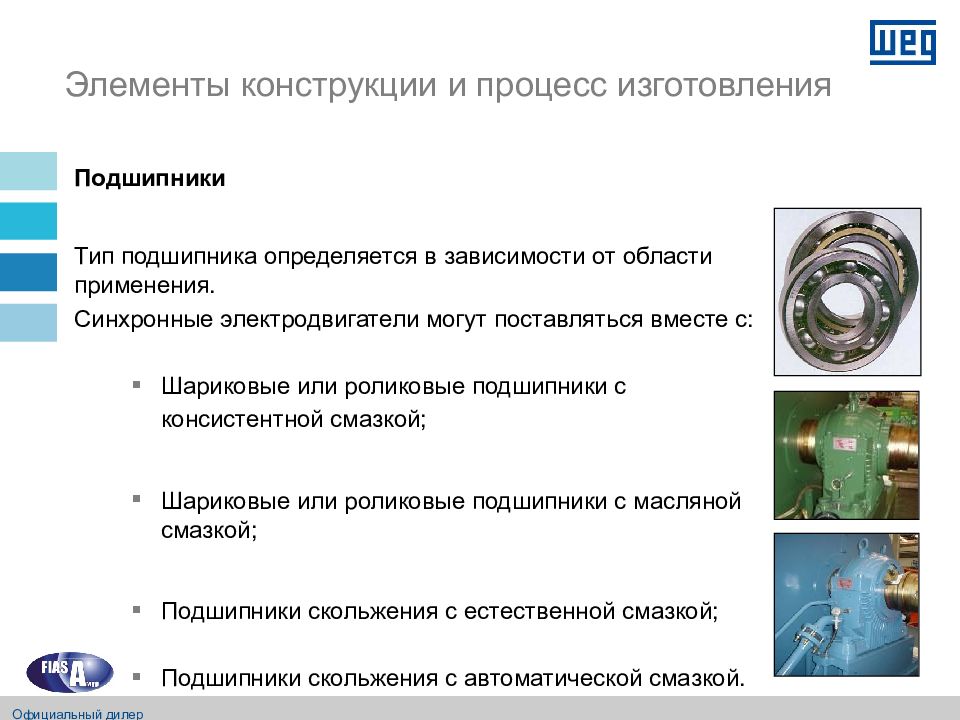 В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы. Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
В двигателе с гистерезисом используется широкая петля гистерезиса в высококоэрцитивном роторе из кобальтовой стали. Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и коробка передач не требуется.
Пример двигателя с постоянными магнитами с электронной коммутацией, в данном случае от небольшого воздушного вентилятора.Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора. Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.
Синхронный двигатель с прямым возбуждением может называться различными названиями, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянными магнитами.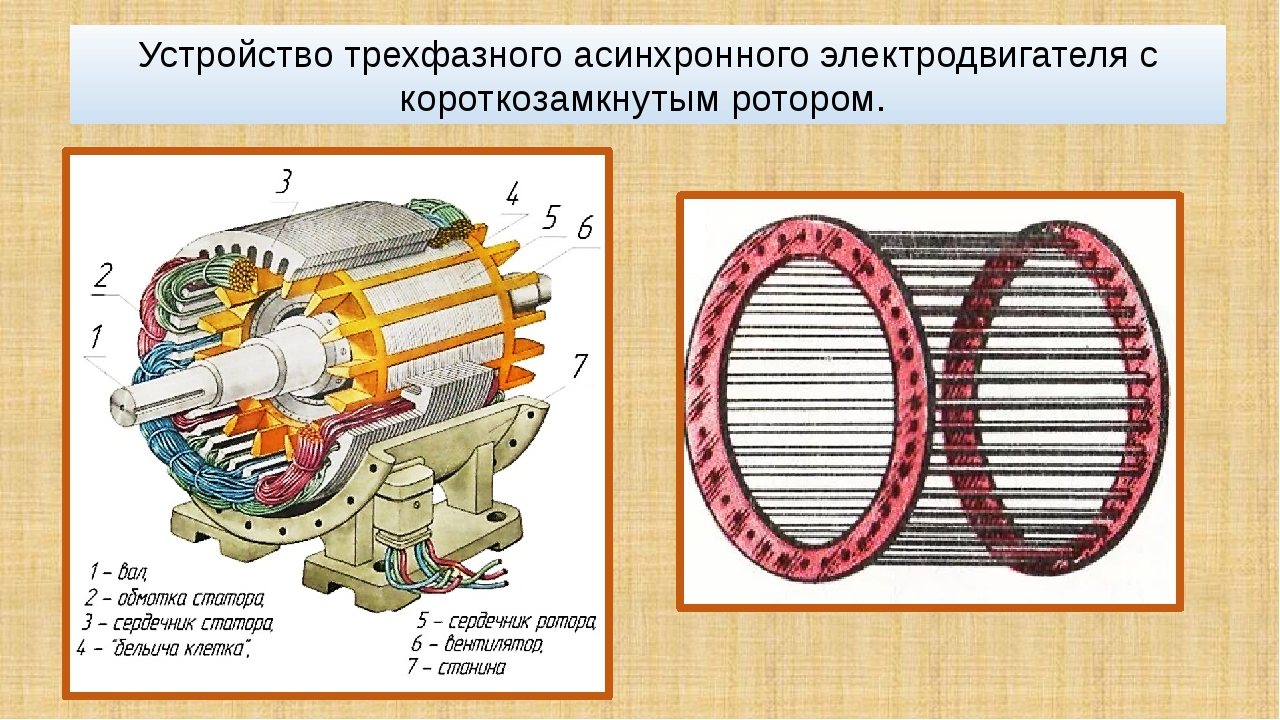 Ротор содержит постоянные магниты.Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Ротор содержит постоянные магниты.Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Пример того, как на катушки двигателя постоянного тока подается питание в последовательности, которая приводит в движение ротор.
Компьютер управляет последовательным включением питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается.Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов.Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых роторы имеют проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора.Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
Разница между асинхронным двигателем и синхронным двигателем
Разница между асинхронным двигателем и Синхронный двигатель объясняется с помощью различных факторов, например типа возбуждения, используемого в машине. Скорость двигателя, запуск и работа, эффективность обоих двигателей, его стоимость, использование, области применения и частота.
| ОСНОВА РАЗЛИЧИЯ | СИНХРОННЫЙ ДВИГАТЕЛЬ | ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Тип возбуждения | Синхронный двигатель — это машина с двойным возбуждением. | Асинхронный двигатель — это машина с одним возбуждением. |
| Система питания | Обмотка якоря питается от источника переменного тока, а обмотка возбуждения — от источника постоянного тока. | Его обмотка статора запитана от источника переменного тока. |
| Скорость | Он всегда работает с синхронной скоростью. Скорость не зависит от нагрузки. | При увеличении нагрузки скорость асинхронного двигателя уменьшается. Это всегда меньше синхронной скорости. |
| Запуск | Это не самозапуск. Перед синхронизацией с источником переменного тока его необходимо каким-либо образом разогнать до синхронной скорости. | Асинхронный двигатель имеет самозапускающийся крутящий момент. |
| Эксплуатация | Синхронный двигатель может работать с запаздывающей и опережающей мощностью, изменяя его возбуждение. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности становится очень низким. При высоких нагрузках коэффициент мощности становится очень низким. |
| Использование | Может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок. | Асинхронный двигатель используется только для привода механических нагрузок. |
| КПД | Он более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. | Его КПД ниже, чем у синхронного двигателя той же мощности и номинального напряжения. |
| Стоимость | Синхронный двигатель дороже, чем асинхронный двигатель с той же мощностью и номинальным напряжением | Асинхронный двигатель дешевле, чем синхронный двигатель с той же мощностью и номинальным напряжением. |
Асинхронный двигатель также известен как асинхронный двигатель . Он назван так потому, что никогда не работает с синхронной скоростью.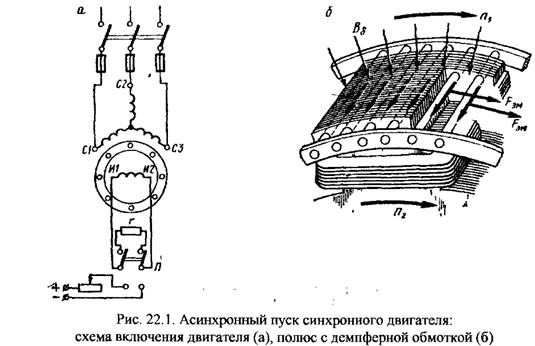 то есть N s = 120f / P . Асинхронный двигатель является наиболее широко используемым двигателем во всех отечественных и коммерческих двигателях.Синхронный двигатель всегда поддерживает синхронную скорость. Скорость ротора поддерживается или синхронизируется с током питания.
то есть N s = 120f / P . Асинхронный двигатель является наиболее широко используемым двигателем во всех отечественных и коммерческих двигателях.Синхронный двигатель всегда поддерживает синхронную скорость. Скорость ротора поддерживается или синхронизируется с током питания.
Разница между трехфазным асинхронным двигателем и синхронным двигателем
- Трехфазный синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением.
- Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
- всегда работает с синхронной скоростью, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает с меньшей синхронной скоростью. Если нагрузка увеличилась, скорость асинхронного двигателя уменьшается.
- Асинхронный двигатель имеет самозапускающийся момент, тогда как синхронный двигатель не самозапускается. Перед синхронизацией с источником переменного тока его необходимо каким-либо образом разогнать до синхронной скорости.
- Синхронный двигатель может работать с запаздывающей и опережающей мощностью, изменяя его возбуждение.Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности асинхронного двигателя становится очень низким.
- Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к подаче крутящего момента для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок.
- Синхронный двигатель более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения.
- Синхронный двигатель дороже асинхронного двигателя той же мощности и номинального напряжения.
Синхронный двигатель
Следовательно, асинхронный двигатель отличается от синхронного двигателя.
Основное различие между асинхронным двигателем и синхронным двигателем | by Starlight Generator
Основное отличие состоит в том, что асинхронный двигатель является асинхронной машиной, тогда как другой, как следует из названия, является синхронной машиной.
Асинхронный двигатель:
Асинхронный двигатель состоит из статора с проводниками, размещенными в определенных положениях в зависимости от требований к фазе.Например, в трехфазном двигателе проводники расположены под пространственным углом 120 градусов. Ротор в асинхронном двигателе состоит из проводников, обычно закороченных с помощью концевых колец, или имеет внешнюю обмотку, которая может быть подключена через внешнее сопротивление. Рассмотрим случай трехфазного асинхронного двигателя. При включении питания создается вращающееся магнитное поле, называемое полем статора. Это поле вращается со скоростью Ns, называемой синхронной скоростью. Это поле индуцирует ЭДС в проводниках ротора, которая, в свою очередь, вызывает протекание тока в закороченных проводниках ротора. Прохождение этого тока создает магнитное поле ротора, которое следует за полем статора. Ротор вращается со скоростью Nr. Относительная скорость между ротором и статором равна Ns-Nr, что называется скоростью скольжения. Скорость поля ротора по отношению к полю статора будет (Ns-Nr) + Nr. [Относительная скорость между статором и ротором + скорость ротора]. Таким образом, скорость поля ротора также будет Нс. Два поля вращаются с одинаковой скоростью в одном направлении, но скорость ротора никогда не может быть равна синхронной скорости.Если скорость ротора равна синхронной скорости, существует относительное движение между полем статора и проводниками ротора, следовательно, возникают ЭДС и ток, наведенные бо, и, следовательно, крутящий момент отсутствует. Таким образом, асинхронный двигатель никогда не может работать с синхронной скоростью, отсюда и название асинхронный двигатель.
Прохождение этого тока создает магнитное поле ротора, которое следует за полем статора. Ротор вращается со скоростью Nr. Относительная скорость между ротором и статором равна Ns-Nr, что называется скоростью скольжения. Скорость поля ротора по отношению к полю статора будет (Ns-Nr) + Nr. [Относительная скорость между статором и ротором + скорость ротора]. Таким образом, скорость поля ротора также будет Нс. Два поля вращаются с одинаковой скоростью в одном направлении, но скорость ротора никогда не может быть равна синхронной скорости.Если скорость ротора равна синхронной скорости, существует относительное движение между полем статора и проводниками ротора, следовательно, возникают ЭДС и ток, наведенные бо, и, следовательно, крутящий момент отсутствует. Таким образом, асинхронный двигатель никогда не может работать с синхронной скоростью, отсюда и название асинхронный двигатель.
Синхронный двигатель:
Статор синхронного двигателя аналогичен статору асинхронного двигателя.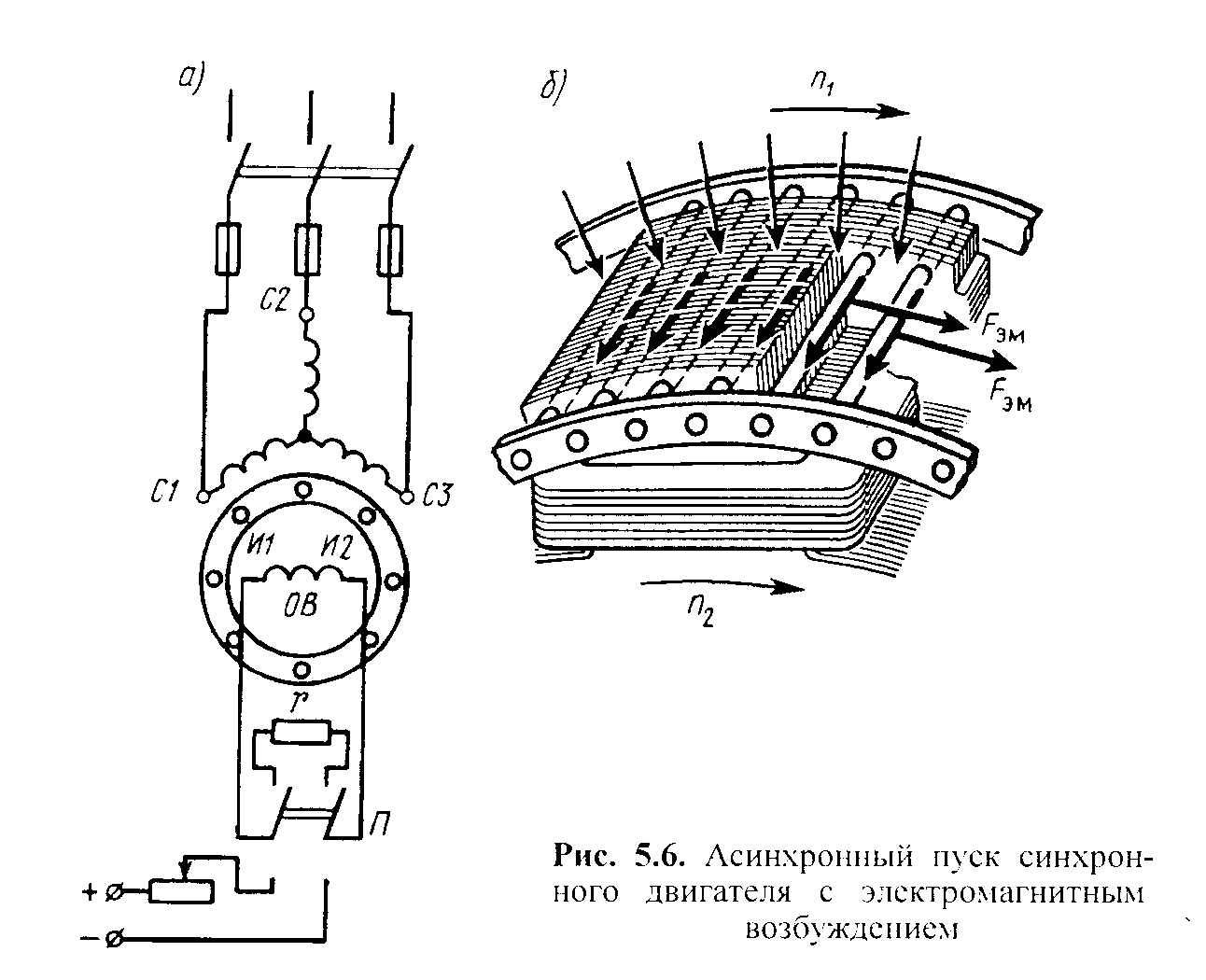 Ротор синхронного двигателя состоит из электромагнита, создаваемого возбуждением постоянным током.Это создает поле ротора. Трехфазное питание статора создает вращающееся магнитное поле с синхронной скоростью. Поле ротора теперь следует за полем статора с запаздыванием по углу, но вращается с синхронной скоростью. Синхронный двигатель может работать только с синхронной скоростью.
Ротор синхронного двигателя состоит из электромагнита, создаваемого возбуждением постоянным током.Это создает поле ротора. Трехфазное питание статора создает вращающееся магнитное поле с синхронной скоростью. Поле ротора теперь следует за полем статора с запаздыванием по углу, но вращается с синхронной скоростью. Синхронный двигатель может работать только с синхронной скоростью.
В двух словах, крутящий момент в асинхронном двигателе создается из-за относительной скорости, тогда как в синхронном двигателе производство крутящего момента происходит из-за углового отставания между двумя полями.
Основное отличие состоит в том, что асинхронный двигатель является асинхронной машиной, тогда как другой, как следует из названия, является синхронной машиной.
Асинхронный двигатель:
Скорость: Скорость асинхронного двигателя всегда меньше синхронной скорости и зависит от нагрузки, поскольку скорость уменьшается с увеличением нагрузки.
Пусковой крутящий момент: Этот тип двигателя имеет собственный пусковой момент.
Возбуждение: это машина с одиночным возбуждением, в которой обмотки статора возбуждаются от источника переменного тока.В отличие от синхронного двигателя, асинхронный двигатель работает только при отстающем коэффициенте мощности.
Эффективность: сравнительно менее эффективен.
Стоимость: Стоимость асинхронной машины меньше по сравнению с синхронным двигателем той же мощности.
Синхронный двигатель:
Скорость: Начиная с его названия «синхронный», этот двигатель работает с синхронной скоростью независимо от величины нагрузки. Скорость такого двигателя не зависит от нагрузки.
Пусковой крутящий момент: Этот двигатель не имеет самозапуска, поэтому для запуска синхронной машины должны быть предусмотрены некоторые другие вспомогательные средства.
Возбуждение: Синхронный двигатель — это машина с двойным возбуждением. Обмотка возбуждения, которая является ротором, возбуждается от источника постоянного тока, а его статор, который является обмоткой якоря, возбуждается от источника переменного тока. В дополнение к этому его можно заставить работать с коэффициентом мощности, опережающим по сравнению с отстающим коэффициентом мощности, просто изменив его возбуждение.
В дополнение к этому его можно заставить работать с коэффициентом мощности, опережающим по сравнению с отстающим коэффициентом мощности, просто изменив его возбуждение.
КПД: Он сравнительно более эффективен, чем асинхронный двигатель.
Стоимость: Этот тип двигателя намного дороже, чем асинхронный двигатель аналогичного номинала.
Таким образом, мы можем суммировать основные различия между асинхронной машиной и синхронной машиной:
Индукционная машина самозапускается, а синхронная машина — нет.
Индукционная машина работает по принципу электромагнитной индукции, аналогично трехфазным трансформаторам. Короткозамкнутая обмотка ротора действует как токопроводящая петля внутри переменного магнитного поля, где магнитное поле изменяется из-за разницы в скорости между магнитным полем ротора и статора.Синхронная машина работает по принципу возбуждения ротора с помощью постоянного тока и заставляет его вести себя как электромагнит, так что он заставляется синхронизироваться с синхронной скоростью магнитного поля.
Как мы видим, асинхронный двигатель вращается и выдает мощность на несинхронных скоростях (при наличии относительного потока, разрезающего ротор), в то время как синхронные машины предназначены для работы на синхронных скоростях.
В случае асинхронного двигателя подойдет любая скорость, отличная от синхронной, и вы получите выходной сигнал, в то время как для синхронной машины единственный способ изменить скорость — это изменить частоту.Другими словами, синхронная машина — это машина с постоянной скоростью (синхронной скоростью).
Влияние нагрузки: Увеличение нагрузки асинхронного двигателя приводит к снижению скорости. Однако в случае синхронной машины это изменение скорости не подлежит обсуждению, вместо этого система пытается вращаться с самой синхронной скоростью, но с разницей между выровненными положениями статора и оси полюса ротора, называемой углом нагрузки.
Синхронный двигатель испытывает «рывки» при резком изменении нагрузки.Это означает, что ротор из-за инерции не может мгновенно достичь своего равновесия и колеблется в нужном положении. В любом случае, это нежелательное явление с точки зрения двигателя (так как оно вызывает большие колебания потребляемого тока). Следует отметить, что в асинхронных машинах нет рывков.
Starlight Power может предоставить синхронный генератор от 20кВт до 3000кВт с хорошим качеством и низкой ценой.
Синхронные двигатели и асинхронные двигатели
Электродвигатели бывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать при поиске лучшего варианта.
Первый шаг в поиске любого двигателя — это определение его источника питания; он питается от постоянного или переменного тока? Это разделит варианты на две большие категории, двигатели переменного тока и двигатели постоянного тока, и исключит любые двигатели, которые не будут работать с вашим источником питания. Однако обе эти категории по-прежнему содержат много видов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (в нашей статье о бесщеточных и щеточных двигателях постоянного тока рассматриваются основные типы двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные двигатели и асинхронные двигатели, и в этой статье дается краткое объяснение обоих, а также сравниваются их рабочие характеристики и области применения.
Двигатели асинхронные
Асинхронные двигатели
считаются одними из самых распространенных двигателей переменного тока, используемых сегодня в промышленности. Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени, чтобы их оптимизировать для работы во многих приложениях. Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции для создания механического вращения. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, прочтите наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше.Вообще говоря, цель асинхронных двигателей — пропустить переменный ток через катушки в статоре, которые будут создавать магнитное поле, а частота колебаний источника переменного тока заставит это магнитное поле вращаться. Это вращающееся магнитное поле (RMF) затем будет индуцировать противоположные магнитные поля в роторе (свободно движущийся якорь, прикрепленный к выходному валу) и вызывать полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока напрямую не соответствует количеству оборотов выходного вала.Это явление известно как «проскальзывание» и происходит потому, что ротор всегда играет в магнитную игру «догонять» с RMF. Наличие проскальзывания означает, что точное время для асинхронных двигателей затруднено. Как было сказано ранее, эти двигатели можно найти в бытовых приборах, электромобилях и даже в крупном механизированном промышленном оборудовании, поскольку они бывают сотнями скоростей, крутящих моментов, напряжений, размеров и форм. Для получения дополнительной информации об этих машинах, узнайте больше в нашей статье об асинхронных двигателях.
Двигатели синхронные
Синхронные двигатели охватывают основы, недоступные для асинхронных двигателей, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и т. Д. Они достигают этого, соединяя магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора вращает ротор с точной синхронной скоростью.Есть много способов заблокировать эти полюса, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приводятся конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции не обязательно должны получать питание от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели не являются самозапускающимися по своей природе, то есть этим двигателям часто требуется пускатель двигателей для разгона их роторов на полную скорость.Эти пускатели не часто используются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без первоначального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, даже несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы позволить разработчикам регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, хотя, как правило, дороже асинхронных двигателей, обладают более высоким КПД (> 90%) и являются отличным выбором для дробилок, мельниц, измельчителей и других низкоскоростных и высокомощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока по-прежнему довольно широки, в этой статье будет дано общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций. Ниже, в таблице 1, показано качественное сравнение некоторых характеристик, общих для асинхронных двигателей и синхронных двигателей, и показаны преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных двигателей и синхронных двигателей.
Характеристики | Асинхронные двигатели | Двигатели синхронные |
Сложность | Простой дизайн | Комплекс |
Самозапускающийся | Обычно да | Обычно нет |
Плотность мощности | Среднее значение | Высокая |
КПД | Среднее значение | Высокая |
Регулятор коэффициента мощности | Нет (всегда с запаздыванием) | Да (может опережать и отставать) |
Стоимость | Низкий | Высокая |
Сложность (или ее отсутствие) асинхронных двигателей — лучшее преимущество, которое они имеют перед синхронными конструкциями.Их очень просто производить, эксплуатировать и обслуживать, и поэтому асинхронные двигатели в целом дешевле синхронных. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготавливать / ремонтировать, и требует дополнительных схем, которые необходимо покупать и устанавливать, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно самозапускаются, а синхронные — нет. Это означает, что асинхронным двигателям для эффективной работы требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Плотность мощности — это количество мощности (обычно измеряется в лошадиных силах HP или киловаттах кВт), генерируемых на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя над асинхронным.
Синхронные двигатели в некоторых случаях могут достигать КПД> 90% и, как правило, более энергоэффективны, чем асинхронные двигатели.Эффективность зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает меньшие потери энергии при преобразовании электрической энергии в механическую.
Коэффициент мощности — это отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с этим потери. Например: завод должен работать на 1000 кВт (рабочая мощность), а электросчетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая измеряется в киловольт-амперах, или кВА, и составляет используется для выражения энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этого завода составляет 1000/1250 = 0,8 или 80%, что означает, что только 80% тока, подаваемого на завод, используется для полезной работы, а 20% теряется на тепло и другие виды неэффективности. Инженеры могут помочь восстановить эти потери, используя синхронные двигатели, чтобы «опередить» коэффициент мощности или вырабатывать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дано вращение на входе). Часто синхронные двигатели работают в паре с асинхронными двигателями, чтобы скорректировать индуктивные потери мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По причинам, описанным ранее, синхронные двигатели дороже в производстве, внедрении, обслуживании и ремонте, чем асинхронные двигатели. Однако можно утверждать, что их способность к экономии энергии и коррекции коэффициента мощности может компенсировать более высокие начальные затраты. Верно ли это, будет в конечном итоге зависеть от конкретных приложений, но это следует учитывать, поскольку общие затраты жизненного цикла всегда должны быть минимизированы в любом проекте.
Сводка
В этой статье представлено краткое сравнение асинхронных двигателей переменного тока и синхронных двигателей. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http: // www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://electricalacademia.com/induction-motor/torque-speed-characteristics-induction-motor/
Прочие изделия из двигателей
Больше от Machinery, Tools & Supplies
Разница между асинхронным двигателем и синхронным двигателем
В этой статье рассматриваются ключевые различия между асинхронным двигателем и синхронным двигателем на основе нескольких важных факторов, таких как конструкция, механизм запуска, возбуждение, контроль скорости, коэффициент мощности, изменение нагрузки, стоимость, Скольжение, эффективность и приложения.
Асинхронный двигатель является наиболее распространенным типом двигателей переменного тока. Он относительно недорог в сборке, очень прочен и не требует значительного обслуживания. Однофазные асинхронные двигатели используются в жилых и коммерческих помещениях, но промышленность полагается на трехфазные асинхронные двигатели для их плавной работы и более высокого КПД.
Синхронный двигатель преобразует электрическую энергию в механическую. Синхронный двигатель обеспечивает крутящий момент и мощность, когда он работает с синхронной скоростью.Это настоящий двигатель с постоянной скоростью, при условии, что электрическая частота постоянна. Недостатком синхронной скорости является то, что для нее требуется система возбуждения, которая увеличивает первоначальные и текущие затраты на двигатель.
| Характеристики | Синхронный двигатель | Асинхронный двигатель |
| Конструкция | Конструкция, конструкция и конструкция сложны | Конструкция проще, особенно в случае конструкции ротора с сепаратором . |
| Пусковой механизм | Пусковой механизм необходим для первоначального вращения ротора, близкого к синхронной скорости. | Пусковой механизм не требуется. |
| Возбуждение | Для возбуждения ротора требуется отдельный источник постоянного тока. | Ротор возбуждается наведенной ЭДС, поэтому отдельный источник не требуется. |
| Регулировка скорости | Регулировка скорости невозможна. | Регулировать скорость можно разными способами. |
| Скорость против нагрузки | По мере увеличения нагрузки угол нагрузки увеличивается, при этом скорость остается постоянной. (независимо от изменения нагрузки) | По мере увеличения нагрузки скорость продолжает уменьшаться. (зависит от изменения нагрузки) |
| Коэффициент мощности | Изменяя возбуждение, можно регулировать коэффициент мощности двигателя. (запаздывающий / опережающий) | Всегда работает с запаздывающим коэффициентом мощности. |
| Повышение коэффициента мощности | Может использоваться в качестве синхронного конденсатора для повышения коэффициента мощности. | Не может использоваться в качестве синхронного конденсатора. |
| Изменение нагрузки | Двигатель чувствителен к резким изменениям нагрузки и результатам колебаний. | Явление охоты отсутствует. |
| Стоимость | Двигатель дорог и требует частого обслуживания | Двигатель дешев, особенно ротор с сепаратором, и требует меньшего обслуживания. |
| Скольжение | Ноль | 0 |
| Эффективность | Они более эффективны. | Они менее эффективны. |
| Приложения | Они используются в синхронных часах, прецизионных сервомеханизмах и магнитофонах. | Трехфазные асинхронные двигатели широко используются в различных промышленных приложениях, тогда как однофазные асинхронные двигатели используются в различных бытовых приборах. |
Разница между синхронным двигателем и асинхронным двигателем
Разница между синхронным двигателем и асинхронным двигателем:
В этом мы увидим основное различие между синхронным двигателем и асинхронным двигателем. Синхронные двигатели вращают скорость вращающегося магнитного поля, скорость постоянна, у них только одна скорость, что означает, что скорость двигателя всегда синхронизирована с частотой питания.
Асинхронный двигатель
работает по принципу вращающегося трансформатора; магнитный поток ротора всегда пытается поймать магнитное поле статора. Поскольку скорость асинхронного двигателя меньше синхронной скорости двигателя. Синхронная скорость двигателя Ns = 120f / P
- Для данной частоты синхронный двигатель работает с постоянной скоростью (синхронная скорость), скорость двигателя не зависит от нагрузки двигателя. Везде, где работает асинхронный двигатель, скорость уменьшается по мере увеличения нагрузки двигателя.Принцип асинхронного двигателя состоит в том, чтобы уловить синхронную скорость двигателя; Вращающееся магнитное поле пытается достичь своей первоначальной синхронной скорости.
- Коэффициент мощности двигателя: Синхронный двигатель может работать как с опережающим, так и с запаздывающим коэффициентом мощности в зависимости от его возбуждения, но асинхронный двигатель не может работать с опережающим коэффициентом мощности, индукция работает с отстающим коэффициентом мощности.
- Синхронные двигатели — это двигатели с двойным возбуждением, что означает, что им требуются две обмотки и два отдельных возбуждения, в то время как асинхронные двигатели с короткозамкнутым ротором имеют только одну обмотку.Но асинхронные двигатели с контактным кольцом имеют двойную обмотку, которая имеет намотанный ротор для увеличения сопротивления обмотки ротора, однако этим двигателям не требуется отдельная система возбуждения, как у асинхронного двигателя. Приложенного к статору напряжения достаточно для запуска двигателя.
- Синхронный двигатель может использоваться как генератор для подачи электроэнергии, но асинхронный двигатель никогда не производит электричество, он потребляет электричество.
- Синхронные двигатели не являются самозапускающимися двигателями, в то время как асинхронные двигатели являются самозапускающимися двигателями, для них не требуется отдельное пусковое оборудование.
- Синхронные двигатели имеют более высокий КПД, чем асинхронные двигатели
- Синхронные двигатели дороже, почти 25% стоимости двигателей приходится на обмотки ротора, но асинхронные двигатели дешевле
- Используется в приложениях с постоянной скоростью; скорость асинхронного двигателя может изменяться.
Предыдущая статьяРазница между силовым трансформатором и распределительным трансформаторомСледующая статьяЧто такое рейтинг Icu Ics Icw Icm автоматического выключателя.